A Multi-Scale Flood Monitoring System Based on Fully Automatic MODIS and TerraSAR-X Processing Chains

Abstract
:1. Introduction
2. Methodology
2.1. MODIS Flood Service
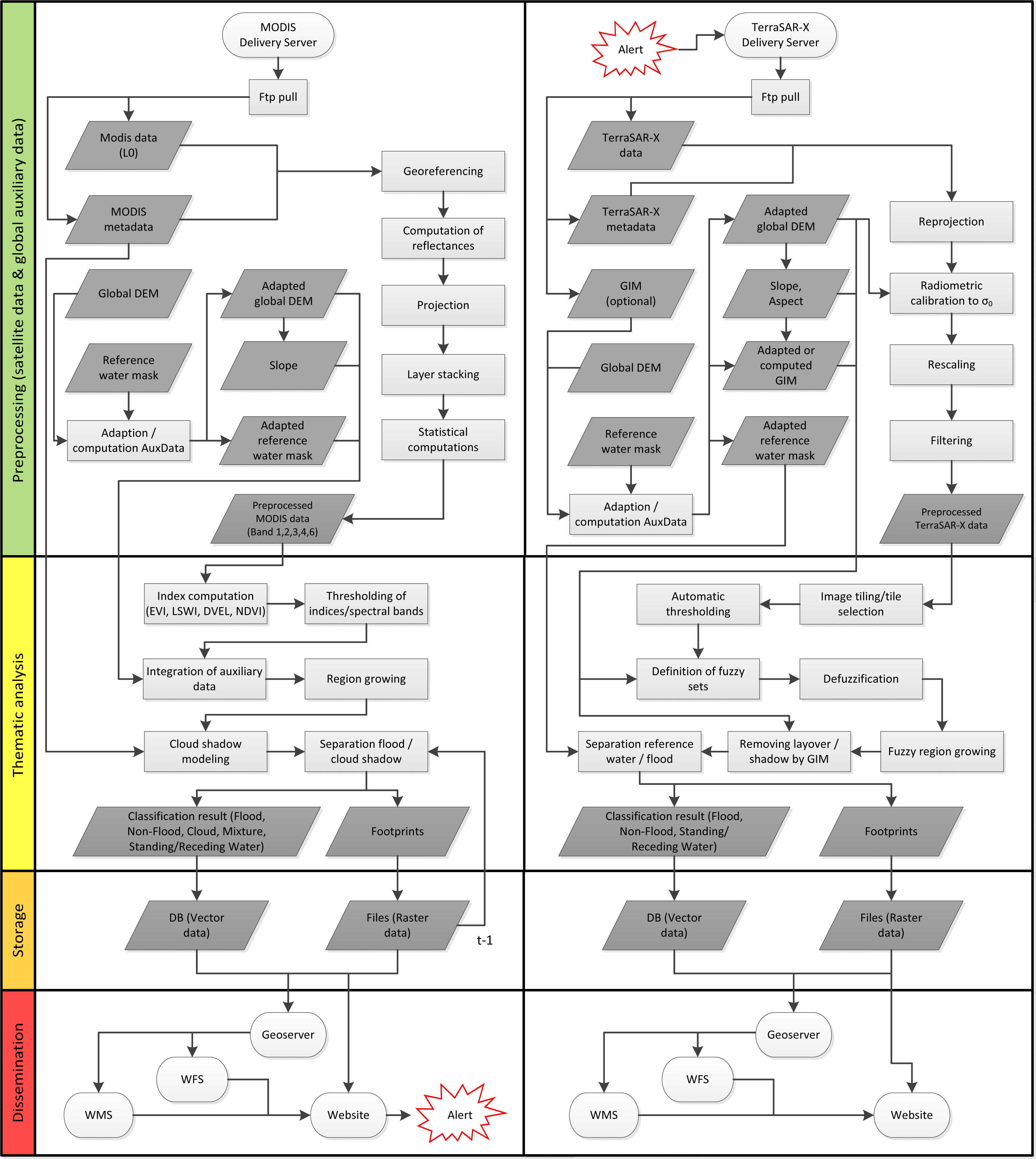
2.1.1. Pre-Processing of MODIS and Auxiliary Data
Level 1A (MOD 01), Level 1B (MOD 02), and Geolocation Datasets (MOD 03)
MODIS Level 2 Corrected Reflectance Product
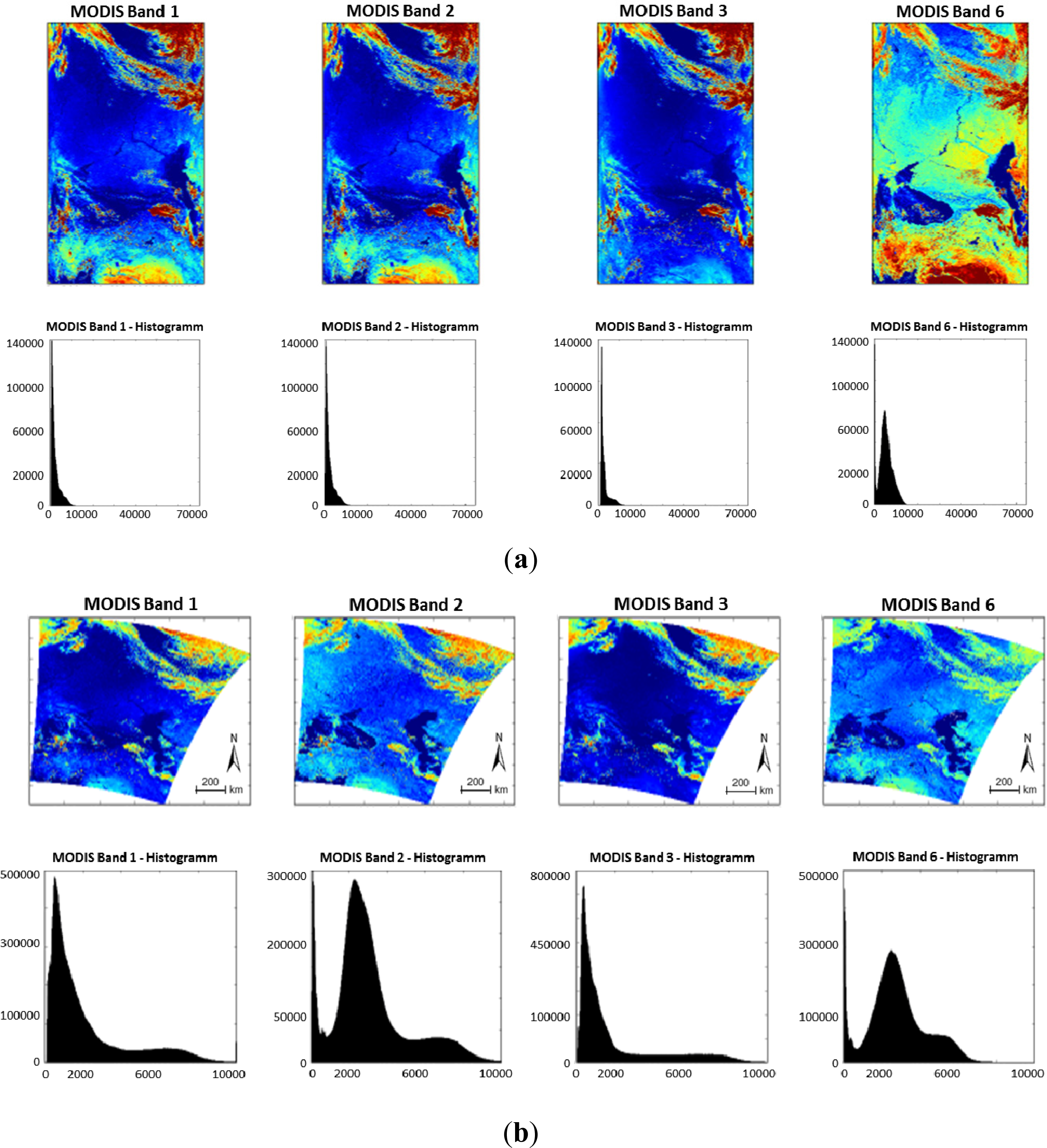
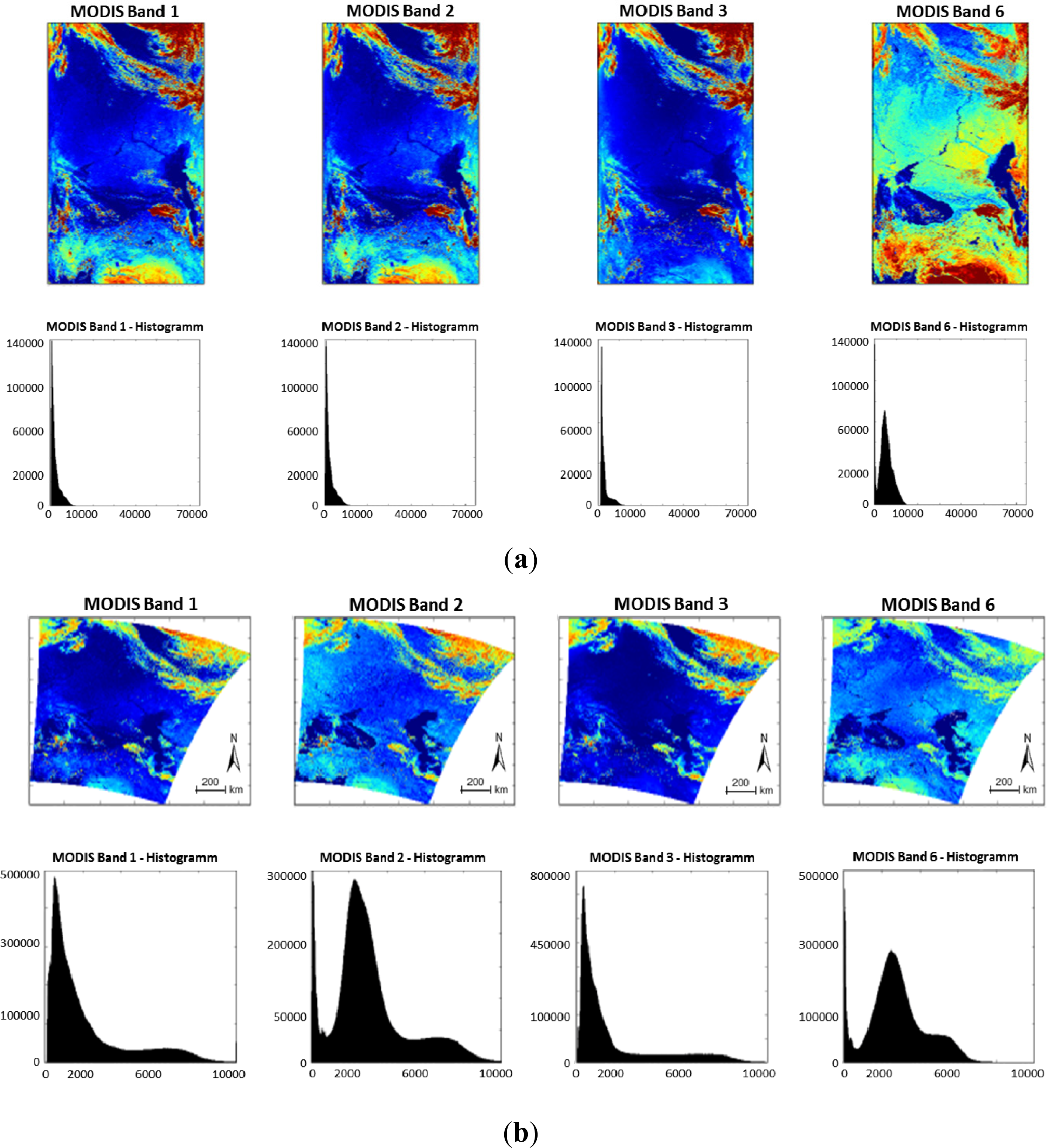
Projection
Post-Processing with GDAL
Auxiliary Datasets
2.1.2. Thematic Analysis
- Computing of spectral indices
- Initial thresholding of the spectral bands and indices
- Post-processing including the integration of auxiliary data
- Region growing
- Improved separation between water and cloud shadows
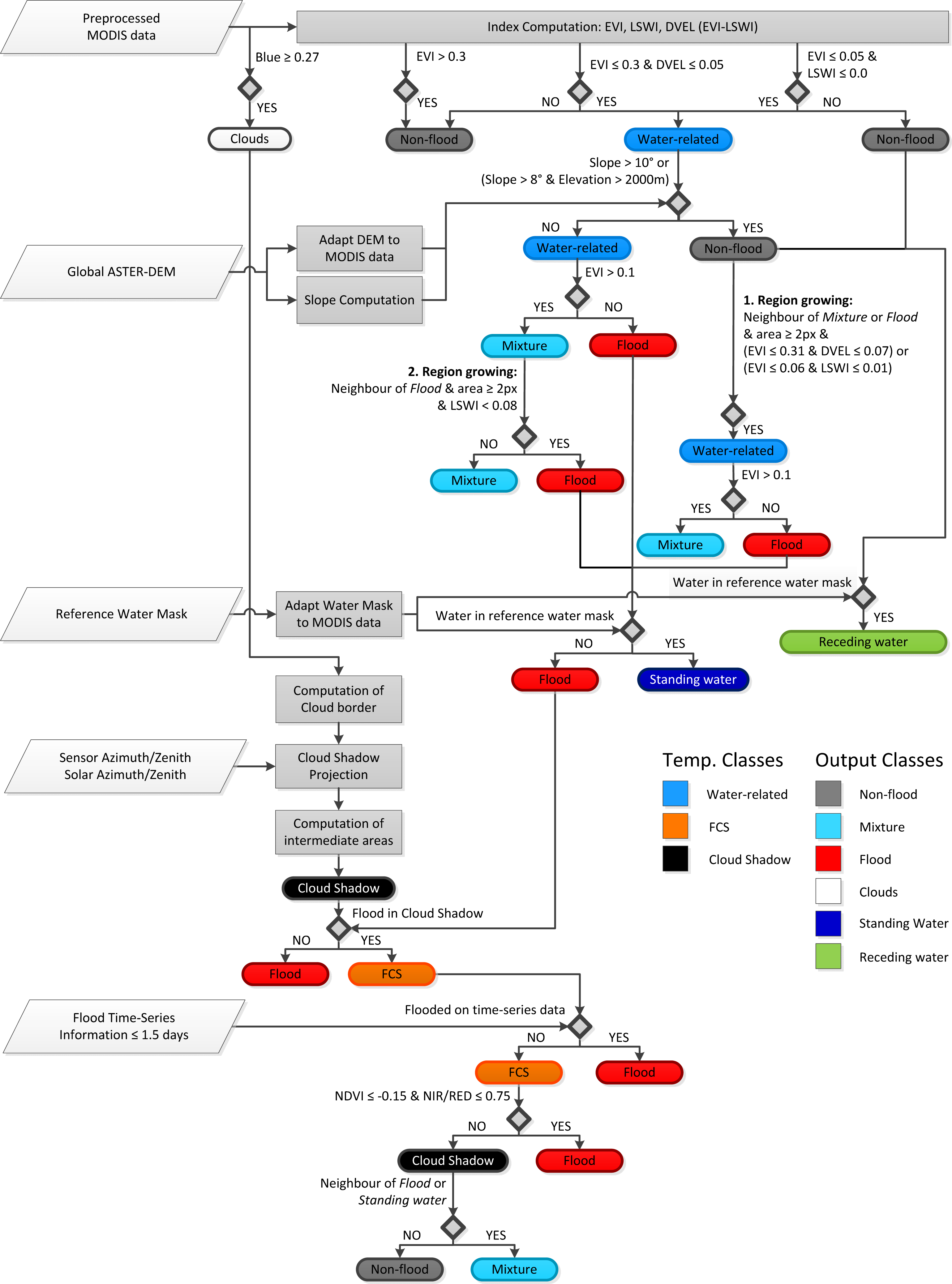
Computing of Spectral Indices
Initial Thresholding of the Spectral Bands and Indices
- Determination of cloud-cover areas based on a threshold of ≥0.27 from the blue reflectance band. The cloud positions are subsequently used for a geometry-based detection of cloud shadows.
- Classification of non-flooded areas by using an EVI >0.3.
- Initial identification of water-related pixels based on the derived indices using two criteria, which combine the EVI (≤0.3) and the DVEL (≤0.05), as well as the EVI (≤0.05) and the LSWI (≤0.0) respectively.
- Separation of water-related areas into flood surfaces (EVI ≤ 0.1) and mixed pixels (0.1 < EVI ≤ 0.3). A mixed pixel denotes a pixel that contains more than one thematic land-cover element of interest, which is a common phenomenon in moderate resolution MODIS data.
Post-Processing Including the Integration of Auxiliary Data
Region Growing
Improved Separation between Water and Cloud Shadows
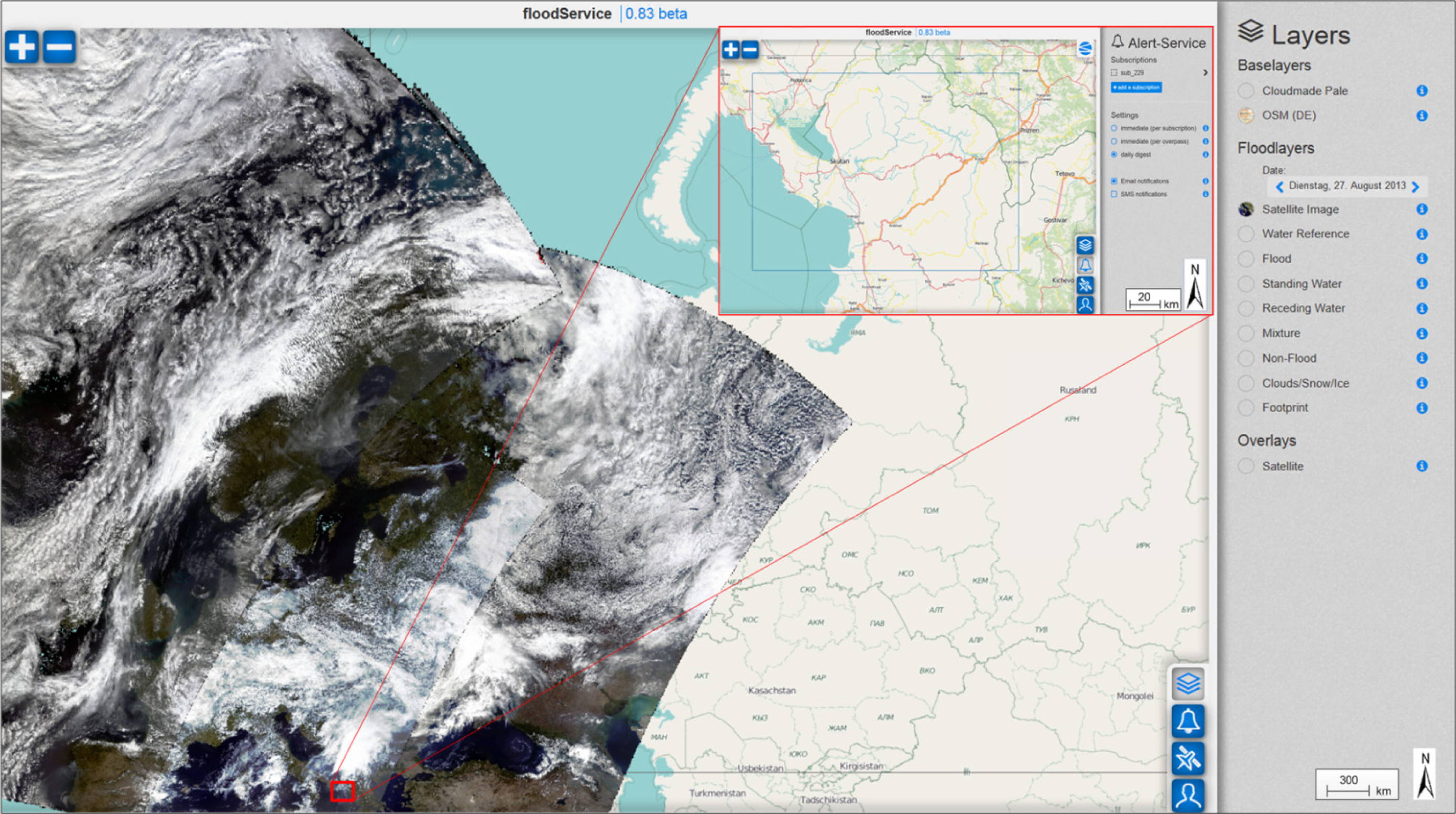
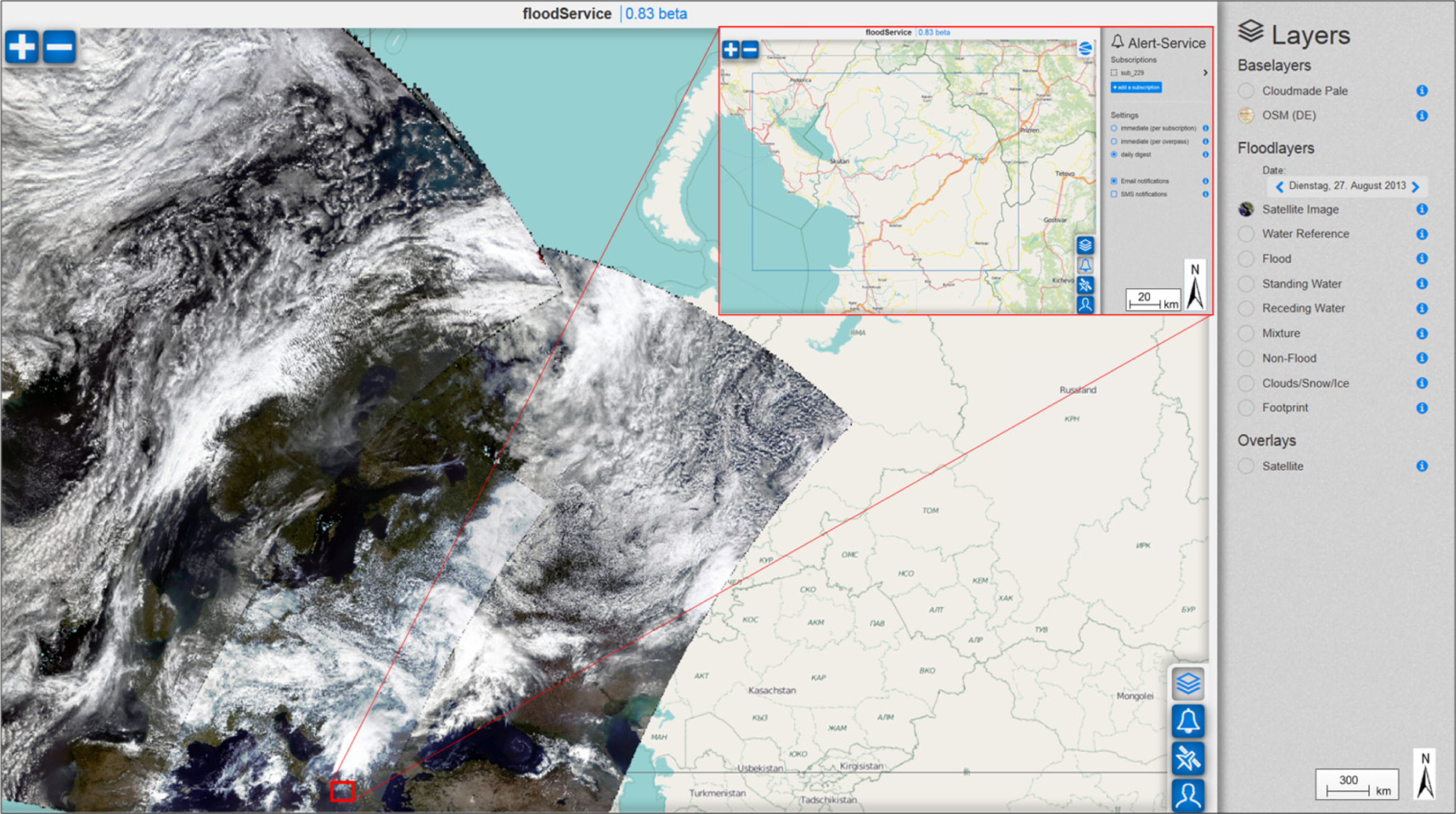
2.1.3. Dissemination of Classification Results
2.2. TerraSAR-X Flood Service
2.2.1. Pre-Processing of TerraSAR-X and Auxiliary Data
2.2.2. Thematic Analysis
Automatic Tile-Based Thresholding
Post-Classification
2.2.3. Dissemination of Classification Results
3. Experimental Results
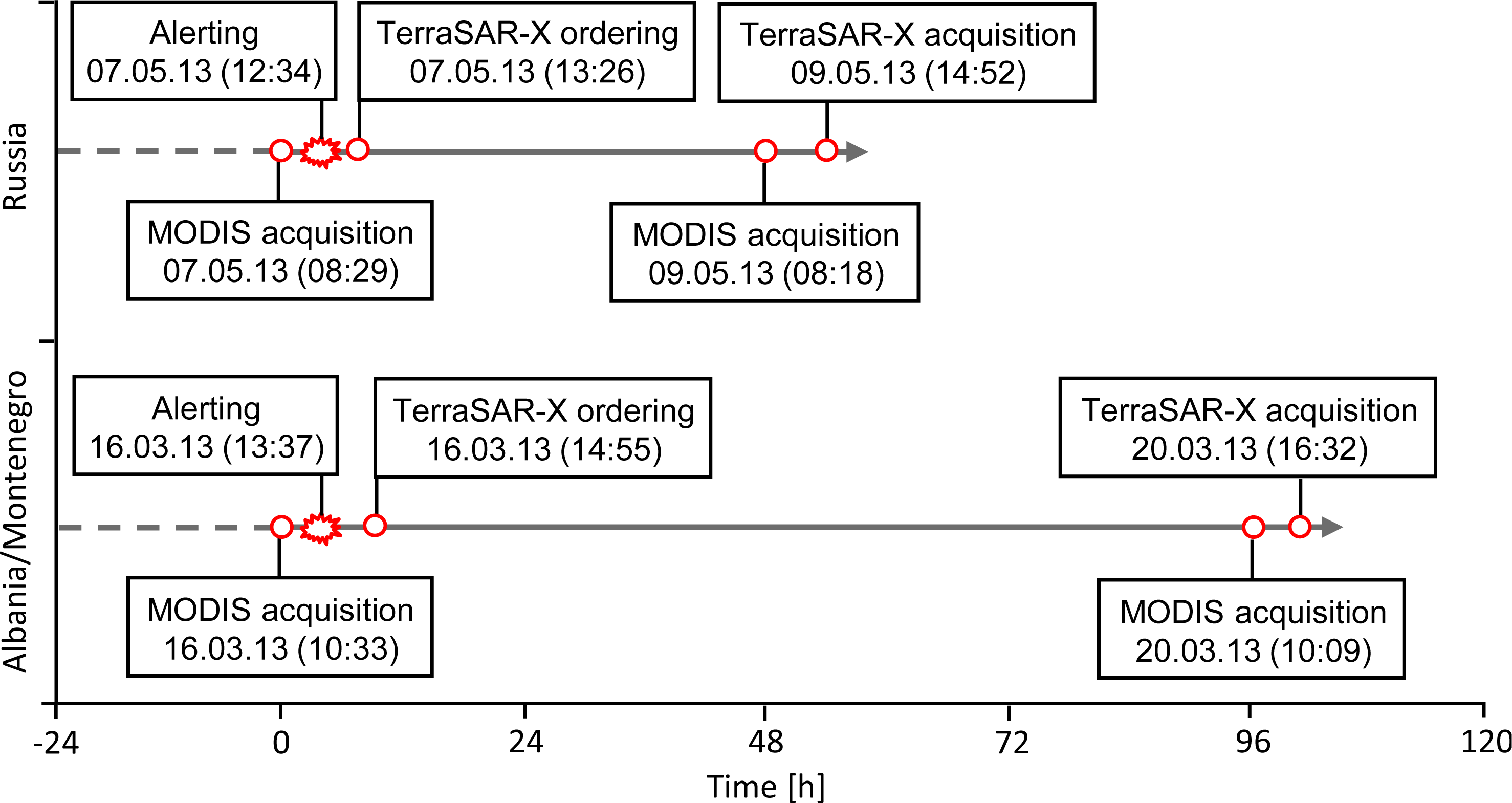
3.1. Study Area and Dataset
3.2. Results and Discussion
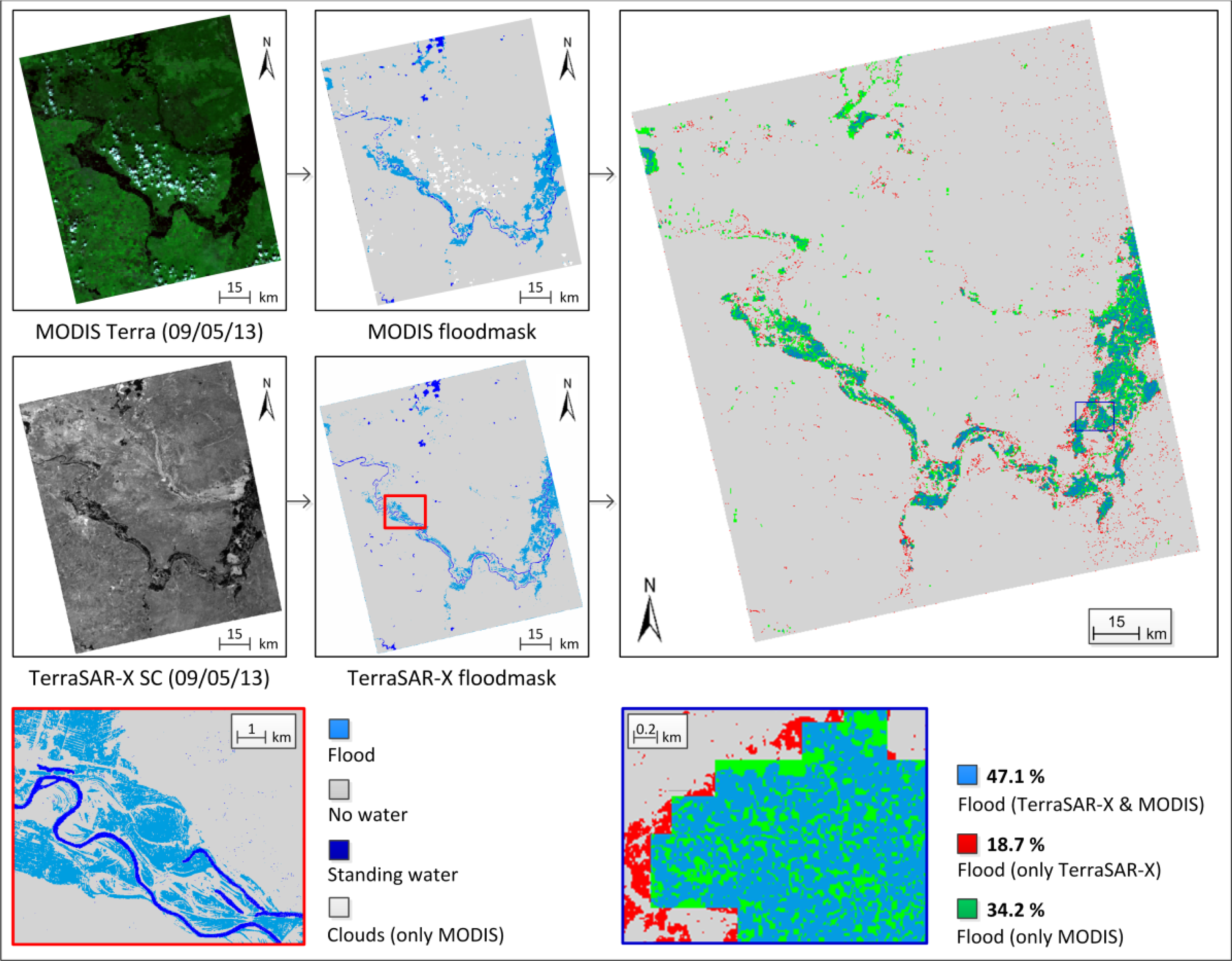
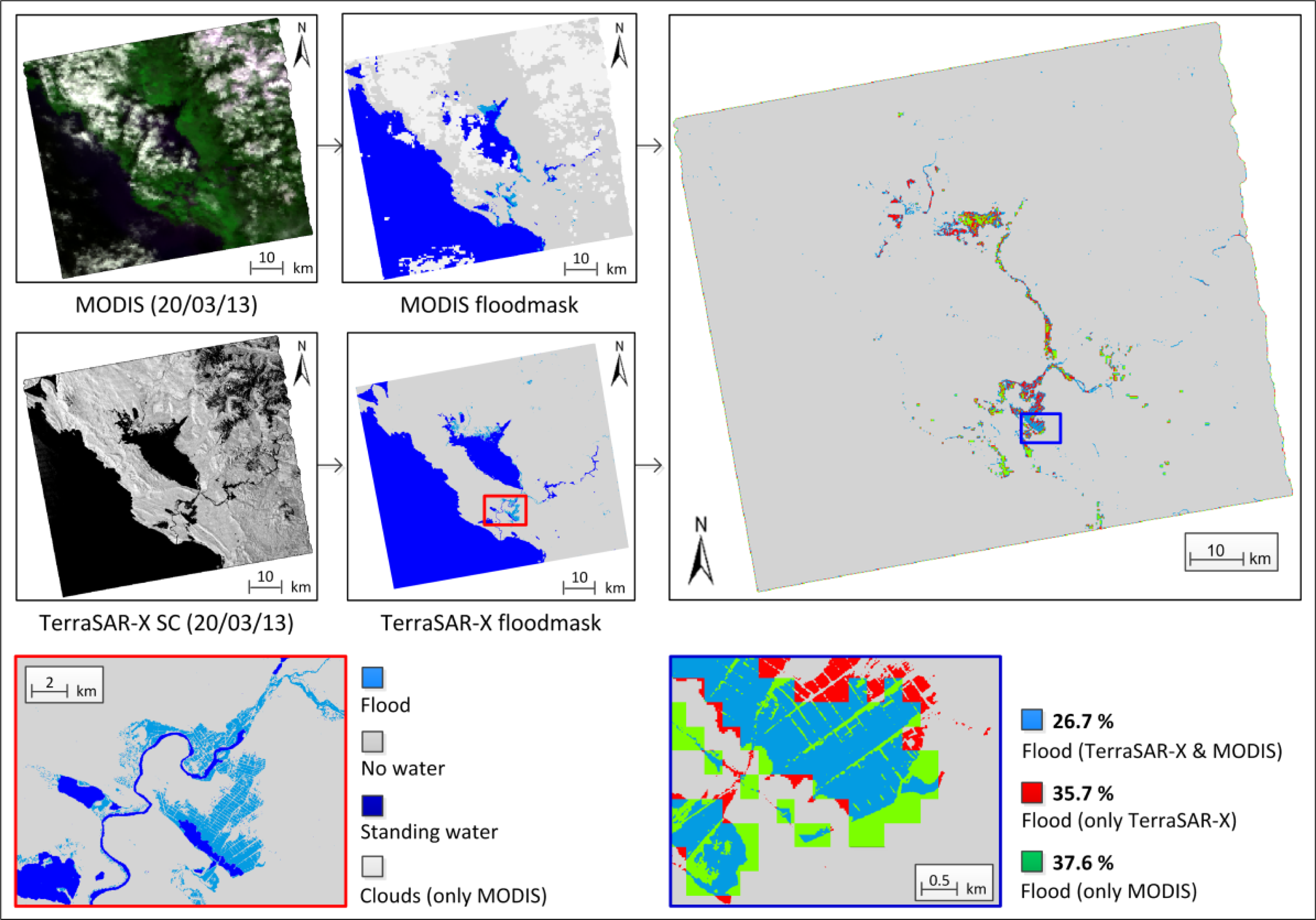
- The flood extent is much smaller for the AOI in Albania/Montenegro. Therefore, MODIS data could only be used for a rough estimation of the actual flood extent. The MODIS derived flood mask is considerably underestimated since mixed areas are very prevalent. In contrast it is possible to derive detailed information about the flooding and to map even small tributaries with an extent lower the spatial resolution of the MODIS images using TerraSAR-X. Therefore, the number of flood pixels identified by TerraSAR-X data only is nearly 17% higher compared to the test site in Russia.
- In comparison to the test area in Russia the cloud coverage at the time of the MODIS acquisition is much higher. Cloud shadows are partly located over flood-affected areas. This leads to an underestimation of the MODIS-derived flood extent due to the reduced spectral separability of water surfaces and cloud shadow areas.
- In the northern part of Lake Scutari in Montenegro, the flooding is extensively covered with vegetation. The X-band SAR signal is very sensitive to flooded vegetation in this region due to the double bounce effect between the water surface and the lower parts of the vegetation. This results in a very high signal return and consequently an underestimation of the flood extent. In contrast the MODIS flood processor is less sensitive to protruding vegetation and is able detect more flood surfaces in this region. This explains the high percentage of flood pixels derived by using the MODIS data (see Figure 7).
4. Conclusion
Acknowledgments
Conflicts of Interest
References
- Giustarini, L.; Hostache, R.; Matgen, P.; Schumann, G.; Bates, P.D.; Mason, D.C. A change detection approach to flood mapping in urban areas using TerraSAR-X. IEEE Trans. Geosci. Remote Sens 2013, 51, 2417–2430. [Google Scholar]
- Martinis, S.; Twele, A.; Voigt, S. Towards operational near-real time flood detection using a split-based automatic thresholding procedure on high resolution TerraSAR-X data. Nat. Hazards Earth Syst. Sci 2009, 9, 303–314. [Google Scholar]
- Martinis, S.; Twele, A. A hierarchical spatio-temporal Markov model for improved flood mapping using multi-temporal X-band SAR data. Remote Sens 2010, 2, 2240–2258. [Google Scholar]
- Mason, D.C.; Davenport, I.J.; Neal, J.C.; Schumann, G.J.-P.; Bates, P.D. Near real-time flood detection in urban and rural areas using high-resolution Synthetic Aperture Radar images. IEEE Trans. Geosci. Remote Sens 2012, 50, 3041–3052. [Google Scholar]
- Matgen, P.; Hostache, R.; Schumann, G.; Pfister, L.; Hoffman, L.; Svanije, H.H.G. Towards an automated SAR based flood monitoring system: Lessons learned from two case studies. Phys. Chem. Earth 2011, 36, 241–252. [Google Scholar]
- Schumann, G.; di Baldassarre, G.; Alsdorf, D.; Bates, P.D. Near real-time flood wave approximation on large rivers from space: Application to the River Po, Italy. Water Resour. Res 2010, 46, 1–8. [Google Scholar]
- Pulvirenti, L.; Chini, M.; Marzano, F.S.; Pierdicca, N.; Mori, S.; Guerriero, L.; Boni, G.; Candela, L. Detection of Floods and Heavy Rain Using Cosmo-SkyMed Data: The Event in Northwestern Italy of November 2011. Proceedings of 2012 IEEE International Geoscience and Remote Sensing Symposium (IGARSS 2012), Munich, Germany, 22–27 July 2012; pp. 3026–3029.
- Pulvirenti, L.; Pierdicca, N.; Chini, M.; Guerriero, L. An algorithm for operational flood mapping from Synthetic Aperture Radar (SAR) data using fuzzy logic. Nat. Hazards Earth Syst. Sci 2011, 11, 529–540. [Google Scholar]
- International Charter of Space and Major Disasters. Available online: http://www.disasterscharter.org/ (accessed on 6 August 2013).
- Dartmouth Flood Observatory. Available online: http://floodobservatory.colorado.edu/ (accessed on 8 August 2013).
- NRT Global MODIS Flood Mapping. Available online: http://oas.gsfc.nasa.gov/floodmap/ (accessed on 10 July 2013).
- ESA Grid Processing on Demand (G-POD). Available online: http://gpod.eo.esa.int/ (accessed on 9 August 2013).
- Westerhoff, R.S.; Kleuskens, M.P.H.; Winsemius, H.C.; Huizinga, H.J.; Brakenridge, G.R.; Bishop, C. Automated global water mapping based on wide-swath orbital synthetic-aperture radar. Hydrol. Earth Syst. Sci 2013, 17, 651–663. [Google Scholar]
- Auynirundronkool, K.; Chen, N.; Peng, C.; Yang, C.; Gong, J.; Silapathong, C. Flood detection and mapping of the Thailand central plain using RADARSAT and MODIS under a sensor web environment. Int. J. Appl. Earth Obs. Geoinf 2012, 14, 245–255. [Google Scholar]
- Mandl, D.; Cappelaere, P.G.; Frye, S.W.; Handy, M.E.; Policelli, F.; Katjizeu, M.; van Langenhove, G.; Aube, G.; Saulnier, J.-F.; Sohlberg, R.; et al. Use of the earth observing one (EO-1) satellite for the namibia SensorWeb flood early warning pilot. Int. J. Appl. Earth Obs. Geoinf 2013, 19, 298–308. [Google Scholar]
- Martinis, S.; Kersten, J.; Twele, A. A fully automated TerraSAR-X based flood service. ISPRS J. Photogramm. Remote Sens. 2013. submitted.. [Google Scholar]
- Eberle, J.; Strobl, C. Web-based geoprocessing and workflow creation for generating and providing remote sensing products. Geomatica 2012, 66, 13–26. [Google Scholar]
- Parkinson, C.L.; Greenstone, R. EOS Data Products Handbook, Volume 2; NASA Goddard Space Flight Center: Greenbelt, MD, USA, 2000. [Google Scholar]
- MacDonald, M.D.; Ruebens, M.; Wang, L.; Franz, B.A. The SeaDAS Processing and Analysis System: SeaWiFS, MODIS, and Beyond. Proceedings of the American Geophysical Union, Fall Meeting, San Francisco, CA, USA, 5–9 December 2005.
- Goddard Space Flight Center. MODIS Level 2 Corrected Reflectance Science Processing Algorithm (CREFL_SPA) User’s Guide; Version 1.7.1. 2010. Available online: http://directreadout.sci.gsfc.nasa.gov/links/rsd_eosdb/PDF/CREFL_1.7.1_SPA_1.1.pdf (accessed on 1 August 2013).
- Land Processes DAAC. MODIS Reprojection Tool Swath User Manual; Release 2.2; Land Process Distributed Active Archive Center, USGS Earth Resources Observation and Science (EROS) Center: Sioux Falls, SD, USA, 2010; Available online: https://lpdaac.usgs.gov/sites/default/files/public/MRTSwath_Users_Manual_2.2_Dec2010.pdf (accessed on 1 August 2013).
- Carroll, M.; Townshend, J.; DiMiceli, C.; Noojipady, P.; Sohlberg, R. A new global raster water mask at 250 meter resolution. Int. J. Digit. Earth 2009, 2, 291–308. [Google Scholar]
- De Groeve, T.; Vernaccini, L.; Brakenridge, G.R.; Adler, R.; Ricko, M.; Wu, H.; Thielen, J.; Salamon, P.; Policelli, F.S.; Slayback, D.; et al. JRC Technical Reports: Global Integrated Flood Map; JRC80255; Publications Office of the European Union: Luxembourg, 2013. [Google Scholar]
- Aster GDEM V2. Available online: https://lpdaac.usgs.gov/get_data(accessed on 8 April 2013).
- Jähne, B.; Scharr, H.; Körkel, S. Principles of Filter Design. In Handbook of Computer Vision and Applications; Academic Press: London, UK, 1999. [Google Scholar]
- Sakamoto, T.; Nguyen, N.V.; Kotera, A.; Ohno, H.; Ishitsuka, N.; Yokozawa, M. Detecting temporal changes in the extent of annual flooding within the Cambodia and the Vietnamese Mekong Delta from MODIS time-series imagery. Remote Sens. Environ 2007, 109, 366–374. [Google Scholar]
- Islam, A.S.; Bala, S.K.; Haque, M.A. Flood inundation map of Bangladesh using MODIS time-series images. J. Flood Risk Manag 2010, 3, 210–222. [Google Scholar]
- Yan, Y.-E.; Ouyang, Z.-T.; Guo, H.-Q.; Jin, S.-S.; Zhao, B. Detecting the spatiotemporal changes of tidal flood in the estuarine wetland by using MODIS time series data. J. Hydrol 2010, 384, 156–163. [Google Scholar]
- Huete, A.R.; Liu, H.Q.; Batchily, K.; van Leeuwen, W. A comparison of vegetation indices global set of TM images for EOS-MODIS. Remote Sens. Environ 1997, 59, 440–451. [Google Scholar]
- Huete, A.R.; Didan, K.; Miura, T.; Rodriguez, E.P.; Gao, X.; Ferreira, L.G. Overview of the radiometric and biophysical performance of the MODIS vegetation indices. Remote Sens. Environ 2002, 83, 195–213. [Google Scholar]
- Zhang, R.; Sun, D.; Li, S.; Yu, Y. A stepwise cloud shadow detection approach combining geometry determination and SVM classification for MODIS data. Int. J. Remote Sens 2013, 34, 211–226. [Google Scholar]
- Li, S.; Sun, D.; Yu, Y. Automatic cloud-shadow removal from flood/standing water maps using MSG/SEVIRI imagery. Int. J. Remote Sens 2013, 34, 5487–5502. [Google Scholar]
- Luo, Y.; Trishchenko, A.P.; Khlopenkov, K.V. Developing clear-sky, cloud and cloud shadow mask for producing clear-sky composites at 250-meter spatial resolution for the seven MODIS land bands over Canada and North America. Remote Sens. Environ 2008, 112, 4167–4185. [Google Scholar]
- Simpson, J.J.; Jin, Z.H.; Stitt, J.R. Cloud shadow detection under arbitrary viewing and illumination conditions. IEEE Trans. Geosci. Remote Sens 2000, 38, 972–976. [Google Scholar]
- Hutchinson, K.D.; Mahoney, R.L.; Vermote, E.F.; Kopp, T.J.; Jackson, J.M.; Sei, A.; Iisager, B.D. A geometry-based approach to identifying cloud shadows in the VIIRS cloud mask algorithm for NPOESS. J. Atmos. Ocean. Technol 2009, 26, 1388–1397. [Google Scholar]
- Kuenzer, C.; Guo, H.; Schlegel, I.; Tuan, V.Q.; Li, X.; Dech, S. Varying scale and capability of envisat ASAR-WSM, TerraSAR-X Scansar and TerraSAR-X Stripmap data to assess urban flood situations: A case study of the Mekong delta in Can Tho province. Remote Sens. 2013, 5. [Google Scholar]
- Infoterra. Radiometric Calibration of TerraSAR-X Data; Infoterra GmbH: Friedrichshafen, Germany, 2008; Available online: http://www.astrium-geo.com/files/pmedia/public/r465_9_tsxx-itd-tn-0049-radiometric_calculations_i1.00.pdf (accessed on 29 July 2013).
- SWBD. Shuttle Radar Topography Mission Water Body Data Set. 2005. Available online: http://dds.cr.usgs.gov/srtm/version2_1/SWBD/ (accessed on 28 August 2013).
- Kittler, J.; Illingworth, J. Minimum error thresholding. Pattern Recognit 1986, 19, 41–47. [Google Scholar]
- Beven, K.J.; Kirkby, M.J. A physically based, variable contributing area model of basin hydrology. Hydrol. Sci. Bull 1979, 24, 43–69. [Google Scholar]
- Rennó, C.D.; Nobre, A.D.; Cuartas, L.A.; Soares, J.V.; Hodnett, M.G.; Tomasella, J.; Waterloo, M.J. HAND, a new terrain descriptor using SRTM-DEM: Mapping terra-firme rainforest environments in Amazonia. Remote Sens. Environ 2008, 112, 3469–3481. [Google Scholar]
- Wendleder, A.; Wessel, B.; Roth, A.; Breunig, M.; Martin, K.; Wagenbrenner, S. TanDEM-X water indication mask: Generation and first evaluation results. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens 2013, 6, 171–179. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Band | Bandwidth (nm) | Resolution (m) | Primary Use |
|---|---|---|---|
| 1 (ρRED) | 620–670 | 250 | Absolute Land Cover Transformation, Chlorophyll |
| 2 (ρNIR) | 841–876 | 250 | Cloud Amount, Vegetation Land Cover Transformation |
| 3 (ρBLUE) | 459–479 | 500 | Soil/Vegetation Differences |
| 4 (ρGREEN) | 545–565 | 500 | Green Vegetation |
| 6 (ρSWIR) | 1628–1652 | 500 | Snow/Cloud Differences |
© 2013 by the authors; licensee MDPI, Basel, Switzerland This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license ( http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Martinis, S.; Twele, A.; Strobl, C.; Kersten, J.; Stein, E. A Multi-Scale Flood Monitoring System Based on Fully Automatic MODIS and TerraSAR-X Processing Chains. Remote Sens. 2013, 5, 5598-5619. https://doi.org/10.3390/rs5115598
Martinis S, Twele A, Strobl C, Kersten J, Stein E. A Multi-Scale Flood Monitoring System Based on Fully Automatic MODIS and TerraSAR-X Processing Chains. Remote Sensing. 2013; 5(11):5598-5619. https://doi.org/10.3390/rs5115598
Chicago/Turabian StyleMartinis, Sandro, André Twele, Christian Strobl, Jens Kersten, and Enrico Stein. 2013. "A Multi-Scale Flood Monitoring System Based on Fully Automatic MODIS and TerraSAR-X Processing Chains" Remote Sensing 5, no. 11: 5598-5619. https://doi.org/10.3390/rs5115598
APA StyleMartinis, S., Twele, A., Strobl, C., Kersten, J., & Stein, E. (2013). A Multi-Scale Flood Monitoring System Based on Fully Automatic MODIS and TerraSAR-X Processing Chains. Remote Sensing, 5(11), 5598-5619. https://doi.org/10.3390/rs5115598