1. Introduction
The primary objective of the Landsat-8 (L8) mission operation is to collect, archive, process and distribute science data in a manner consistent with the existing Landsat data record [
1,
2]. L8 has a temporal repeat cycle of 16 days with an orbit phased 8 days from Landsat-7 (L7), which means that Landsat data (7 or 8) are now available every 8 days for many land areas of the Earth. L8 is referenced to the WRS-2 system and operates in a 705 km near-circular polar, sun synchronous orbit with an equatorial crossing at approximately 10:13 a.m. mean local time during the descending node of each orbit. L8 has two sensors on board, Operational Land Imager (OLI) and the Thermal Infrared Sensor (TIRS) and these two sensors collect data nearly coincidentally. Requirements are for data calibrated within an uncertainty of better than 5% (1 sigma) in terms of at-sensor-radiance (comparable to L7 Enhanced Thematic Mapper Plus (L7 ETM+)) and better than 3% in top of atmosphere (TOA) reflectance space for each spectral band [
2].
The Landsat archive contains the longest continuous record of the Earth’s surface, as viewed from space, with the Landsat 8 mission extending this record to more than 42 years (and counting). Because of its temporal coverage, spatial resolution at an appropriate scale for monitoring human activity, as well as the benefit of free access to the public, the Landsat data record is important for land cover change research and global climate change studies. A key precursor for these studies is the consistent radiometric calibration of the satellite sensors and radiometric stability of the Landsat sensors. This element has been a key contributing factor to the overall success of the Landsat mission. In this context, on-going characterization of OLI data is critical to maintain the continuity of high data quality.
Landsat calibration has always relied on the expertise and the best efforts of several agencies and universities. The Calibration and Validation Team (CVT) for L8 consists of a team from NASA Goddard Space Flight Center (GSFC), U. S. Geological Survey (USGS) Earth Resources Observation and Science Center (EROS), South Dakota State University (SDSU), University of Arizona (U of A), Rochester Institute of Science and Technology (RIT) in Rochester, New York and the Jet Propulsion Laboratory (JPL) in California. These teams are responsible for monitoring the overall health of the Landsat instruments with various post launch calibration techniques that include monitoring stability of the instrument with on-board calibrators, vicarious ground-based calibration and PICS-based calibration to name a few.
In this paper, cross-calibration results of OLI and ETM+ instruments performed at SDSU and USGS EROS are presented. The objective of this continuing study is twofold: to monitor the radiometric calibration consistency of the OLI sensor and to provide a first order cross calibration between the two existing Landsat instruments which will tie all the Landsat instruments to a consistent radiometric scale. It should be noted that the CVT has also created a database for temporally monitoring the radiometric stability of OLI using the sensor’s response to lamp pairs, solar diffusers and lunar acquisitions [
3]. This has provided independent validation of the temporal stability of the OLI instrument for top of atmosphere in-band response.
3. Method Overview
As stated earlier, cross calibration between ETM+ and OLI was performed using images acquired by these two sensors during the commissioning phase “underfly” and using image statistics over Libya 4 PICS. On 29–30 March 2013, L8 was in a lower altitude orbit that provided a similar ground track to L7 to give a period of near-coincident data collects to directly cross compare ETM+ & OLI. During the underfly period, none of the well characterized PICS [
14] sites traditionally used for Landsat and other sensor calibration were within view of Landsat-8, so these simultaneous image data were supplemented by PICS analyses.
PICS-based calibration methods have been used by numerous researchers over an extended period of time [
12,
14,
15,
16,
17,
18] A host of PICS sites have been endorsed by Committee on Earth Observation Satellites (CEOS) and these stable Earth-based sites have been used extensively to monitor the post-launch temporal stability of optical satellite sensors and for cross-calibration/inter-comparison purposes [
12,
19,
20,
21,
22,
23]. In the cross-calibration method, the response of the sensor under investigation is compared against a reference sensor that is believed to be well calibrated over time [
19,
20,
24,
25,
26]. In order to achieve best results, a large homogeneous area is imaged simultaneously or nearly simultaneously by the two sensors using similar viewing angles, ideally nadir. Once spectral equivalency has been performed using the SBAF technique, for a stable atmosphere, the in-band radiances can be directly compared to determine any sensor calibration differences. This cross-calibration is a vital step not only to establish the relative calibration of the satellite sensors but also to ensure that data from multiple sensors can be used to provide a consistent set of measurements. The current work focuses on the cross-comparison of L8 OLI to L7 ETM+. The ETM+ sensor has been extremely stable since launch and successfully operating for over a decade and has been used by researchers for a number of cross-calibration studies [
19,
25,
27]. The use of the ETM+ sensor, in this study, will provide a first order estimate of OLI calibration as compared to the stable ETM+ sensor. It should be noted that a similar cross calibration approach has been used to tie all the Landsat Multispectral Scanner (MSS) suites of sensors (MSS1–MSS5) to L5 TM and L5 TM to L7 ETM+ [
24,
25].
3.1. Test Sites
During the underfly, several African sites were imaged near-coincidentally by ETM+ and OLI. Among these underfly scenes were paths 182 rows 42 and 43 and path 198 rows 38 and 39 where simultaneous or near simultaneous Hyperion data were also collected. The Hyperion data provide an opportunity to account for the spectral band differences as described earlier and provides an alternative to simultaneous ground measurement which is often impossible for remote inaccessible areas. The rationale behind using near simultaneous image pairs for cross calibration is to reduce the uncertainties that may arise due to uncharacterized atmospheric conditions between overpass times. Landsat-7 ETM+ and Landsat-8 OLI images of these sites were collected within 4 minutes of each other. The Hyperion scene of WRS2 path/rows 182/42–43 were acquired three days prior to the L7/L8 scenes. This desert site is located within several hundred kilometers of the North African desert site, Libya 4, which is well known for temporal stability. The other site, WRS2 path/row 198/39 is less uniform with substantial variation of ground structure; however, the Hyperion data was acquired within 20 min of L7/L8 imaging.
Table 1 shows the metadata for the scenes used. As an example,
Figure 3 shows the Hyperion, ETM+ and OLI data over path 198 row 39. Since the swath of Hyperion data is much smaller than L7/L8, small common Regions Of Interest (ROI) were chosen carefully to cover all three geo-registered images. As L8 was in a lower orbit, the pixel size of OLI underfly images was less than 30 m (approximately 29.3 m). However, the scenes were resampled to 30 m pixels and processed through the USGS processing system to generate standard L1T products. Also, during these collections, L8 was flying approximately 40 km to the east of the WRS2 path. To account for the sun angle difference between pixels within an image, a “per pixel sun angle” was used during reflectance calculations over the ROIs of both L7 and L8 images. No BRDF correction was applied under the expectation that differences due BRDF effect should be very minimal as the scenes were acquired within 4 minutes. The statistics over each ROI were generated both in radiance and reflectance space using the L7 and L8 Image Assessment Systems (IAS).
Table 1.
Metadata of scenes used for L7/L8 cross-calibration.
Table 1.
Metadata of scenes used for L7/L8 cross-calibration.
| Sat/Sensor | Acquisition Date | Acquisition Time | WRS2 Path/Row | Scene center Lat/Lon | Sun Elevation (deg) | Sun Azimuth (deg) | Look Angle (deg) |
|---|
| L7 ETM+ | 30 March 2013 | 8:58:11 | 182/42 | 25.996°N/21.557°E | 57.41 | 128.49 | NADIR |
| L8 OLI | 30 March 2013 | 9:02:01 | 182/42 | 26.002°N/21.936°E | 58.43 | 130.10 | NADIR |
| EO-1 HYP* | 27 March 2013 | 8:30:16 | 182/42 | 25.363°N/21.349°E | 51.91 | 121.21 | −0.76 |
| L7 ETM+ | 30 March 2013 | 8:58:35 | 182/43 | 24.557°N/21.206°E | 58.10 | 126.35 | NADIR |
| L8 OLI | 30 March 2013 | 9:02:24 | 182/43 | 24.551°N/21.581°E | 59.15 | 127.91 | NADIR |
| L7 ETM+ | 30 March 2013 | 10:35:52 | 198/39 | 30.312°N/2.058°W | 55.10 | 134.39 | NADIR |
| L8 OLI | 30 March 2013 | 10:39:24 | 198/39 | 30.301°N/1.608°W | 56.03 | 136.08 | NADIR |
| EO-1 HYP* | 30 March 2013 | 10:20:56 | 198/38 | 30.379°N/2.067°W | 53.04 | 130.21 | 23.94 |
Figure 3.
Hyperion, ETM+ and OLI images over path 198, row 39 acquired during the L8 underfly on 30 March 2013. 10 ROIs each of approximately 6 km by 6 km area were chosen from geo-registered L1T products. The co-ordinates of the ROIs are provided in
Table 1.
Figure 3.
Hyperion, ETM+ and OLI images over path 198, row 39 acquired during the L8 underfly on 30 March 2013. 10 ROIs each of approximately 6 km by 6 km area were chosen from geo-registered L1T products. The co-ordinates of the ROIs are provided in
Table 1.
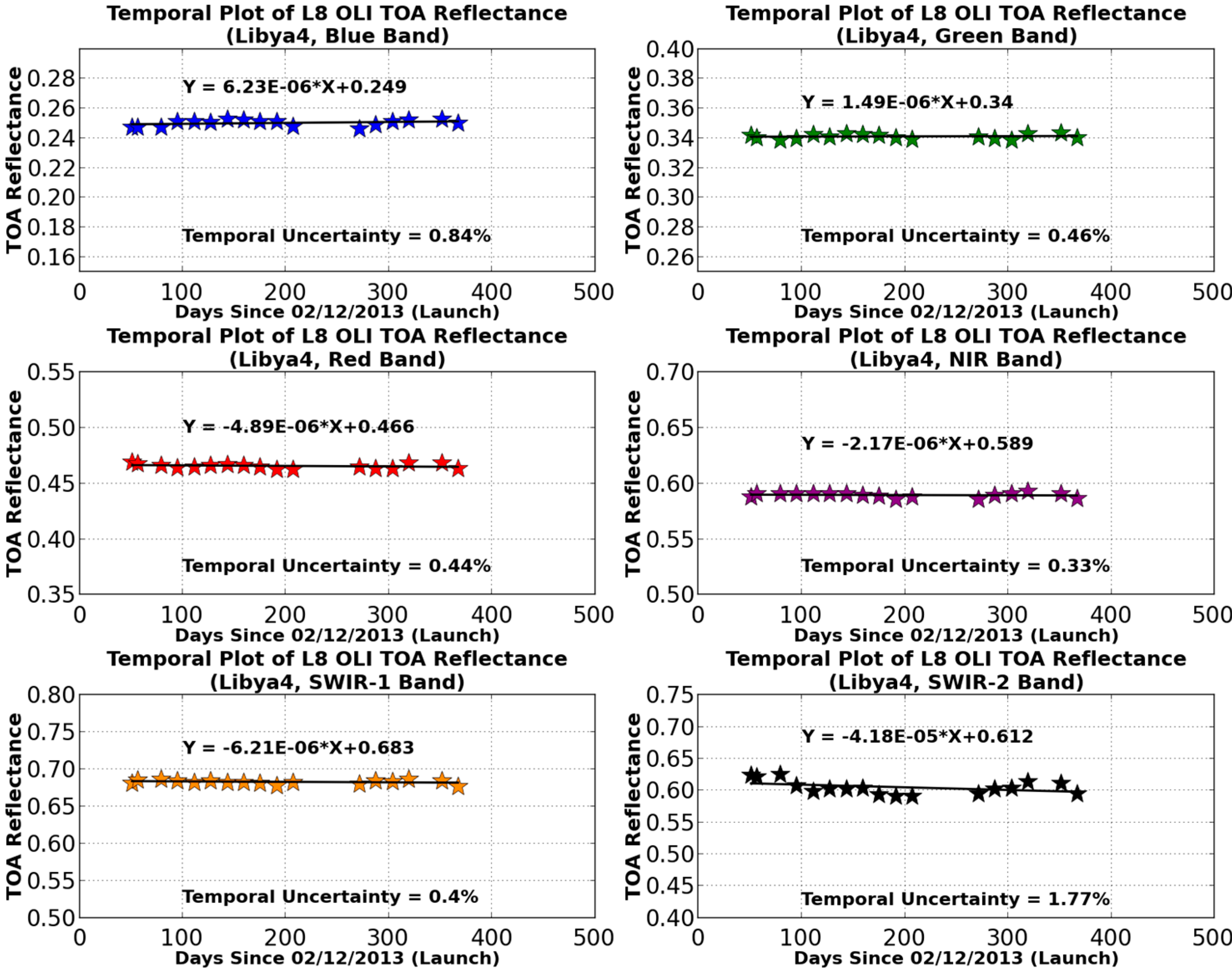
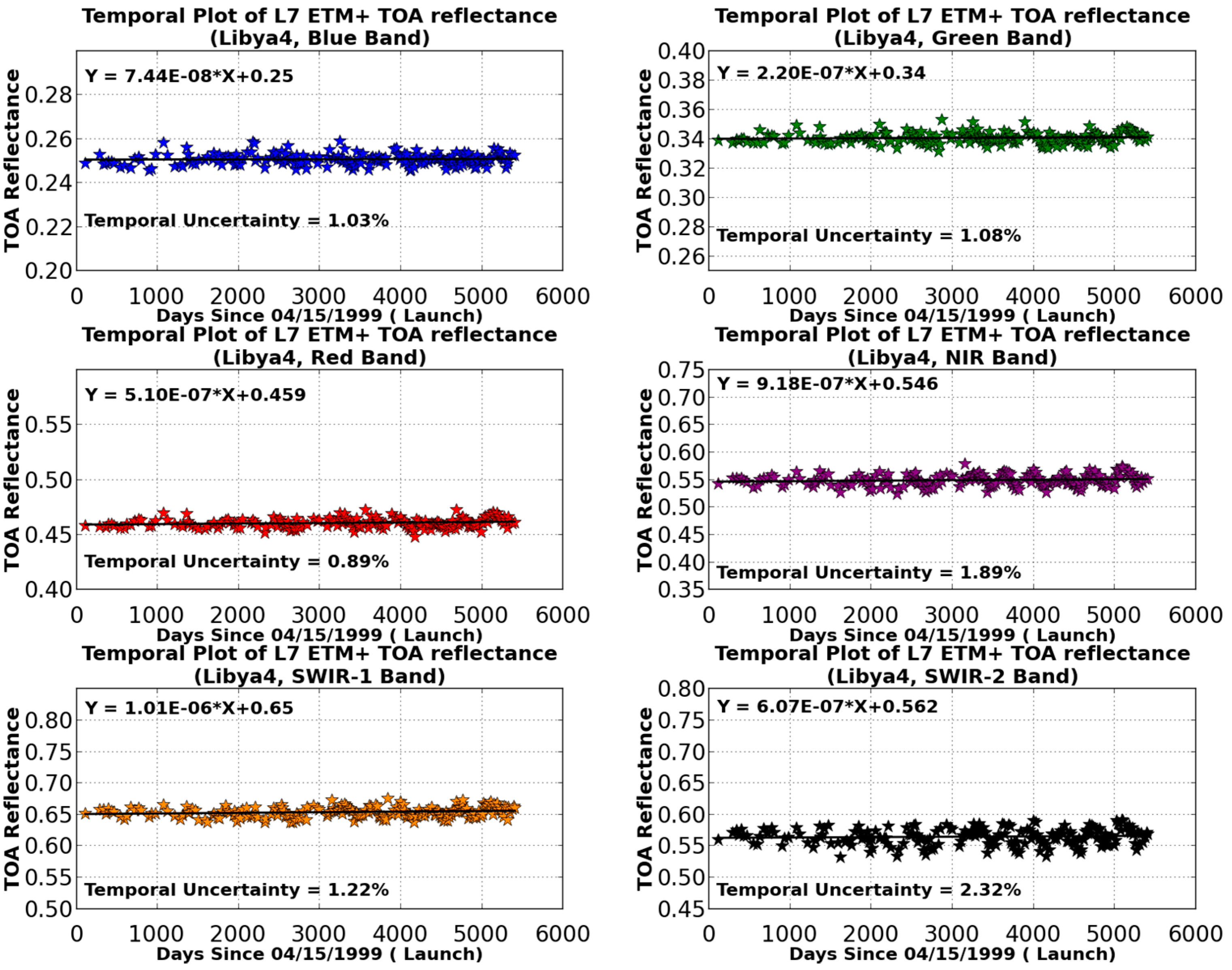
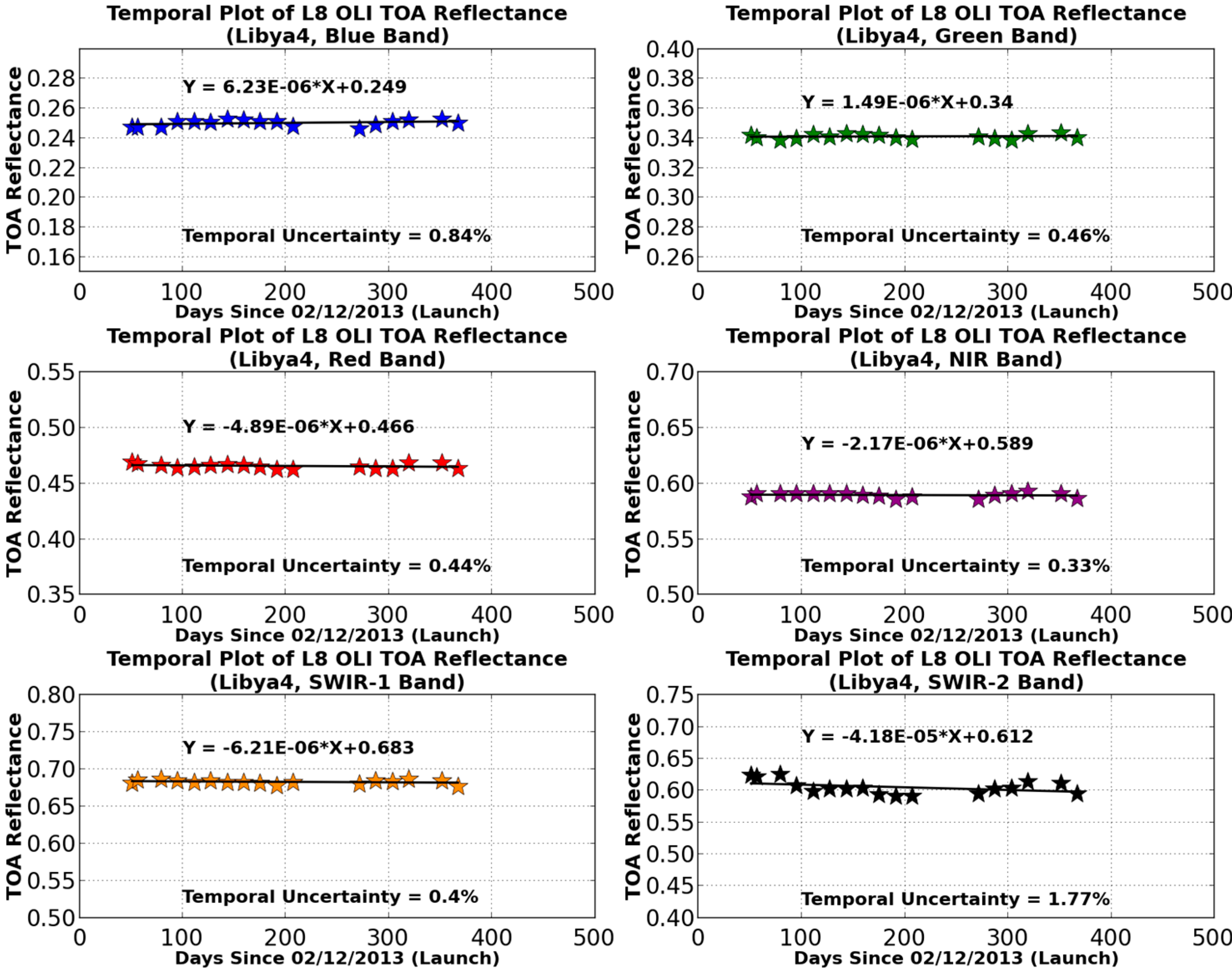
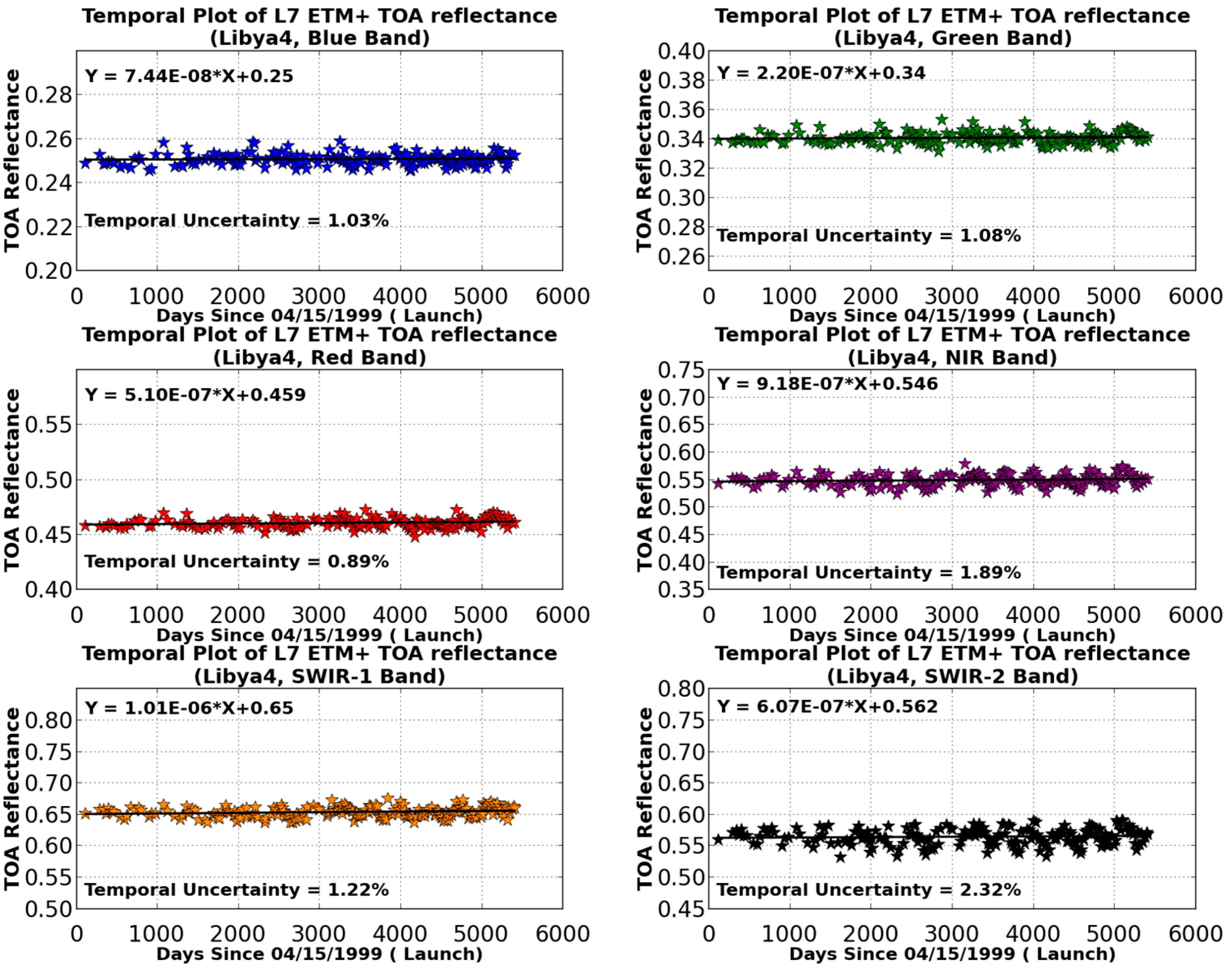
The PICS approach relies on the long-term stability of the site, and does not require simultaneity. The Libya 4 PICS was chosen for this calibration study as investigations have indicated that the site has been stable to within 2% for the last decade [
22,
28]. ETM+ has made over 200 nadir cloud-free acquisitions over Libya 4 since its launch in 1999. Similarly OLI has acquired more than 20 cloud-free images since its launch.
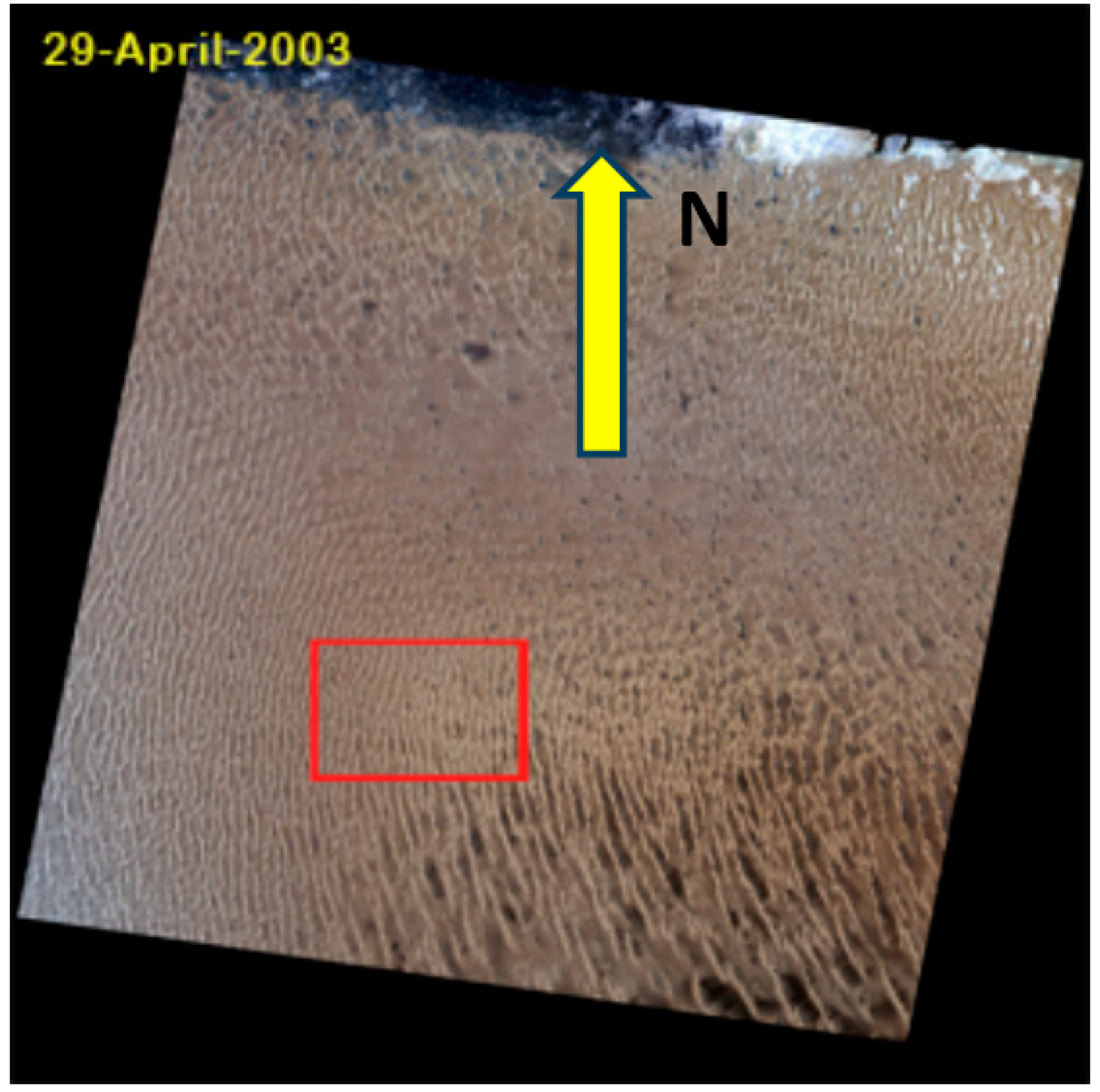
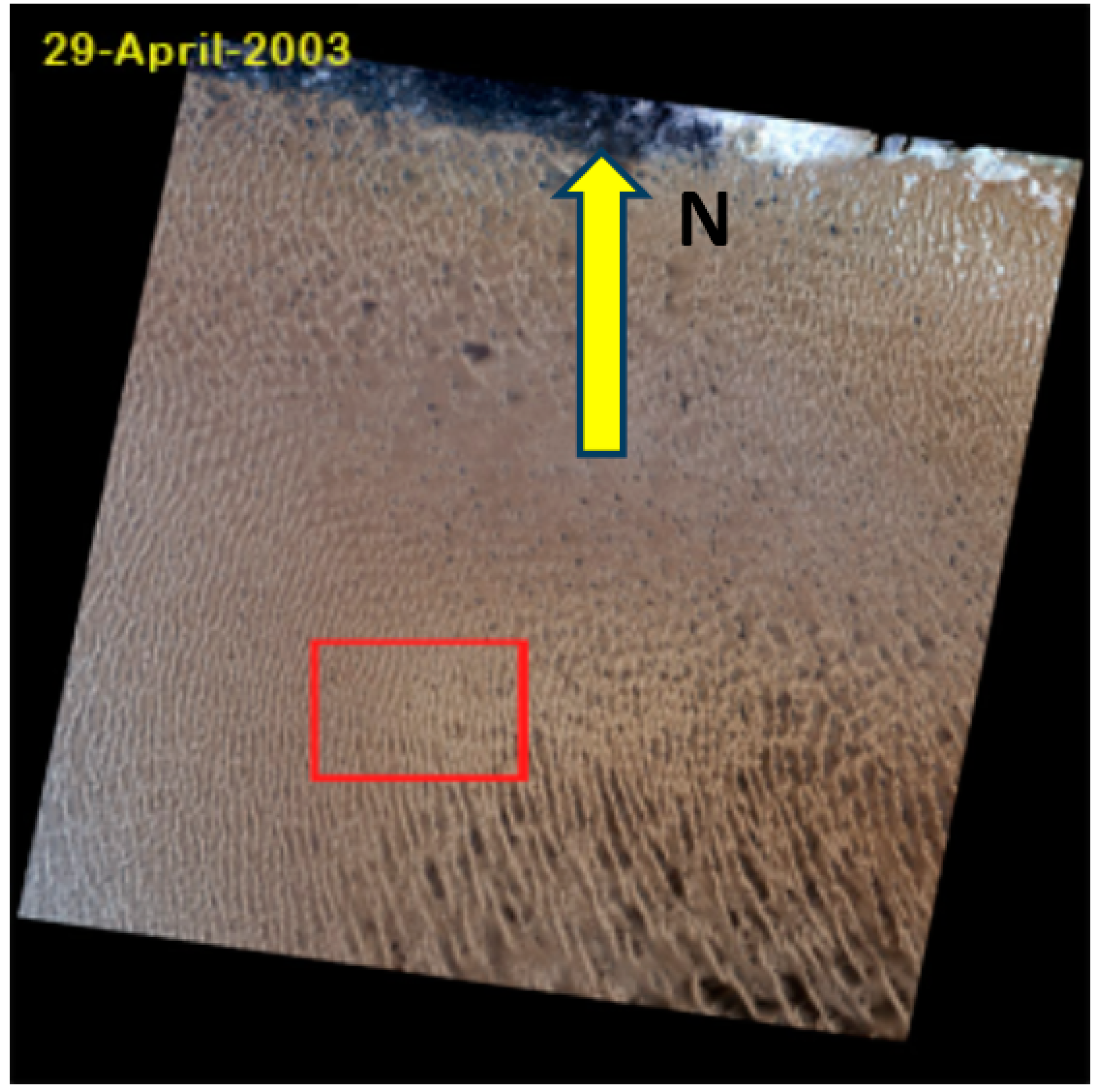
Figure 4 shows a RGB color composite Landsat image over Libya 4 PICS. The red rectangle shows the region of interest (ROI) which is about 45 × 28 km
2 [
14]. ETM+ and OLI image TOA reflectance over the ROI were calculated using the Landsat Image Assessment (IAS) PICS database. EO-1 Hyperion images were available in the USGS EarthExplorer database. It should be noted that historically Landsat calibration has been always based on the MODerate resolution atmospheric TRANsmission (MODTRAN) based ChKur solar model [
25]. Hence for consistency, the same ChKur model is used for converting at-sensor radiance to TOA reflectance for both the ETM+ and the Hyperion sensors.
Figure 4.
Landsat 7 ETM+ image over Libya 4. The red rectangle in the bottom images marks the chosen region of interest (ROI) with latitude (min and max): 28.45, 28.64, longitude (min and max): 23.29, 23.4.
Figure 4.
Landsat 7 ETM+ image over Libya 4. The red rectangle in the bottom images marks the chosen region of interest (ROI) with latitude (min and max): 28.45, 28.64, longitude (min and max): 23.29, 23.4.
3.2. Spectral Band Adjustment Factor (SBAF)
EO-1 Hyperion images, available in the USGS EarthExplorer database, were used to derive the spectral band adjustment factor (SBAF) to compensate for the RSR differences between the sensors. Although SBAF is discussed briefly in this section, the readers are directed elsewhere for the related mathematical expressions for SBAF [
17,
19,
29]. The suitability of Hyperion for the assessment of spectral band differences has been addressed in the literature [
19,
30].
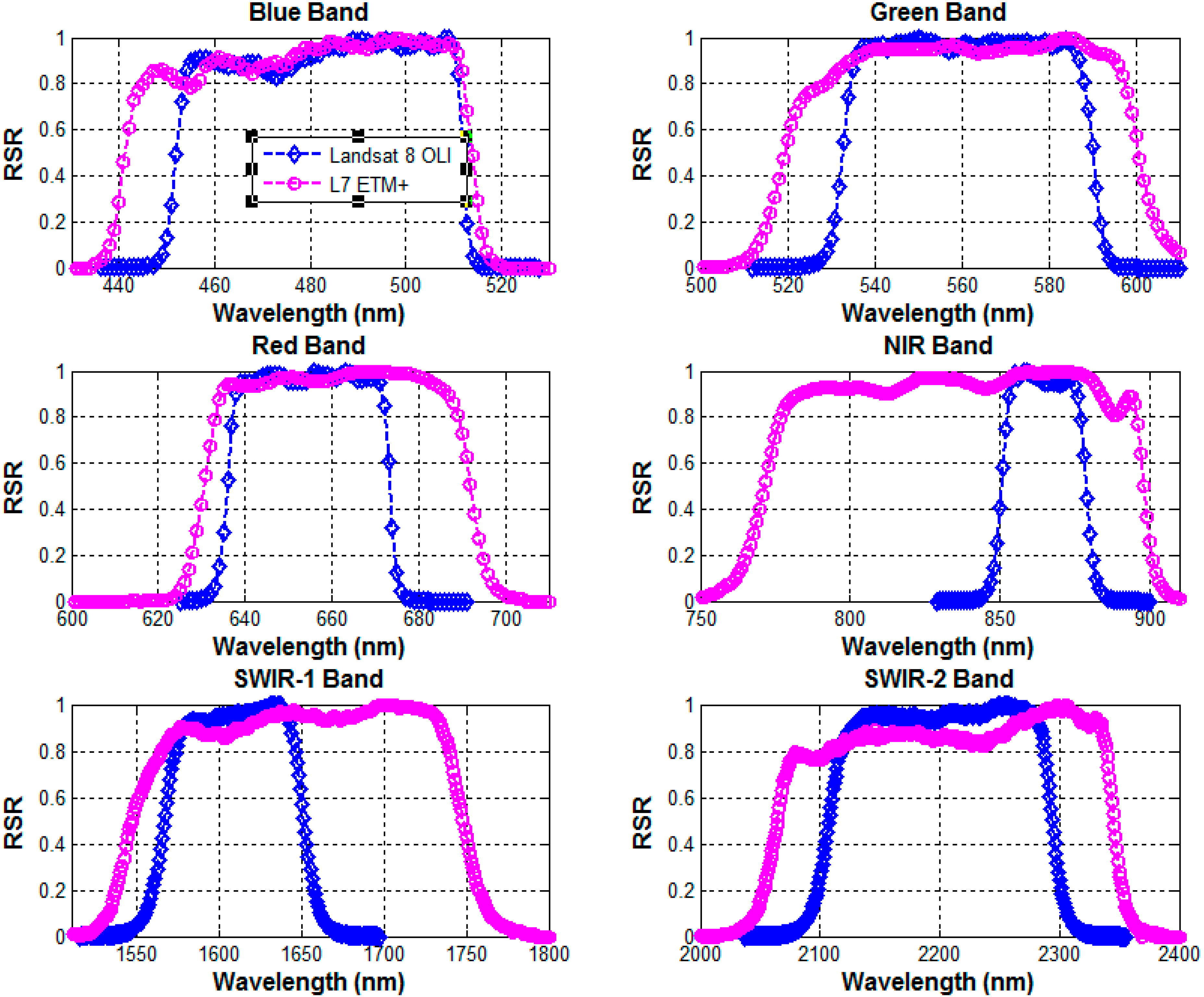
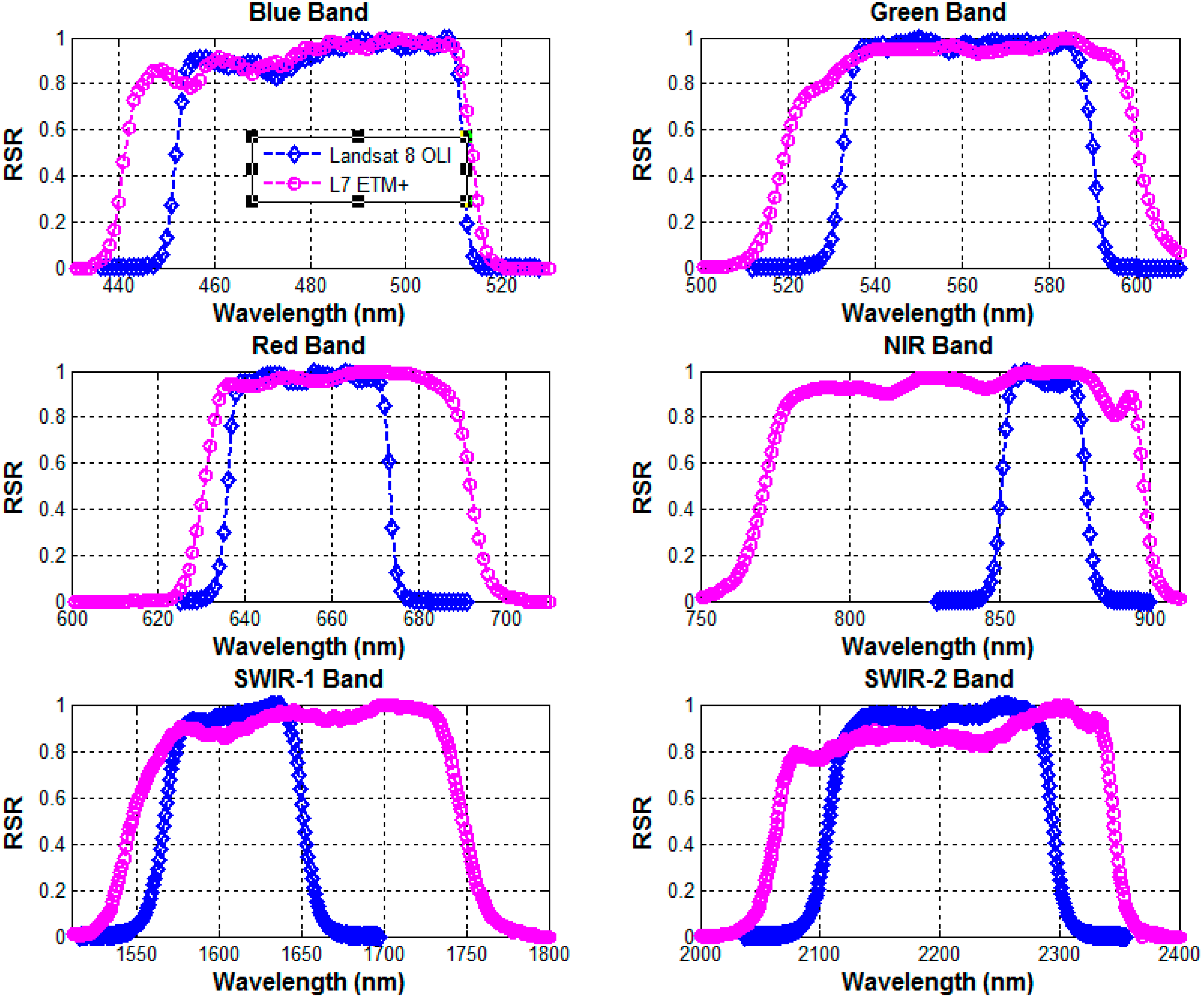
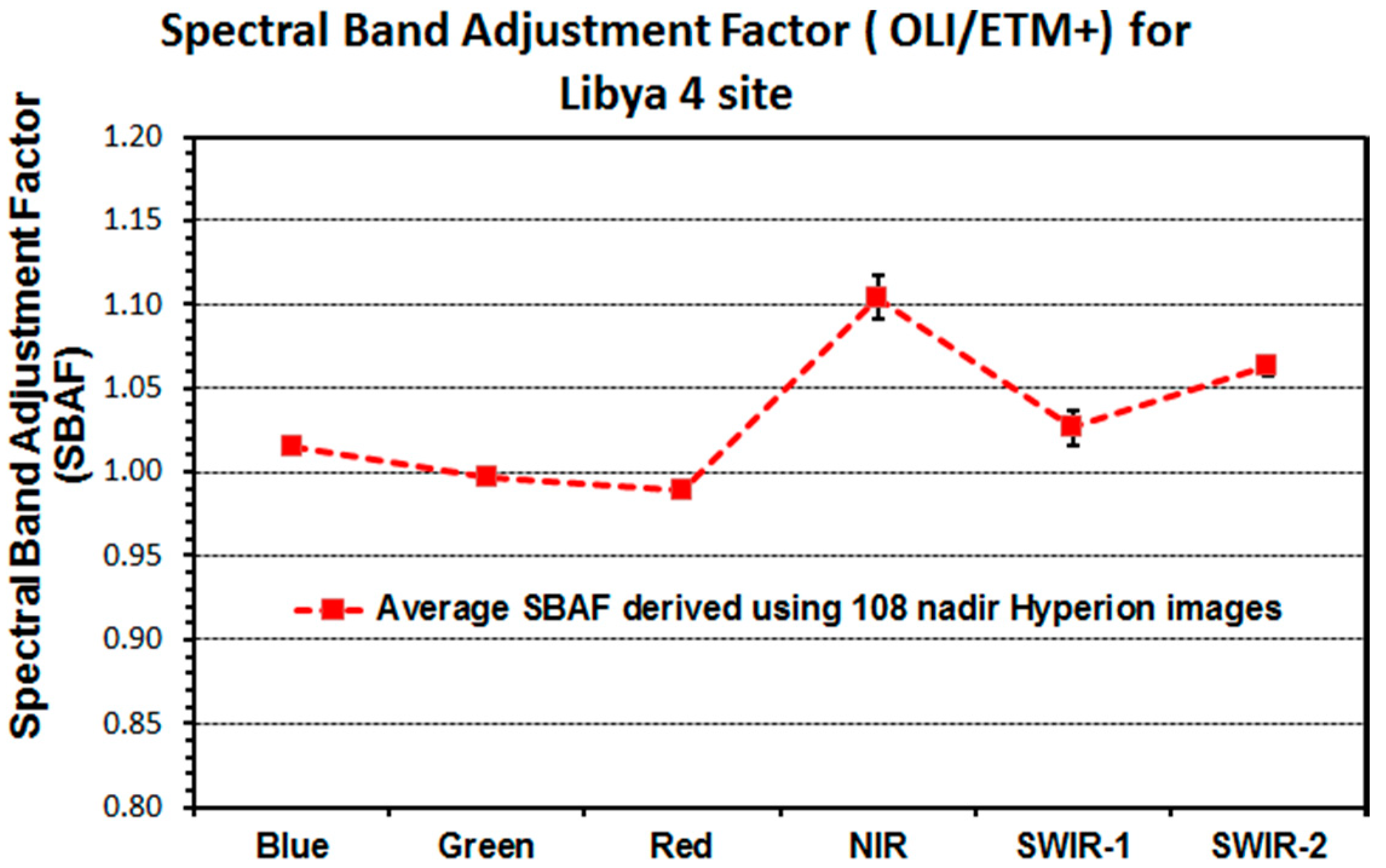
Figure 5 shows the SBAF derived for the OLI-ETM+ analogous band pairs using 108 nadir Hyperion TOA reflectance images over the Libya 4 site. Error bars (uncertainties) indicate 1 sigma standard deviation from the mean. The uncertainties are higher in the NIR and SWIR-1 bands as the spectral bandpasses of the two sensors differ the most for these bands. Nevertheless, uncertainties are ~1% for the NIR and SWIR-1 bands, while for the remaining bands the uncertainties are <0.5%. Departure from unity is an indication of in-band differences between the two sensors in that they respond differently for the same electromagnetic source. If this is not accounted for, there will be a systematic error in the cross calibration [
29,
30,
31]. SBAF plots shown in
Figure 5 indicate that for ETM+ and OLI band combination, the largest difference is 6%–10% in the NIR and SWIR-2 bands whereas difference of 1%–4% can be expected in the other bands when imaging a bright desert.
Figure 5.
Spectral band adjustment Factor (SBAF) for Libya 4 test site.
Figure 5.
Spectral band adjustment Factor (SBAF) for Libya 4 test site.
5. Discussion on Atmospheric Uncertainties
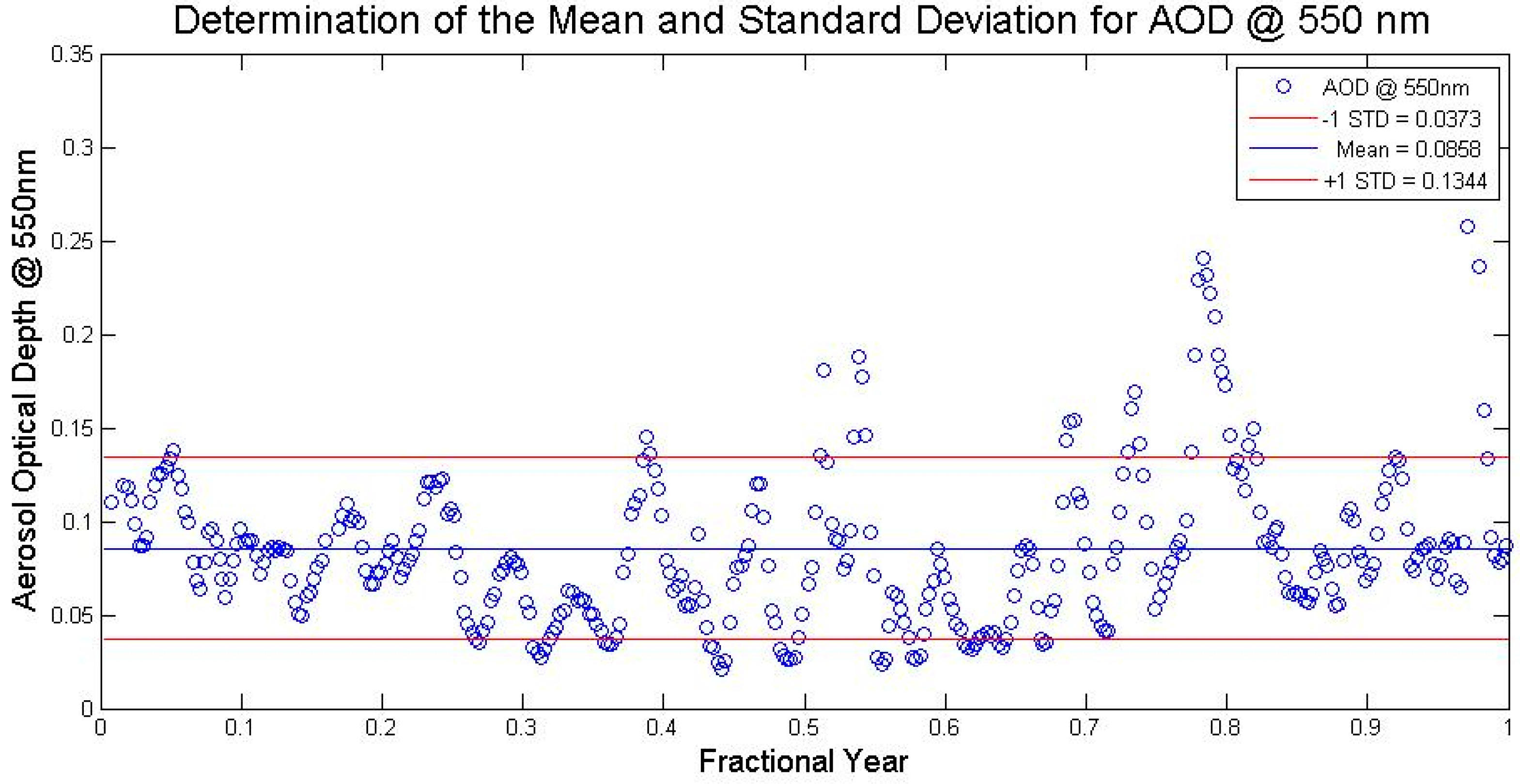
When doing cross-calibration work between two sensors, there is always uncertainty in the correction for the differing RSR-induced effects of the atmosphere. In this section, an attempt is made to quantify the uncertainties due to the atmospheric conditions at the time of overpass between ETM+ and OLI. Two different cases are presented in this section. For both cases the “SBAF compensation” is a fixed value based on a mean computed across a multitude of atmospheric conditions. Case 1 represents an ideal case, where the satellites fly over on the same day with the same atmospheric conditions. In Case 2 the satellites come over on different days with potentially different atmospheric loadings. The atmospheric parameters were determined by looking at SDSU’s Modtran Atmospheric Correction Anytime Anywhere (SMACAA) database for Libya 4 over the course of a year—specifically 2013. This database is a compilation of numerous data sources including spaceborne and ground measurements, used to generate a 40+ year history of atmospheric loadings for the purpose of understanding how the atmospheric optical properties impacts imaging platforms, and how to correct for this impact. From the database, the mean value and ± one standard deviation for each atmospheric value was determined.
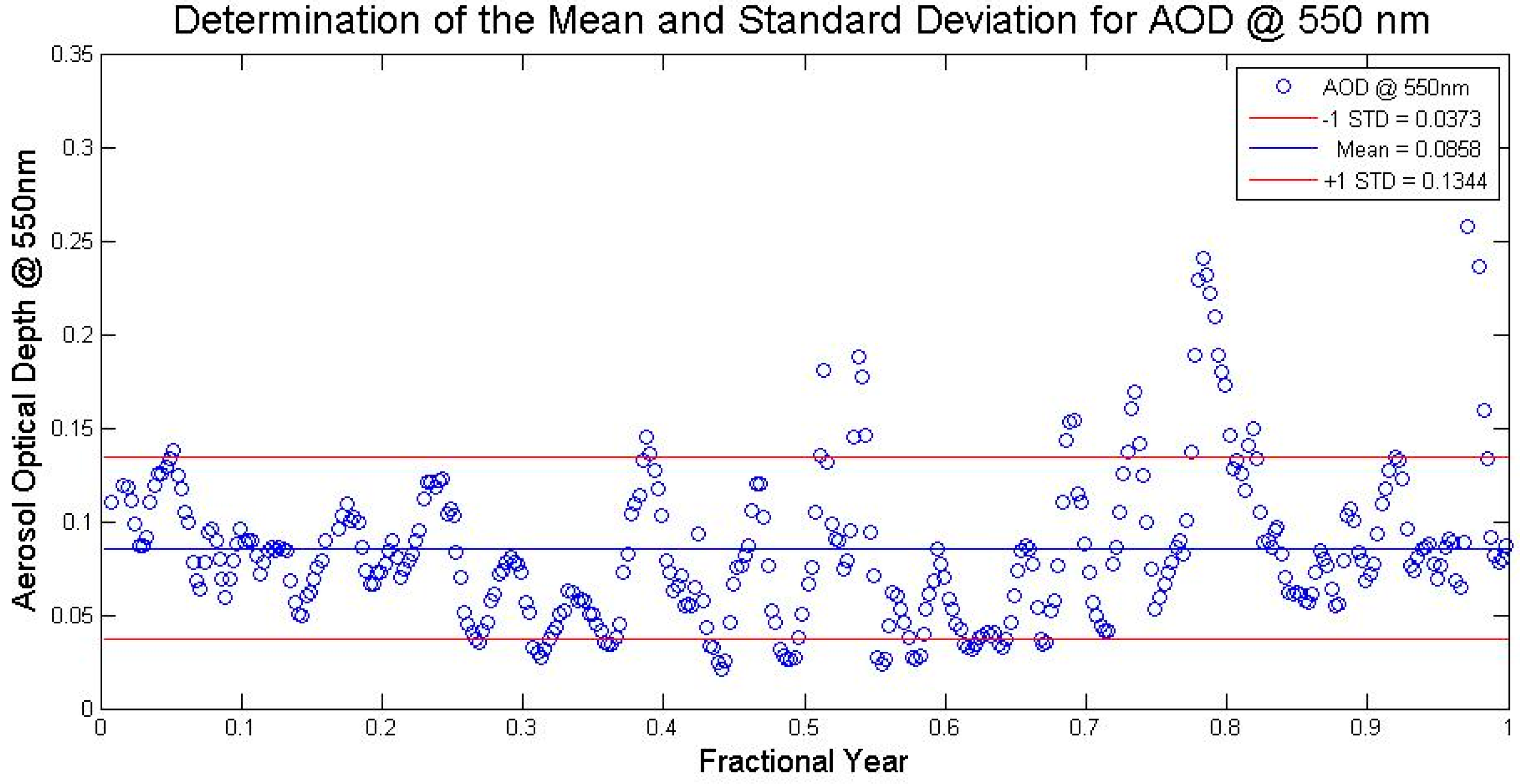
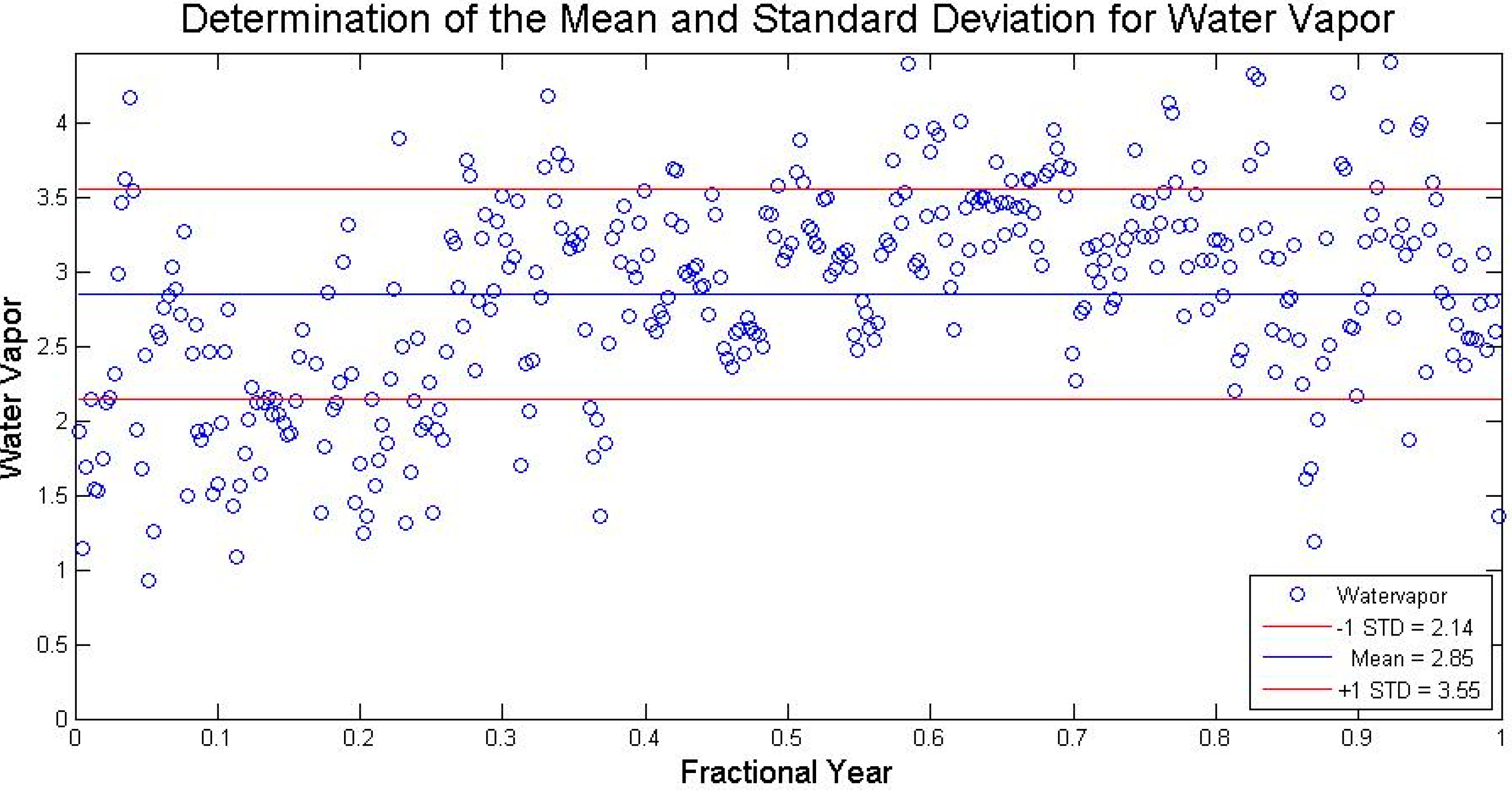
Figure 11 shows the aerosol loading over Libya 4 for 2013, along with the calculated mean and +/− one standard deviation levels. These three values are used in the simulations to determine the impact of aerosol on the cross calibration of the two sensors. The mean Aerosol Optical Depth (AOD) for Libya 4 for 2013 is 0.11 with a standard deviation of ±0.06. Similarly, an evaluation of water vapor was performed, and is shown in
Figure 12. The results show that the mean columnar water vapor over the Libya 4 test site is 2.8 g/cm
2, with a standard deviation of ±0.7 g/cm
2.
Figure 11.
Aerosol levels over the Libya 4 test site.
Figure 11.
Aerosol levels over the Libya 4 test site.
Figure 12.
Water vapor levels over the Libya 4 site.
Figure 12.
Water vapor levels over the Libya 4 site.
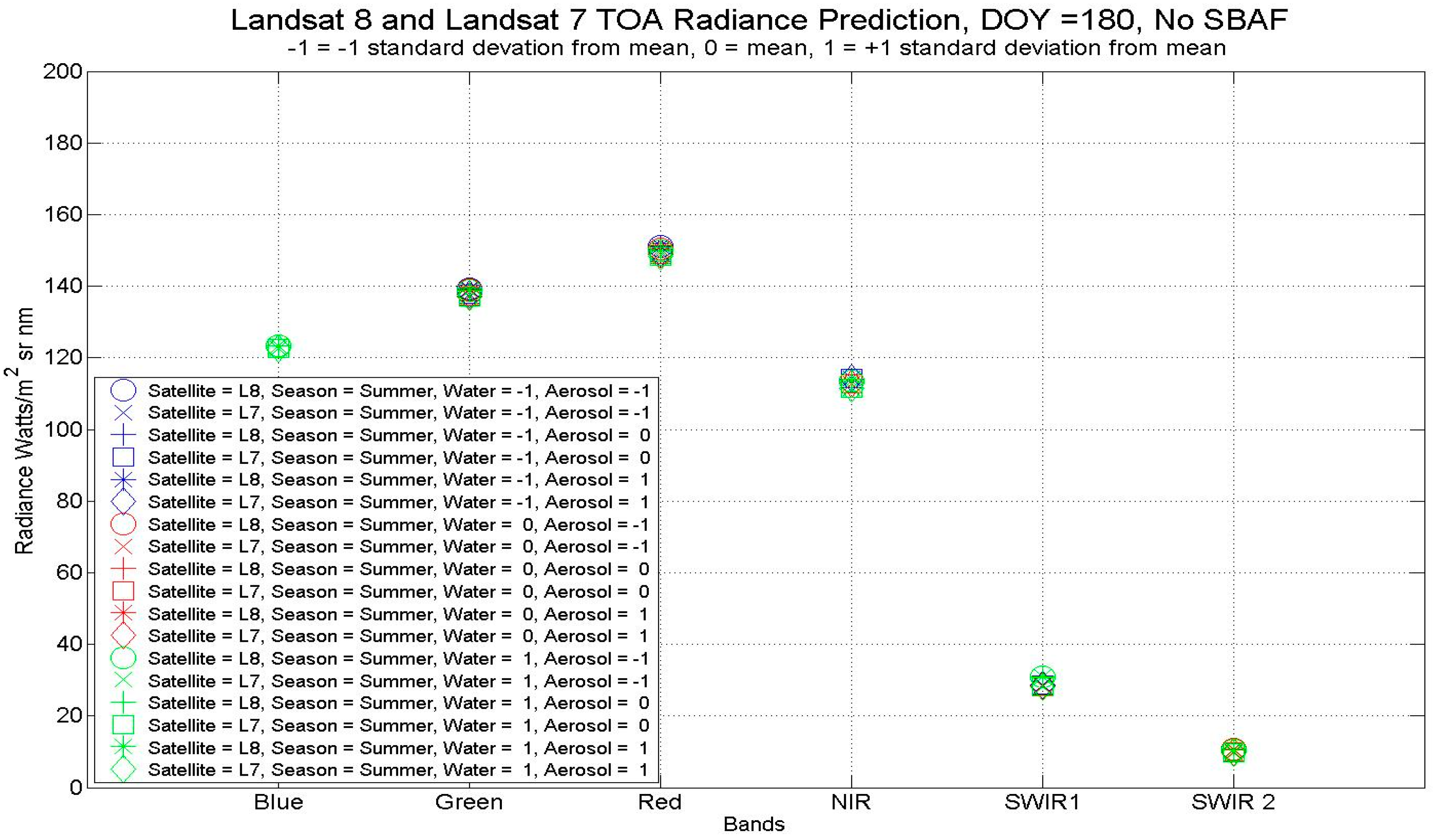
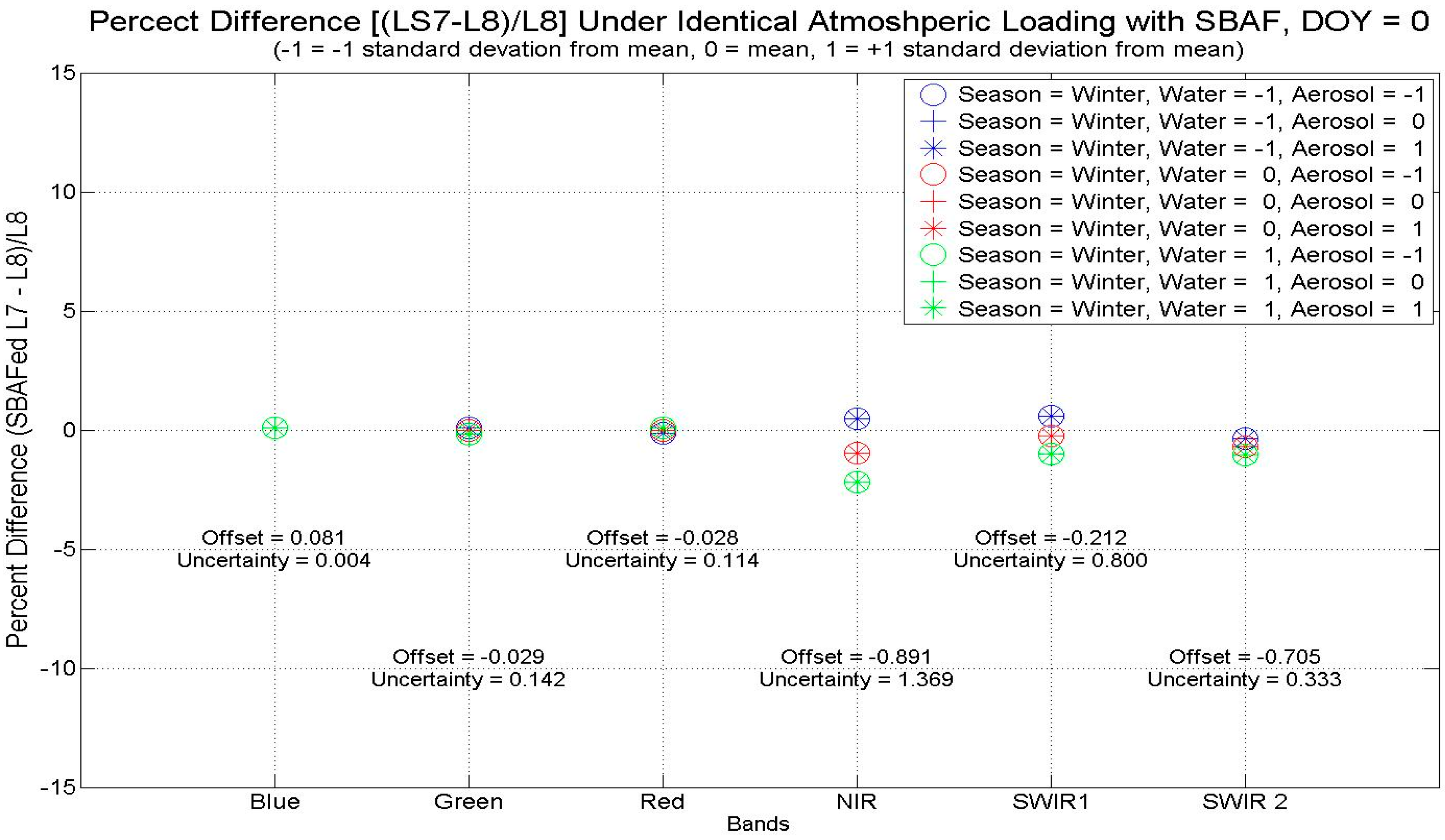
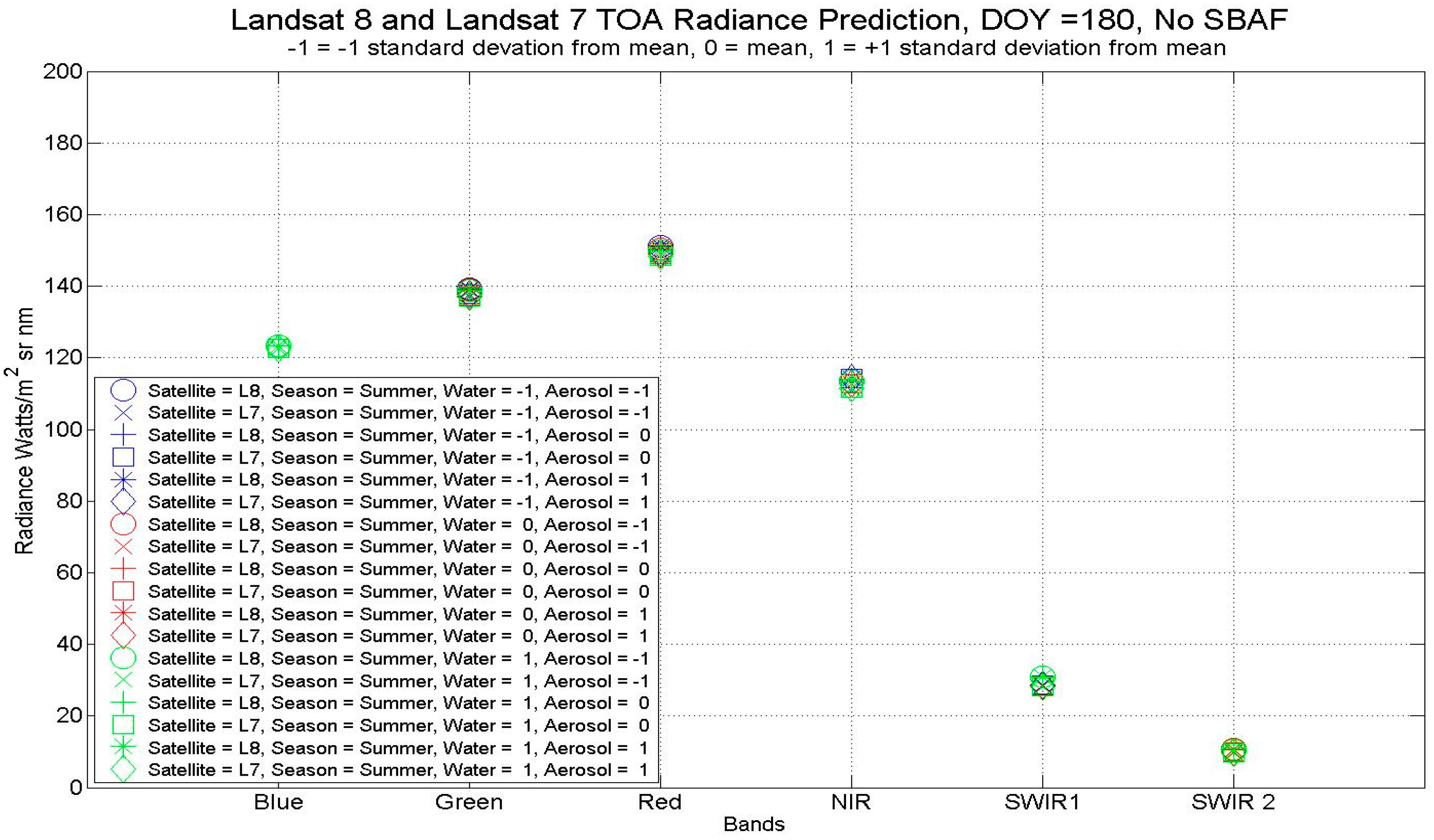
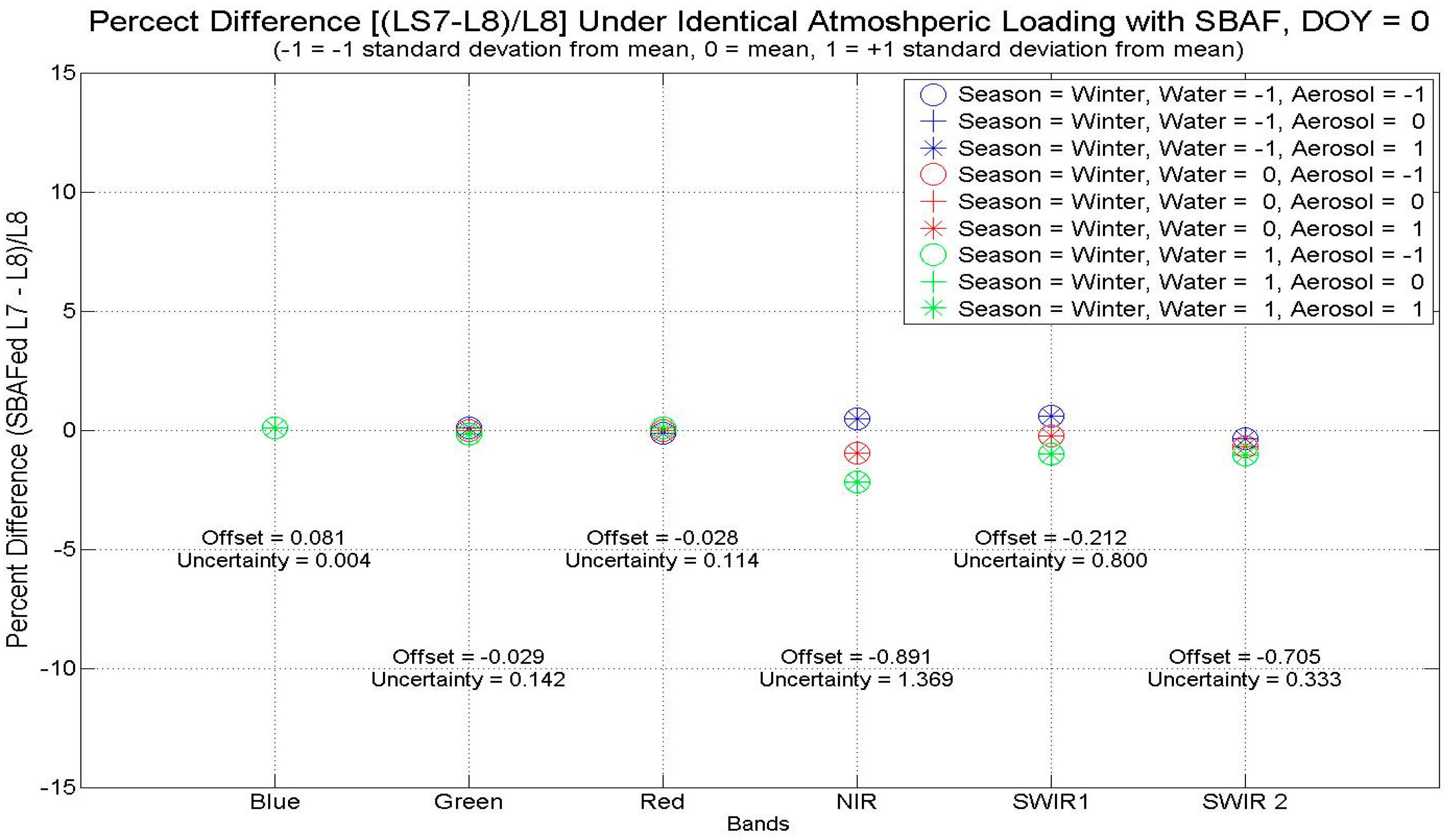
For Case 1, all combinations of mean, plus one standard deviation, and minus one standard deviation for water vapor and aerosol are simulated. This simulation produces nine different atmospheric loading conditions for the top of atmosphere predictions for the two sensors, in this case Landsat 7 and 8. Case 1 simulates the acquisition of both sensors simultaneously over the test site. The case was simulated for a summer date since the atmosphere has seasonal loading patterns. The results of those simulations can be seen in
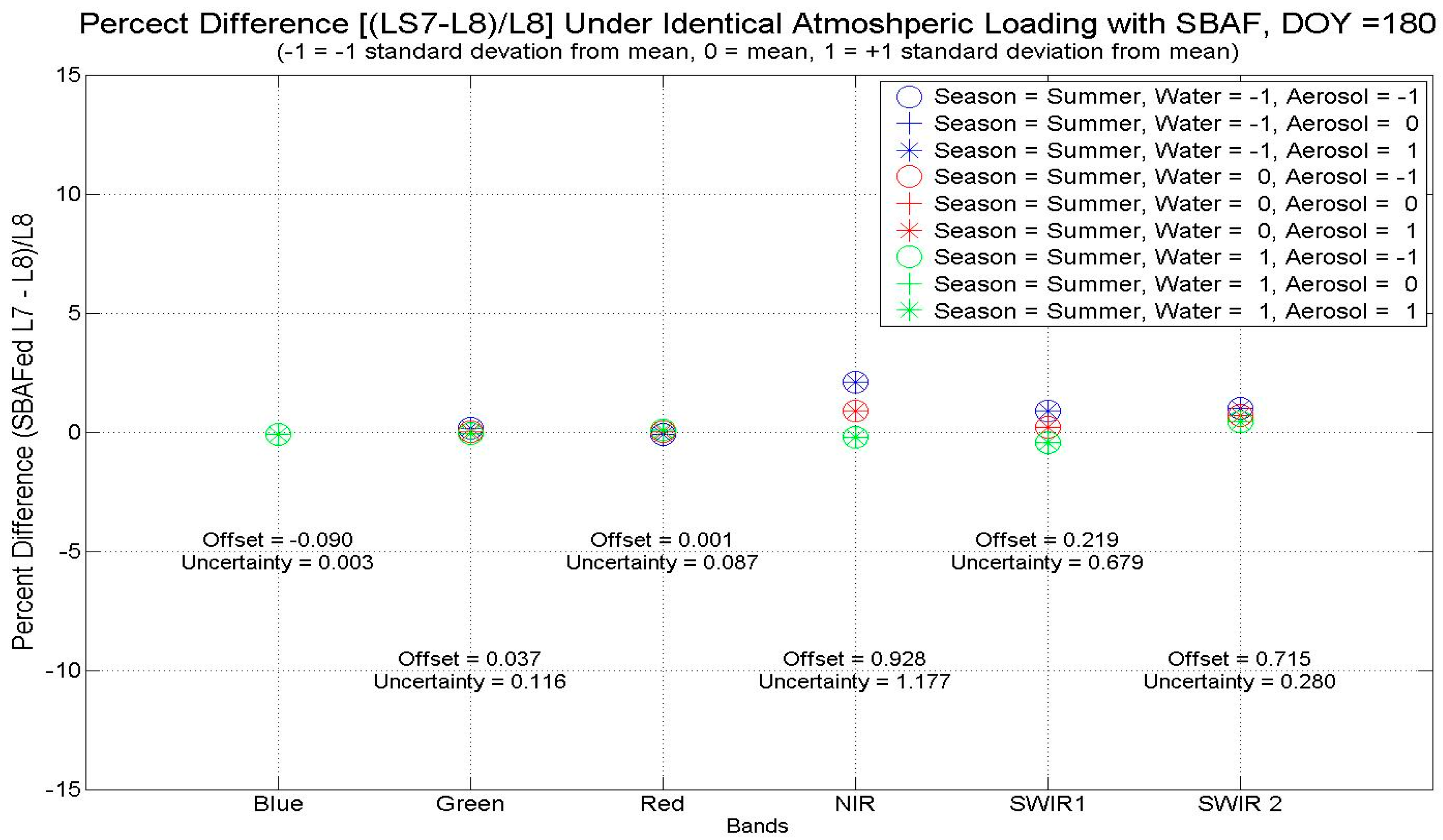
Figure 13 where all 9 scenarios are plotted for both Landsat 7 and 8. After that an atmospherically independent SBAF is applied and the percent difference between the sensors is plotted for the 9 different cases in
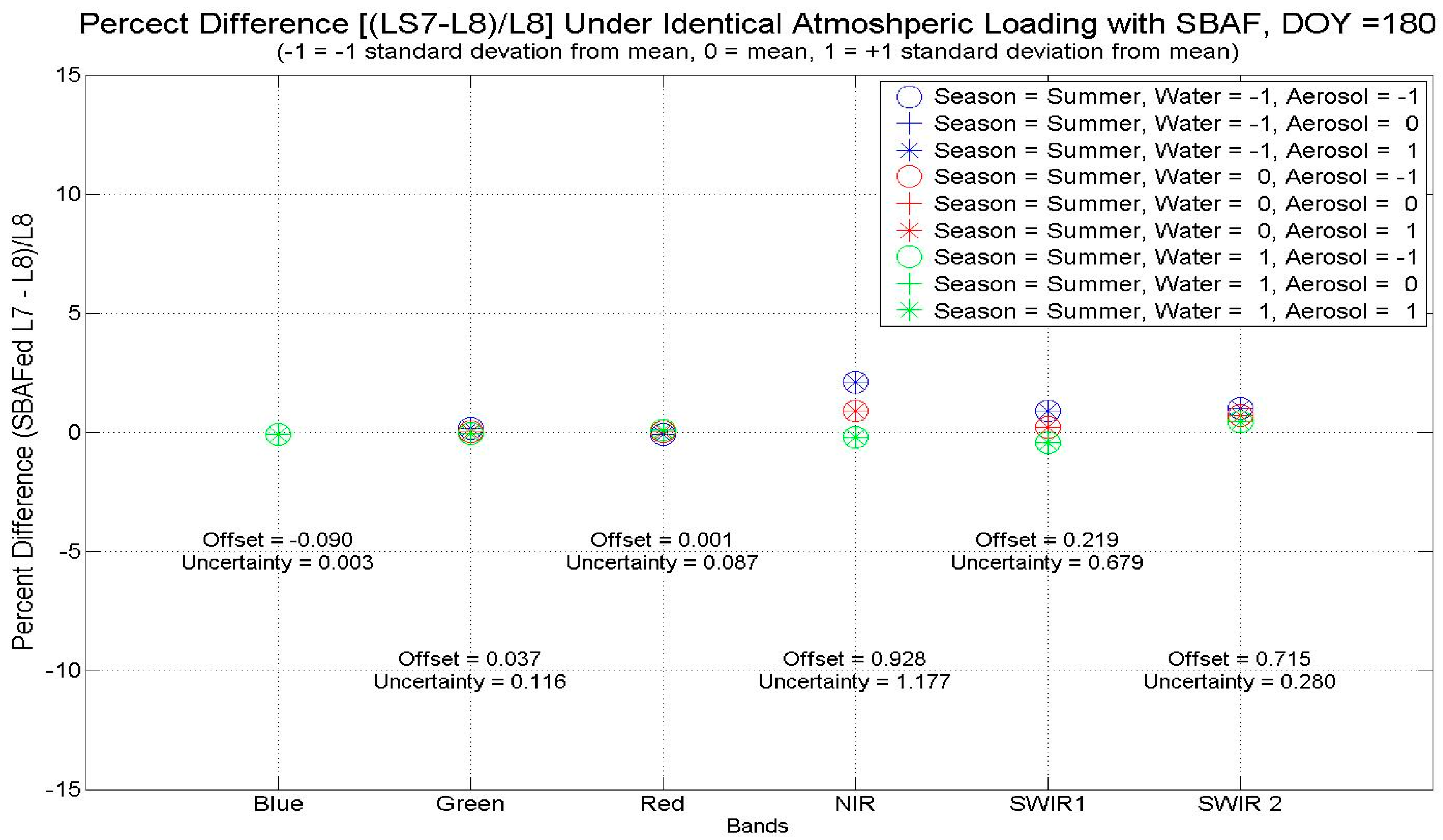
Figure 14 and
Figure 15; this provides the percentage difference between ETM+ and OLI for summer and winter respectively. We can observe that a minor offset exists between the two sensors across the bands. This offset is due to the fact the SBAF correction was calculated as a generic year averaged SBAF and is not date specific. Ideally a SBAF should be calculated for each individual scene pair because on any given date the TOA spectral profile is influenced by sun and satellite view geometry and the atmospheric conditions. The bias is a small concern at this point; the spread in the points the bigger concern and as it represents the uncertainty to each band due to atmospheric effects. Looking at the graphs, the effect of various aerosol loadings on cross calibration is negligible at the shorter wavelengths, as indicated by the uncertainties. The results are summarized in
Table 3 which shows that if ETM+ and OLI were to image the target at the same time through the same atmosphere, the uncertainties due to varying atmosphere loading differences would be less than 1%, except for the NIR bands because of the reasons alluded to in the earlier section.
Figure 13.
Radiance levels predicted for the Libya 4 test site.
Figure 13.
Radiance levels predicted for the Libya 4 test site.
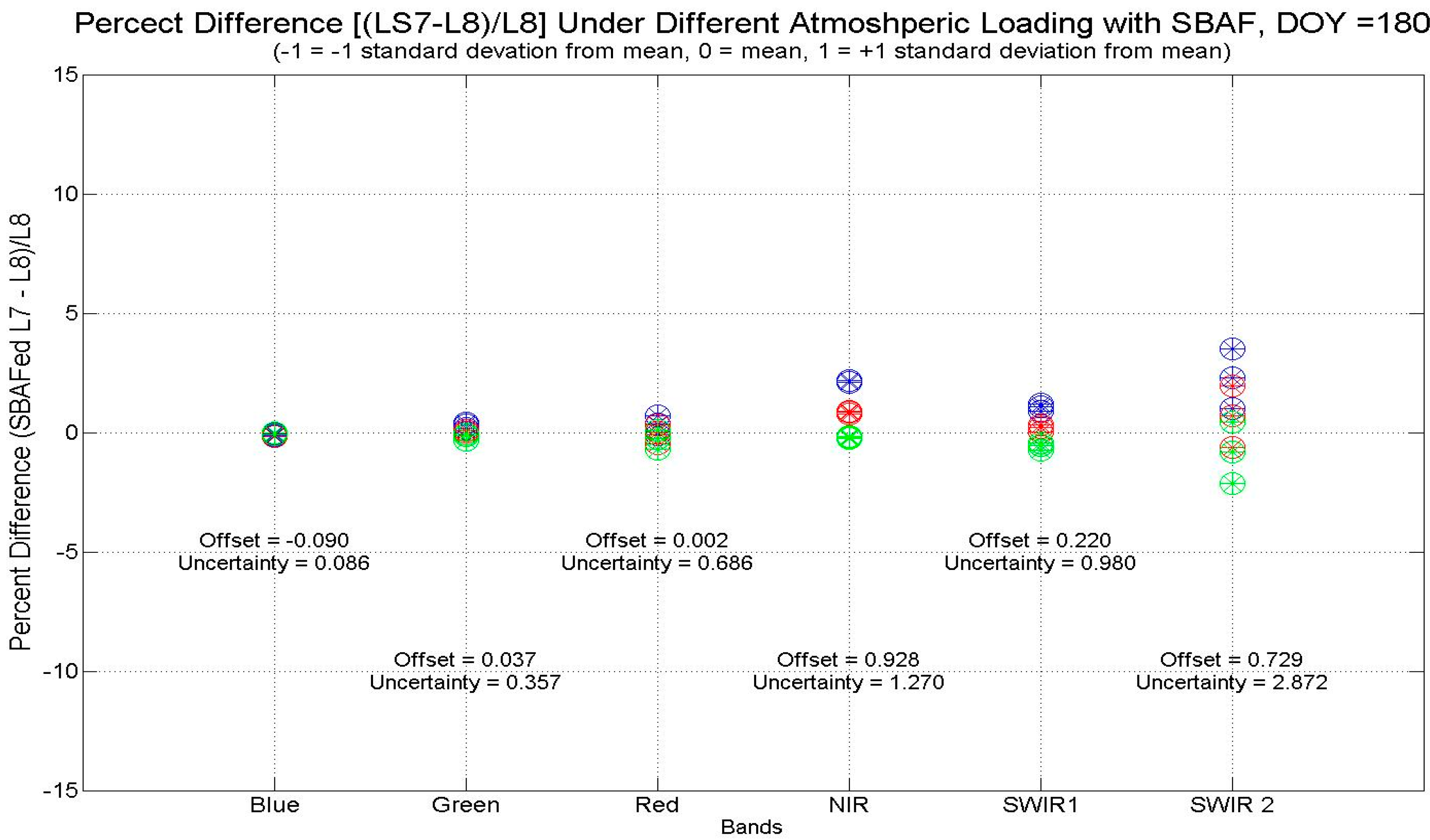
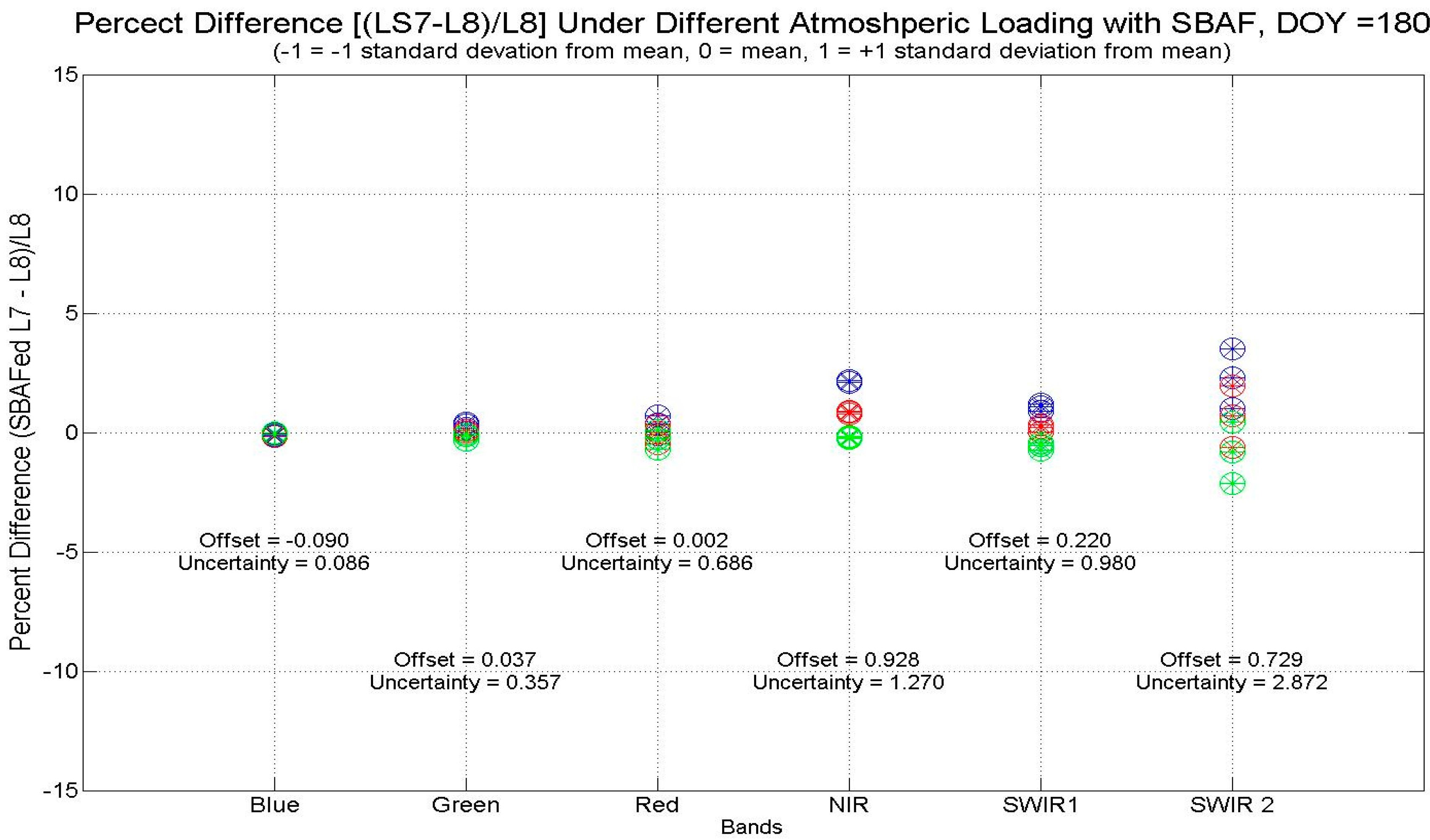
As stated earlier, Landsat 7 and 8 are off cycle by 8 days; this offset leaves the possibility for large fronts to come over, and cause dramatic changes to the atmospheric makeup. So now consider the 9 previous versions of atmospheric loadings, and compare all possible combinations. For every unique loading of the atmosphere it’s compared to the other 9 version (9 × 9) which produce 81 cases. Results of this evaluation are shown in
Figure 16. As before the very minor bias is due to the fact that a generic SBAF correction was applied. The spread in the analysis is the more important feature here, and represents the effect of various atmospheric loadings as it applies to cross calibration. As was seen in
Figure 15, the effect of aerosol loading has a minimal impact, while the water vapor loading effect is much more pronounced in the NIR and SWIR bands, particularly in the SWIR 2 band. Similarly
Figure 16 shows the percentage difference between L7 and L8 for non-coincident looks in the summer months.
Figure 14.
Percent difference between L7 and L8 coincident looks—Summer.
Figure 14.
Percent difference between L7 and L8 coincident looks—Summer.
Figure 15.
Percent difference between L7 and L8 coincident looks—Winter.
Figure 15.
Percent difference between L7 and L8 coincident looks—Winter.
Table 3.
Atmospheric uncertainty for same day coincident cross calibration over Libya 4.
Table 3.
Atmospheric uncertainty for same day coincident cross calibration over Libya 4.
| | Blue | Green | Red | NIR | SWIR1 | SWIR2 |
|---|
| Summer | 0.003% | 0.116% | 0.087% | 1.177% | 0.679% | 0.280% |
| Winter | 0.004% | 0.142% | 0.114% | 1.369% | 0.800% | 0.333% |
Figure 16.
Percent difference between L7 and L8 non-coincident looks—Summer.
Figure 16.
Percent difference between L7 and L8 non-coincident looks—Summer.
Table 4 shows the results for the uncertainty that could be assigned to atmospheric loading for atmospheres varying between ± one standard deviation of the mean atmosphere for Libya 4. The results show great agreement for all but the SWIR 2, which approached the 3%–4% uncertainty level. This maximum level would represent a change in atmosphere water vapor levels changing from +1 STD “wet” to −1 STD “dry” over the course of 8 days or vice-versa. While this seems to be an extreme possibility based on
Figure 12, the likelihood of this occurrence is nonzero.
Table 4.
Atmospheric uncertainty for different day cross calibration over Libya 4.
Table 4.
Atmospheric uncertainty for different day cross calibration over Libya 4.
| | Blue | Green | Red | NIR | SWIR1 | SWIR2 |
|---|
| Summer | 0.086% | 0.357% | 0.686% | 1.270% | 0.980% | 2.872% |
| Winter | 0.118% | 0.440% | 0.865% | 1.493% | 1.204% | 3.513% |
6. Conclusions
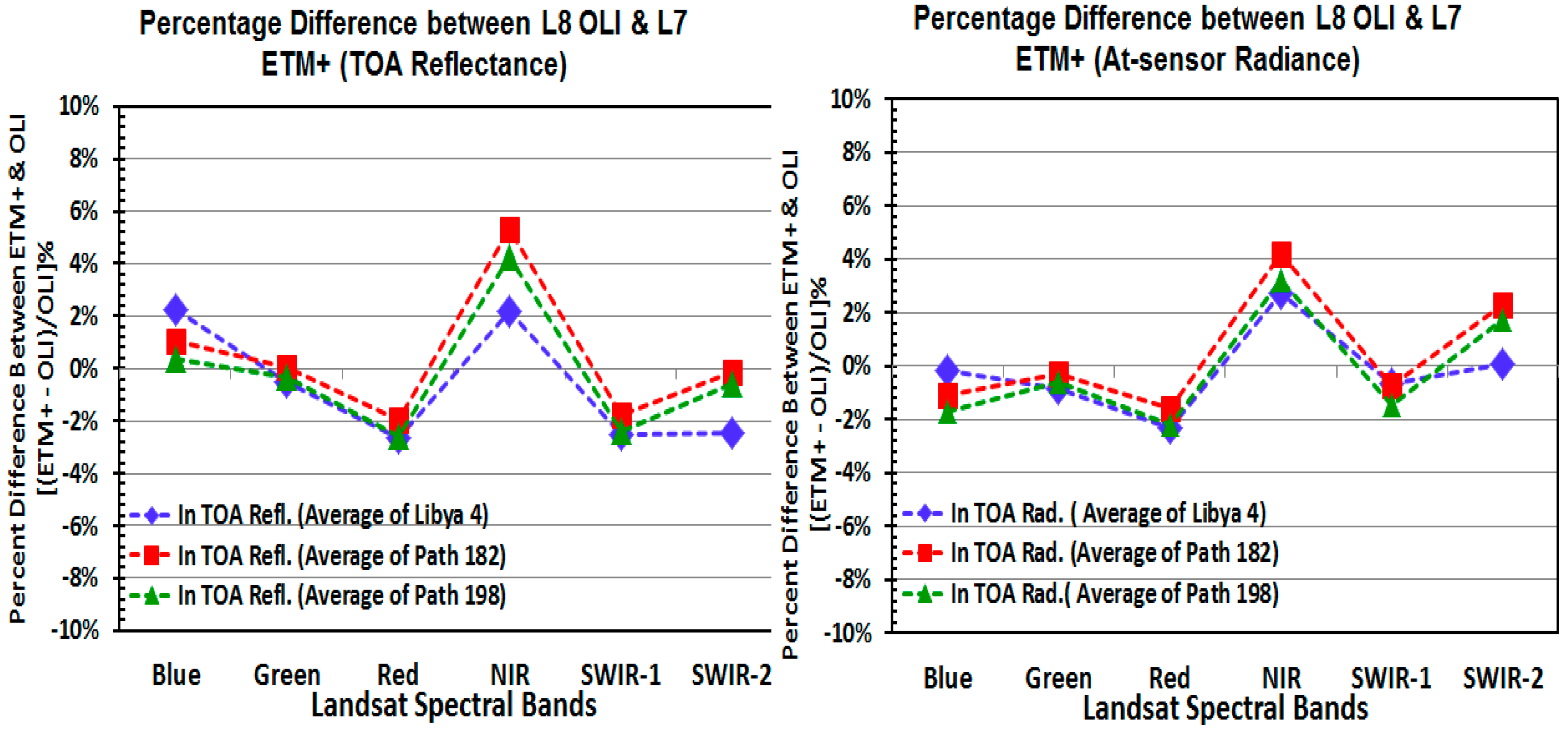
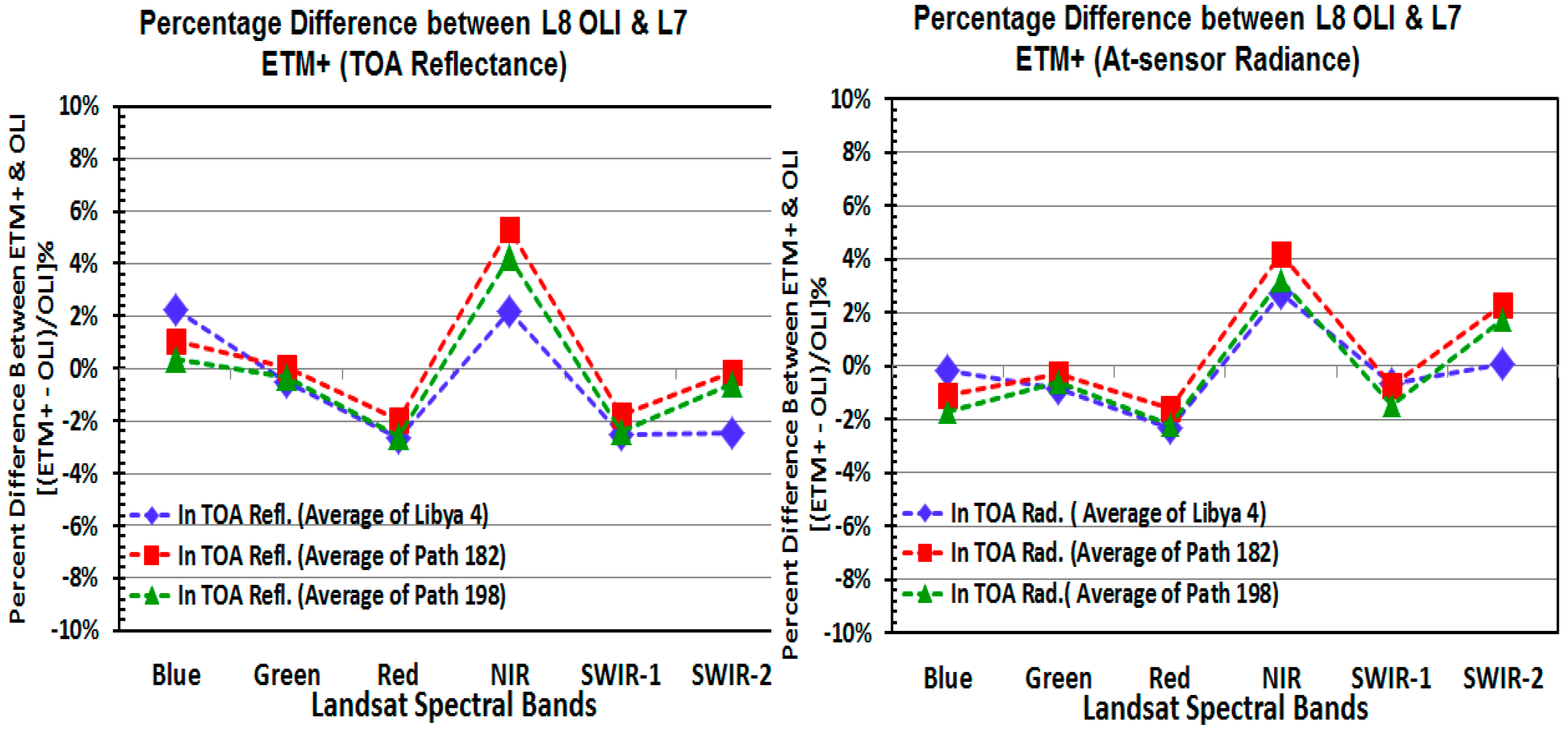
This article presents the results of early cross-calibration between the reflective bands of L8 OLI and L7 ETM+. This article describes a cross-calibration approach based on using time series statistics over the Libya 4 PICS location and using simultaneous collects from the two sensors during the underfly maneuver in March 2013. EO-1 Hyperion images were used to quantify the spectral signature of the applicable target area. Results show that, in general, OLI agrees to better than ±2.5% with ETM+ in both radiance and reflectance space. The deviation from this behavior is the NIR bands where differences approached 4% in both radiance and reflectance space. The radiance and reflectance-based cross-calibration results agreed to ±2%.
It should be noted that differences of 4% are within the ±5% radiance uncertainty requirement for OLI. Also, even in reflectance space, with OLI at ±3% and ETM+ at ±5%, the difference of 4% is within the joint error bars. Studies are on-going to make radiance and reflectance-based calibration more consistent. Therefore, the work presented not only provides a confidence in the radiometric calibration of OLI; it also shows a good radiometric compatibility of the OLI bands to ETM+. The remaining differences and the associated uncertainties can be further understood by knowledge of the intervening atmosphere at the time of overpass. This is especially important as multiple sites are being used for cross calibration and given the fact that the spectral bandpasses are dissimilar, the instruments respond somewhat differently to atmospheric absorption features such as water vapor absorptions. Atmospheric uncertainties due to overpass differences were deemed to be a major source of uncertainty, especially at longer wavelengths as analysis over Libya 4 PICS showed that a difference of 1%–4% can be expected depending on atmospheric conditions at the time of year and overpass. PICS-based calibration has been vital to the general calibration/validation strategy of the Landsat instruments. As more images become available in the archive, the Calibration Validation Team (CVT) at NASA Goddard Space Flight Center (GSFC), the USGS Earth Resources Observation and Science (EROS) Center and SDSU will continue to monitor OLI trending over PICS and this will provide an independent means (other than onboard calibrators) to monitor the stability of the OLI instrument. Future work also includes using PICS-based inter-calibration approaches to validate all the Landsat sensors (Landsat 1–Landsat 8) with respect to a consistent radiometric scale. This work will be done, first in terms of relative calibration and then by absolute calibration.

 ,
, 

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}