Landsat-8 Thermal Infrared Sensor (TIRS) Vicarious Radiometric Calibration

Abstract
:
1. Introduction
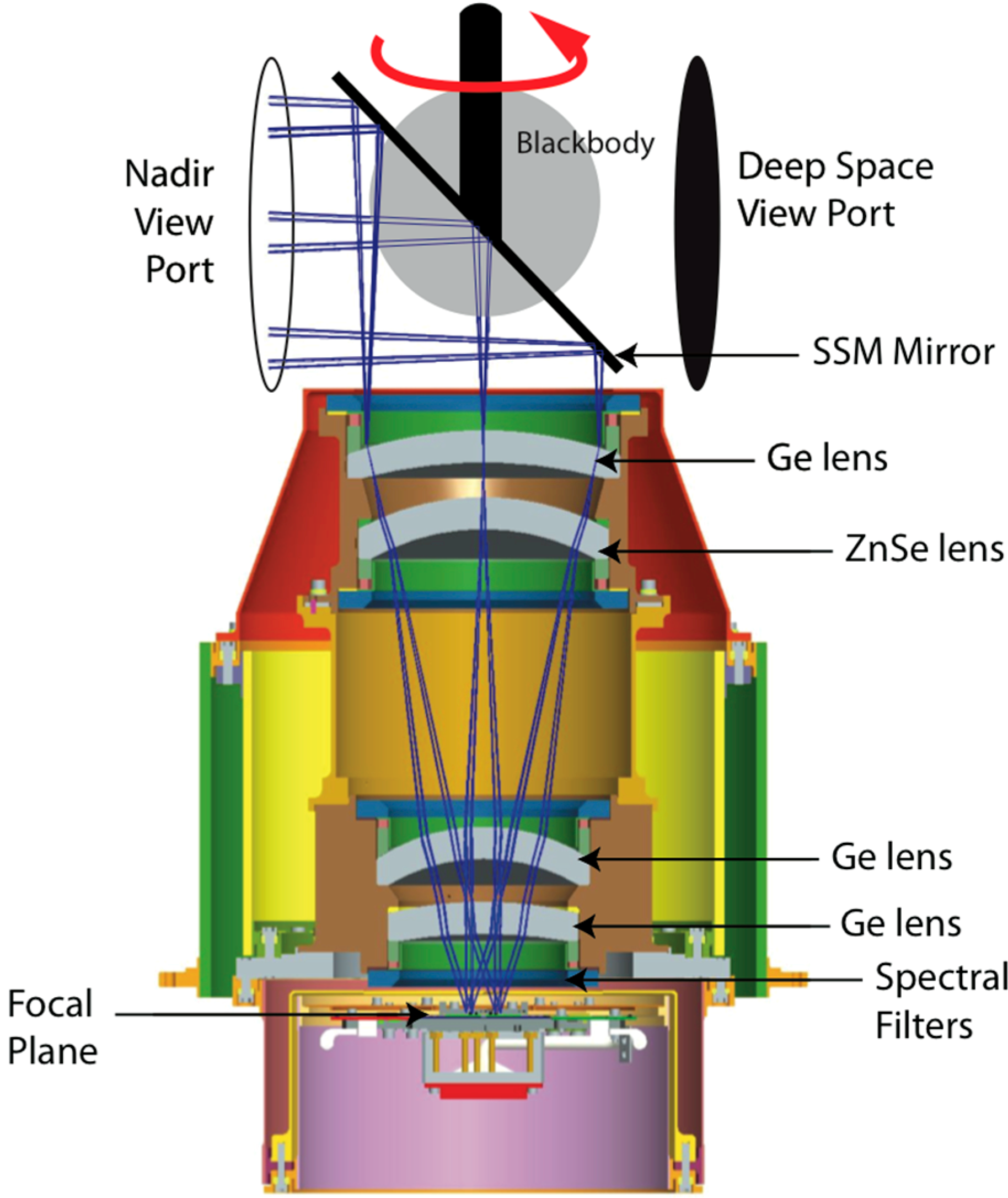
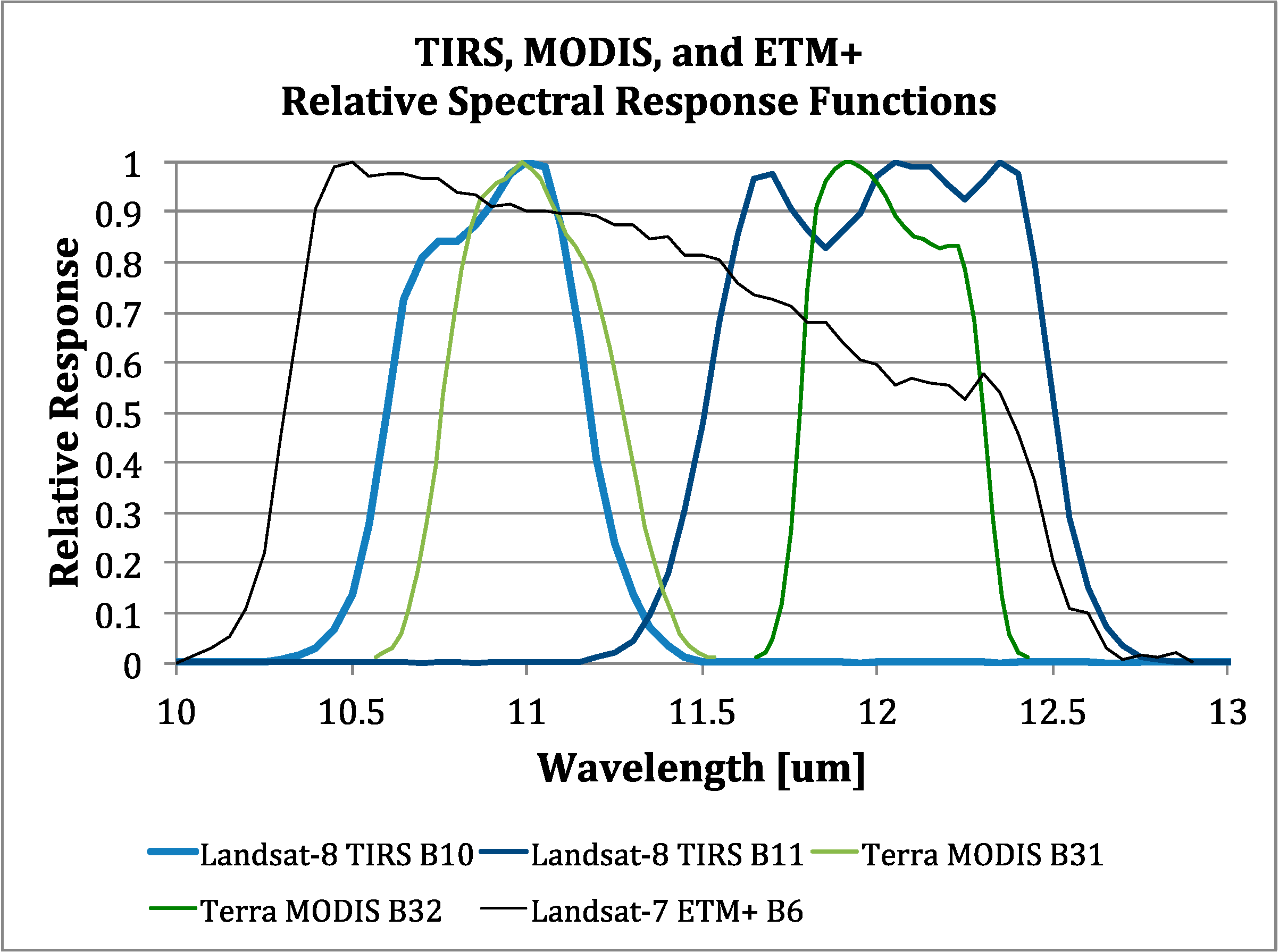
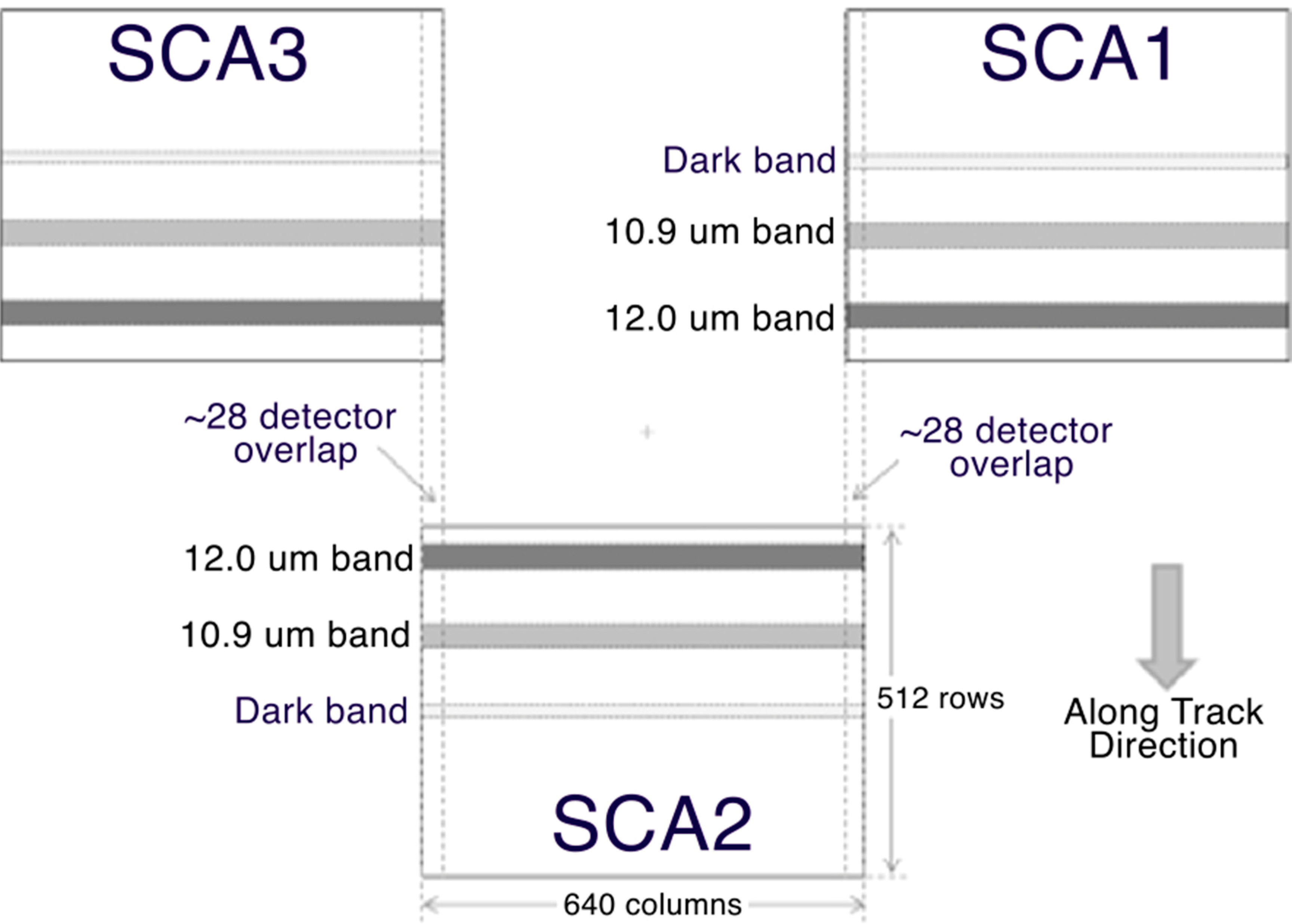
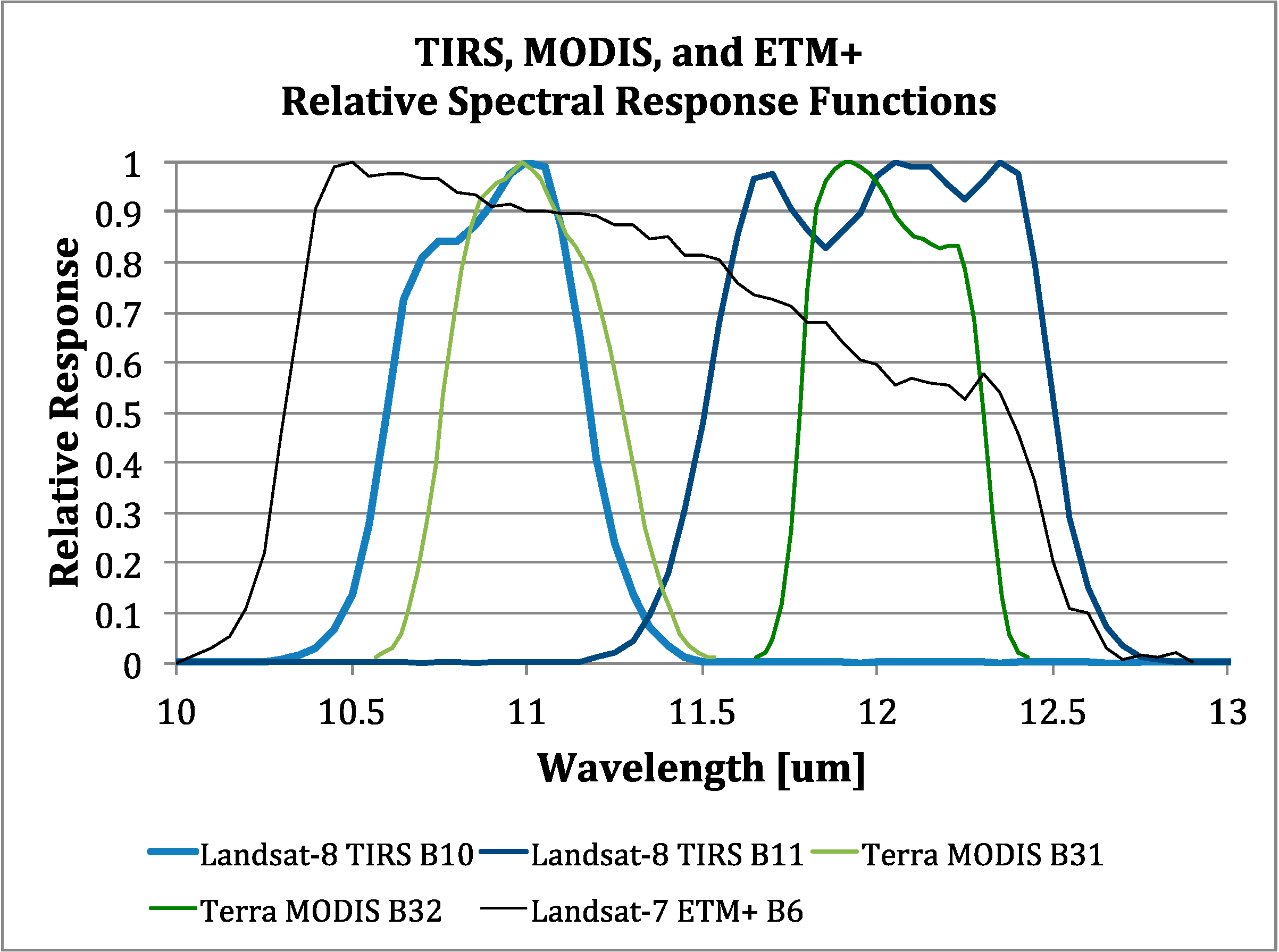
1.1. The TIRS Instrument

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Instrument | Band (#) | Center Wavelength (μm) | Bandwidth (μm) | Spatial Resolution (m) | Active Detectors (#) | NE∆T (K@280K) |
|---|---|---|---|---|---|---|
| TIRS | 10 | 10.9 | 0.6 | 100 | 1920 (3 × 640) | 0.05 |
| TIRS | 11 | 12.0 | 1.0 | 100 | 1920 | 0.06 |
| ETM+ | 6 | 11.3 | 2.0 | 60 | 8 | H: 0.22 L: 0.28 |
| TM | 6 | 11.4 | 2.0 | 120 | 4 | 0.17–0.30 |
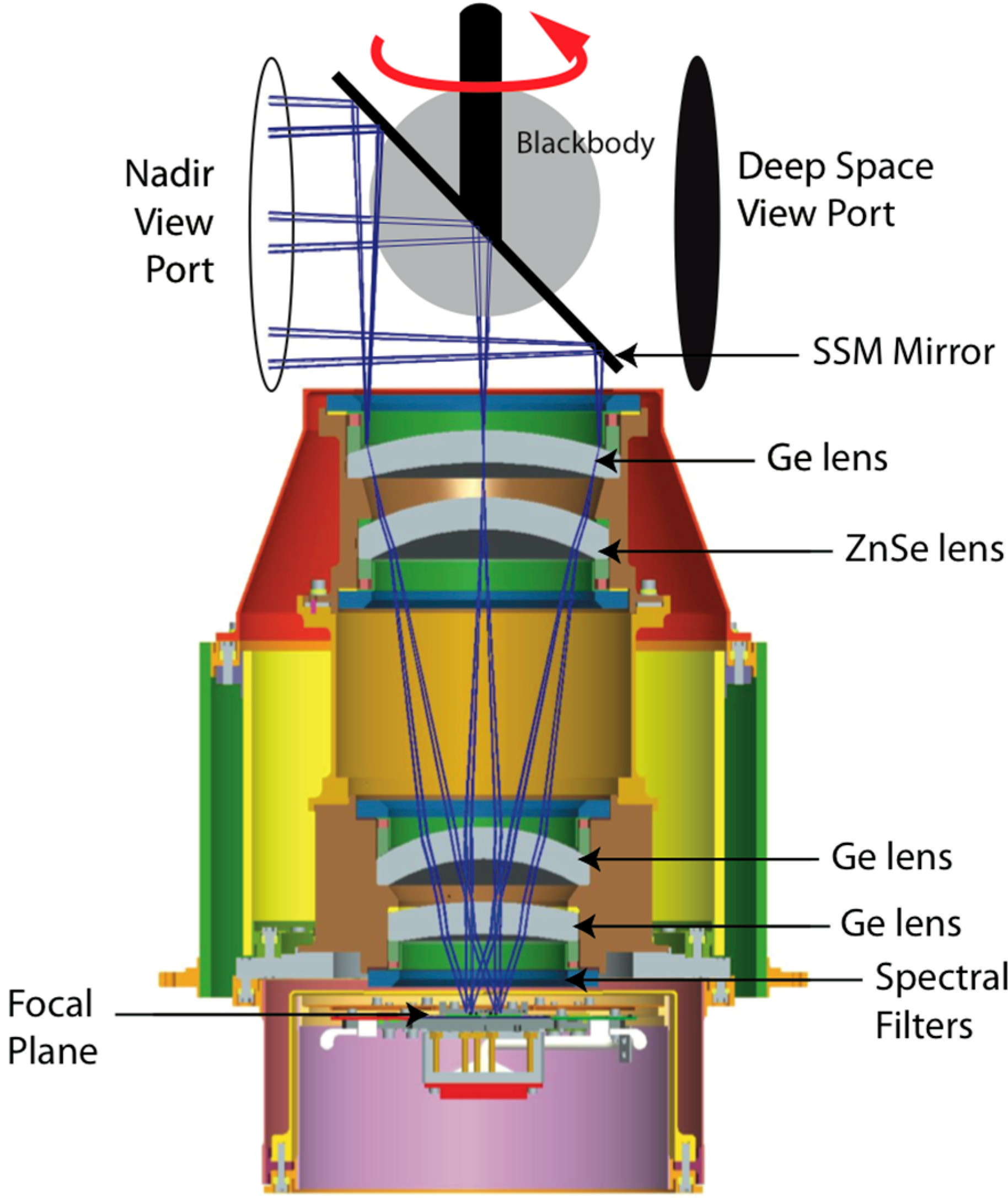
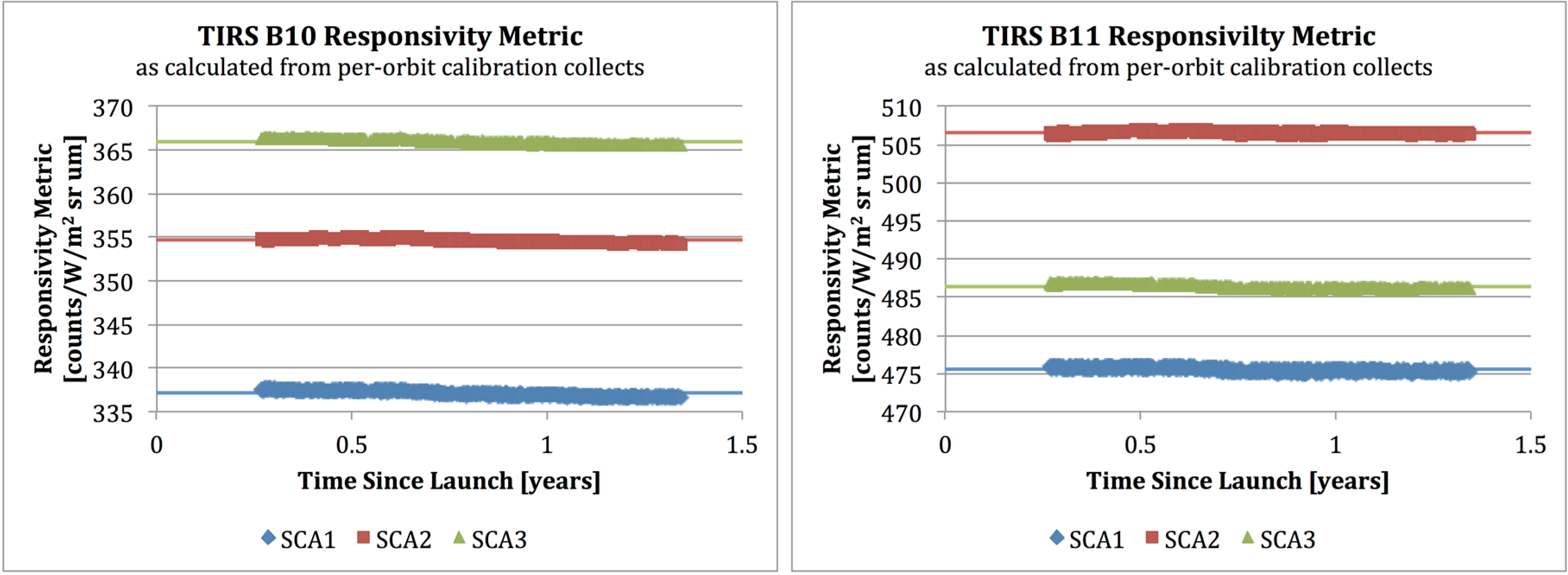
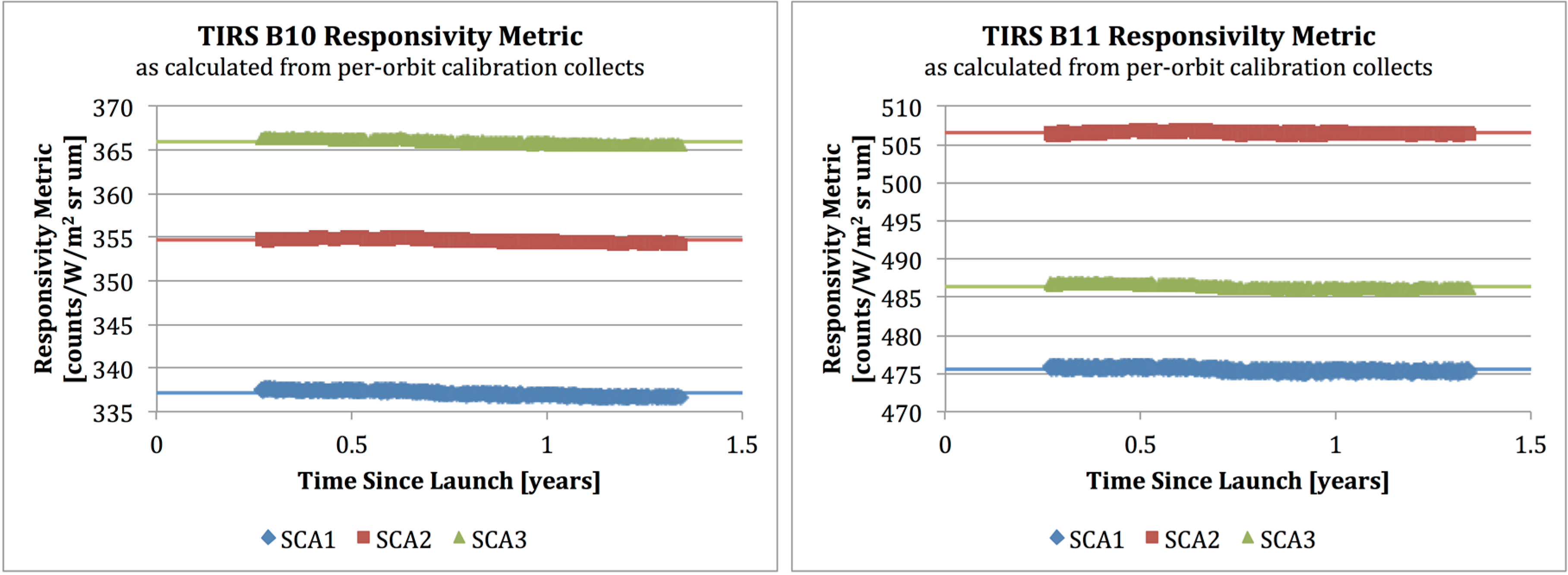
1.2. Internal Calibrator
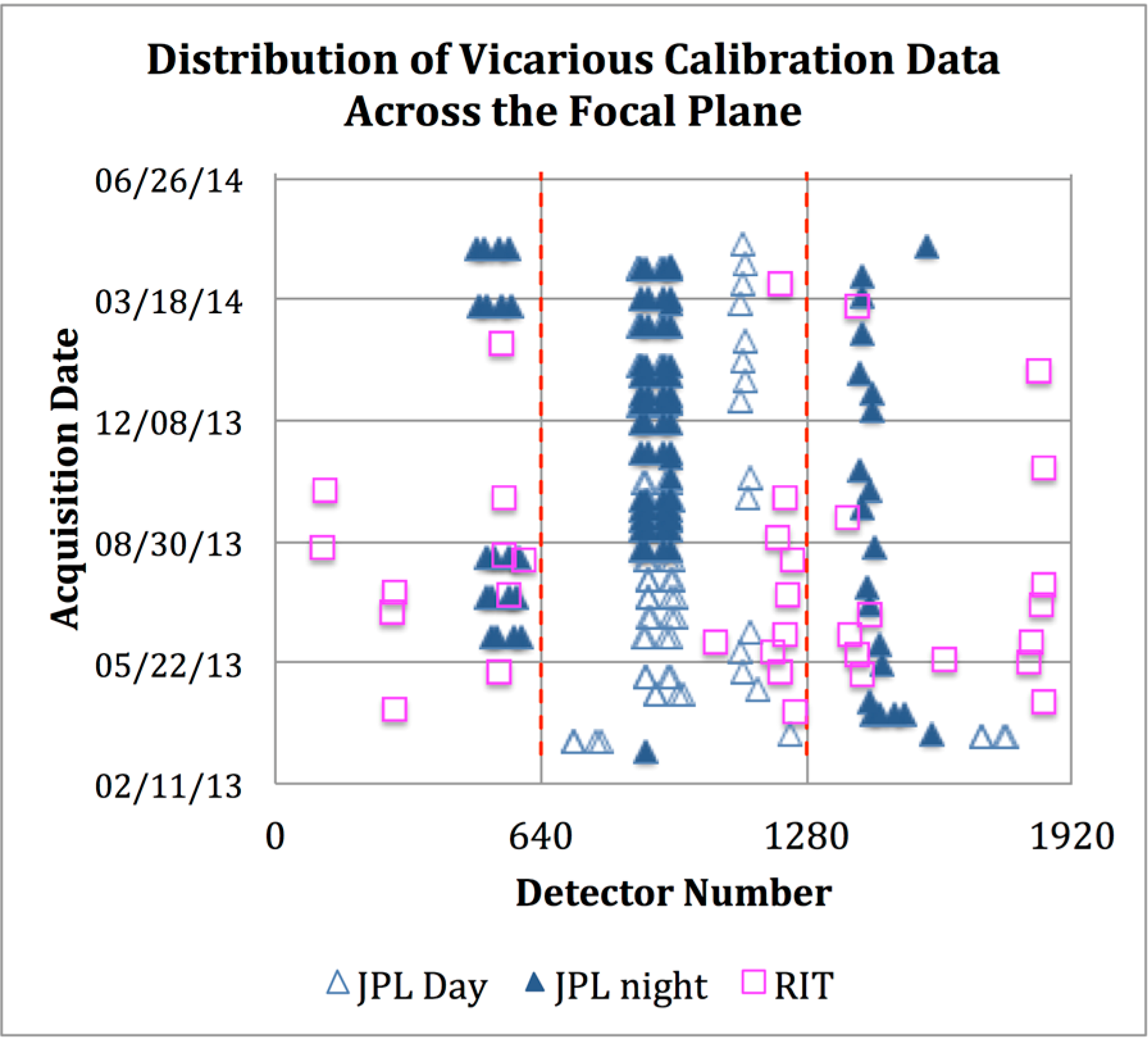
2. Vicarious Calibration Approaches
2.1. Buoy Methods
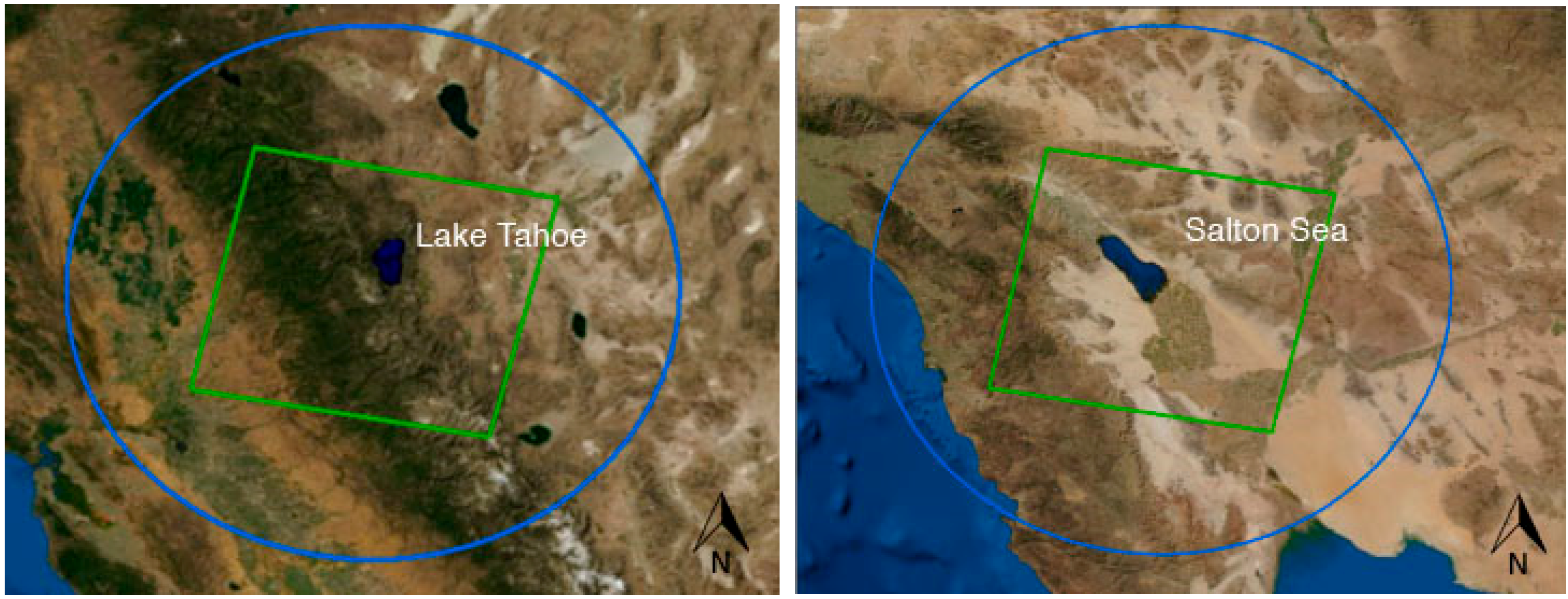
2.1.1. JPL Lake Tahoe and Salton Sea
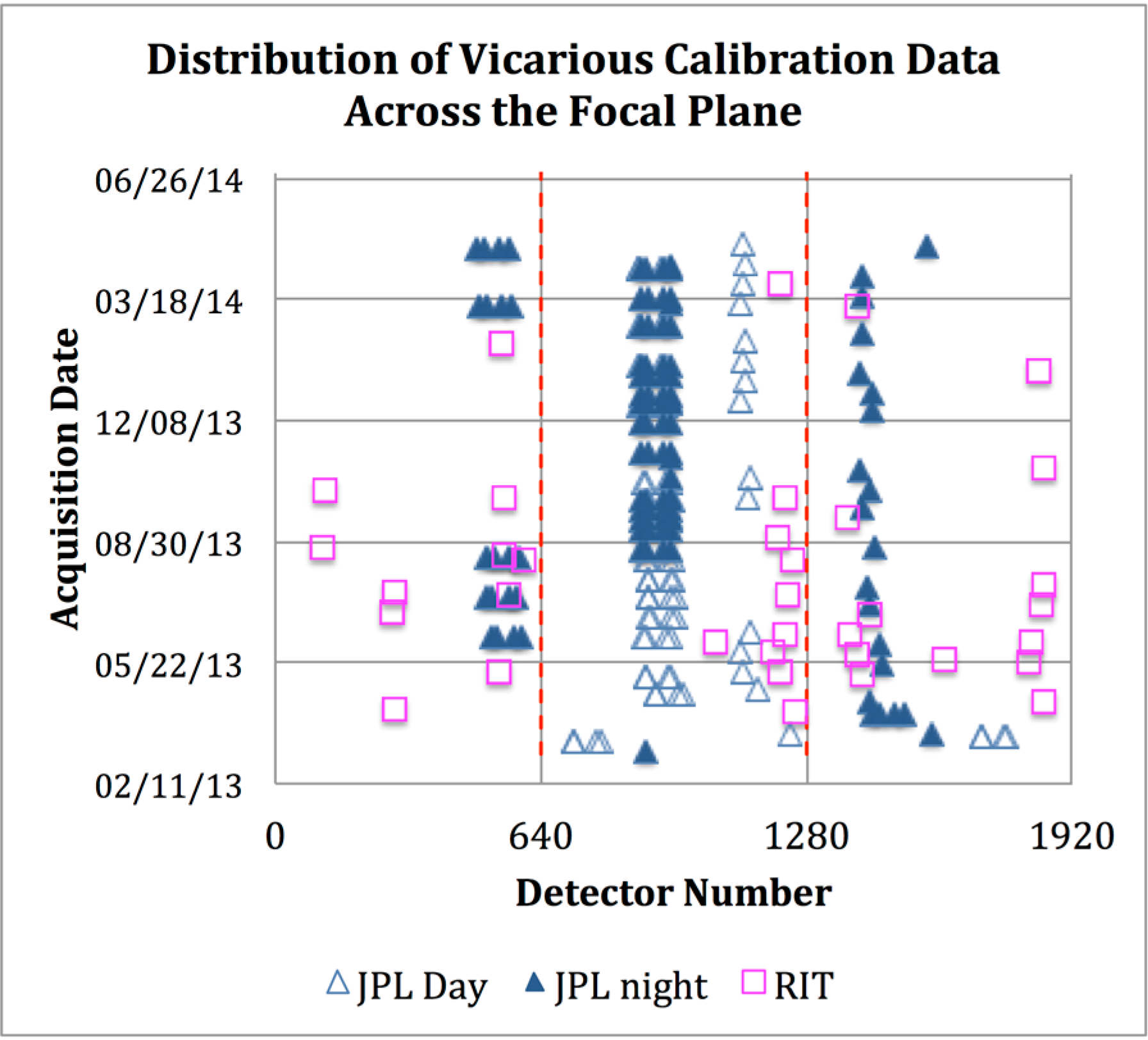
2.1.2. RIT NOAA Ocean and Great Lakes
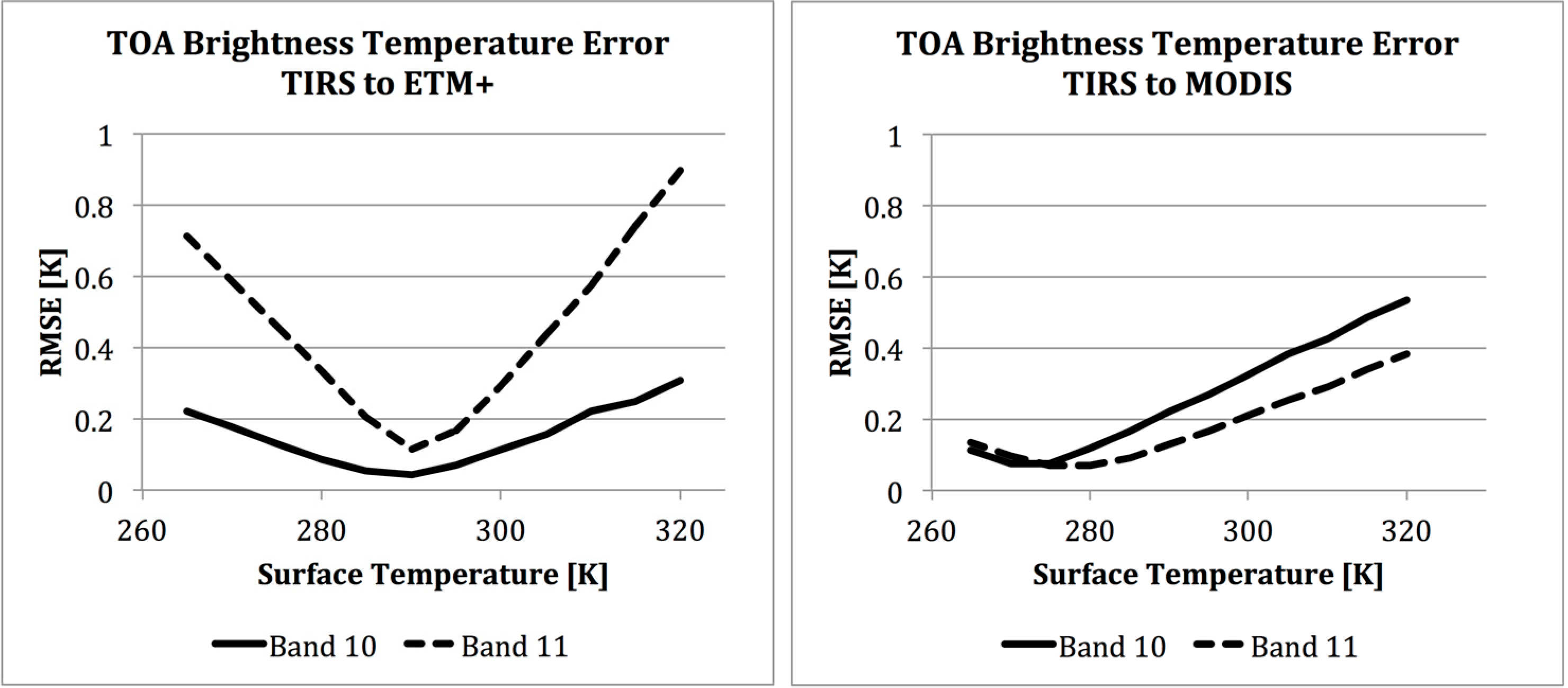
2.2. Inter-Satellite Top-of-Atmosphere Comparison
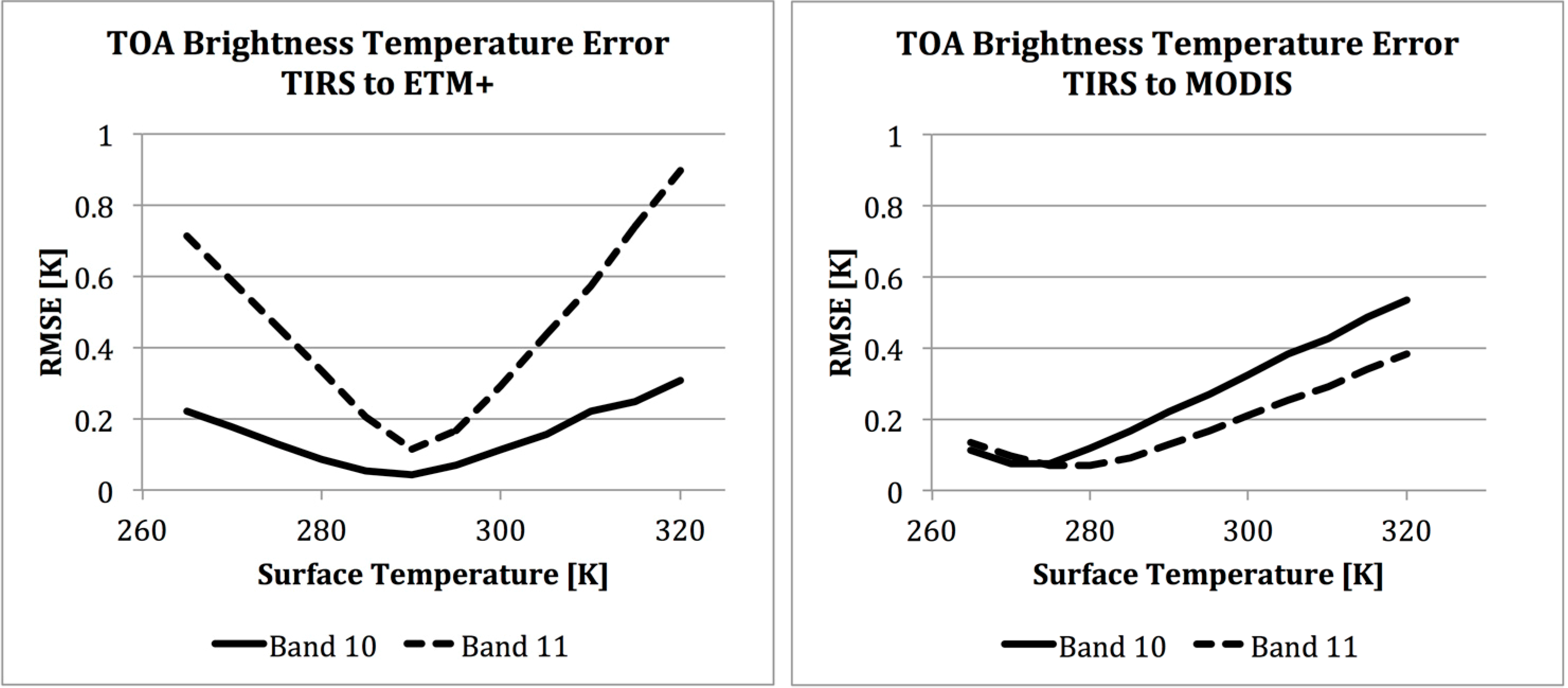
2.2.1. JPL MODIS and Landsat-8
2.2.2. RIT Landsat-7 and Landsat-8
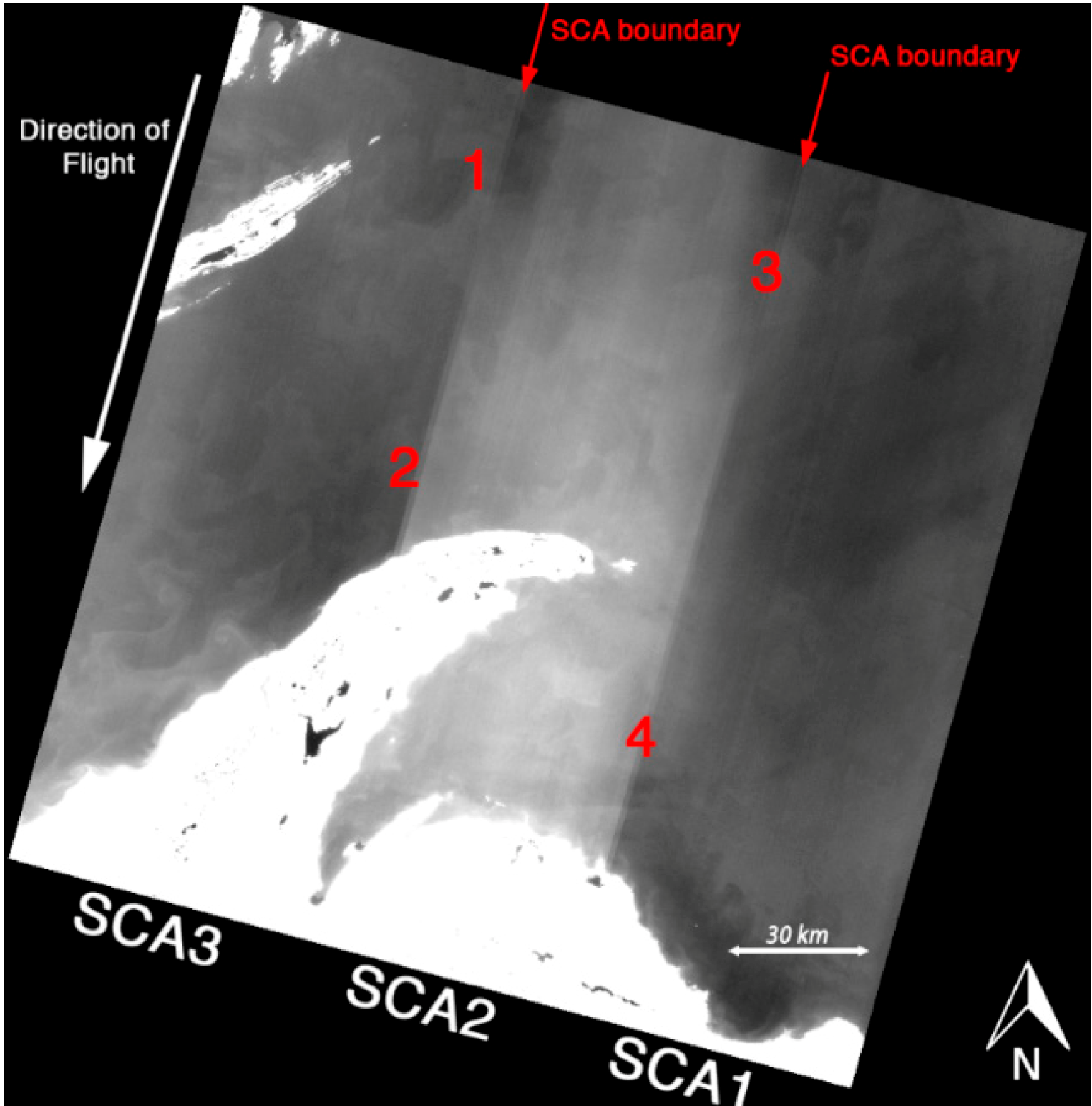
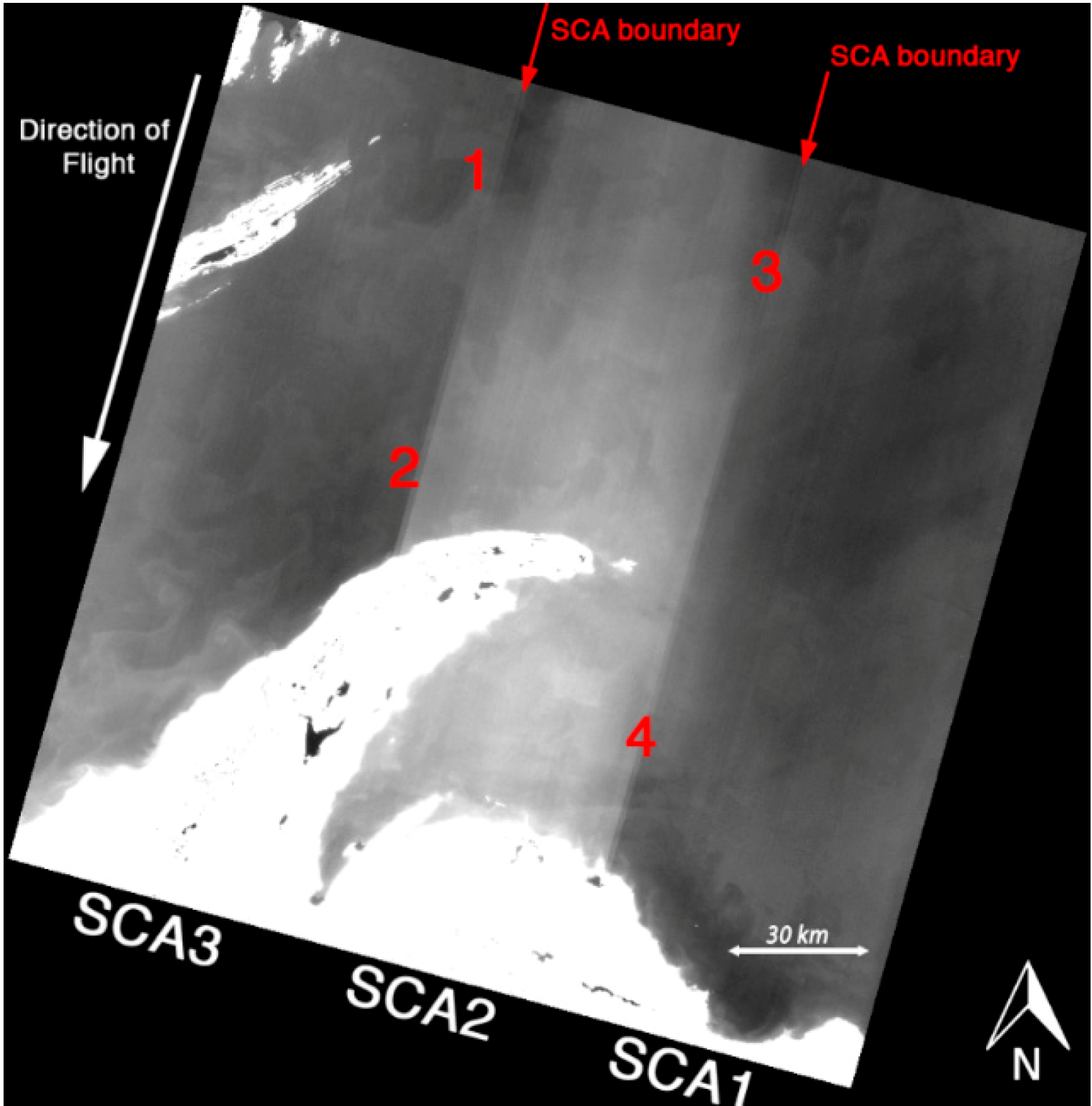
3. Stray Light Effect on Imagery
4. Vicarious Calibration Results
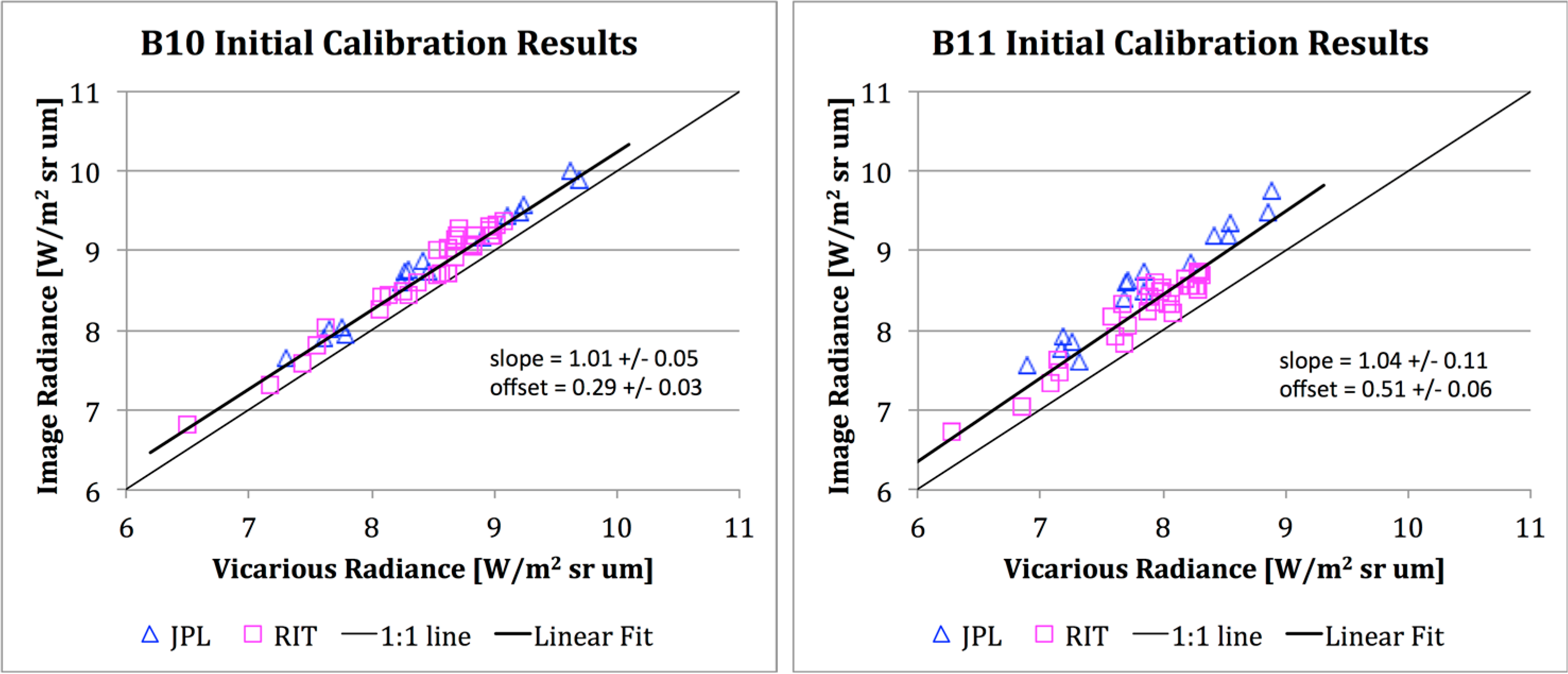
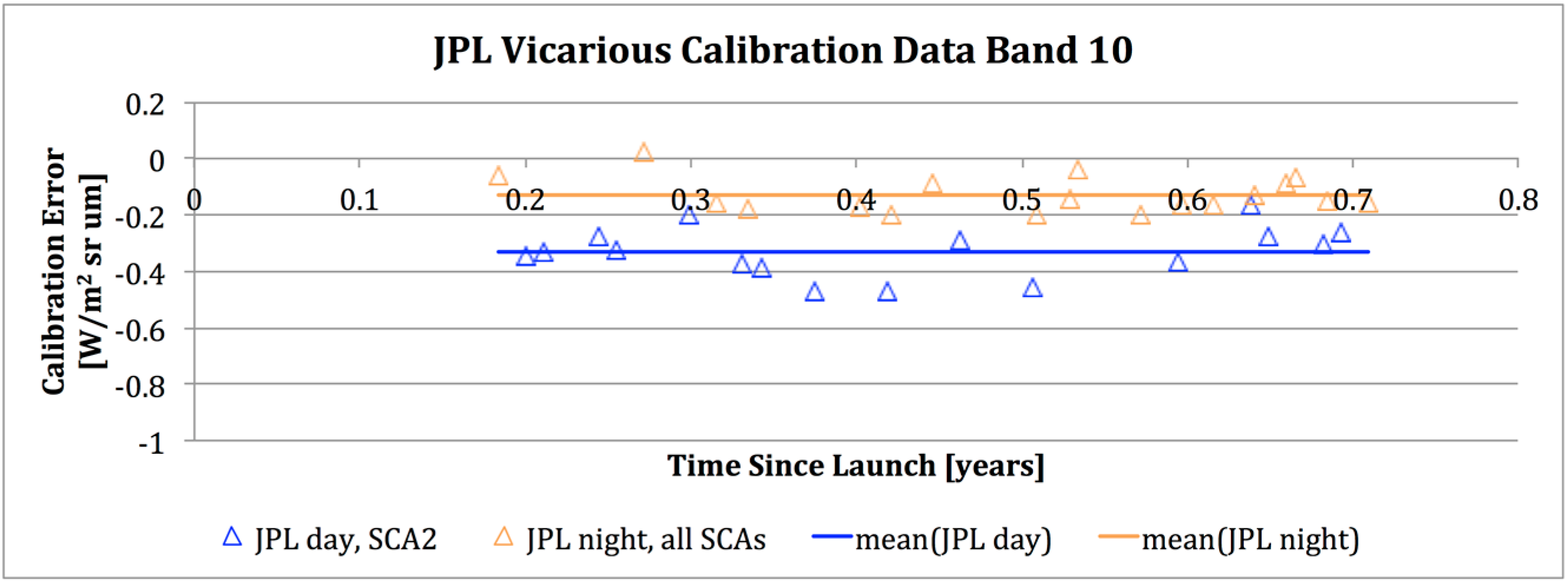
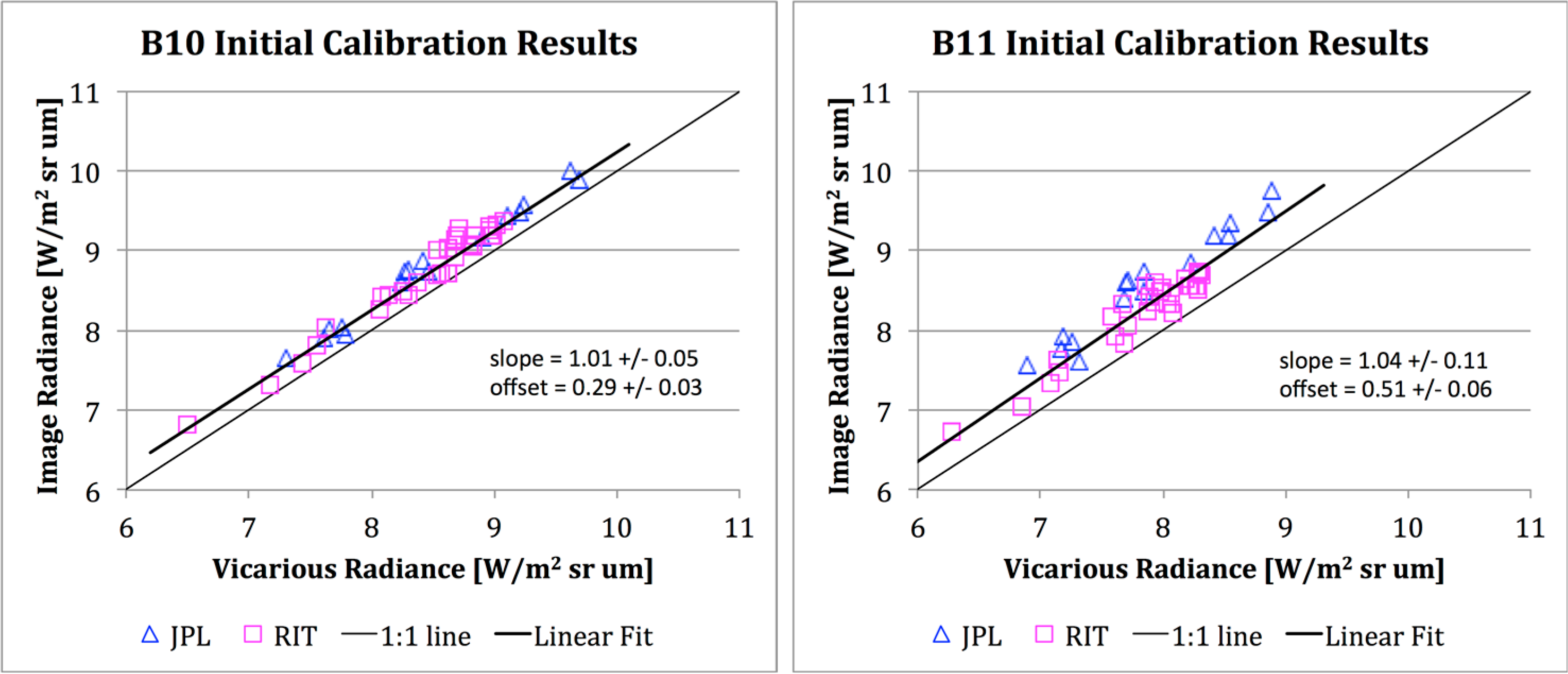
4.1. Initial Results
| Band Number | # Acquisitions | Calibration Error ± 95% Confidence Confidence | |
|---|---|---|---|
| (W/m2 sr μm) | |||
| Band 10 | Band 11 | ||
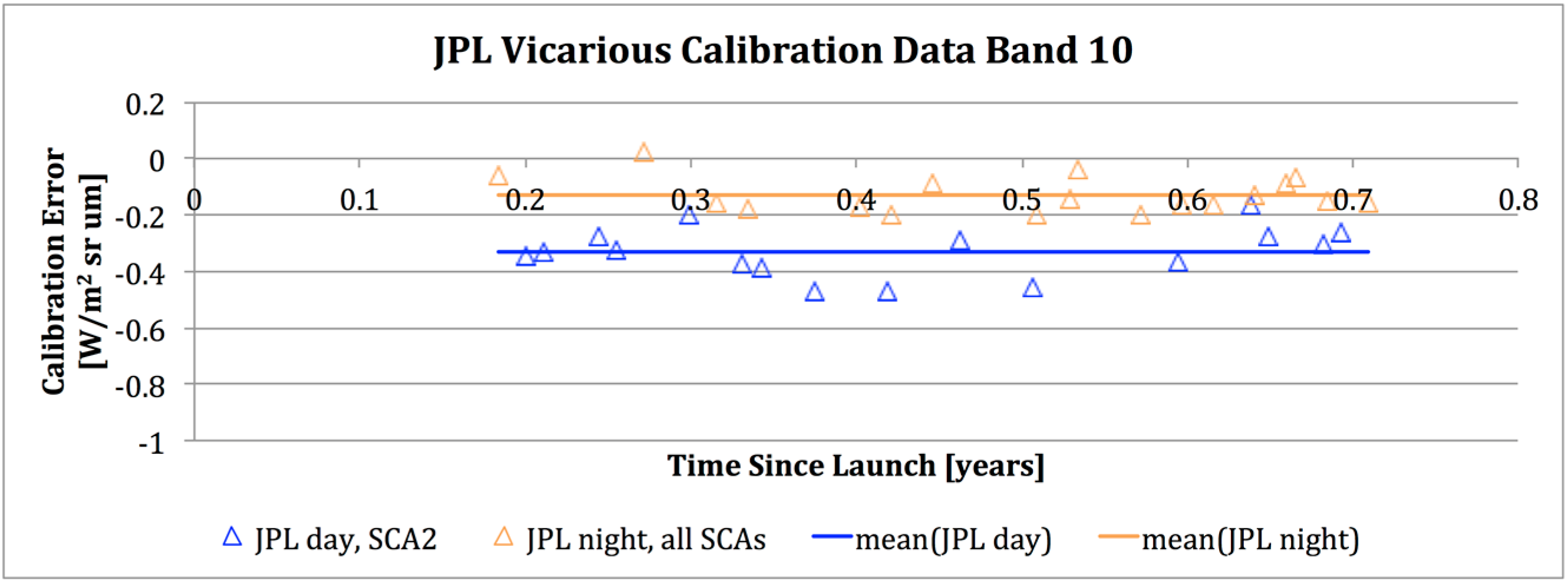
| Day | 16 | −0.33 ± 0.05 | −0.71 ± 0.08 |
| Night | 18 | −0.13 ± 0.03 | −0.27 ± 0.04 |
| TIRS Band | Bias Correction ± 1σ | Variability |
|---|---|---|
| (W/m2 sr μm) | (K at 300 K) | |
| 10 | −0.29 ± 0.12 | −2.1 ± 0.80 |
| 11 | −0.51 ± 0.20 | −4.4 ± 1.75 |
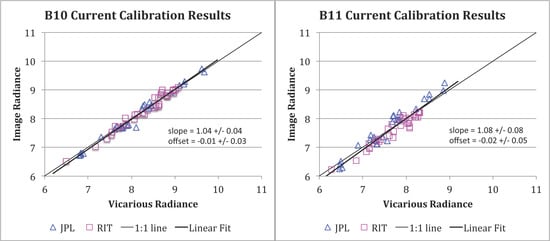
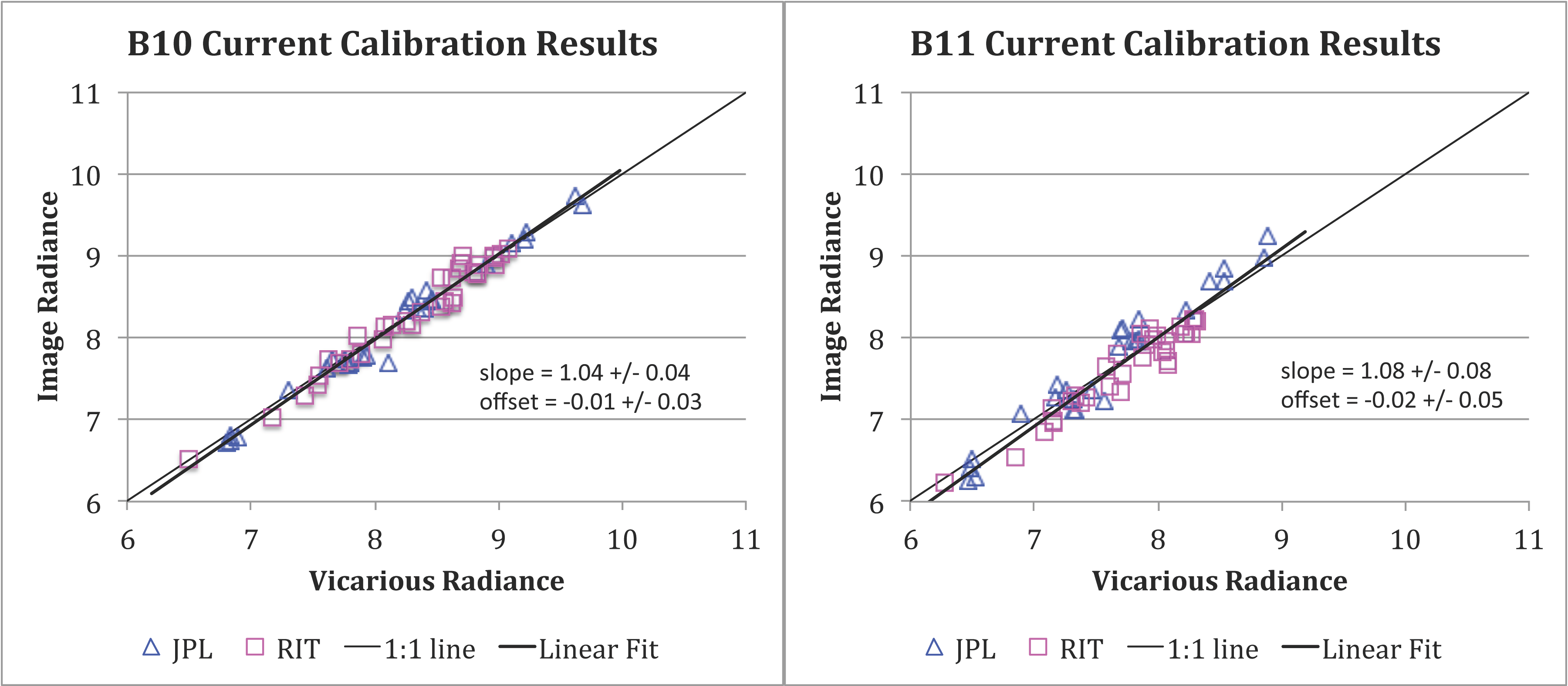
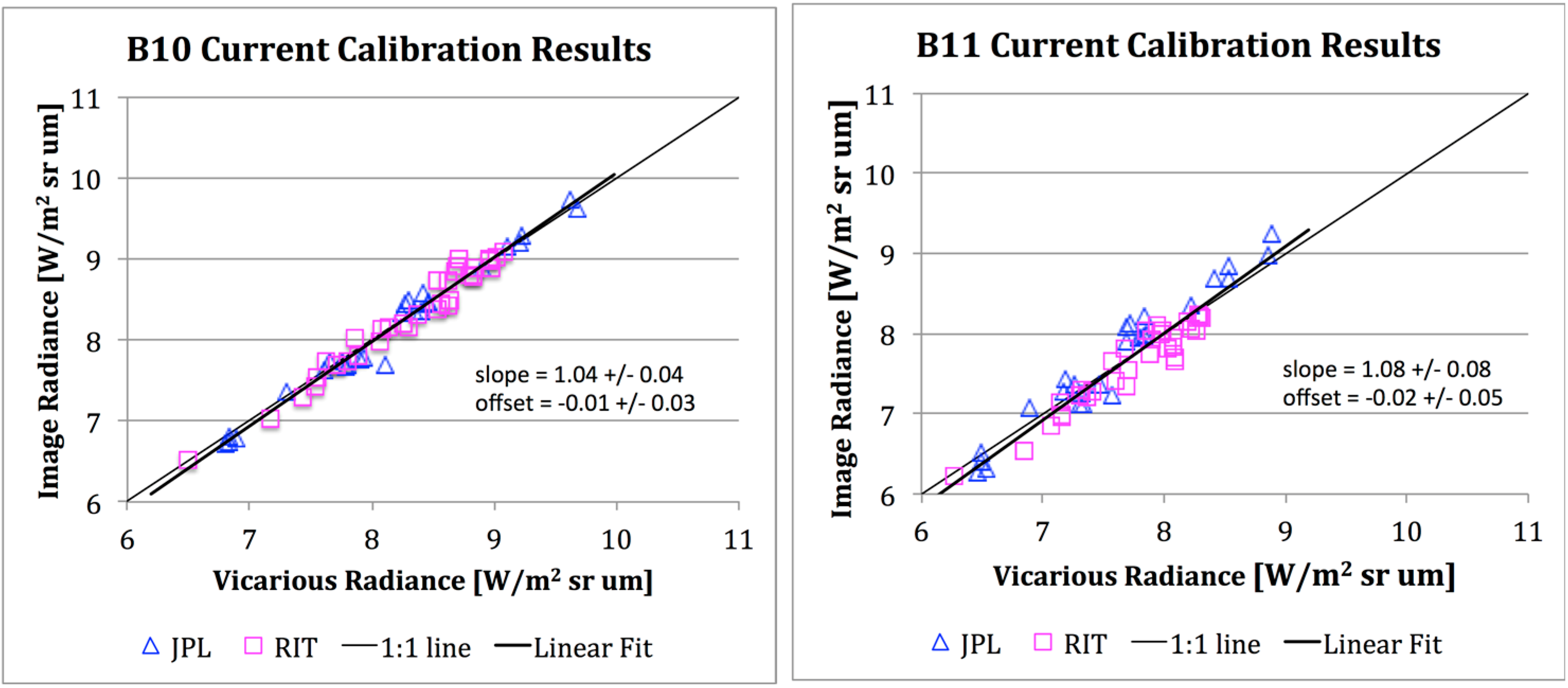
4.2. Current Status
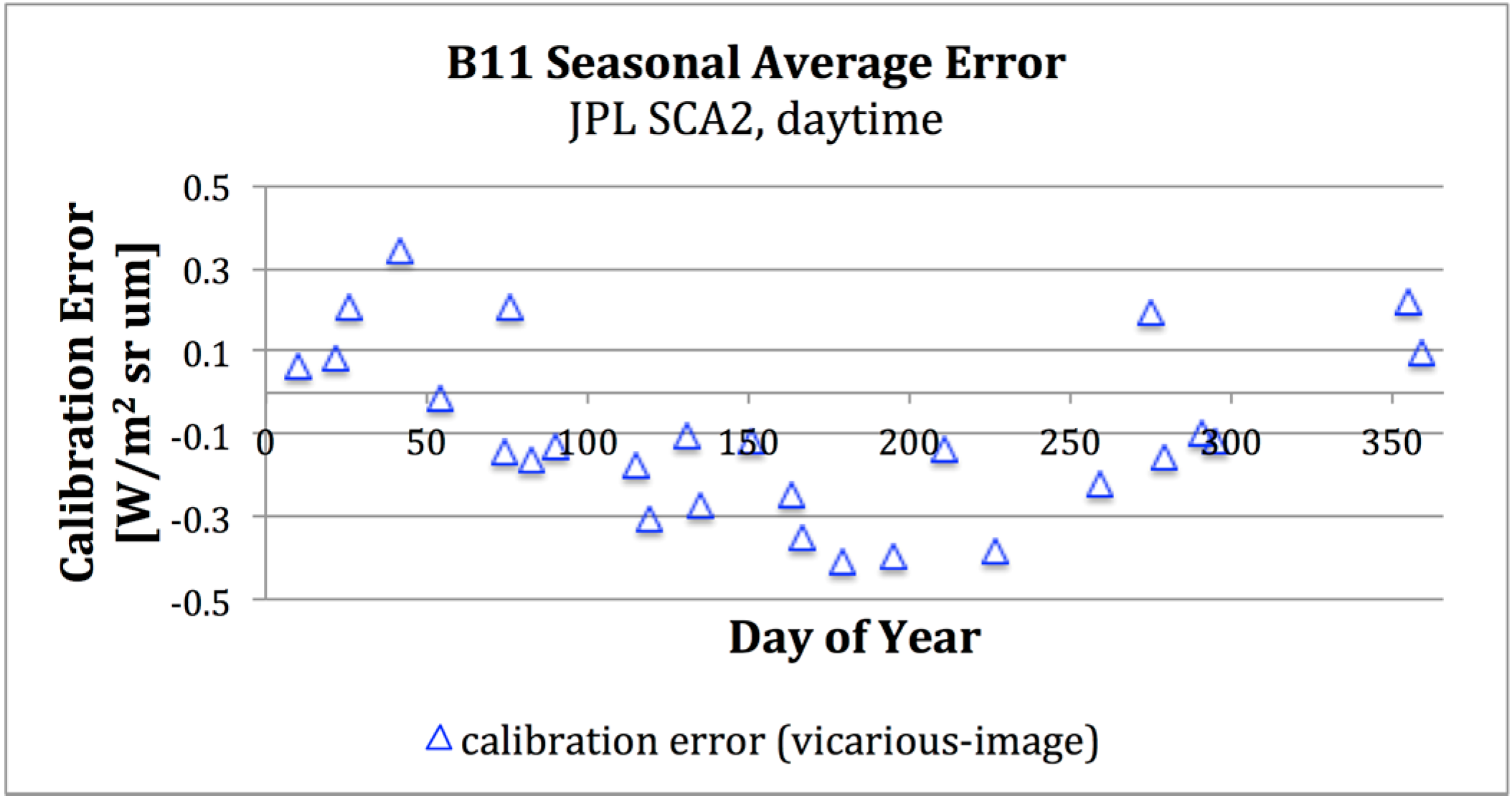
4.2.1. Seasonal Calibration Error
4.2.2. Inter-Satellite Comparison
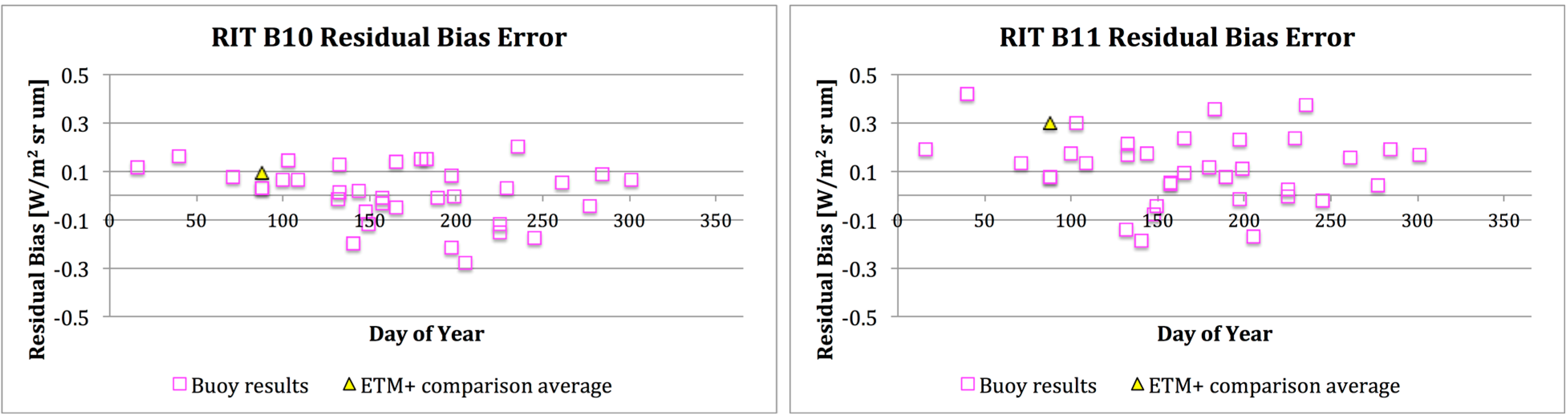
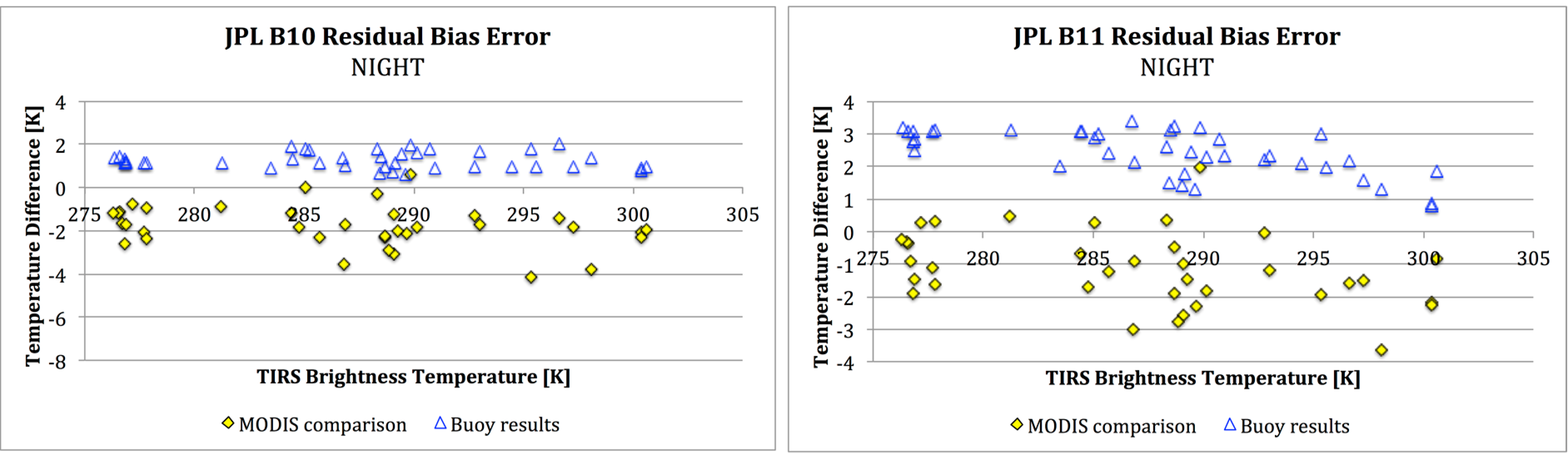
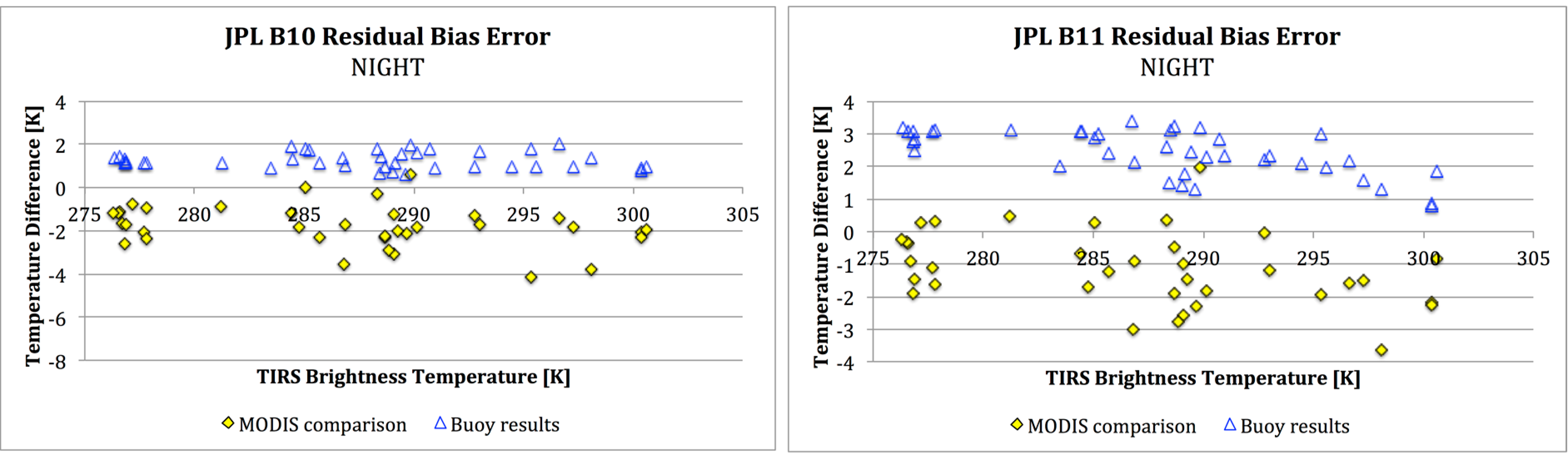
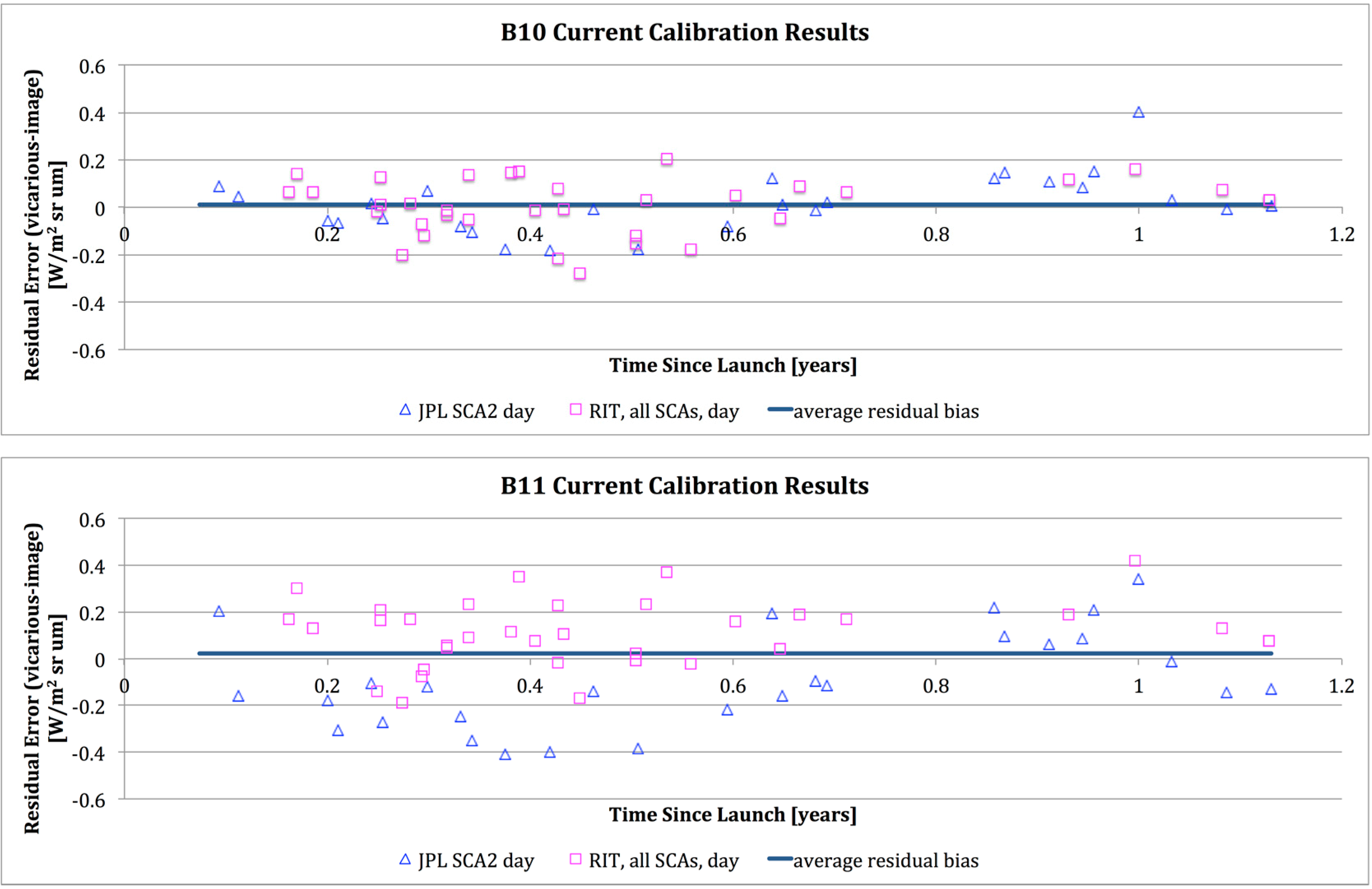
4.2.3. Current Residual Bias Error
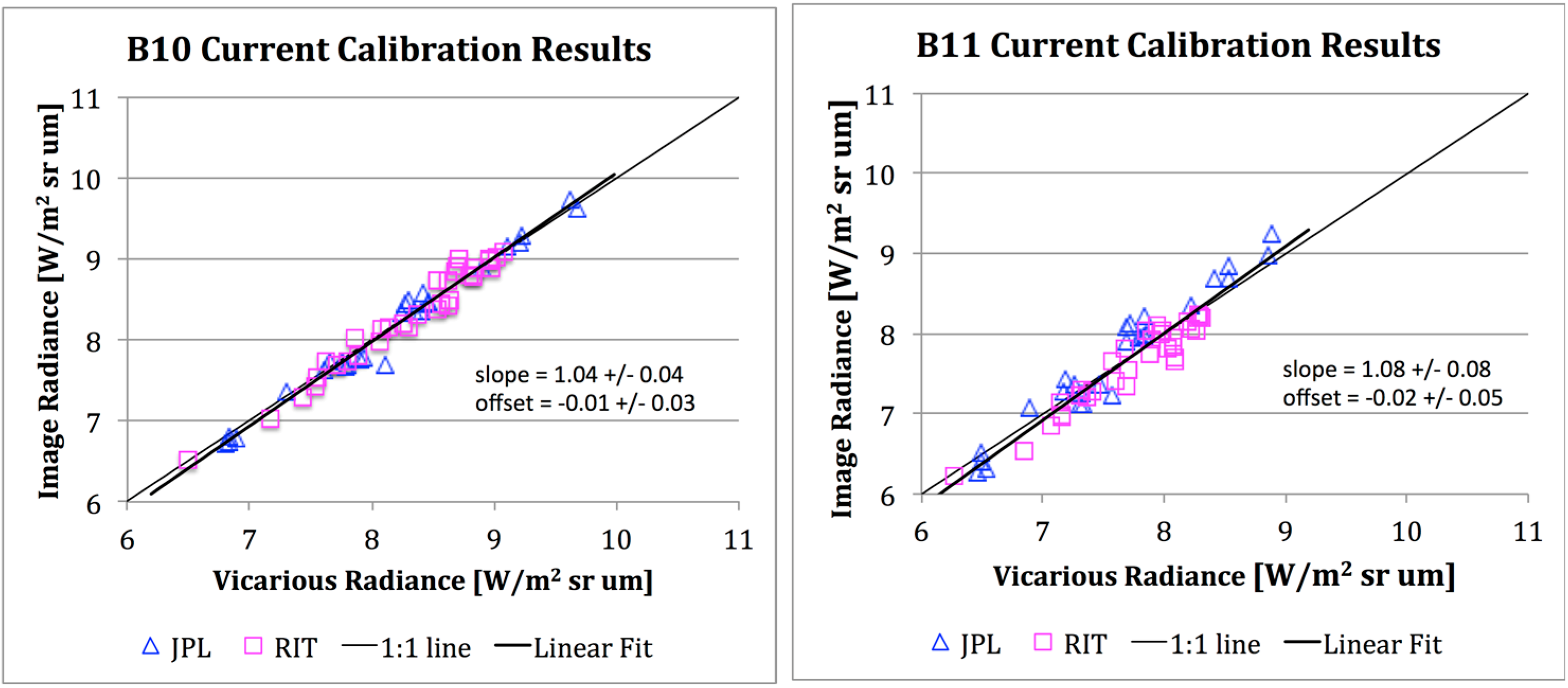
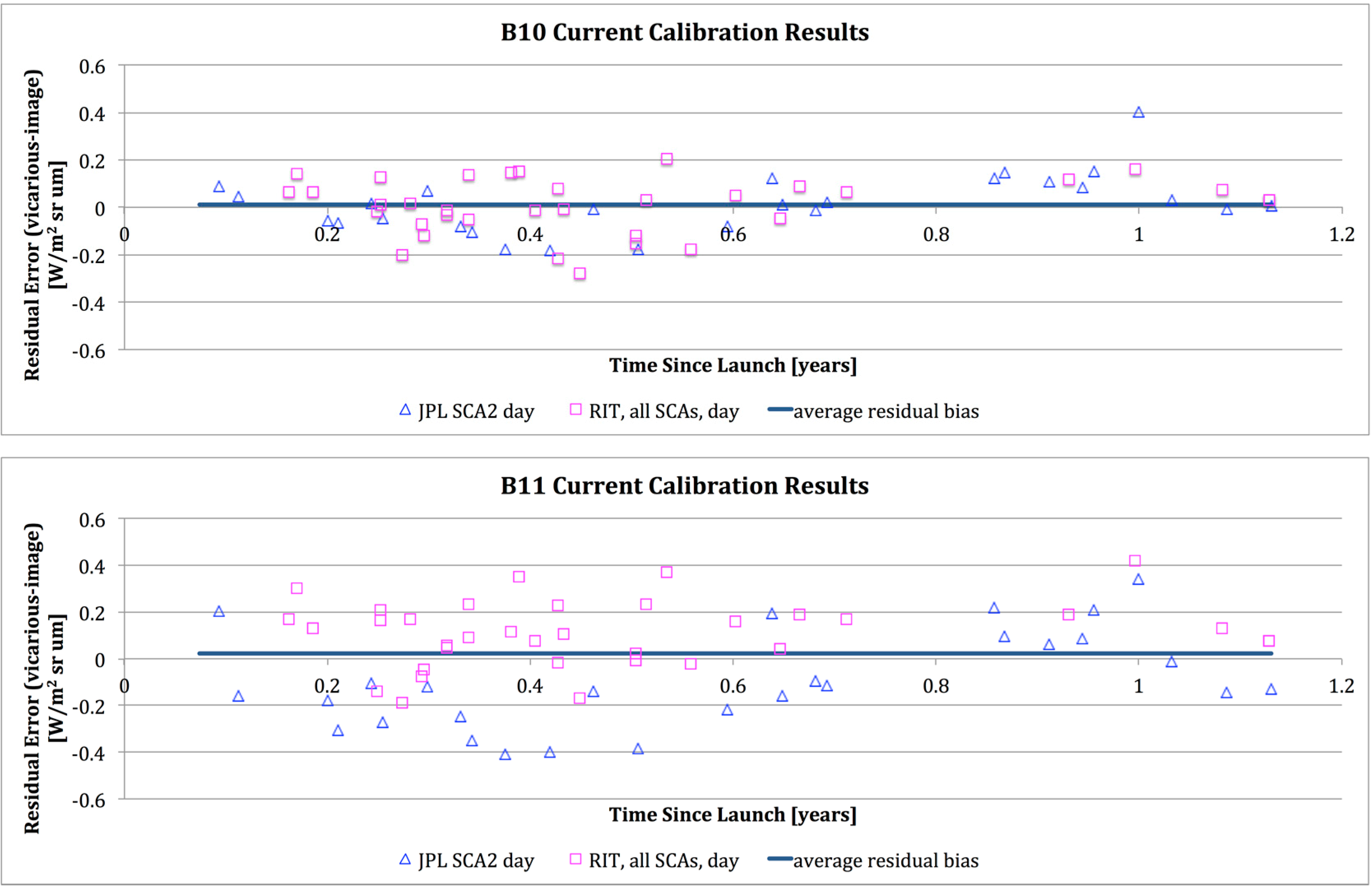
| Band Number | # Acquisitions | Calibration Error ± 95% Confidence | RMS Variability (1σ) | ||
|---|---|---|---|---|---|
| (W/m2 sr μm) | (K at 300 K) | (W/m2 sr μm) | (K at 300 K) | ||
| Band 10 | 63 | −0.01 ± 0.03 | −0.09 ± 0.21 | 0.12 | 0.87 |
| Band 11 | 63 | −0.02 ± 0.05 | −0.20 ± 0.42 | 0.20 | 1.67 |
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Knight, E.J.; Kvaran, G. Landsat-8 Operational Land Imager design, characterization, and performance. Remote Sens. 2014, 6, 10286–10305. [Google Scholar] [CrossRef]
- Barsi, J.A.; Lee, K.; Markham, B.L.; Kvaran, G.; Pedelty, J.A. The spectral response of the Landsat-8 Operational Land Imager. Remote Sens. 2014, 6, 10232–10251. [Google Scholar] [CrossRef]
- Markham, B.L.; Barsi, J.A.; Kvaran, G.; Ong, L.; Kaita, E.; Biggar, S.; Czapla-Myers, J.; Mishra, N.; Helder, D.L. Landsat-8 Operational Land Imager radiometric calibration and stability. Remote Sens. 2014, in press. [Google Scholar]
- Schott, J.R.; Barsi, J.A.; Nordgren, B.L.; Raqueno, N.G.; de Alwis, D. Calibration of Landsat thermal data and application to water resource studies. Remote Sens. Environ. 2001, 78, 108–117. [Google Scholar] [CrossRef]
- Steissberg, T.E.; Hook, S.J.; Schladow, S.G. Measuring surface currents in lakes with high spatial resolution thermal infrared imagery. Geophys. Res. Lett. 2005, 32. [Google Scholar] [CrossRef]
- Allen, R.G.; Hendricks, J.M.H.; Toll, D.; Anderson, M.; Kustas, W.; Kleissl, J. From high overhead-ET measurement via remote sensing. Southwest Hydrol. 2008, 7, 30–32. [Google Scholar]
- Thenkabail, P.S.; Biradar, C.M.; Noojipady, P.; Dheeravath, V.; Li, Y.; Velpuri, M.; Gumma, M.; Gangalakunta, O.R.P.; Turral, H.; Cai, X.L.; et al. Global irrigated area map (GIAM), derived from remote sensing, for the end of the last millennium. Int. J. Remote Sens. 2009, 30, 3679–3733. [Google Scholar] [CrossRef]
- Schott, J.R.; Hook, S.J.; Barsi, J.A.; Markham, B.L.; Miller, J.; Padula, F.P.; Raqueno, N.G. Thermal infrared radiometric calibration of the entire Landsat 4, 5, and 7 archive (1982–2010). Remote Sens. Environ. 2012, 122, 41–49. [Google Scholar] [CrossRef]
- Reuter, D.C.; Richardson, C.; Pellerano, F.; Irons, J.R.; Allen, R.; Anderson, M.; Jhabvala, M.; Lunsford, A.; Montanaro, M.; Smith, R.; et al. The Thermal Infrared Sensor (TIRS) on Landsat 8: Design overview and pre-launch characterization. Remote Sens. 2014, in press. [Google Scholar]
- Montanaro, M.; Levy, R.; Markham, B. On-orbit radiometric performance of the Landsat 8 Thermal Infrared Sensor. Remote Sens. 2014. submitted for publication. [Google Scholar]
- Caselles, V.; Rubio, E.; Coll, C.; Valor, E. Thermal band selection for the PRISM instrument: 3. Optimal band configurations. J. Geophys. Res. Atmos. 1998, 103, 17057–17067. [Google Scholar] [CrossRef]
- Montanaro, M.; Lunsford, A.; Tesfaye, Z.; Wenny, B.; Reuter, D. Radiometric calibration methodology of the Landsat 8 Thermal Infrared Sensor. Remote Sens. 2014, 6, 8803–8821. [Google Scholar] [CrossRef]
- Berk, A.; Anderson, G.P.; Bernstein, L.S.; Acharya, P.K.; Dothe, H.; Matthew, M.W.; Adler-Golden, S.M.; Chetwynd, J.H., Jr.; Richtsmeier, S.C.; Pukall, B.; et al. MODTRAN4 radiative transfer modeling for atmospheric correction. In Optical Spectroscopic Techniques and Instrumentation for Atmospheric and Space Research III; Larar, A.M., Ed.; SPIE-Int. Soc. Optical Engineering: Bellingham, WA, USA, 1999; pp. 348–353. [Google Scholar]
- Hook, S.J.; Chander, G.; Barsi, J.A.; Alley, R.E.; Abtahi, A.; Palluconi, F.D.; Markham, B.L.; Richards, R.C.; Schladow, S.G.; Helder, D.L. In-flight validation and recovery of water surface temperature with Landsat-5 thermal infrared data using an automated high-altitude lake validation site at Lake Tahoe. IEEE Trans. Geosci. Remote Sens. 2004, 42, 2767–2776. [Google Scholar] [CrossRef]
- Hook, S.J.; Prata, F.J.; Alley, R.E.; Abtahi, A.; Richards, R.C.; Schladow, S.G.; Palmarsson, S.O. Retrieval of lake bulk and skin temperatures using Along-Track Scanning Radiometer (ATSR-2) data: A case study using Lake Tahoe, California. J. Atmos. Ocean. Technol. 2003, 20, 534–548. [Google Scholar] [CrossRef]
- Hook, S.J.; Clodius, W.B.; Balick, L.; Alley, R.E.; Abtahi, A.; Richards, R.C.; Schladow, S.G. In-flight validation of mid-and thermal infrared data from the Multispectral Thermal Imager (MTI) using an automated high-altitude validation site at Lake Tahoe CA/NV, USA. IEEE Trans. Geosci. Remote Sens. 2005, 43, 1991–1999. [Google Scholar] [CrossRef]
- Hook, S.J.; Vaughan, R.G.; Tonooka, H.; Schladow, S.G. Absolute radiometric in-flight validation of mid infrared and thermal infrared data from ASTER and MODIS on the Terra spacecraft using the Lake Tahoe, CA/NV, USA, automated validation site. IEEE Trans. Geosci. Remote Sens. 2007, 45, 1798–1807. [Google Scholar] [CrossRef]
- Padula, F.P.; Schott, J.R.; Barsi, J.A.; Raqueno, N.G.; Hook, S.J. Calibration of Landsat 5 thermal infrared channel: Updated calibration history and assessment of the errors associated with the methodology. Can. J. Remote Sens. 2010, 36, 617–630. [Google Scholar] [CrossRef]
- NCEP North American Regional Reanalysis: NARR. Available online: http: //www.esrl.noaa.gov/psd/data/gridded/data.narr.html (accessed on 10 September 2014).
- Montanaro, M.; Gerace, A.; Lunsford, A.; Reuter, D. Stray light artifacts in imagery from the Landsat 8 Thermal Infrared Sensor. Remote Sens. 2014, 6, 10435–10456. [Google Scholar] [CrossRef]
© 2014 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Barsi, J.A.; Schott, J.R.; Hook, S.J.; Raqueno, N.G.; Markham, B.L.; Radocinski, R.G. Landsat-8 Thermal Infrared Sensor (TIRS) Vicarious Radiometric Calibration. Remote Sens. 2014, 6, 11607-11626. https://doi.org/10.3390/rs61111607
Barsi JA, Schott JR, Hook SJ, Raqueno NG, Markham BL, Radocinski RG. Landsat-8 Thermal Infrared Sensor (TIRS) Vicarious Radiometric Calibration. Remote Sensing. 2014; 6(11):11607-11626. https://doi.org/10.3390/rs61111607
Chicago/Turabian StyleBarsi, Julia A., John R. Schott, Simon J. Hook, Nina G. Raqueno, Brian L. Markham, and Robert G. Radocinski. 2014. "Landsat-8 Thermal Infrared Sensor (TIRS) Vicarious Radiometric Calibration" Remote Sensing 6, no. 11: 11607-11626. https://doi.org/10.3390/rs61111607
APA StyleBarsi, J. A., Schott, J. R., Hook, S. J., Raqueno, N. G., Markham, B. L., & Radocinski, R. G. (2014). Landsat-8 Thermal Infrared Sensor (TIRS) Vicarious Radiometric Calibration. Remote Sensing, 6(11), 11607-11626. https://doi.org/10.3390/rs61111607