1. Introduction
Light detection and ranging (LiDAR), irrespective of the type of platform (terrestrial, airborne, or spaceborne), has allowed the quantification of the 3D structure of forest canopies in a cost-effective, rapid, and accurate manner [
1]. Applications of these remotely sensed data range between forest inventory, ecosystem functions,
i.e., carbon and water cycling, microclimate regulation [
2], and habitat suitability studies [
3,
4]. LiDAR datasets provide the means to evaluate one of the most labor intensive forested ecosystem components, the three-dimensional forest structure [
5], with much reduced effort and cost compared with ground-based measurements. Detection of small changes in the mid-story levels of the canopy provide an effective tool in forest management and fire behavior modeling [
6,
7].
Some of the initial challenges and limitations in the use of LiDAR for forest inventory applications have centered on the specialized expertise needed for data processing, the reliability of extracted canopy structural metrics, and the initial hardware cost [
8]. As more off-the-shelf software products have become available and a large range of validation studies have demonstrated the correspondence of extracted canopy metrics to field data [
6,
9,
10,
11], the use of LiDAR, especially the airborne platform systems, has entered the commercial arena.
The variety of available sensors, particularly airborne ones, has made the use of this new technology attractive, but sometimes difficult to understand by users in the forestry community. The type of platform used for these airborne laser sensors is an important factor to take into account when selecting the most appropriate remote sensing technique for a study. The combination of footprint, return type (discrete versus waveform), and scale of interest (from individual tree to stand level, small to large landscape scale) should all be carefully considered when selecting the appropriate sensor and platform.
Airborne LiDAR sensors are the most commonly available today, and discrete return sensors are usually used for forest inventory studies [
12], particularly when taking the cost-effectiveness at the plot to landscape level scale into account. Full waveform airborne sensors, initially only developed for research purposes by NASA,
i.e., the SLICER [
13,
14] and LVIS [
15], are now commercially available for forestry applications as well [
16,
17]. Well known limitations of airborne LiDAR include the systematic underestimation of the canopy height at both the plot and stand scales [
9,
18], due to the low likelihood that the beam hits the tree tops. Additionally, validating LiDAR tree height with field data can be challenging due to temporal and spatial scale differences of acquisition [
12,
19,
20]. Finally, the cost of many of the units is another limitation that, in recent years, is slowly disappearing: while the powerful research laser scanners (SLICER and LVIS) have remained at or above the million dollar range, and commercial units, designed for accurate Digital Elevation Model (DEM) creation with costs around still hundreds of thousands of dollars, new cost-effective portable airborne sensors have been in development and testing phases for almost a decade [
8].
Another platform of sensors, spaceborne LiDAR, is much more limited, especially for forestry applications. The ICESat satellite has the geoscience laser altimeter system (GLAS) mounted, and this sensor, up to 2009, when turned off, could provide a very large-footprint (>60 m) long-term dataset as a full waveform [
21]. The limitation of this platform was that the large footprint of the current available sensor does not allow detailed forest structure to be extracted, and it even proved to be challenging to estimate accurate tree heights [
12].
Most of the available terrestrial-based laser sensors fit within the terrestrial laser scanning (TLS) category, instruments that emit a high spatial density of light beams from a stationary location, rotating around its axes, in order to provide a detailed 3D point cloud dataset [
22,
23,
24]]. The application of TLS systems has focused on the reconstruction of the detailed forest architecture at a small plot or even individual tree scale: providing accurate tree volume or leaf area estimates [
25,
26], defining plant area density profiles for agricultural and natural lands [
1,
23,
27,
28], and evaluating stem and branch morphology [
29]. The benefits of TLS include the high level detail capacity to map 3D surfaces in a reproducible and unequivocal manner [
12,
25], avoiding the destructive and cost- and time-intensive field methods [
30]. Forest metrics—volume, tree height, stem location, diameter, and density—derived from ground-based scanning systems have been successfully validated with field measures at the plot scale [
24]. Canopy gap detection, ecologically significant for modeling species habitats and succession changes, has been semi-automated by the use of TLS [
23]. Repeated measures of TLS allow growth and other structural changes to be easily detected (
i.e., shrub encroachment, fuel loading [
31], and disturbance events), which are crucial applications in forestry management.
Compared to airborne sensors, terrestrial laser scanning is limited by the short functional range [
10], the high cost of the acquisition and processing [
32], and the lack of characterization of the upper canopy layers [
33,
34]. Unlike airborne sensors, terrestrial-based ones were not designed to provide structural assessments over large spatial scales or difficult to access terrain. The strengths of any bottom-up sensors, such as TLS or the one presented in this study, a portable ground-based system [
35], lie in their sensitivity to lower canopy levels, potentially missed by airborne systems [
33,
34,
36]. The enhanced ability to detect mid-structural components, in addition to the relatively low upfront cost of acquiring a system, place portable sensors in an ideal category for plot level forest management.
This study further explores the use of an affordable system, first presented by Parker
et al. [
35], and modified further for portability and consistency in difficult terrain (forested areas with significant shrub encroachment) in a managed forest setting. The high-speed, commercially purchased laser rangefinder allows the capture of a high sample size, previously a limitation when estimating canopy structure and leaf area densities [
37] from ground-based methods. Other strengths of this system are in the retrieval of a higher level detailed assessment of lower canopy structure [
34], and rapid assessment of forest structure [
35]. The particular strengths of a portable system, especially the potential of identifying small differences in shrub and mid-structure levels inexpensively, are advantageous to the timely evaluation of different resource management prescriptions.
The objective of this study was twofold: (1) to provide a better understanding of the canopy structure metrics and profiles of the portable LiDAR system and how these relate to discrete return airborne LiDAR data and (2) to apply the use of the portable LiDAR system to detecting differences in the 3D canopy structure of different fire managed forest plots.
2. Methodology
2.1. Study Area
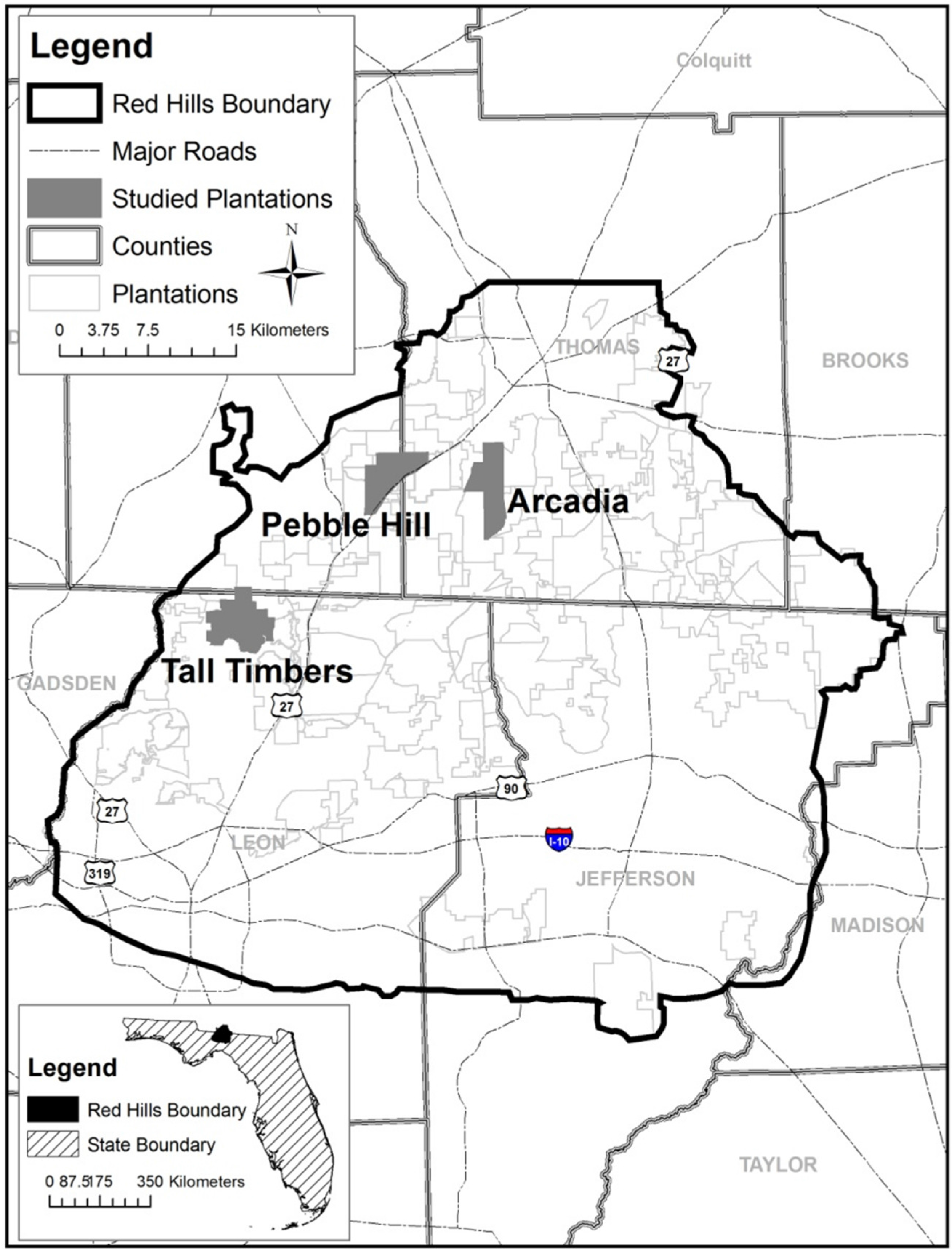
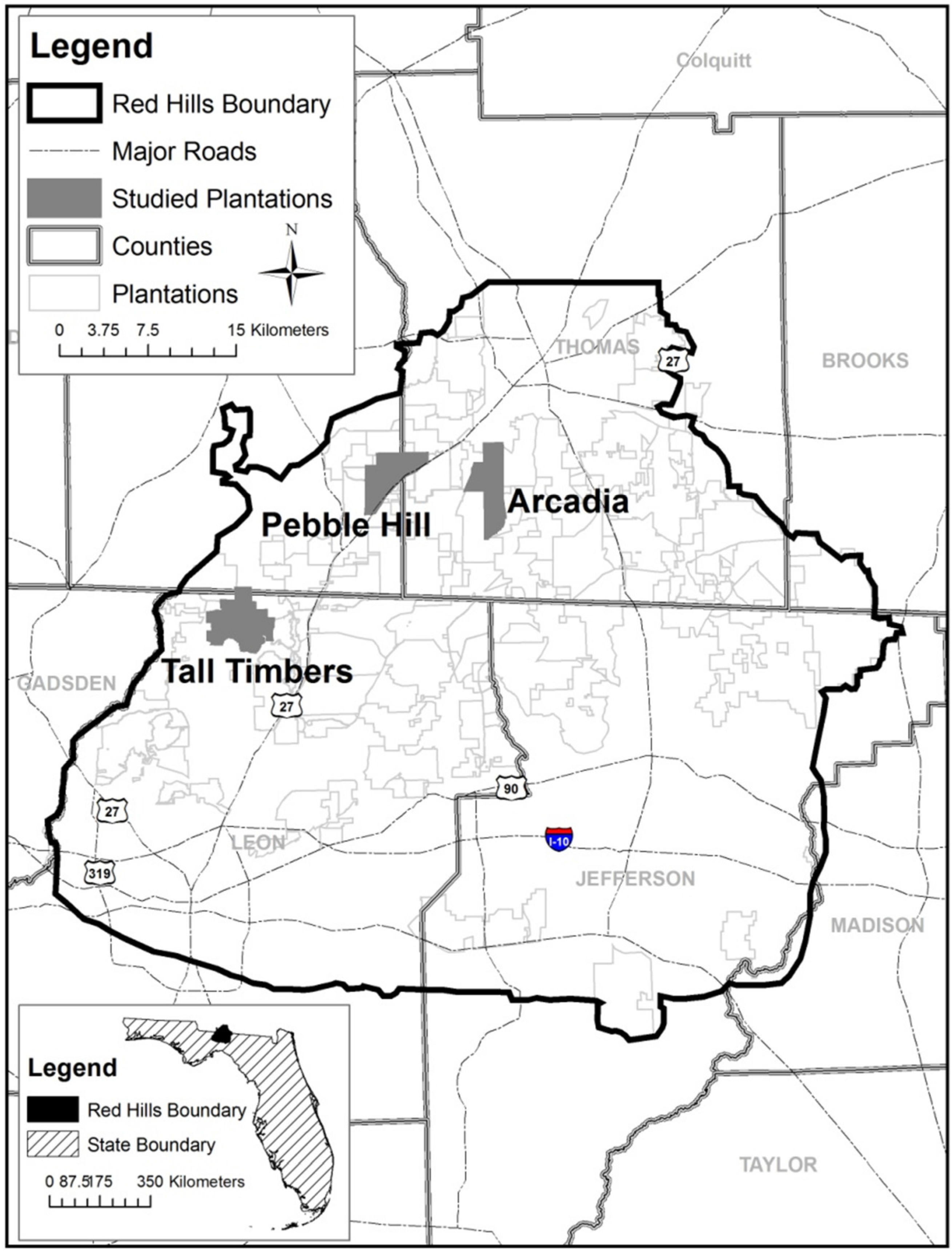
This study focused on the Red Hills area of the northwestern Florida and southwestern Georgia (
Figure 1). This region occupies approximately 300,000 ha between Thomasville, Georgia and Tallahassee, Florida and is home to over 85 threatened and endangered plant and animal species (K. McGorty, unpublished data). The Red Hills area is comprised of a mixture of young and old growth longleaf pine forests, natural and planted loblolly (
Pinus taeda) and shortleaf (
Pinus echinata) pine forests primarily in an old field context, mixed hardwood and pine forests, forested and herbaceous wetlands, agricultural fields, and residential/urban land cover types .
Figure 1.
Location of Tall Timbers Research Station (TTRS), Pebble Hill, and Arcadia plantations within the Red Hills area.
Figure 1.
Location of Tall Timbers Research Station (TTRS), Pebble Hill, and Arcadia plantations within the Red Hills area.
Three sites within the Red Hills area were selected for this study, the Tall Timbers Research Station (TTRS), the Pebble Hill Plantation (PB) and Wade Tract at Arcadia Plantation (ARC). The first objective of the study, the comparison of the portable and airborne LiDAR structural results, took place at TTRS, a research forest located on the historic Beadel plantation in north Florida. The second objective, the application of portable LiDAR metrics and profiles to understand the effects of fire management strategies on forest canopy structure, added six additional plots located at the Pebble Hill and Arcadia Plantations, located in Georgia.
The Tall Timbers Research Station (TTRS) covers 1,600 ha within the Red Hills area, and is located just north of Tallahassee, FL. The upland pine ecosystems at TTRS, which until 1895 were dominated by pristine longleaf pine savannah uplands, have been highly disturbed by agriculture, and are dominated by a mixed canopy of loblolly pine (
Pinus taeda), shortleaf (
Pinus echinata) and longleaf (
Pinus palustris) [
38]. The groundcover at the study site is dominated by many legumes and composite family members and interspersed with grasses (broomsedge bluestem,
Andropogon virginicus, primarily), but lacking the wiregrass (
Aristida beyrichiana) typical of pristine longleaf pine savanna ecosystems [
39].
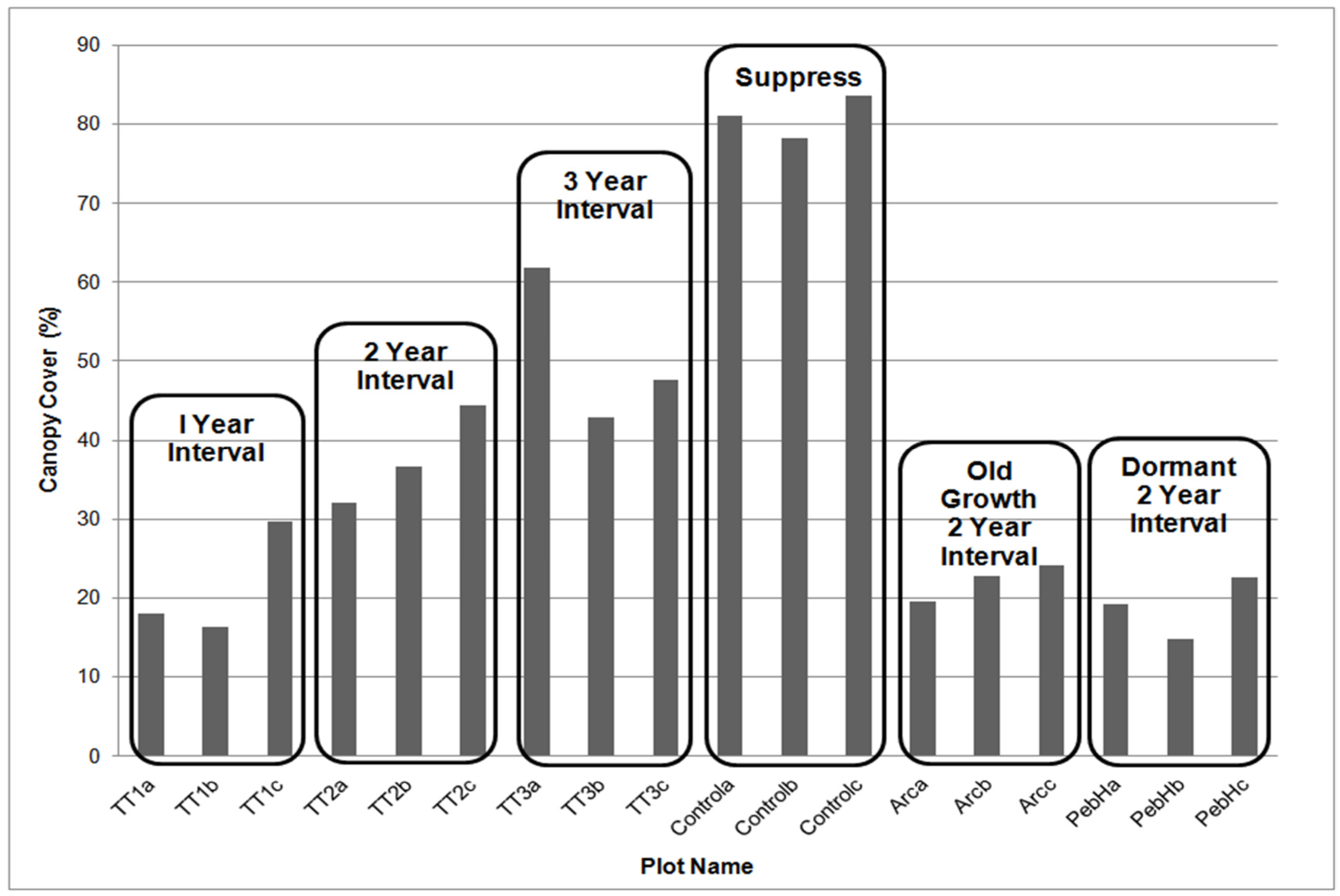
The first objective of this study specifically targeted the Stoddard Fire plots (managed since 1959) located throughout the central upland areas of TTRS (
Figure 1). The 12 Stoddard fire plots and an additional three control plots are each 45 by 45 m (0.2 ha) and were strategically placed to represent a variety of soil types. There are replicates (designated a, b, and c) for each of the four fire return intervals applied: TT1, TT2, TT3, and TT4 correspond to 1-yr, 2-yr, 3-yr and 4-yr fire return interval treatments. All control plots have been fire suppressed since at least 1967, with two replicates suppressed since 1959. All the treated plots were burned using low intensity fires during the transitional season (between the dormant and growing season or March–April) at their dedicated fire rotation for 50 consecutive years. The only treated plots out of rotation for a period of time were the 4-yr fire return interval Stoddard plots. These latter plots were treated as 2-yr fire return interval plots during the 1999–2007 period. Due to the alteration of the treatment rotation of the 4-yr fire return interval plots, these were excluded from the portable LiDAR data collection. A total of 9 Stoddard treatment plots and 3 additional control plots had data collected using both airborne and portable LiDAR sensors.
For the second objective of the study, detecting differences across differently managed forests/plots, six plots similar in size (0.2 ha) to the Stoddard fire plots, were randomly placed throughout Pebble Hill (PebH plots) and Wade Tract in Arcadia Plantation (Arc plots) (
Figure 1). Pebble Hill consists of 1,200 ha of secondary growth mixed upland forest located in Thomasville, Georgia. Prior to the Civil War, Pebble Hill was a cotton plantation, and was converted back to Coastal Plain upland forest cover, with patches of plantation, in the early 1900s and it is currently maintained using a 2-yr late dormant season fire cycle. The Wade Tract Preserve is an 85 ha research plot located within the private hunting Arcadia Plantation estate (1,260 ha) in Thomasville, Georgia (
Figure 1). The Wade Tract is one of the few remaining old-growth longleaf pine stands in southeastern Coastal Plain, and is now managed under a conservation easement by TTRS using a 2-yr growing season fire cycle.
2.2. Airborne LiDAR Data
A small footprint multiple return LiDAR (Light Imaging and Ranging) dataset, collected by Merrick & Co using a Leica ALS50 Geosystem was obtained from the Tallahassee-Leon County Geographic Information Systems (TLGIS) Department. The output beam divergence of this discrete return airborne sensor is 0.22 milliradion at 1/e2. This dataset included raw 1.1 format LAS files and was flown in the 2008 transitional season (March 2008) with the goal of creating countywide detailed floodplain mapping. The mean and minimum point spacing of this LiDAR data were 1.55 and 1.19 m, respectively. This dataset covered approximately one third of the Red Hills area (105,000 ha), but excluded the Arcadia and Pebble Hill Plantations.
The obtained point cloud included specified multiple return numbers and class types in accordance with the 1.1 LAS format specifications. Pre-processing was performed by the vendor, Merrick & Co, using proprietary tools. The 2008, airborne LiDAR dataset selected for this research study was collected by TLGIS 2 years after the portable LiDAR data collection, and it is the closest available dataset to the portable LiDAR data.
The point cloud data were converted to multipoint files (all, ground points only, and canopy points only), and then interpolated in the 3D Analyst GIS environment to a Digital Elevation Model (DEM) and a Digital Surface Model (DSM) [
5]. For the DEM, an Inverse Distance Squared Weighted (IDSW) Interpolation of ground points only were used, whereas for the DSM all first returns were interpolated in the same manner. After the construction of the DEM using an IDSW of ground returns, the Digital Canopy Height model was extracted from the difference between the DSM and the DEM. All IDSW interpolations were performed with a variable search of up to 12 neighbors and a 1 m grid output size (instead of a much smaller 0.2 m grid used by [
5]). Post processing of all the raster products took place to fill most empty cells with nearby interpolated values. The DEM heights were assigned to all point cloud data, allowing the computation of height above ground for every data point.
A personal ESRI ArcGIS geodatabase was created to manage and streamline all the spatial data layers relating to the Stoddard fire treatment plots in one location. Boundaries for each of the Stoddard plot were collected using a sub-meter GPS and a 5 meter buffer was added. The airborne LiDAR point cloud data were extracted for each of the Stoddard plots using the expanded boundary (buffered). The use of a buffered boundary for LiDAR extraction provided greater certainty that none of the field data collection (i.e., overhanging canopies) was outside of the analyzed LiDAR data.
2.3. Portable LiDAR Data
Portable LiDAR data were collected in March–April 2006 for all 18 plots (12 at TTRS, 3 each at PB and WT) using a Riegl LD90-3100 HS eye-safe (laser safety class I) first-return type rangefinder operating at 890 nm and 1 kHz, connected to a lightweight Toughbook and placed in a lightweight backpack with homebuilt frame. The beam divergence of this profiling system is consistent with the manufacturer’s specifications at 2.0 milliradion [
35]. This is a very similar setup to the one used by Parker
et al. [
35], with frame modifications for greater portability (
Figure 2). The system was suspended in an adjustable frame installed to minimize tilting of the system, but the whole system was fixed and not gimballing. Even though the verticality of the laser was assessed prior to each plot data collection, tilting is a potential source of error, especially with the instrument mounted as a backpack. This Riegl rangefinger averages a minimum of five ranges together to give one measurement, and presents “sky hits” (open canopy) as an error, allowing for easy accounting of open canopy returns.
Since the portable LiDAR system does not collect x and y positional information, evenly spaced transects across all the field plots were predetermined in ArcGIS, and a Trimble GeoXT (submeter) unit was used in conjunction with the portable unit for LiDAR data collection. The maximum distance between these transects was 4 m, and this corresponds to the maximum spacing between returns. Within the acquired transects, point spacing is minuscule in this type of continuously profiling system. Adding GPS tagging (x and y positions) would further enhance the data collection and allow exact point spacing to be calculated.
The data are recorded in a ASCII text file format using a serial data connection, and appropriately labeled for each plot. Since the assumption of constant walking speed is important to be able to assign positional accuracy, the portable LiDAR system was redesigned from the one used by Parker
et al. [
35] to include a on/off switch. This allows the data collection to be paused temporarily and resumed when there are difficult field conditions, such as heavy understory cover and impassible ditches. Even with the use of the switch, maintaining constant speed and/or trajectory within a predetermined transect are difficult, and applications of this type of data should not depend on positional accuracy. Small movements in direction or position of the collector could change the exact target of the laser. However, since xyz are not used for individually collected data points and analysis is based on the aggregation of all points per plot, these potential small changes in target should not have an impact on plot level studies.
Figure 2.
Portable light detection and ranging (LiDAR) unit in the backpack frame.
Figure 2.
Portable light detection and ranging (LiDAR) unit in the backpack frame.
2.4. Field Data Collection of Stoddard Plots
Canopy cover and an annual basal area were collected for all 12 Stoddard fire plots starting in 2004. These plots were sampled on April, August, October, and December 2004, all months of 2005, January–March 2006, and April 2010. For comparison with the portable LiDAR data, the 2006 collected data were used, since these are synchronous (within 2 months) to the portable LiDAR data collection.
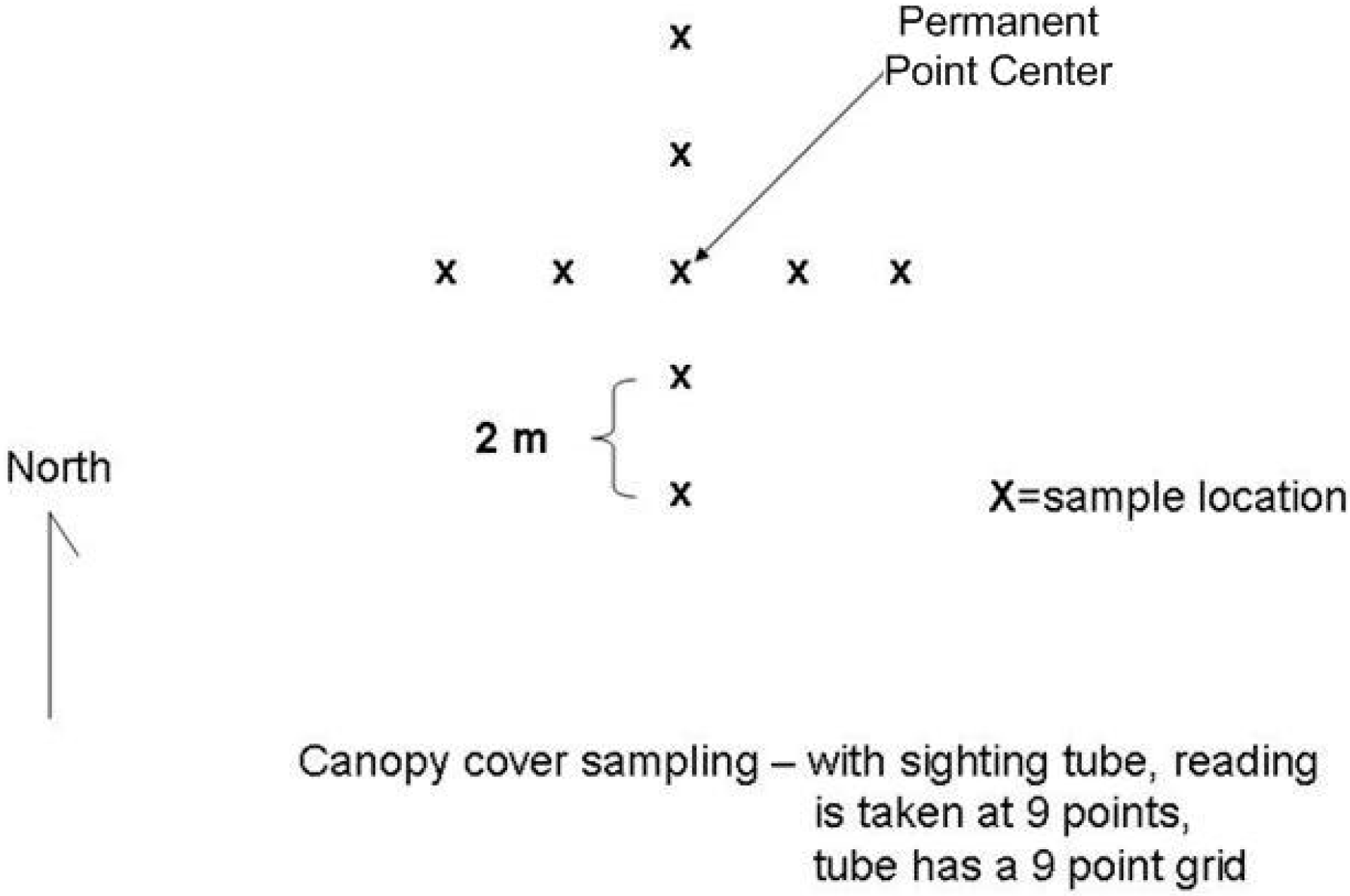
For the canopy cover assessment, 8 permanent point locations within each fire plot were established. These permanent points were located at 10 m intervals on two randomly located lines perpendicular to the fire plot boundary. To avoid bias caused by influences from adjacent treatment units, no sampling took place within 10-m of any edge. Overstory canopy cover was determined using a 9-point grid in a sighting tube with vertical and horizontal levels. Cover was determined at each permanent point center location and the four cardinal points at 2-m and 4-m from each permanent point location (
Figure 3). The yearly basal area assessment was determined by the variable radius plot method. Basal areas of trees/stems with ≥5 cm in DBH were quantified with a 10-factor wedge prism at each of the 8 permanent point locations that were used for collecting canopy cover.
Figure 3.
Canopy Cover Sampling Diagram for the Permanent Point Centers (8 Point Centers per Fire Plot).
Figure 3.
Canopy Cover Sampling Diagram for the Permanent Point Centers (8 Point Centers per Fire Plot).
2.5. Data Analyses
2.5.1. Airborne LiDAR Data Analysis
For appropriate validation and comparison with portable LiDAR data, x, y, z data points from the airborne LiDAR dataset with height above ground were clipped to the Stoddard fire plots. The variables of interest included canopy cover, canopy height (maximum, minimum, mean, and standard deviation), and two structural diversity indices, the Height Diversity Index (HDI), and the Height Evenness Index (HEI). Both diversity indices use a modification of the Shannon Diversity Index (H’) to calculate Foliage Height Diversity or Structural Diversity [
40]. Definitions and details of how these were calculated from the LiDAR point cloud datasets are included in Appendix A. Canopy height and cover indices were extracted using similar methodology described by [
6] for discrete return LiDAR, with slight modification from the 20 × 20 m window used by Lovell
et al. and Coops
et al. [
9,
10]. For the canopy heights, instead of using a 20 × 20 m window to obtain the highest canopy point as the maximum height, the entire Stoddard plots (45 × 45 m window) were used. Maximum mean height corresponded to the highest LiDAR canopy classified return within the entire plot, and mean canopy height used an average of all canopy returns over 2 m. Canopy cover was measured by redefining closed canopy returns as only the ones over 2 m and dividing the total number of these returns in each plot by all discrete returns in the same plot. The proportion of canopy returns is a standard canopy cover index [
6], which, for this study, has been slightly modified to exclude the herbaceous and lower shrub layers.
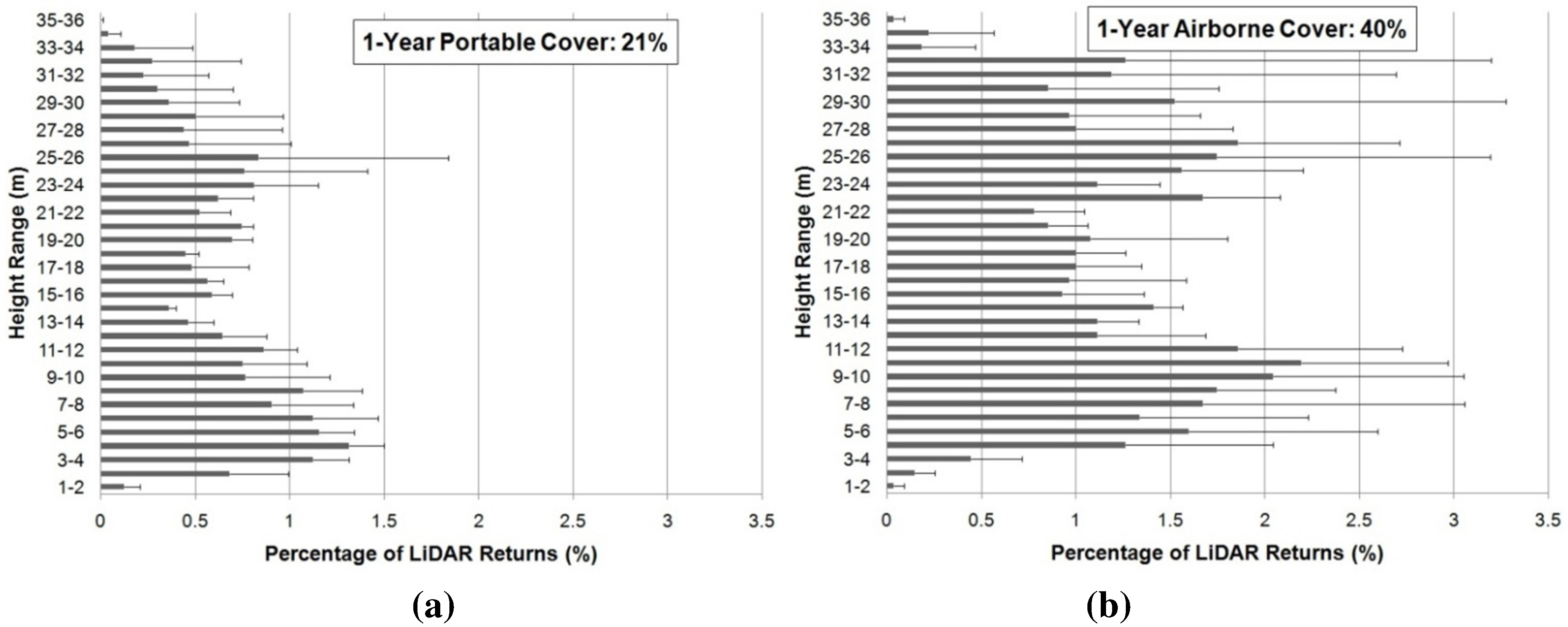
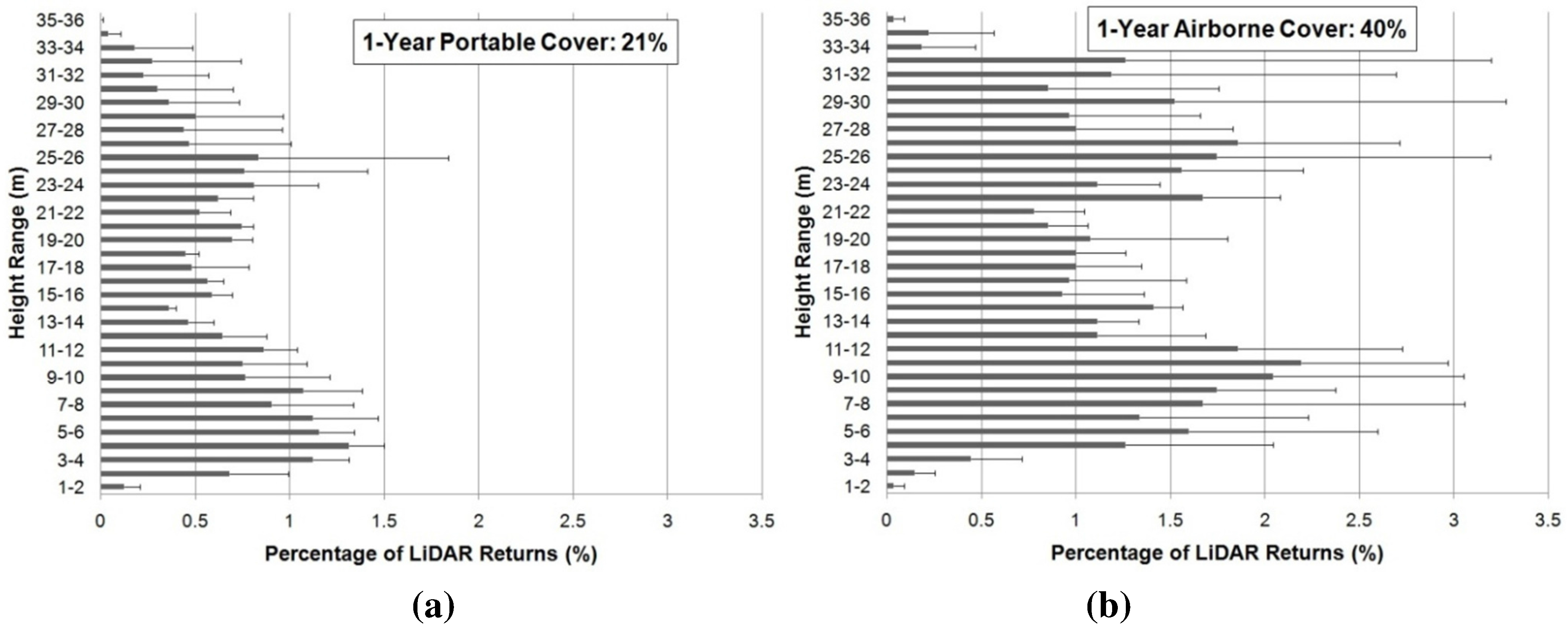
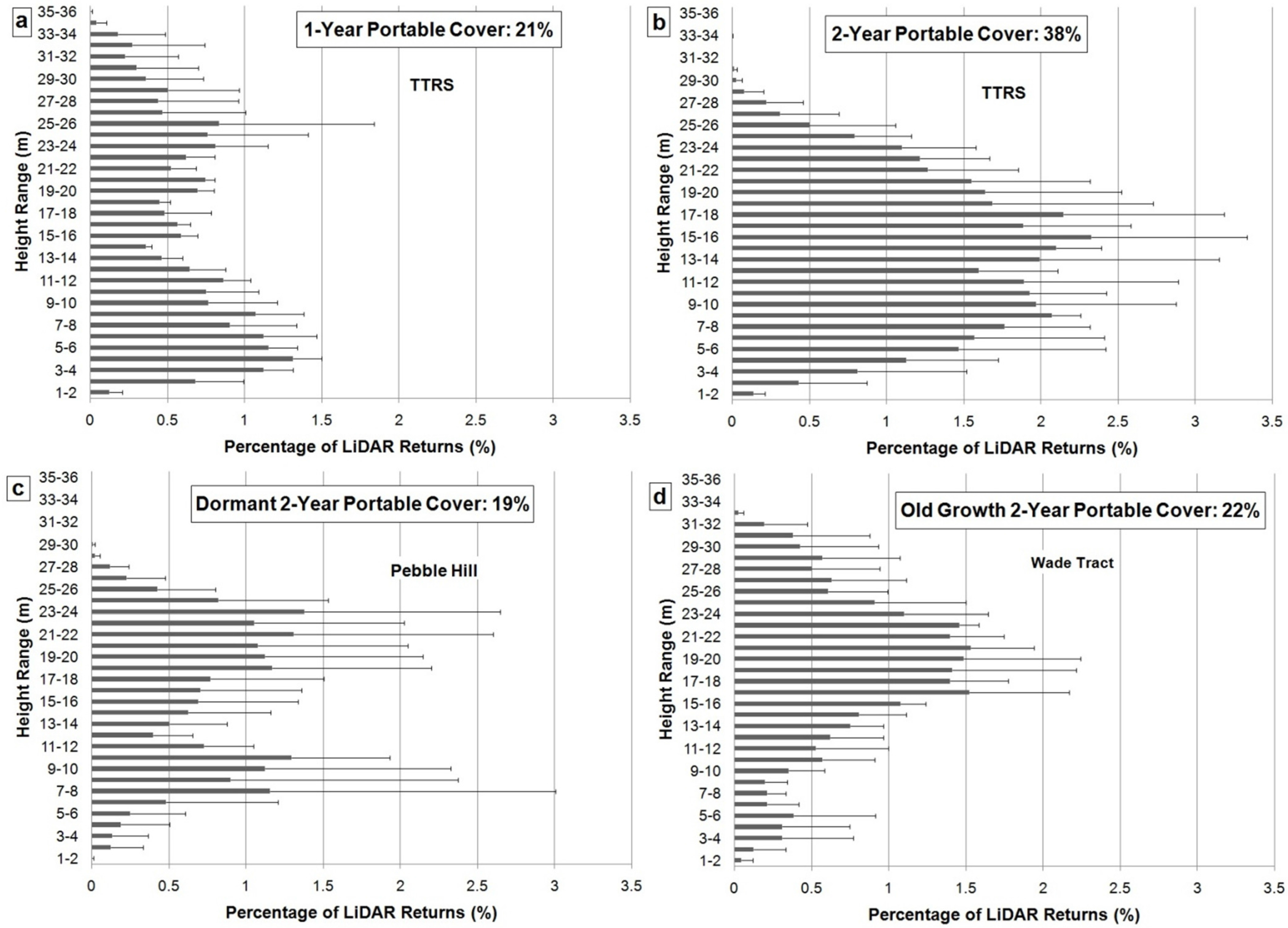
In order to examine the Stoddard plots three-dimensional structure, histograms of the proportion of LiDAR returns per 1 m height interval were constructed. No transformation of the data,
i.e., MacArthur-Horn transformation, typically applied to waveform datasets, was applied to the discrete return portable LiDAR in a attempt to adjust for target occlusion, since the goal was to represent an absolute measure of plant distribution [
41]. Additionally, the Height Diversity Index (HDI) and corresponding Height Evenness Index (HEI) were calculated using a finer scale interval of 0.5 m intervals. The Height Diversity Index (HDI) was calculated using the standard Shannon-Height Diversity Index formula (H’):
The Height Evenness Index (HEI) was calculated by using the following formula:
where S is the total number of foliage layers.
2.5.2. Portable LiDAR Data Analyses
The portable LiDAR data collected in ASCI text file formats were merged by Stoddard plot into database tables. Pre-processing of these data including assigning open/closed canopy indicators for all returns and adding 1.3 m (the height above ground of the portable LiDAR data collector) to all canopy return heights. Since the data collected are very simple (distance to target), only spreadsheet and database software were used. Individual transect data were collected in separate text files, but aggregated per plot during analyses. Since z is provided in distance to target (i.e., vegetation), planar differences among transects should be inherently accounted for.
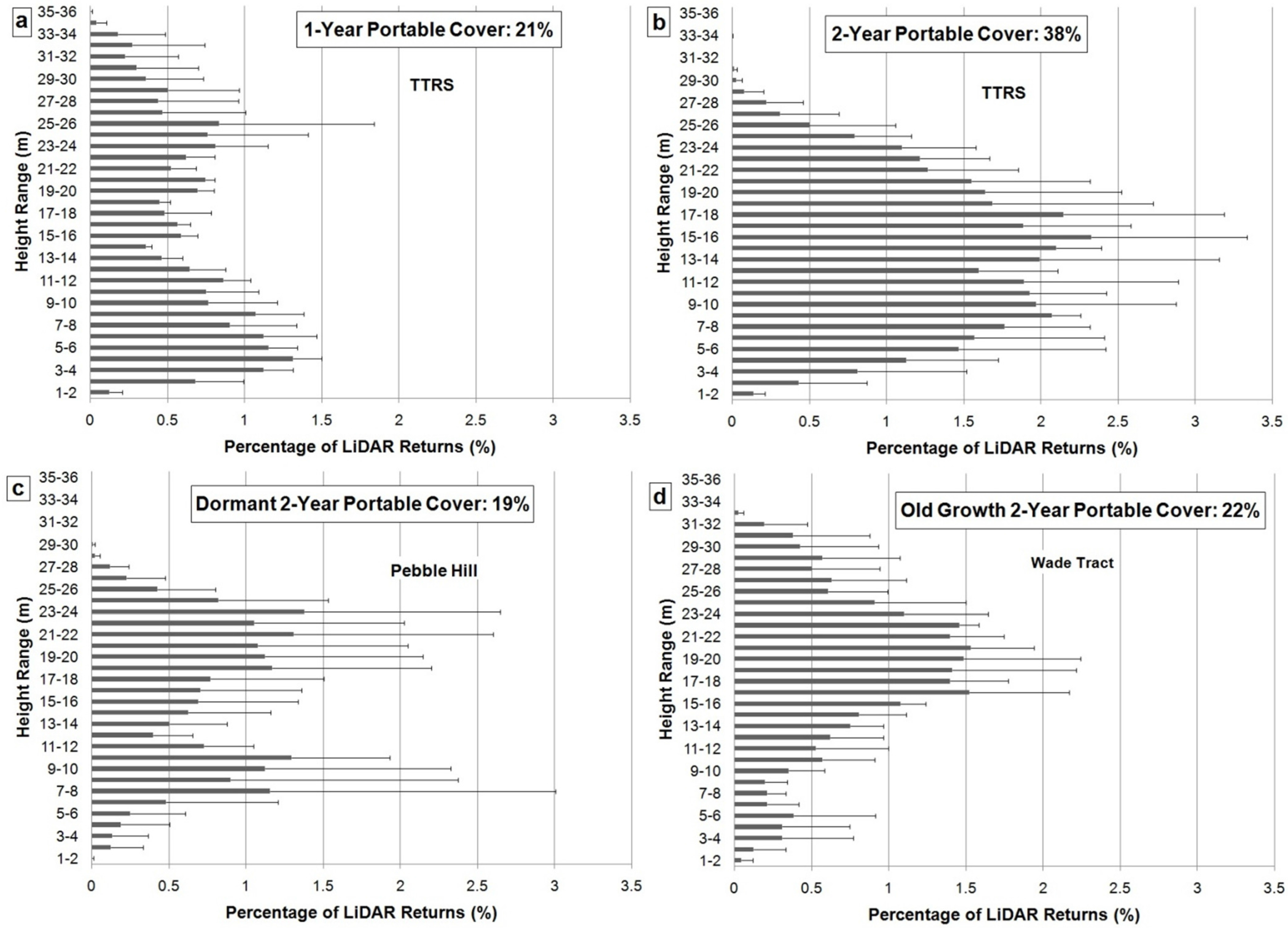
Similar metrics were calculated for the portable LiDAR Stoddard data: canopy cover, canopy height (maximum, minimum, mean, and standard deviation), and two structural diversity indices, HDI and HEI. The canopy cover for the portable LiDAR, included all captured canopy returns (>1.3 m) divided by the total returns (open and canopy returns). The structural indices were calculated using the proportion of returns within every 0.5 m interval. For consistency with the airborne LiDAR data profiles, no transformation of data to adjust for target occlusion took place. Histograms, mimicking the ones created with the airborne LiDAR data, were constructed for the portable LiDAR height classes of 1 m, providing a graphical 3-dimensional structural representative of the Stoddard fire plots.
2.5.3. Comparison and Statistics
To meet the first objective of this study—comparison of extracted metrics and profiles between portable and airborne LiDAR sensors—paired t-tests (or non-parametric alternatives, i.e., Wilcoxon signed rank test) of the extracted metrics using the two methods were implemented. The within-subjects design compares the airborne with portable LiDAR method per Stoddard plot in extracting canopy cover, mean and maximum canopy height, and the diversity indices. The Stoddard treatment plot TT3b presented a group of clustered high values (>44 m), 11.2 m higher than the corresponding airborne LiDAR extracted values and most surrounding canopy. These group of outliers were removed from the analyses, and potentially represent a system glitch (i.e., connector problems to the data device after heavy precipitation) or bird in flight.
Further analyses to provide an understanding of the correspondence between the airborne and portable LiDAR data collection methods, include the comparison of the return distributions across heights of each plot. Return histograms, pictures, and boxplots representing means and interquartile distributions of heights for both data collection methods were also studied.
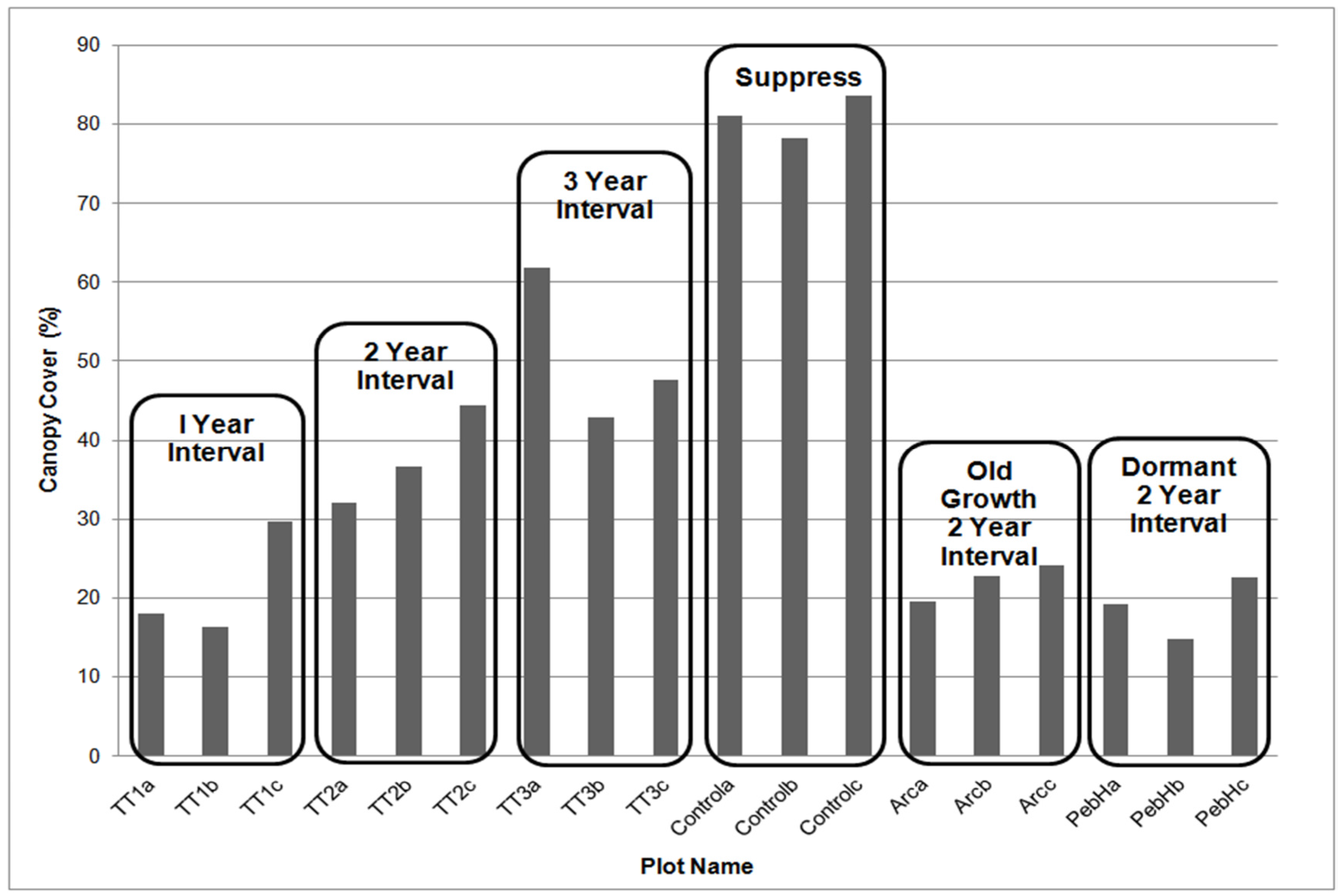
The second objective—detection of differences in the 3D canopy structure of different fire-managed plots—used one-way ANOVAs to highlight the sensitivity of the portable LiDAR in detecting structural differences among secondary and old-growth forest managed plots. The dependent variables examined were canopy cover, mean and maximum canopy heights, height and evenness diversity indices (HDI and EDI). The independent variable or grouping was based on the fire return interval and seasonality: transitional season fire with 1-, 2-, 3-return intervals (Stoddard or TT plots), dormant season 2-yr return intervals (Pebble Hill or PbH plots), and 2-yr growing season return intervals (Arcadia or Arc plots). With the exception of the plots at Arcadia, which are in a remnant of old-growth longleaf pine forest, all other 15 plots are located in secondary old field pine forest ecosystems. Three replicates per treatment type (represented by location of block number a, b, and c at Tall Timbers) were included in the analyses of variance. Post-hoc tests, Tukey Honestly Significantly Different (HSD) tests were performed to determine pairwise significant differences among means of treatment. In addition to the statistical analyses discerning the impact of a variety of fire treatments on several structural metrics, visual observations (i.e., bar graphs and histograms) were constructed for all metrics of interest with 5 treatment types.
4. Discussion
4.1. Significance
Both the airborne and portable sensors provided detailed 3D vertical profiles with similar canopy cover metrics and maximum canopy heights across most managed forest plots. Canopy cover metrics obtained by the portable ground LiDAR approximated field collected data more closely than airborne derived metrics. This is an advantage for land managers or foresters interested in a cost-affordable-change detection tool that provides compatible values to field collected data.
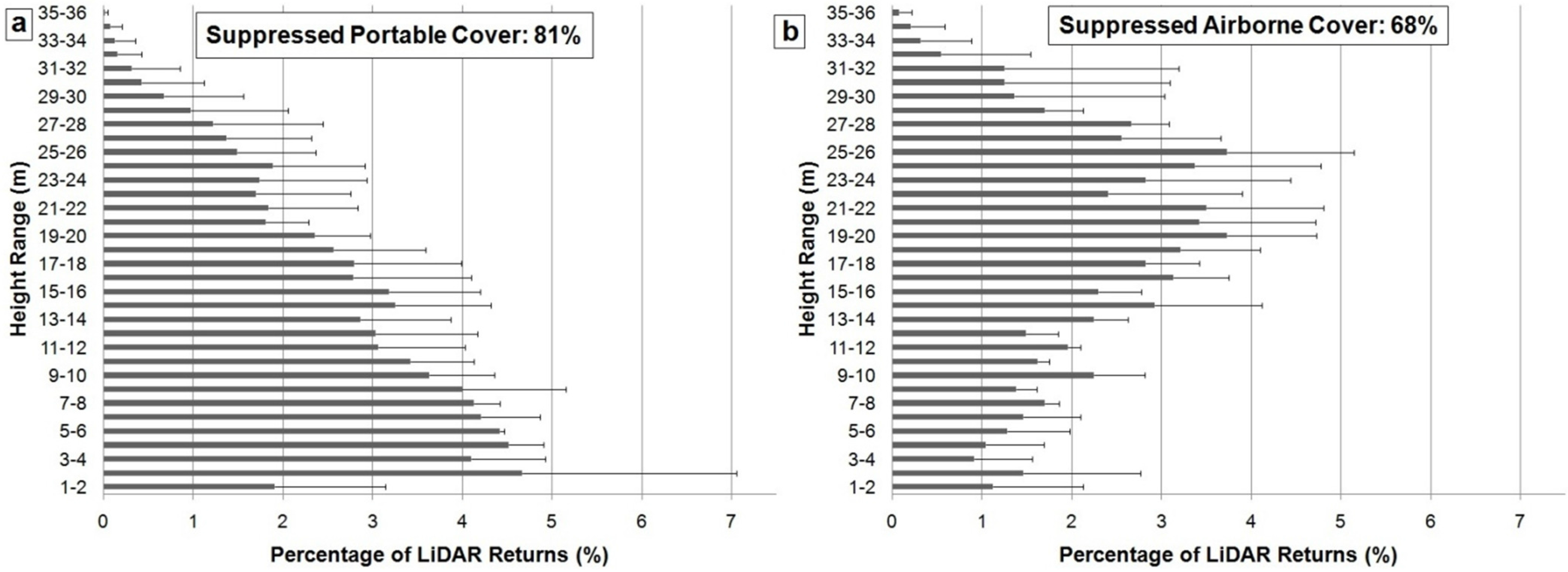
Differences in canopy cover metrics and range return distributions were intimately related to the sensors point of view. Due to obscuration effects, there is an inherent bias to accentuate any vegetation closest to the sensor [
41]: for the ground-based (bottom-up) system, shrub and mid level canopy are captured with more detail, while for the airborne system the top canopy layers are better represented. As consequence of this bias, the portable system, provided an underestimation of canopy cover in open forest systems (<50% canopy cover), but was more sensitive in detection of cover in hardwood woodland plots (>60% canopy cover). Plot mean heights detected using the portable system were significantly lower (by 3 m) than airborne LiDAR corresponding metrics.
Another potential bias, even though minor in comparison to the obscuration one, could have been a direct result of the two different types of sensors and their sampling geometries: the airborne system, a discrete scanner system, has a smaller beam divergence than the portable system, a profiling one. The footprint size for the airborne system has a minute variation from the top of the canopy to the ground, while there is a doubling of footprint size from 0 to 50 m with the portable system (12.4–25.6 cm
2 [
35]).
The most significant findings of this study were twofold: (1) an affordable portable LiDAR unit performed remarkably well in detecting fine structural change differences among fire managed plots with known histories (2) fire return intervals, seasonality and past land use interact to shape the three-dimensional structure of southeastern pine forests. Specifically, canopy cover and vegetation profiles shift rapidly with an annual increase in fire return interval, with the statistically significant threshold being between 2- and 3-yr fire return intervals. When managing southeastern pine forests the maintenance of a specific fire return interval does not guarantee one particular structural result. Fire seasonality (dormant, growing season or transitional) and/or land use history (conversion from agricultural land versus old-growth) also play an important role in shaping canopy structure. In this study, plots in nearby forests managed with the same fire return interval, but different burn seasons and historic land uses had distinct canopy covers and vertical canopy structural distribution.
4.2. Strengths and Limitations of Airborne and Portable Discrete Return Sensors
The portable system used in this study has some of the common bias from any ground-based bottom-up system: insensitivity to top canopy layers, logistical and financial impossibility of covering large spatial areas or difficulty of accessing terrain. In addition, this particular system and its installation have additional weaknesses: no associated x and y spatial coordinates, no auto-level to prevent potential tilting of the unit, and very rudimentary data processing.
There are also important strengths of this portable LiDAR system. For example, this system is able to be more sensitive in detecting lower canopy levels [
1,
26,
34,
35,
42], which are missed by the airborne systems. In addition, this also explained the trend in the canopy cover data, and lower plot mean height. The hardwood-dominated plots contained dense subcanopy and shrub elements, underrepresented in the airborne LiDAR return data [
33]. The portable sensor, when implemented using a dense network of transects, seemed less likely to miss a tree apex, a common weakness of discrete airborne LiDAR systems [
8,
9], especially with airborne data point-spacing of 1 m or greater. The fine-grained data collection of the portable LiDAR system (thousands of returns per meter) would eliminate, in large part, missing a tree apex. The result was seen in an overall 1.5 m higher plot maximum height.
Both sensors provided detailed plot-level 3D structure of the forest, with differences in these profiles being minimal in open canopy setting. The sensitivity of the portable LiDAR in capturing lower subcanopy layers, while undersampling upper canopy elements [
33,
34] becomes obvious in denser conditions (>60% cover). This specific portable LiDAR system, even though unable to detect data below the collection height (1.3 m, in this case), is still a powerful tool in detecting establishment of hardwood shrub or small tree species in open pine forests. Other ground-based systems, even a few portable ones [
36], collect groundcover data (top-bottom system), but are not affordable rapid assessment systems designed to collect plot level metrics.
The ecological implication of being unable to detect shrub level data (<1.3 m) with this portable system is especially relevant in habitat suitability modeling of species of management and conservation concern. Many pine-grassland obligate species, such as prairie warbler (
Dendroica discolor), indigo bunting (
Passerina cyanea), red-headed woodpecker (
Melanerpes erythrocephalus), and Bachman’s sparrow (
Aimophila aestivalis), are negatively associated with midstory canopy and positively associated with dense understory [
43]. In fact, for many wildlife species, being able to describe the understory structure is an important factor in predicting habitat suitability [
44]. Specific species of management concern in the southeastern US,
i.e., northern bobwhite (
Colinus virginianus), are currently managed by the maintenance of permanent woody cover < 2 m in height [
45,
46]. Without access to this understory canopy layer, suitability models for many species would be incomplete, and monitoring or implementation of management plans could not be guided.
However, for species directly impacted by canopy cover, the portable LiDAR system would be able to provide clear guidance: canopy cover differences could be clearly detected among fire treatments and forest types. Furthermore, it provided vegetation height profiles that indicate the impact of both fire return interval and season in the canopy structure. Plots managed with fire return intervals of 2-yrs had significantly different profiles, depending on the seasonality of the fire treatment (dormant, transition or growing season) and/or the historical context of the forest (
i.e., secondary
versus old-growth forest). A distinct advantage of using portable LiDAR was the clear detection of recruitment/lower canopy vegetation, which provides invaluable information for land managers. Another important application of LiDAR would be in the detection and monitoring of structural complexity (above 1.3 m) and canopy closure, which impact the small mammal community, in particular habitat specialists such as the harvest mouse (
Reithrodontomys nutalli) and hispid cotton rat (
Sigmodon hispidus) [
43].
4.3. Recommendations and Future Applications
Some elements of this portable system could be further refined to reduce its limitations. One of the most important components that would increase the usability of the system would be the addition of a GPS tagging throughout the data collection. This would allow the collection of 3D data, and the construction of point cloud datasets. Geotagging could occur at certain time intervals, and be provided by an external submeter GPS data collector. Having geotagged height information would reduce the data preparation time of creating transects and allow detailed profiling of subplot elements to occur. Additionally, the inclusion of a tilt sensor, which would provide intermittent information to the data collector and allow for post-processing adjustments, would further reduce the potential bias of this system and expand its application beyond plot level aggregation studies.
Another weakness of the ground-based system was the exclusion of the herbaceous and lower shrub-level structure, which, in some habitat suitability modeling and monitoring, are of high interest. Shrub encroachment and initial recruitment are two elements that land managers would like to have immediate feedback on without extensive fieldwork. It would be interesting to explore combining a bottom-up with a top-down approach of this same system; this could only be properly combined with appropriate geotagging. Furthermore, airborne LiDAR systems have limitations in detecting lower canopy structure which could be minimized by the fusion of data derived from bottom-up sensors, especially if these were inexpensive. The idea of fusing airborne and portable ground-based LiDAR systems to reduce blind spots has been just recently independently suggested by Hosoi
et al. [
33].
Future work should focus on providing synchronous airborne and portable LiDAR data collection to eliminate any other potential factors in canopy structure changes detected between both sensors. Repeated analyses of the same plot through time, maintaining seasonality and treatment, would allow an understanding of the consistency and repeatability of this system in structural determination. Finally, the future of active remote sensing techniques for natural resource management hinges on data fusion, specifically bottom-up and top-down sensors, to eliminate weaknesses and biases of either approaches. A focus on the methodology of LiDAR fusion and its application to a variety of ecosystems is warranted.
4.4. Overall Conclusions
There is value in the development of a ground-based portable scanning LiDAR unit for forest and land management. This system would not be a replacement, but an addition to airborne LiDAR sensor data, since the spatial scale, lack of understory detection and bias towards midstory would be difficult weaknesses to surpass. A cost-affordable unit with streamlined data processing could be part of a land manager’s tools for rapid assessment across forest plots, particularly in areas of high management concern for ecological restoration. Unlike airborne LiDAR, the upfront investment would allow frequent future data collections and change analyses, crucial data for adaptable management strategies. The portable system tested in this study performed well in capturing small changes in both canopy metrics and 3-D vegetation profiles of differently managed forest plots.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}