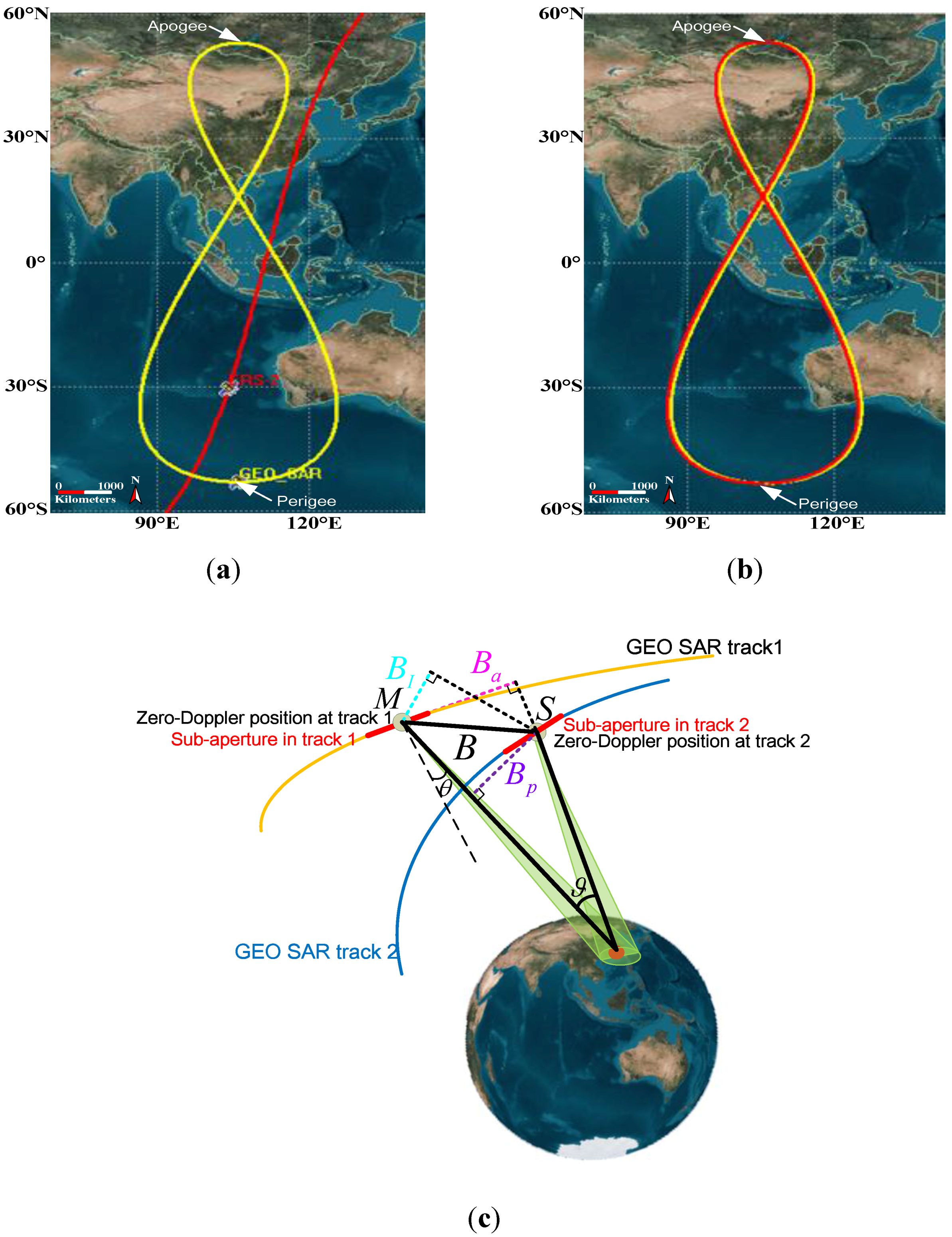
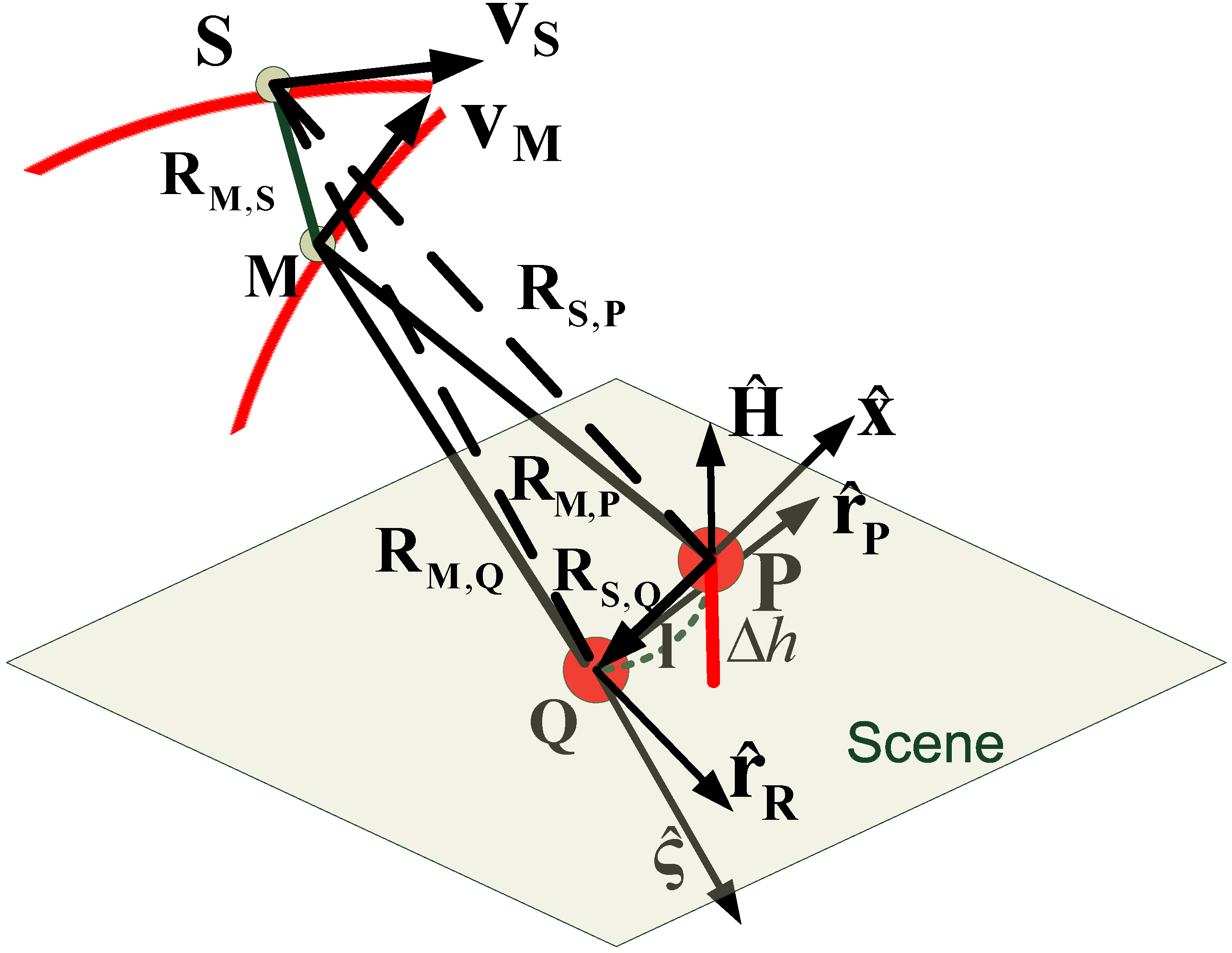
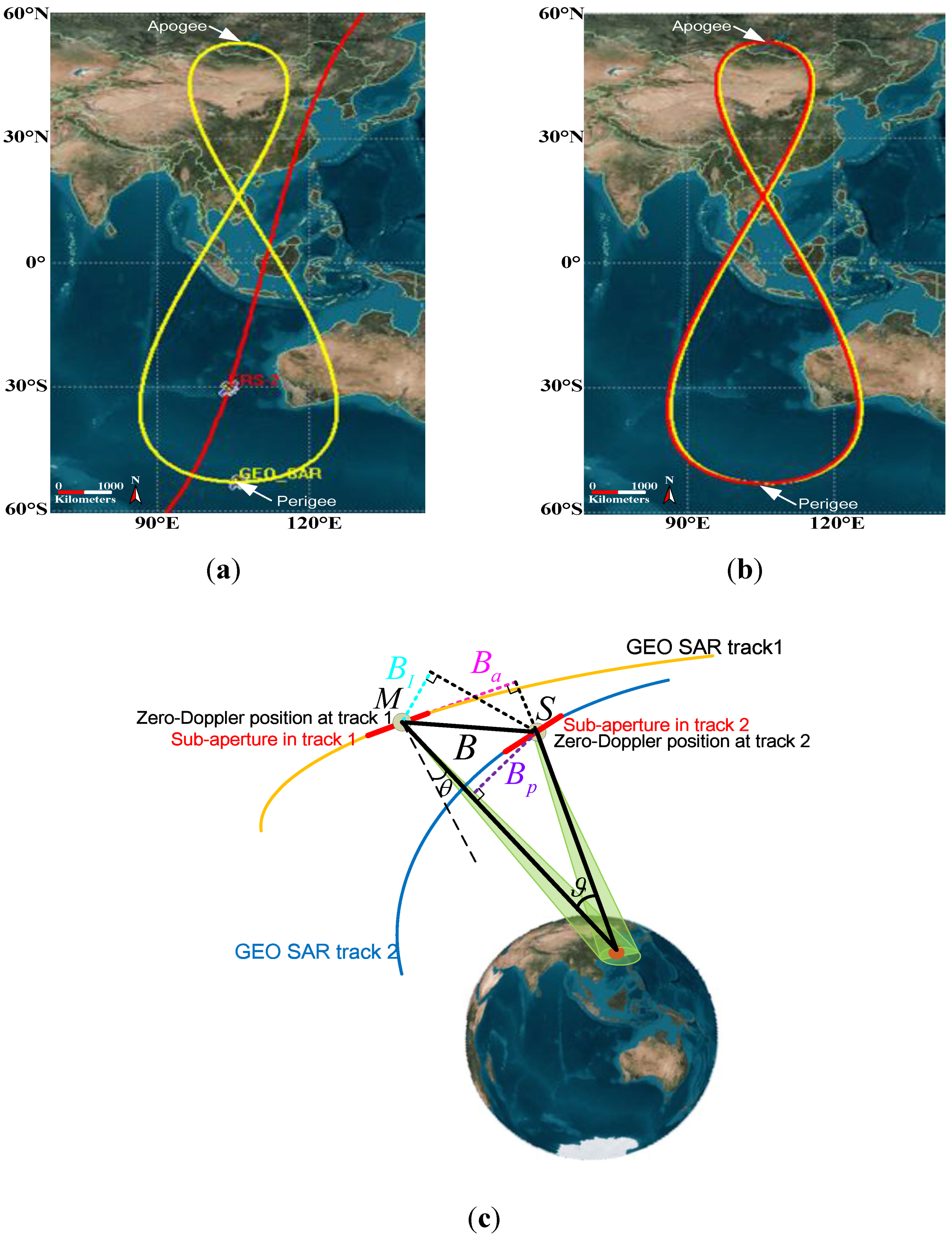
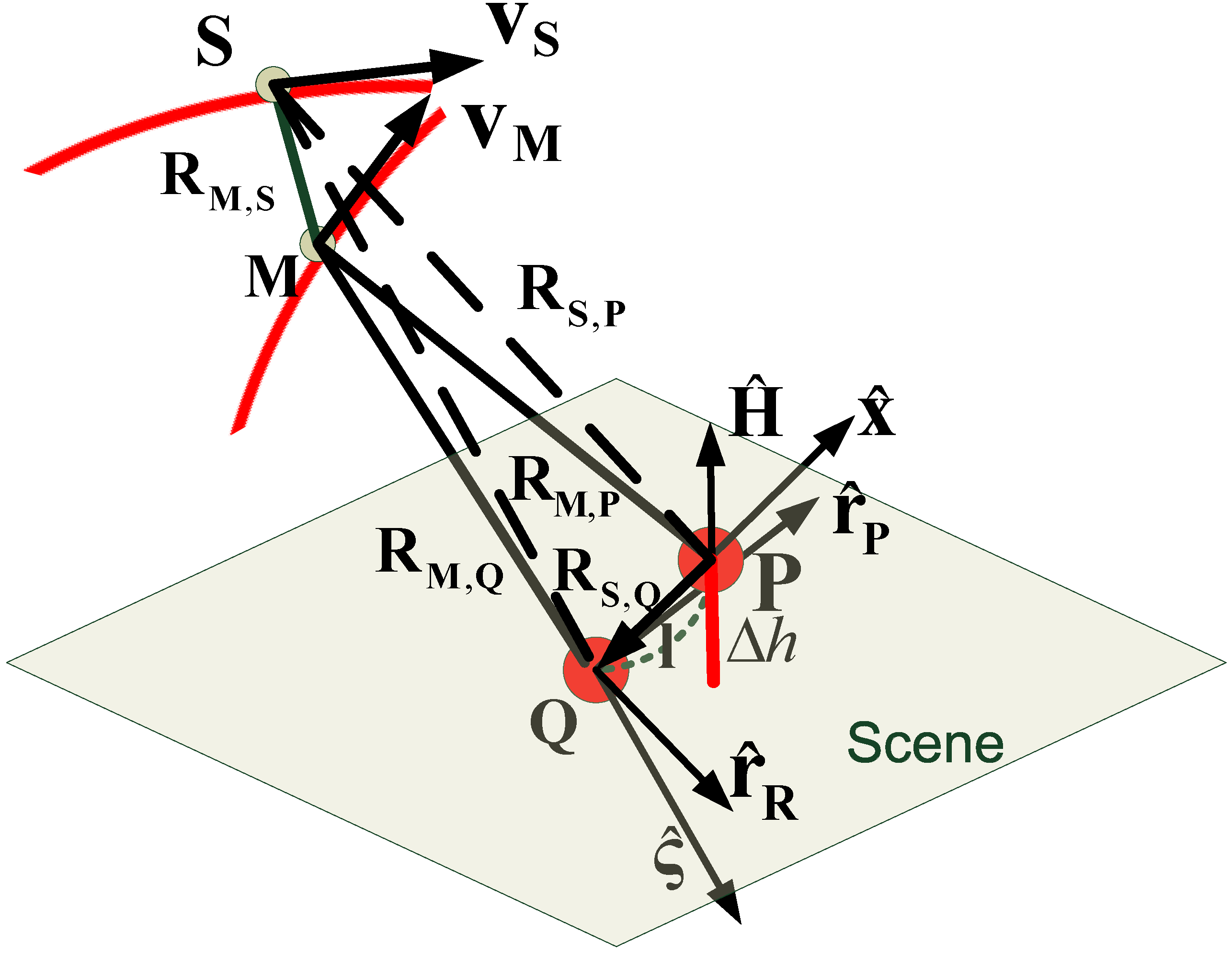
Considering the special issues of un-parallel repeated tracks and the squint-looking mode in GEO InSAR, a novel OMRD data acquisition method and a GEO InSAR height retrieval model are proposed in this section to address the issues. In order to demonstrate the issues conveniently, GEO InSAR geometry is introduced firstly in
Figure 4.
and
represent the satellite positions of GEO InSAR tracks, and
is their distance vector.
represents a target that has a height with respect to the global ellipsoid, and
is its geometric projection on the global ellipsoid with respect to the first pass of the InSAR tracks.
is the distance vector between
and
;
is the distance vector between
and
;
is the distance vector between
and
;
is the distance vector between
and
.
is the distance vector from
to
.
and
are the velocity vectors of the GEO SAR in the first track and the second track, respectively.
is the project unit vector corresponding to the range direction unit vector
with respect to the tangent plane of the global ellipsoid, and
represents the perpendicular direction of
.
is the azimuth direction vector.
is the height of the target with respect to the global ellipsoid, and
is the height direction unit vector.
Figure 4.
Sketch map of the GEO InSAR geometry.
3.1. OMRD Data Acquisition Method
The data acquisition of the repeat-track GEO InSAR is a process of the sub-aperture selection, and it is realized by determining of sub-aperture center moments. The sub-aperture center moment in the first track is determined by the observation moment of the scene of interest, and the corresponding sub-aperture is obtained according to the length of the integration time. Nevertheless, the selection of the sub-aperture center moment and the related sub-aperture in the second orbit is vital, because it determines the quality of the produced InSAR pair. Because the obtained GEO InSAR pair based on the ZDCs has serious rotation-induced decorrelation, the OMRD data acquisition method is induced to deal with the issue in the following part.
In InSAR, the correlation coefficient is mainly affected by several factors [
6] as:
where
is the thermal noise decorrelation,
is the geometric decorrelation and
is the temporal decorrelation.
Because
is mainly impacted by data acquisition methods, it is studied in detail. Based on the basic concept of wavenumber domain analysis in [
2],
is expressed as:
where
represents the surface scatter unit,
is the surface backscatter coefficient,
represents the integral unit,
is the range between
and
at the aperture center moment,
and
are the azimuth time and the range time, respectively,
and
are the positions of targets at the aperture center moments of the InSAR pair,
and
are the impulse response functions of the InSAR system and ψ is the interferometric phase.
and
are wave vectors, which are expressed by:
assuming that the GEO InSAR system works in a fixed center carrier frequency,
.
For simplicity, from Equations (6) and (7) (see the
Appendix for details), we have:
where
and
are spectral shifts in the range and azimuth respectively, which can be expressed as:
Variables
to
and
to
only depend on the GEO InSAR geometry and can be expressed as:
where
is the velocity at the aperture center moment in the second GEO SAR track,
is the vector difference of
and
,
is the vector difference of
and
and
is determined by the cross product of the orthonormal basis
and
.
According to Equation (9), relates to the interferometric baseline and depends on the squint-looking mode. As for Equation (10), is impacted by many components, including the effects of the un-parallel repeated tracks , the squint-looking mode and their coupling term .
According to Equations (9) and (10), the mismatch of the 2D spatial spectra of the GEO InSAR pair exists if
and
are not zero, which makes the GEO InSAR pair decorrelate. Thus,
can be expressed as:
where
(related to
) is mainly induced by the interferometric baseline decorrelation and
(related to
) is induced by the rotation-induced decorrelation.
should not be eliminated, because the interferometric baseline should not equal zero in the height retrieval. On the basis of the range spatial spectral bandwidth determined by the range bandwidth
, the critical baseline
, which is the upper limitation of interferometric baseline, is expressed as:
Especially, in the case of the slight squint angle, Equation (14) can be simplified as:
is useless for the height retrieval and
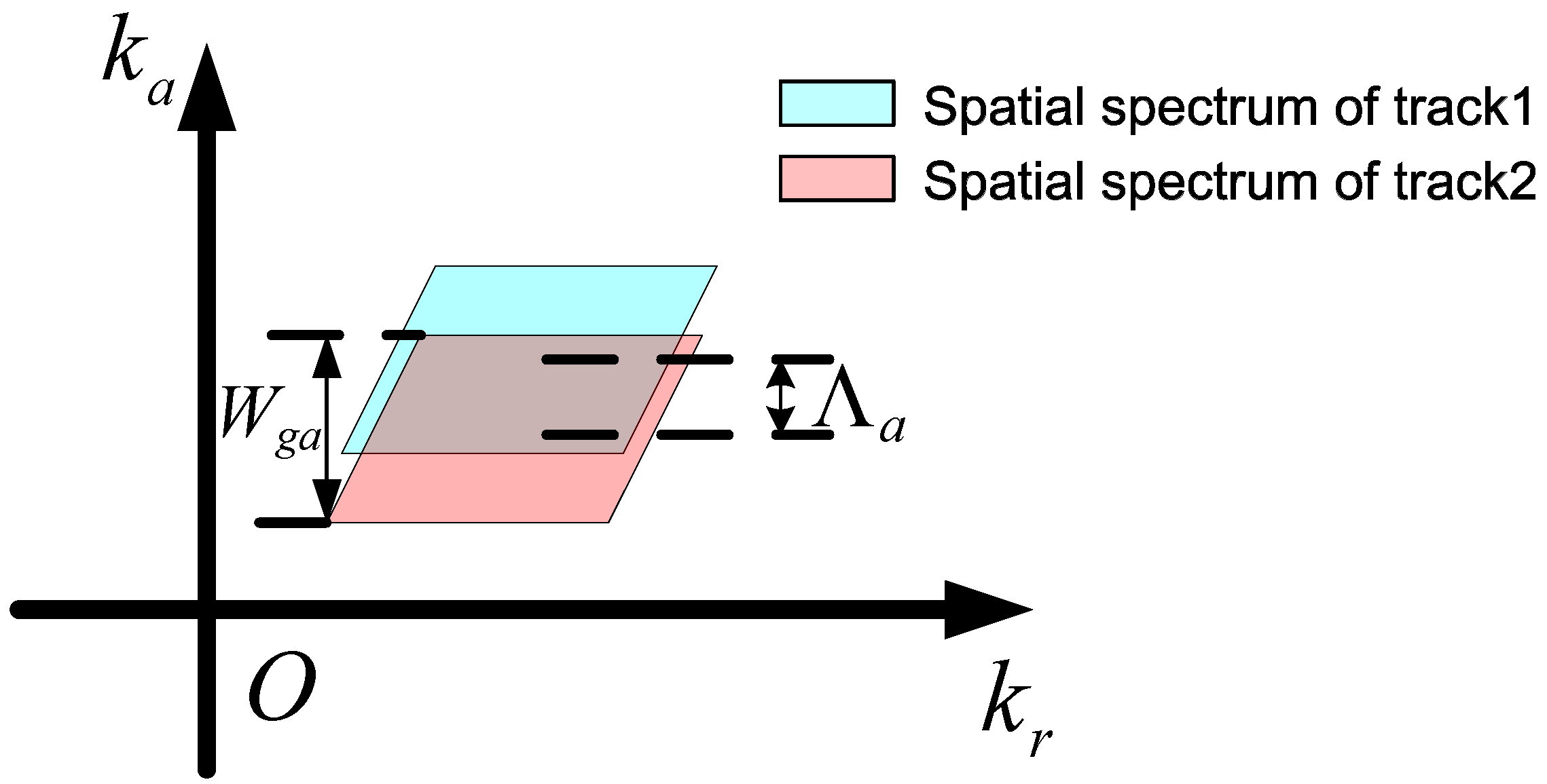
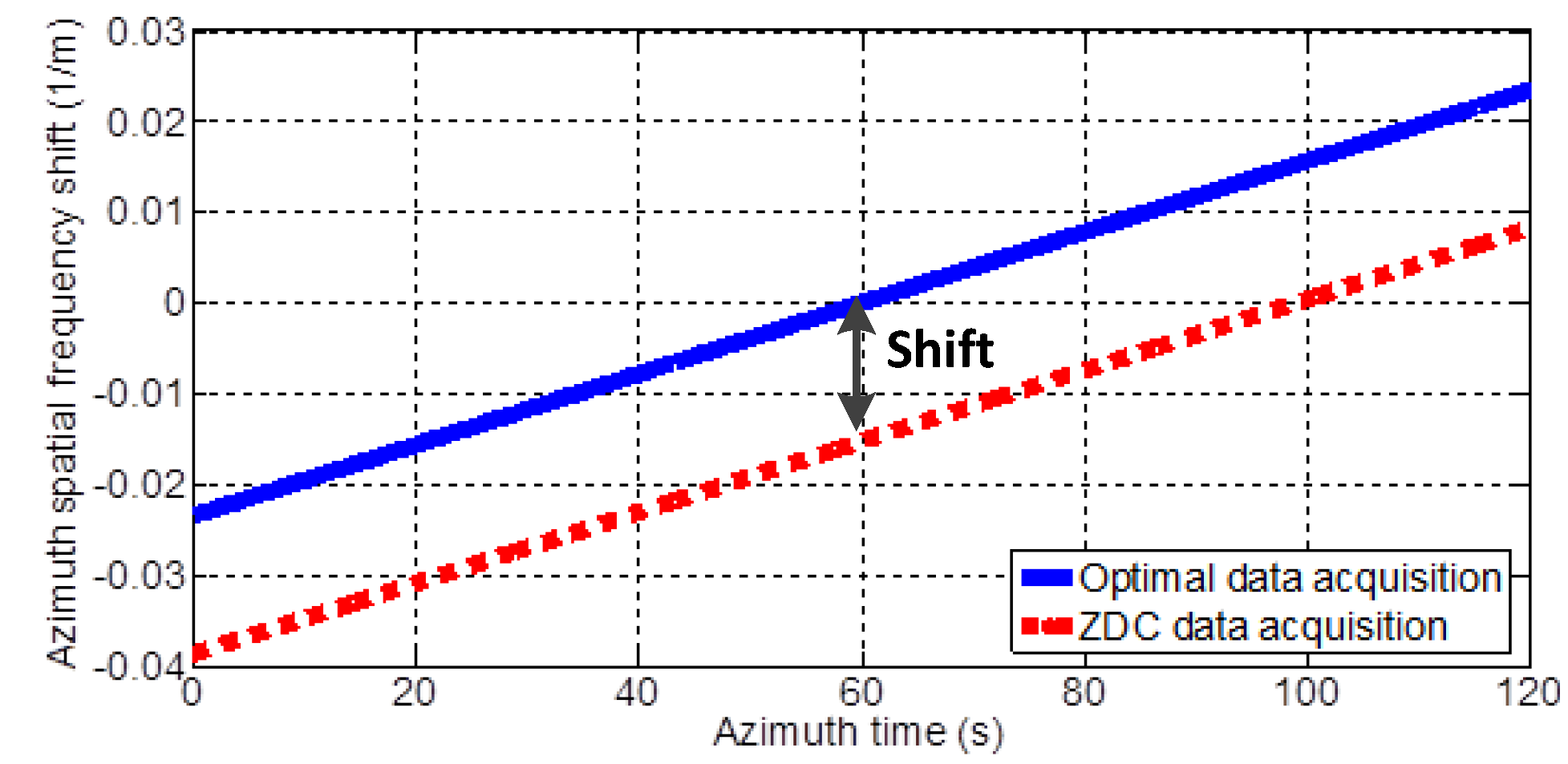
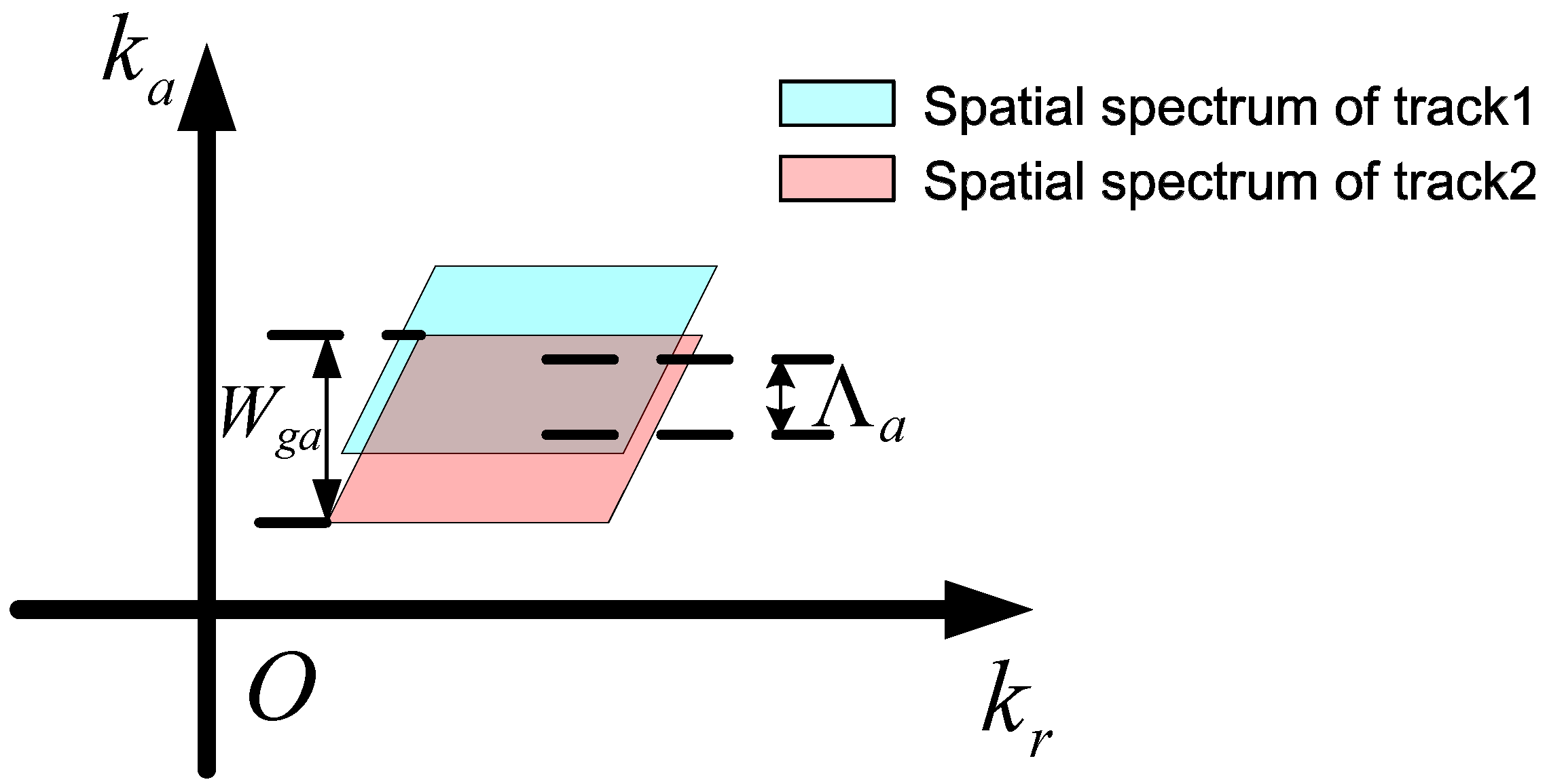
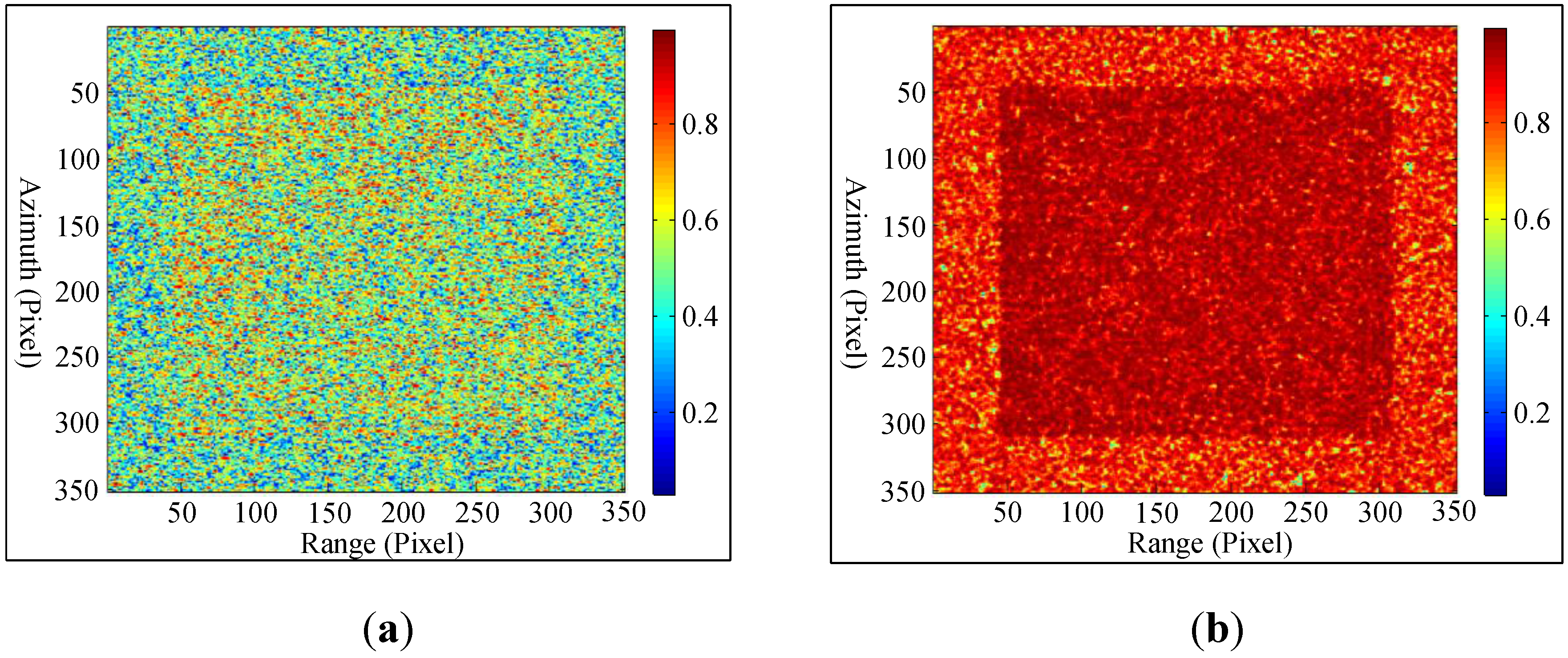
should be one for obtaining high coherence. Conventionally, when the ZDCs are employed, Equation (10) is expressed as:
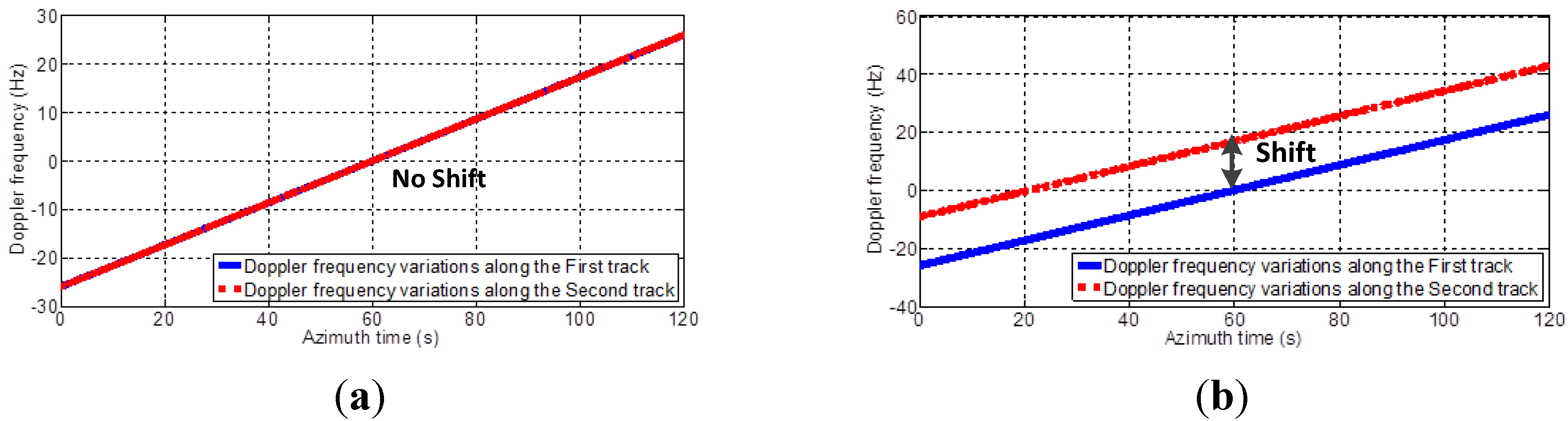
In LEO SAR, the repeated tracks are nearly perfectly parallel. Thus,
is zero, and
is zero. The spatial spectra of the InSAR pair in the azimuth are coherent, and the minimum rotation-induced decorrelation can be obtained (
i.e.,
). However in GEO SAR, the repeated tracks are un-parallel, and the geometry is squint. Thus,
is non-zero, and
is non-zero, if using ZDC data acquisition. In this case, the rotation-induced decorrelation exists (
i.e.,
) as the overlapped azimuth spatial spectra of the GEO InSAR pair decrease. By employing the azimuth bandwidth
,
is expressed as:
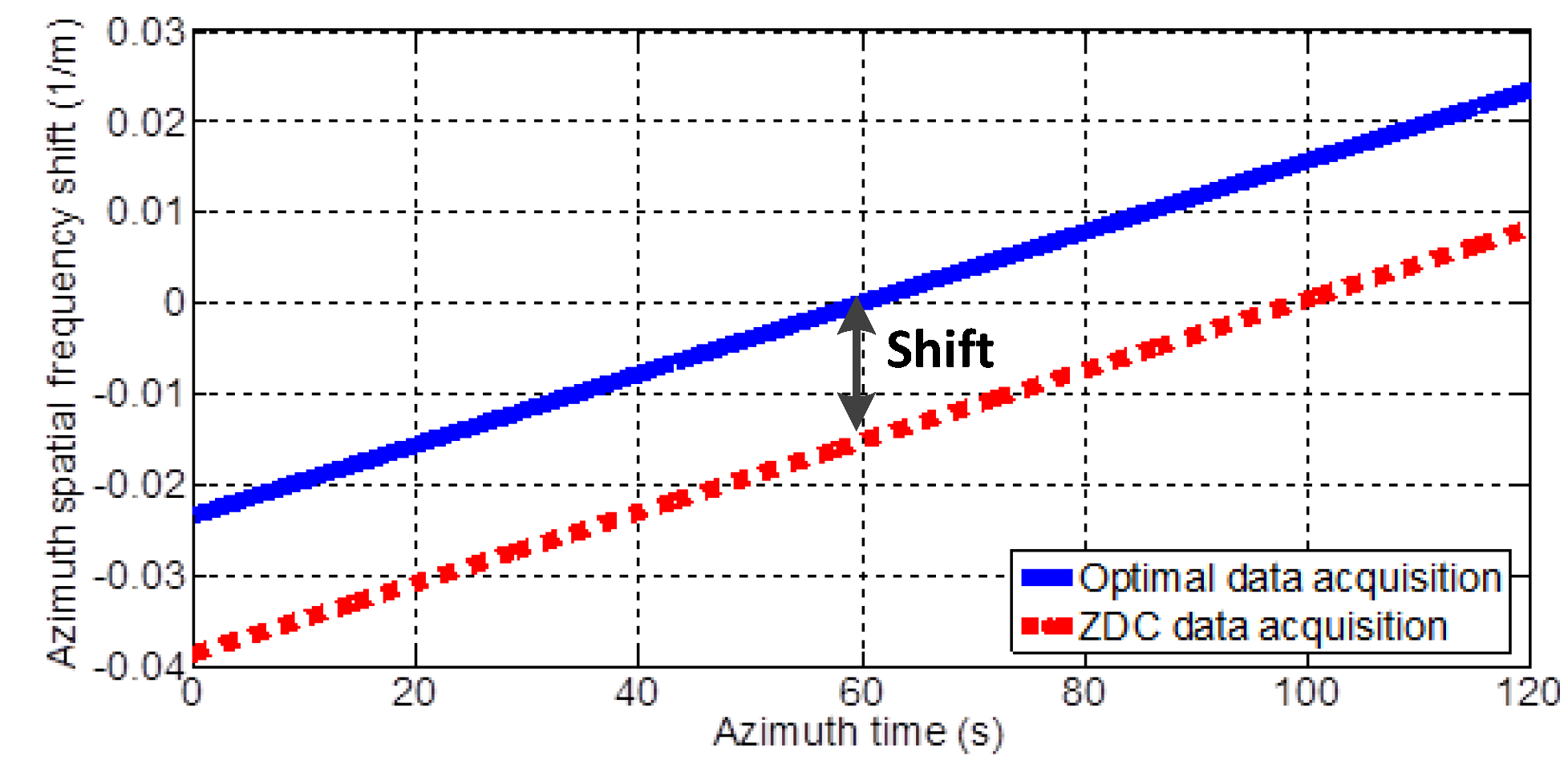
In order to maximize the overlaps of the spatial spectra of the GEO InSAR pair in the azimuth and to minimize the rotation-induced decorrelation, the criterion is proposed to realize the optimal selection of the aperture center moment and the corresponding sub-aperture in the second track. It is given as:
where
is the proper satellite position at the second track,τ is the azimuth moment of the second aperture and
is the aperture center moment of the second sub-aperture.
The operation is summarized as follows:
Step 1: Based on (18), search the proper satellite position by the step corresponding to the pulse repeated time along the full aperture of the second track ;
Step 2: Use the determined moment as the aperture center moment of the second sub-aperture;
Step 3: According to the integration time , the corresponding sub-aperture of the second track is determined as .
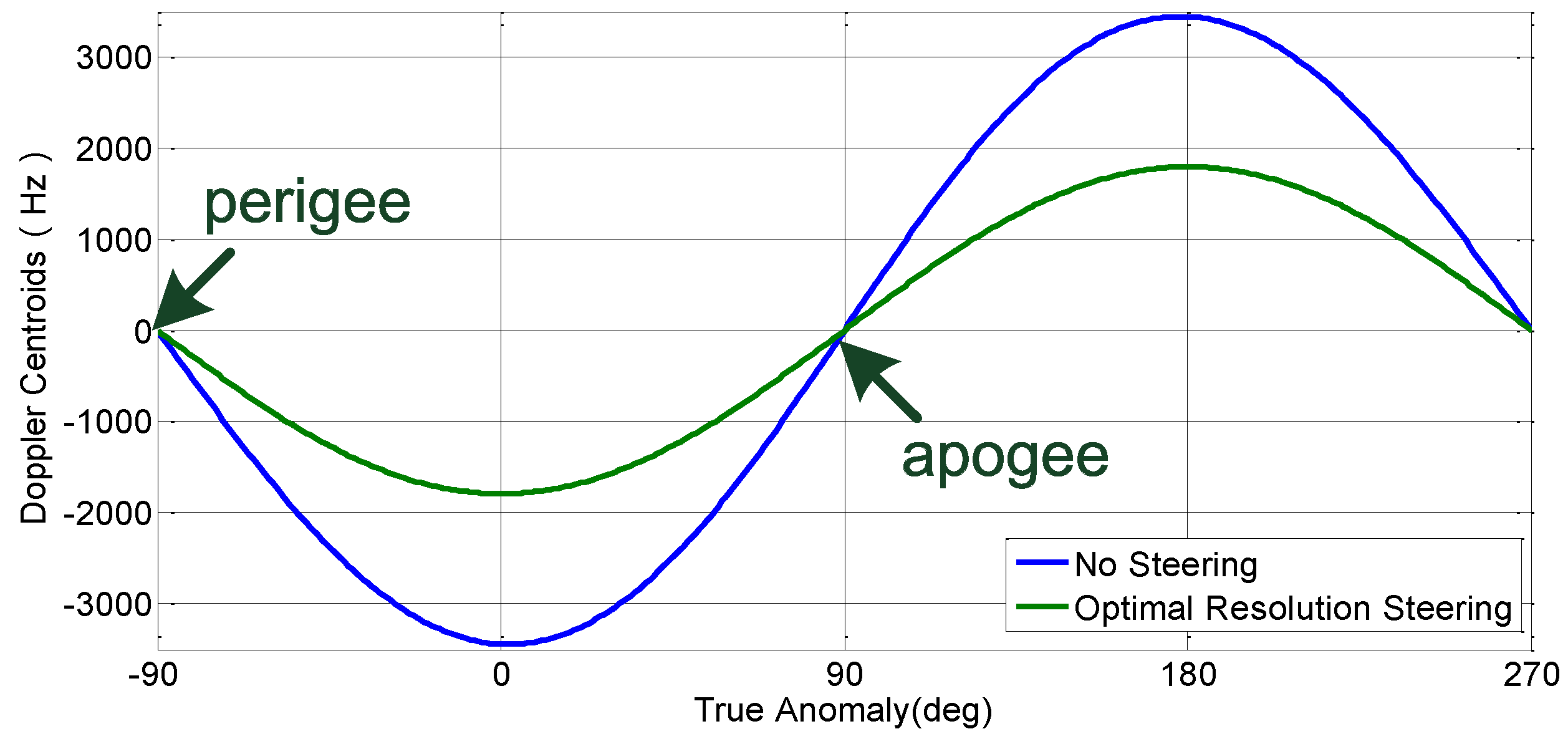
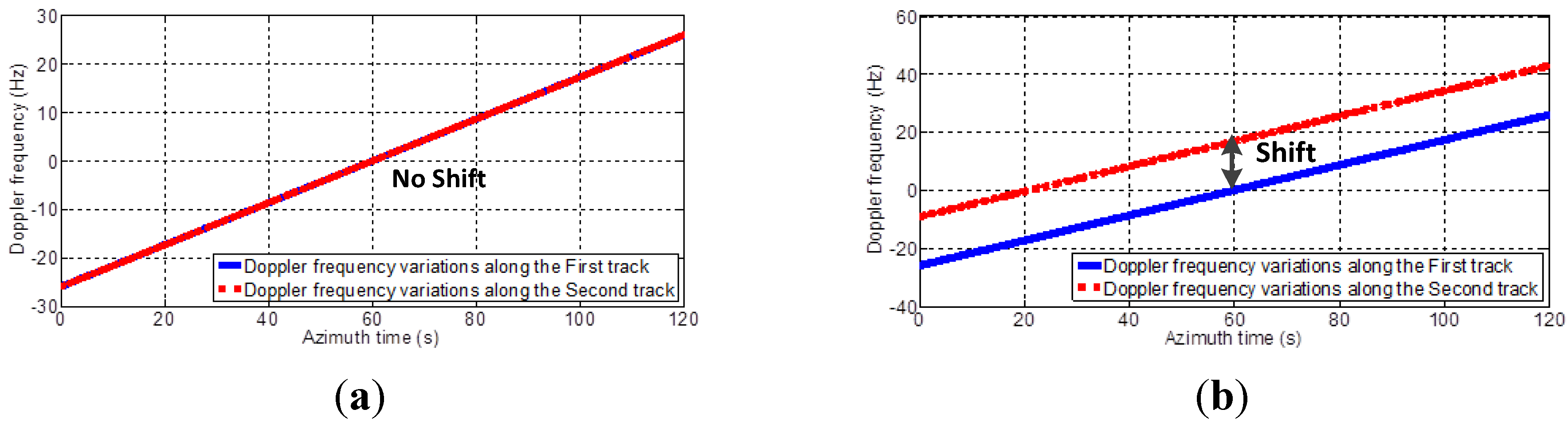
Hereby, the GEO InSAR pair is obtained based on (18). Though the Doppler centroid shifts exist, the maximal coherence of the GEO InSAR pair in the azimuth is achieved as the rotation-induced decorrelation is minimized, and the azimuth spatial spectra are coherent.
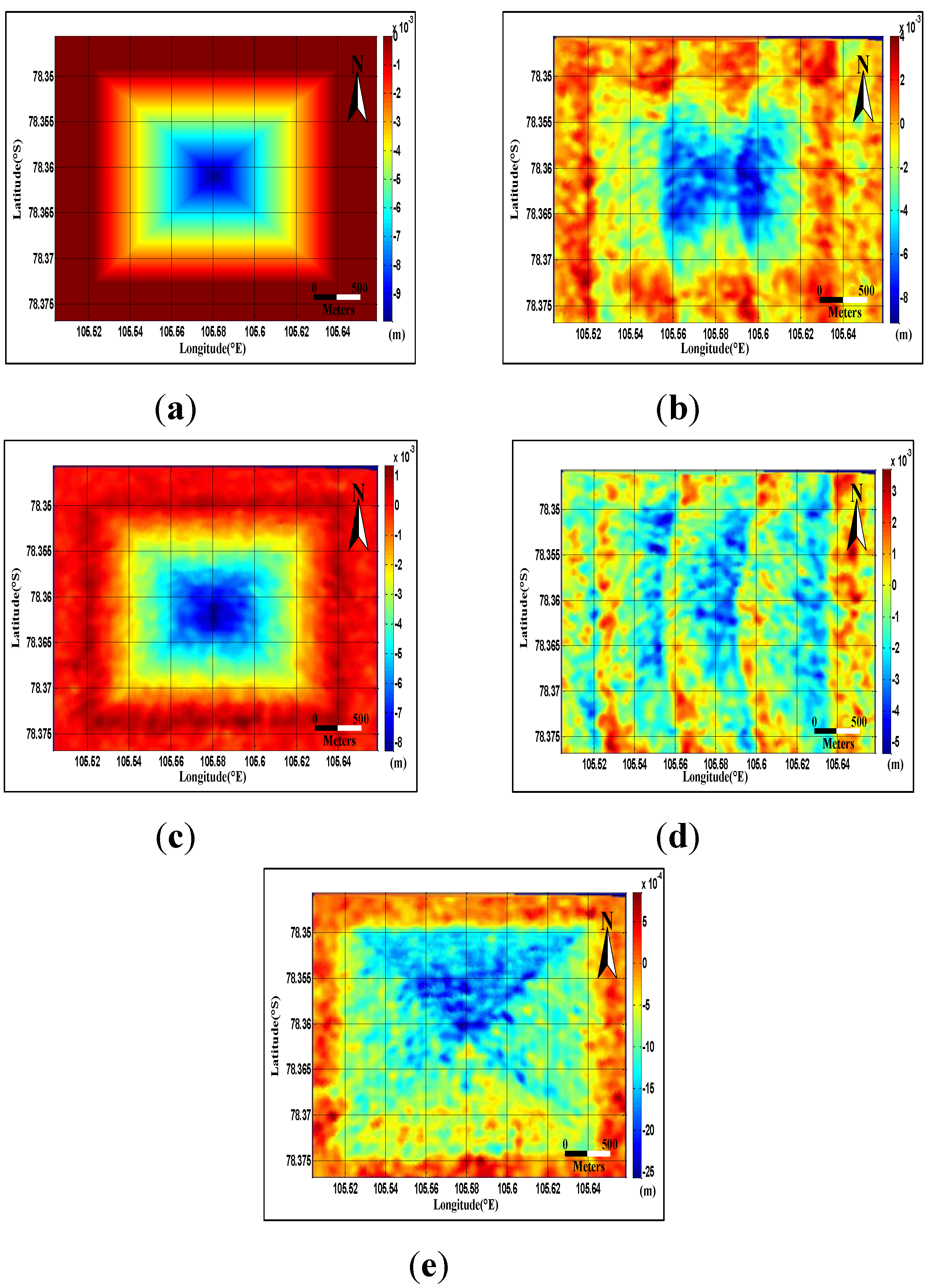
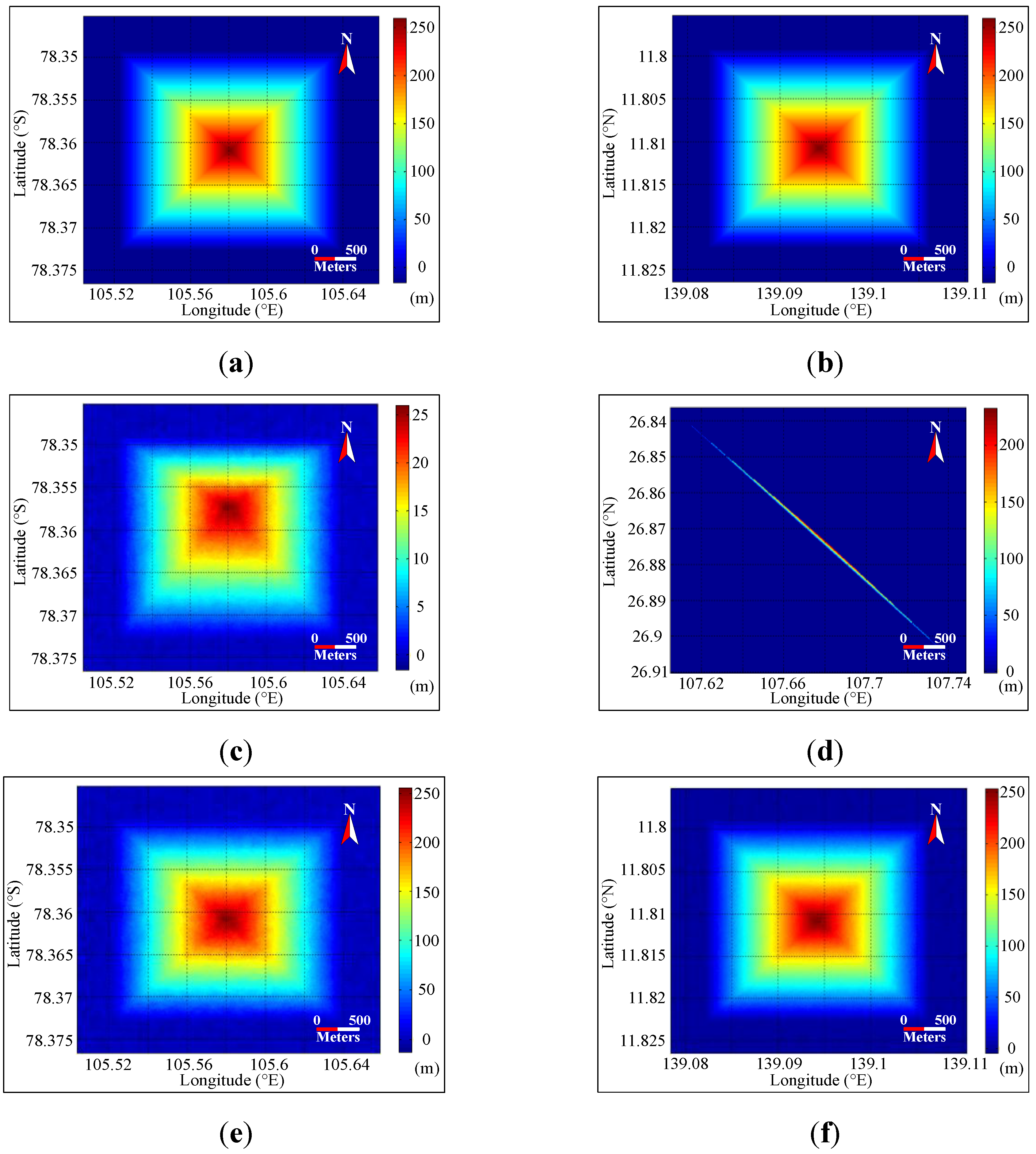
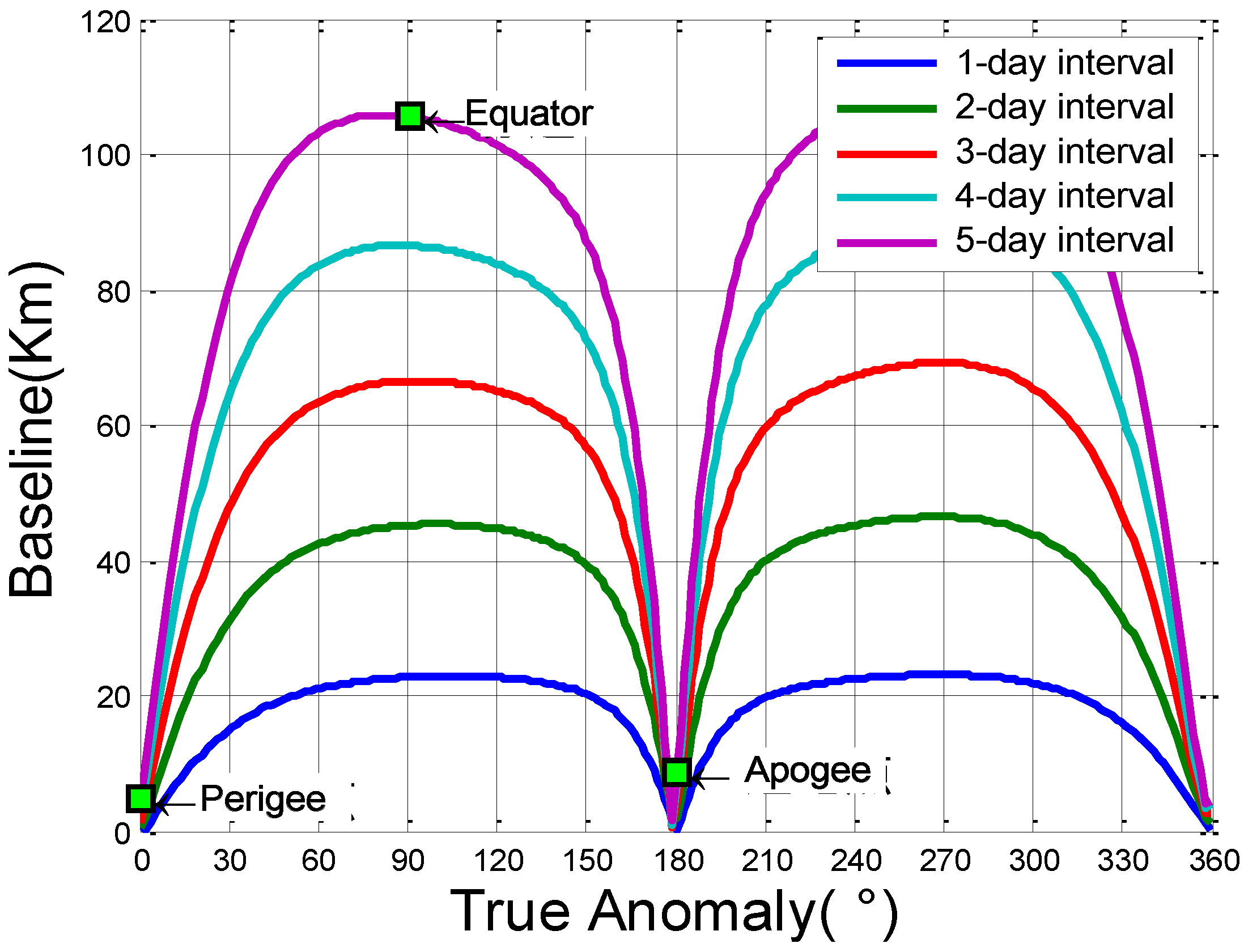
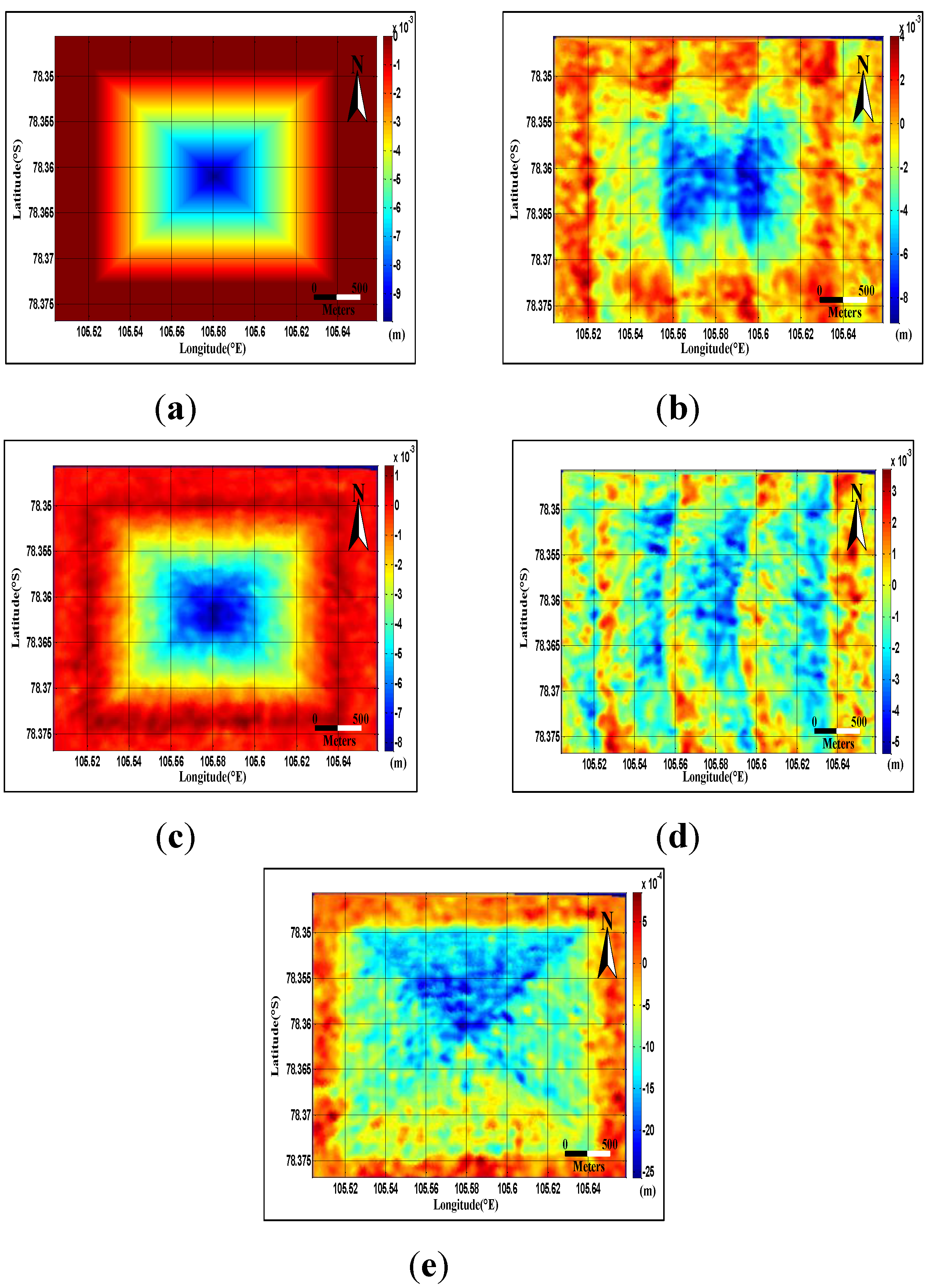
Because of the long full aperture (nearly one thousand seconds for one full aperture) and the relatively limited un-parallelism of the repeated trajectories of GEO SAR, the proposed OMRD data acquisition method can avoid complete azimuth decorrelation in the designing phase. Assuming the observation in the first track is at perigee, it is one of the places with the most serious un-parallel repeated trajectories. The GEO SAR coverage time analysis of a target (78.36°S, 105.58°E) is shown in
Table 4 by STK simulations. Since the revisit time of GEO SAR is not exactly 24 hours (3 min 56.4 s bias), the access time in
Table 4 is corrected by the bias. It can be shown that the full aperture times of the InSAR pair are overlapped about 739 s (99.6% of the full aperture) in a one-day interval case and about 728 s (98.1% of the full aperture) in a five-day interval case. The full apertures of the InSAR pair will have no common part (giving rise to the complete azimuth decorrelation) after nearly two months. Since the OMRD can work when the full apertures of the InSAR pair have the overlapped part, the GEO InSAR pair with the complete azimuth coherence (the coherent azimuth spatial spectra) can be obtained by the OMRD method when the time interval of the access time is within two months. As for the longer time, station-keeping is needed for GEO SAR.
Table 4.
GEO SAR coverage time analysis of a target by Systems Tool Kit (STK) simulations (78.36°S, 105.58°E) (30-m diameter antenna).
Table 4.
GEO SAR coverage time analysis of a target by Systems Tool Kit (STK) simulations (78.36°S, 105.58°E) (30-m diameter antenna).
| Access Time (day) | Access Start (UTC) | Access End (UTC) | Overlapped Time (s) | Full Aperture (s) |
|---|
| 1 | 1 September 2015 03:50:12.247 | 1 September 2015 04:02:34.008 | – | 741.761 |
| 2 | 2 September 2015 03:50:14.769 | 2 September 2015 04:02:36.536 | 739 | 741.768 |
| 6 | 6 September 2015 03:50:28.494 | 6 September 2015 04:02:50.326 | 728 | 741.832 |
| 31 | 1 October 2015 03:54:49.051 | 1 October 2015 04:07:10.908 | 466 | 741.856 |
| 46 | 16 October 2015 03:58:49.970 | 16 October 2015 04:11:11.867 | 224 | 741.897 |
| 61 | 31 October 2015 04:03:49.464 | 31 October 2015 04:16:11.608 | 0 | 742.144 |
After the rotation-induced decorrelation is removed by the OMRD method, the obtained better azimuth coherence will result in lower phase noise and higher height accuracy. If the total coherence raises from
to
is not equal to one because of
and
), the phase variance in the single-look image pair will decrease by [
2,
5]:
where
is the decrease of the phase variance and
is Euler’s dilogarithm, defined as:






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}