Monitoring Urban Tree Cover Using Object-Based Image Analysis and Public Domain Remotely Sensed Data




Abstract
:1. Introduction

{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Level I | Level II | Level III |
| 111. Single-family Units | ||
| 12. Commercial and Services | 112. Multiple-family Units | |
| 13. Industrial | 113. Group Quarters | |
| 14. Transportation, Communications and Utilities | 114. Residential Hotels | |
| 15. Industrial and Commercial Complexes | 115. Mobile Home Parks | |
| 16. Mixed Urban or Built-up Land | 116. Transient Lodging | |
| 17. Other Urban or Built-up Land | 117. Other | |
| …. | ||
| 41. Deciduous Forest Land | 421. Natural/Unmanaged Trees | |
| 422. Natural/Managed Park Trees | ||
| 43. Mixed Forest Land | 423. Managed Residential/Street Trees | |
| 423. Plantation Trees |
- (1)
- create a flexible algorithm,
- (2)
- test algorithm performance on imagery of varying spatial and spectral resolutions, and
- (3)
- assess the accuracy and implications for tree cover assessment of the resulting classifications, specifically, the implication on ground sampling design.
2. Methods
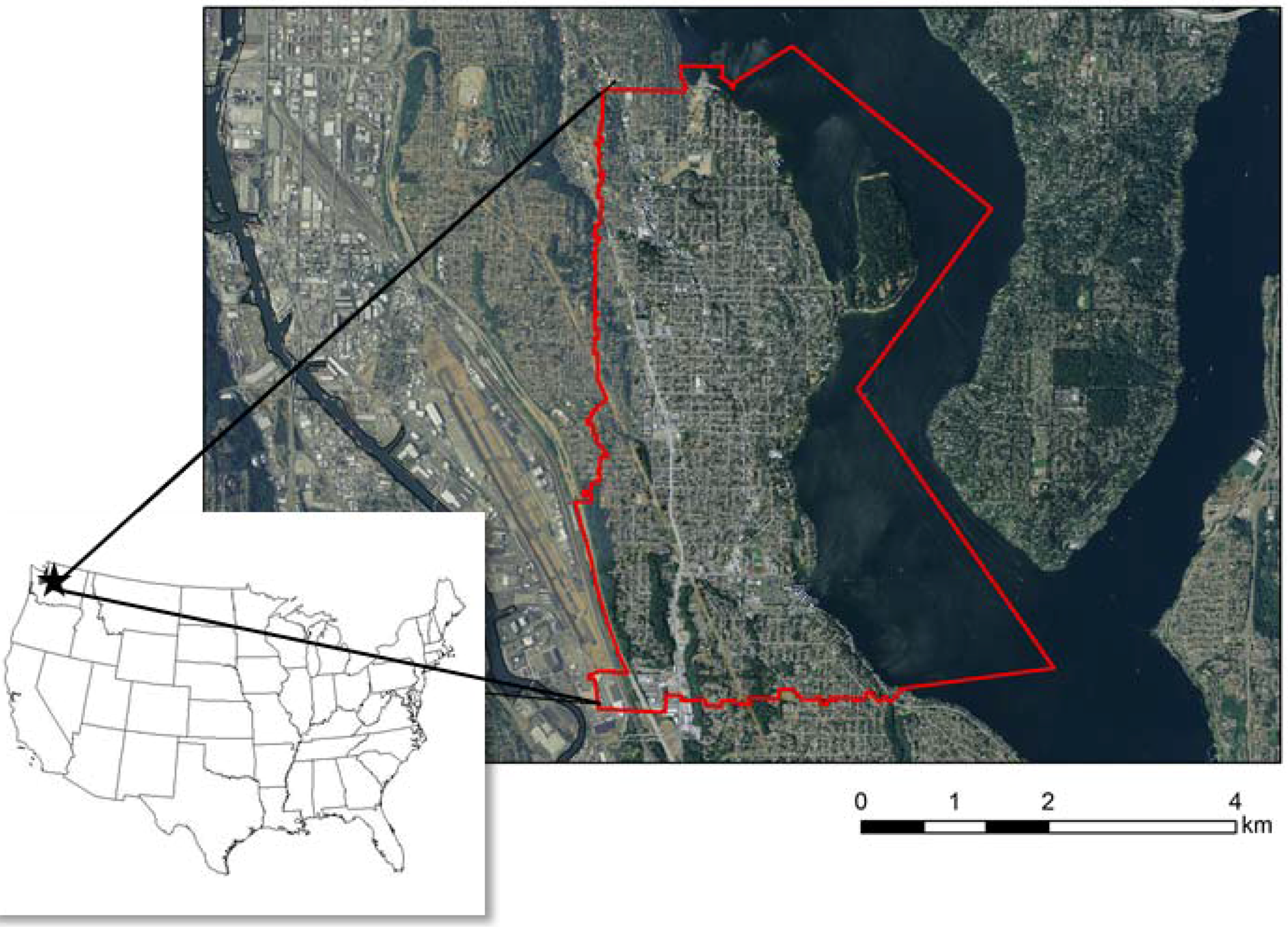
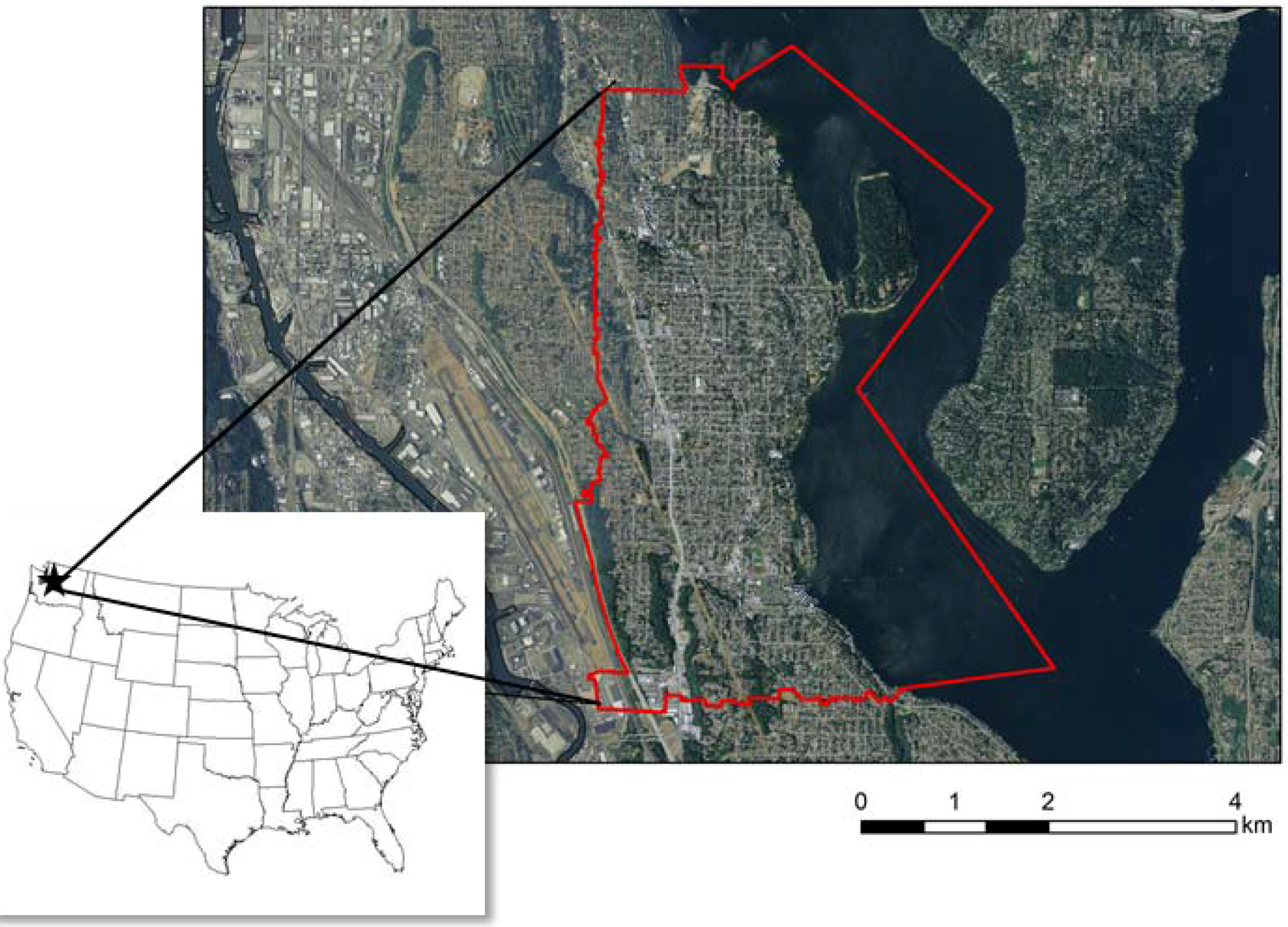
2.1. Study Area
2.2. Datasets
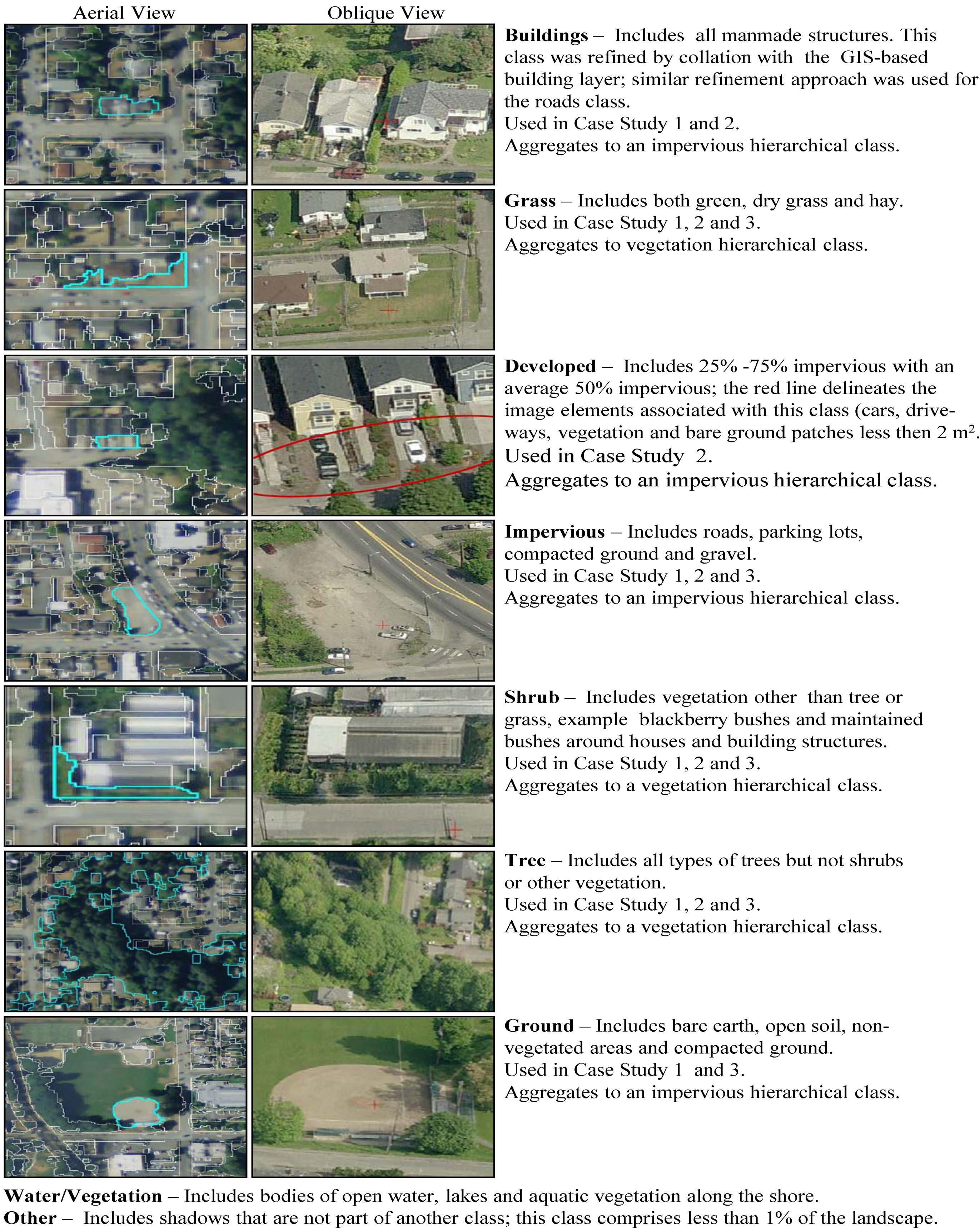
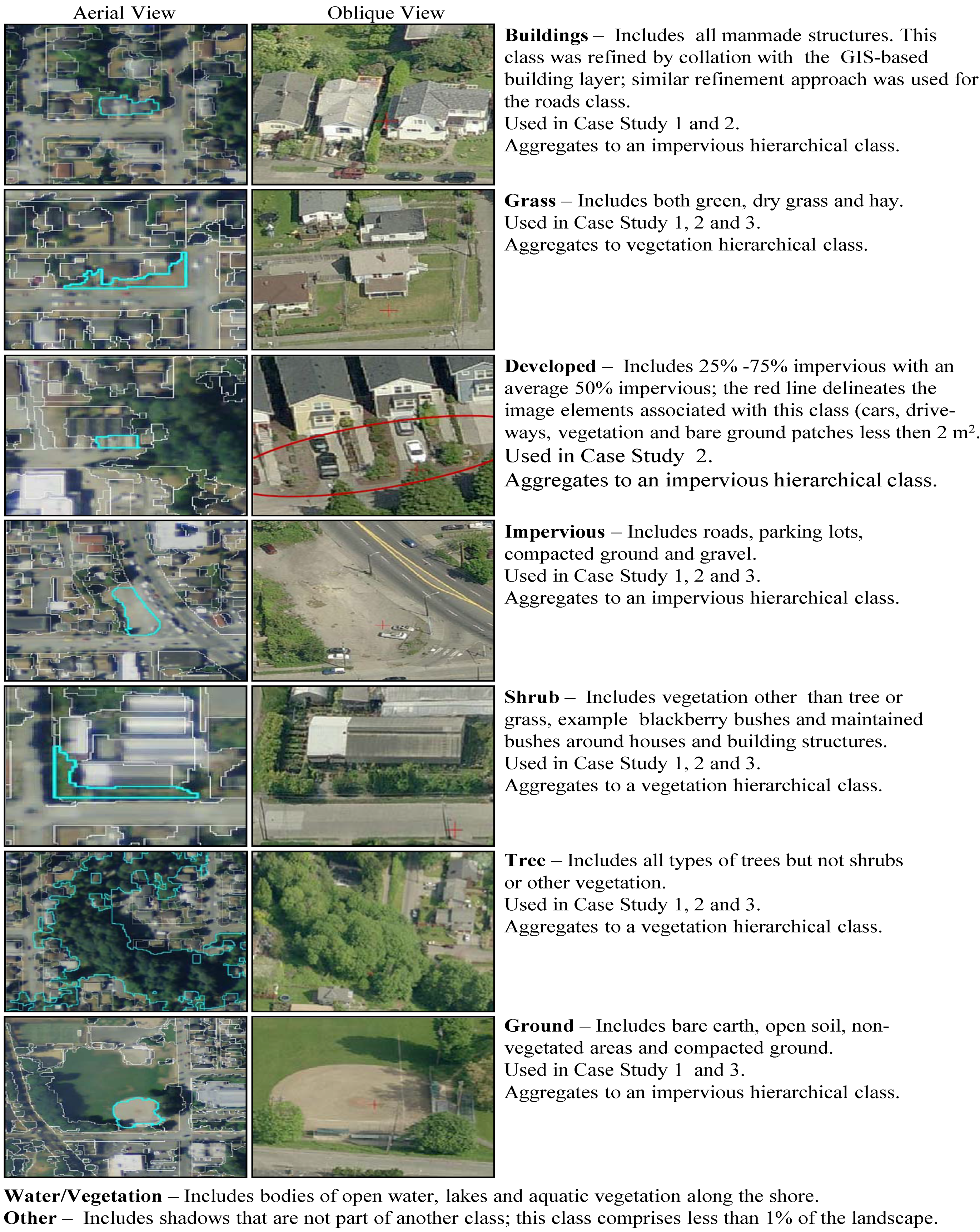
2.3. Land Use/Land Cover Classifications
| Dataset | Date | Source | Description | Used For |
|---|---|---|---|---|
| GIS Roads Shapefile | 2006 | City of Seattle | Manually derived road centerlines | Primary Segmentation; Visual Assessment of Classification Accuracy |
| GIS Building Footprints Shapefile | 1993 | City of Seattle | Manually derived building footprints | Primary Segmentation; Visual Assessment of Classification Accuracy |
| NAIP 2002 | Jun-02 | NAIP | Aerial ortho-rectified photography (3-band true color); 30 cm GSD | Primary Segmentation; Secondary Segmentation, Classification; Visual Assessment and Class Refinement |
| NAIP 2009 | Aug-09 | NAIP | Aerial ortho-rectified photography (4-band infrared); 1 m per pixel resolution | Primary Segmentation; Secondary Segmentation, Classification; Visual Assessment and Class Refinement |
| QuickBird | Jun-07 | City of Seattle | 4-band infrared imagery; 0.6 m per pixel resolution | NCDC OBIA Based Methods [ 16] |
| NLCD % Canopy Cover | 2001 | USDA | 2001 per-pixel classification derived dataset | Generating Field Sampling Points |
| Homogeneity Texture 2002 | 2009 | 2009 NAIP | derived from red back of the NAIP 2002 imagery, using all adjacent pixels, 0.3 per pixel resolution | Classification Algorithm |
| Homogeneity Texture 2009 | 2002 | 2002 NAIP | derived from red back of the NAIP 2002 imagery, using all adjacent pixels, 0.3 per pixel resolution | Classification Algorithm |
| 2009 oblique photography | Jun-09 | King County GIS | true color, four-direction neighborhood-level views were available, at a nominal ground sample distance (GSD) of 15 cm | Visual Assessment and Decision Making for Class Refinement |
2.4. Case Study 1: Rainier Valley, 2002 Hyperspatial True Color Imagery
| Case Study 1 = per-pixel resolution = 100 cm | |||||
| 1st Segmentation | |||||
| Scale parameters | Shape | Compactness | Band weights | ||
| 75 | 0.1 | 0.7 | Red (1), Green (2), Blue (1) | ||
| 2nd Segmentation | |||||
| Scale parameters | Shape | Compactness | |||
| 50 | 0.1 | 0.7 | |||
| Case Study 2 = per-pixel resolution = 30 cm | |||||
| 1st Segmentation | |||||
| Scale parameters | Shape | Compactness | Band weights | ||
| 30 | 0.1 | 0.5 | Infrared (2) Red (1), Green (1), Blue (1) | ||
| 2nd Segmentation | |||||
| Scale parameters | Shape | Compactness | |||
| 20 | 0.3 | 0.7 | |||
2.5. Case Study 2: Rainier Valley, 2009 Hyperspatial Near-Infrared Imagery
2.6. Accuracy Assessment
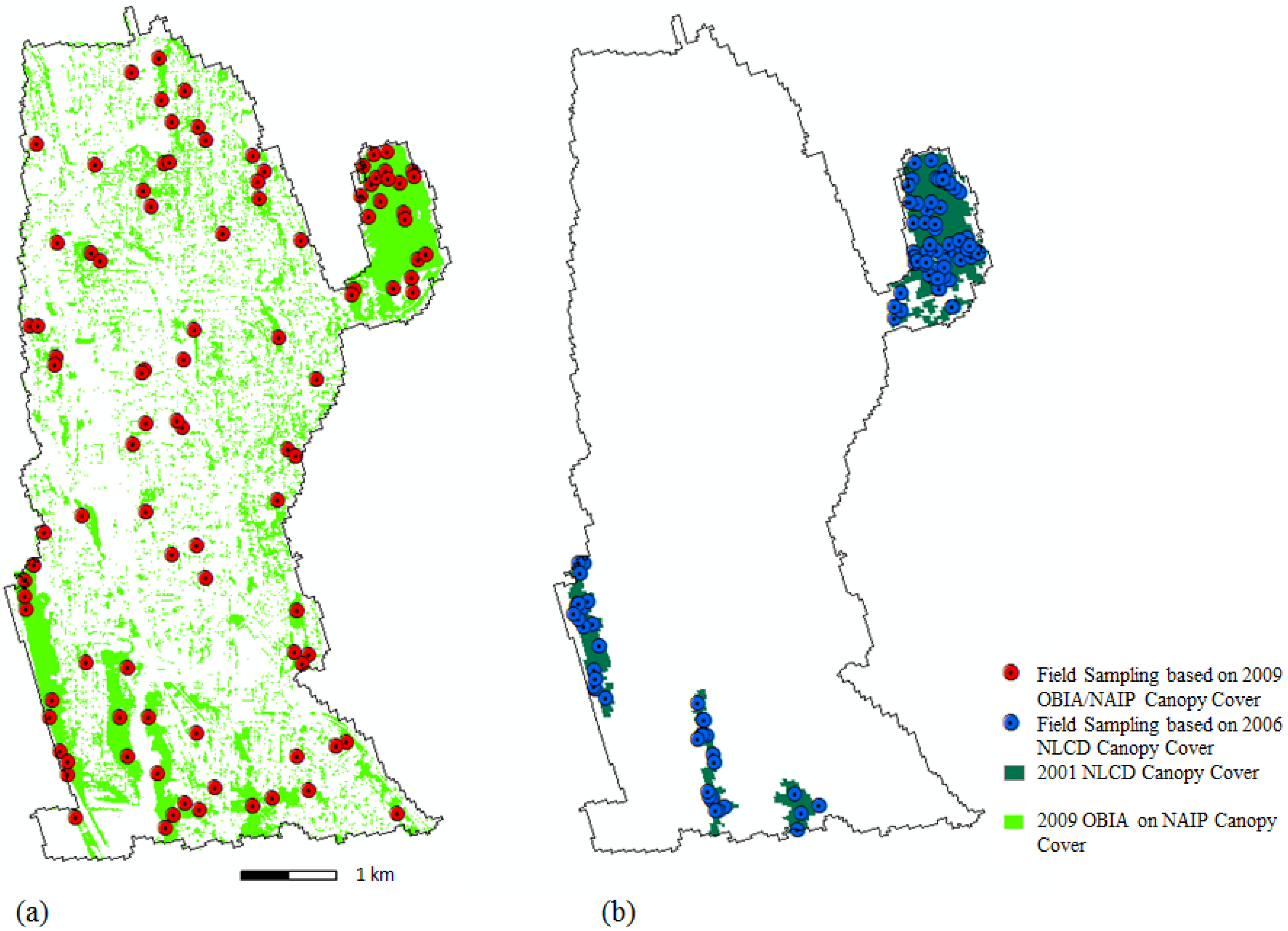
2.7. Field Sampling Design
3. Results and Discussion
3.1. Case Study 1: Rainier Valley, 2002 Hyperspatial True Color Aerial Imagery
3.2. Error Attribution for Case Study 1
| Class | Buildings | Grass | Impervious | Shrub | Tree | Water | Ground | Other | Total | Producer’s Accuracy | |
| Classification Data | Building | 52 | 2 | 4 | 3 | 61 | 85.3% | ||||
| Grass | 3 | 42 | 8 | 12 | 1 | 66 | 63.6% | ||||
| Impervious | 5 | 11 | 62 | 6 | 1 | 86 | 72.1% | ||||
| Shrub | 2 | 1 | 8 | 1 | 11 | 9.1% | |||||
| Tree | 6 | 3 | 56 | 65 | 86.2% | ||||||
| Water/Veg | 1 | 1 | 2 | 50% | |||||||
| Ground | 3 | 4 | 2 | 0 | 9 | 22.2% | |||||
| Other | 0 | 0 | 0% | ||||||||
| Total | 63 | 63 | 81 | 1 | 88 | 1 | 2 | 1 | 300 | ||
| User’s Accuracy | 82.5% | 66.7% | 76.5% | 100% | 63.6% | 100% | 0% | ||||
| Khat | 0.78 | 0.57 | 0.67 | 1 | 0.54 | 1 | N/A | ||||
| Overall Accuracy | 71.3% | ||||||||||
3.3. Case Study 2: Rainier Valley, 2009 Hyperspatial Near-Infrared Aerial Imagery
| Class | Buildings | Developed | Grass | Impervious | Shrub | Tree | Water/Veg | Other | Total | Producer’s Accuracy | |
| Classification Data | Buildings | 54 | 2 | 1 | 4 | 61 | 88.50% | ||||
| Developed | 6 | 6 | 100% | ||||||||
| Grass | 1 | 46 | 9 | 4 | 6 | 66 | 69.7% | ||||
| Impervious | 6 | 7 | 66 | 79 | 83.5% | ||||||
| Shrub | 4 | 7 | 11 | 36.4% | |||||||
| Tree | 2 | 2 | 62 | 66 | 93.9% | ||||||
| Water/Veg | 1 | 1 | 100% | ||||||||
| Other | 4 | 2 | 1 | 1 | 2 | 0 | 10 | 0% | |||
| Total | 61 | 12 | 58 | 80 | 11 | 77 | 1 | 0 | 300 | ||
| Users Accuracy | 88.5% | 50% | 79.3% | 82.5% | 36.4% | 80.5% | 100% | ||||
| Khat | 0.86 | 0.49 | 0.73 | 0.76 | 0.34 | 0.75 | 1 | ||||
| Overall Accuracy | 79.7% | ||||||||||
3.4. Error Attribution for Case Study 2
3.5. Case Study 3: Rainier Valley, 2007 Hyperspatial Near-Infrared Satellite Imagery
3.6. Other Issues
| Class | Ground | Grass | Impervious | Shrub | Tree | Water | Other | Total | Producer’s Accuracy | |
| Classification Data | Ground | 4 | 2 | 1 | 2 | 6 | 44.4% | |||
| Grass | 7 | 44 | 6 | 4 | 5 | 66 | 66.7% | |||
| Impervious | 1 | 5 | 137 | 1 | 1 | 1 | 146 | 93.8% | ||
| Shrub | 6 | 3 | 5 | 11 | 27.3% | |||||
| Tree | 6 | 1 | 59 | 66 | 89.4% | |||||
| Water | 1 | 0 | 1 | 2 | 0% | |||||
| Other | 2 | |||||||||
| Total | 12 | 60 | 144 | 9 | 73 | 0 | 2 | 250 | ||
| User’s Accuracy | 33.3% | 73.3% | 95.1% | 33.3% | 80.8% | 0% | 300 | |||
| Khat | 0.31 | 0.66 | 0.91 | 0.31 | 0.86 | 0.01 | ||||
| Overall Accuracy | 83.3% | |||||||||
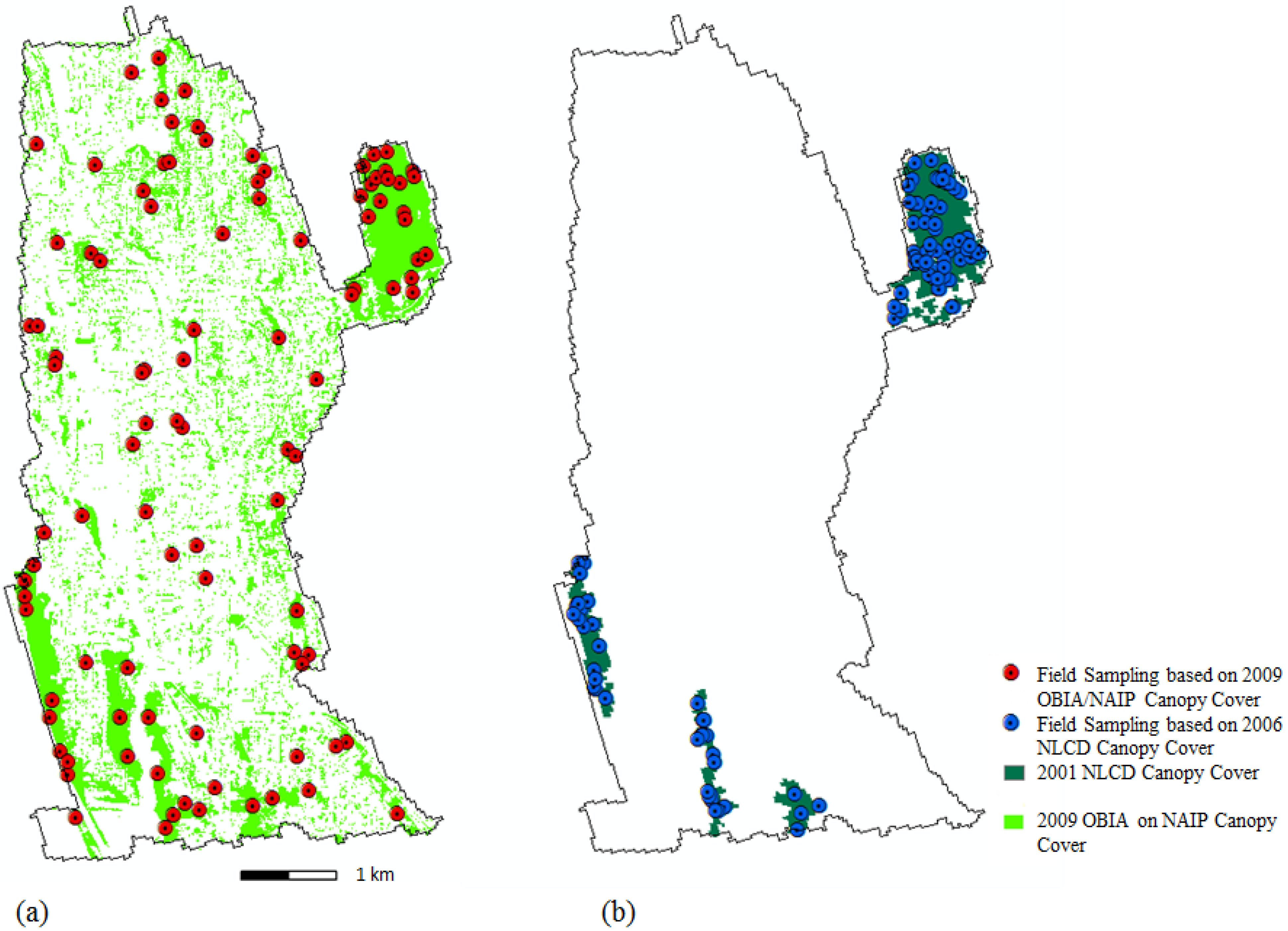
3.7. Field Sampling Design
4. Conclusions
Acknowledgements
References
- Clark, J.R.; Matheny, N.P.; Cross, G.; Wake, V. A model of urban forest sustainability. J. Arboricul. 1997, 23, 17–30. [Google Scholar]
- Kerr, J.T.; Ostrovsky, M. From space to species: Ecological applications for remote sensing. Trends Ecol. Evol. 2003, 18, 299–305. [Google Scholar] [CrossRef]
- Fassnacht, K.S.; Cohen, W.B.; Spies, T.A. Key issues in making and using satellite-based maps in ecology: A primer. Forest Ecol. Manage. 2006, 222, 167–181. [Google Scholar] [CrossRef]
- Styers, D.M.; Chappelka, A.H.; Marzen, L.J.; Somers, G.L. Developing a land-cover classification to select indicators of forest ecosystem health in a rapidly urbanizing landscape. Landscape Urban Plan. 2010, 94, 158–165. [Google Scholar] [CrossRef]
- Pickett, S.T.A.; Cadenasso, M.L.; Grove, J.M.; Boone, C.G.; Groffman, P.M.; Irwin, E.; Kaushal, S.S.; Marshall, V.; McGrath, B.P.; Nilon, C.H.; et al. Urban ecological systems: Scientific foundations and a decade of progress. J. Environ. Manage. 2010, 92, 331–362. [Google Scholar] [CrossRef] [PubMed]
- Herold, M.; Couclelis, H.; Clarke, K.C. The role of spatial metrics in the analysis and modeling of urban land use change. Comput. Environ. Urban Syst. 2005, 29, 369–399. [Google Scholar] [CrossRef]
- Hunsinger, T.; Moskal, L.M. Half a Century of Spatial & Temporal Landscape Changes in the Finley River Basin, Missouri. In Proceedings of Association of American Geographers Annual Conference, Denver, CO, USA, 5–9 April 2005.
- Turner, M.G.; Gardner, R.H. Quantitative Methods in Landscape Ecology; Springer-Verlag: New York, NY, USA, 1991. [Google Scholar]
- Moskal, L.M.; Dunbar, M.D.; Jakubauskas, M.E. Visualizing the forest: A forest inventory characterization in the yellowstone national park based on geostatistical models. In A Message from the Tatras: Geographical Information Systems & Remote Sensing in Mountain Environmental Research; Widacki, W., Bytnerowicz, A., Riebau, A., Eds.; Jagiellonian University Press: Kraków, Poland, 2004; pp. 219–232. [Google Scholar]
- Anderson, J.R.; Hardy, E.E.; Roach, J.T.; Witmer, R.E. A Land Use and Land Cover Classification System for Use with Remote Sensor Data; Geological Survey Professional Paper 964; US Geological Survey: Washington, DC, USA, 1976.
- Blaschke, T. Object based image analysis for remote sensing. ISPRS J. Photogramm. 2010, 65, 2–16. [Google Scholar] [CrossRef]
- Cleve, C.; Kelly, M.; Kearns, F.R.; Moritz, M. Classification of the wildland–urban interface: A comparison of pixel- and object-based classifications using high-resolution aerial photography. Comput. Environ. Urban Syst. 2008, 32, 317–326. [Google Scholar] [CrossRef]
- Zhou, W.; Troy, A. An object-oriented approach for analysing and characterizing urban landscape at the parcel level. Int. J. Remote Sens. 2008, 29, 3119–3135. [Google Scholar] [CrossRef]
- Environmental Action Agenda 2005; City of Seattle: Seattle, WA, USA, 2005; Available online: http://www.cityofseattle.net/environment/ActionAgenda.htm (accessed on 10 October 2010).
- Parlin, M. Seattle, Washington Urban Tree Canopy Analysis Project Report: Looking Back and Moving Forward; Native Communities Development Corporation: Colorado Springs, CO, USA, 2009; p. 17. [Google Scholar]
- Chambers, J.Q.; Asner, G.P.; Morton, D.C.; Anderson, L.O.; Saatchi, S.S.; Espírito-Santo, F.D.B.; Palace, M.; Souza, C., Jr. Regional ecosystem structure and function: Ecological insights from remote sensing of tropical forests. Trends Ecol. Evol. 2007, 22, 414–423. [Google Scholar] [CrossRef] [PubMed]
- Nowak, D.J.; Rowntree, R.A.; McPherson, E.G.; Sisinni, S.M.; Kermann, E.R.; Stevens, J.C. Measuring and analyzing urban tree cover. Landscape Urban Plan. 1996, 36, 49–57. [Google Scholar] [CrossRef]
- Tuominen, S.; Pekkarinen, A. Performance of different spectral and textural aerial photograph features in multi-source forest inventory. Remote Sens. Environ. 2005, 94, 256–268. [Google Scholar] [CrossRef]
- Foster, B. Some urban measurements from landsat data. Photogramm. Eng. Remote Sensing 1995, 48, 139–151. [Google Scholar]
- Alberti, M.; Weeks, R.; Coe, S. Urban land cover change analysis in central puget sound. Photogramm. Eng. Remote Sensing 2004, 70, 1043–1052. [Google Scholar] [CrossRef]
- Platt, R.V.; Rapoza, L. An evaluation of an object-oriented paradigm for land use/land cover classification. The Professional Geogr. 2008, 60, 87–100. [Google Scholar] [CrossRef]
- Hay, G.J.; Castilla, G.; Wulder, M.A.; Ruiz, J.R. An automated object-based approach for the multiscale image segmentation of forest scenes. Int. J. Appl. Earth Obs. Geoinf. 2005, 7, 339–359. [Google Scholar] [CrossRef]
- Halabisky, M.; Moskal, L.M.; Hall, S.A. Object-based classification of semi-arid wetlands. J. Appl. Remote Sens. 2011, 5, 13. [Google Scholar] [CrossRef]
- Gertsch, S. Census Bureau: 98118 the Most Diverse Zip Code in US; KOMOnews: Seattle, WA, USA, 2010. [Google Scholar]
- Wilson, G.W. Opinion: America’s most diverse zip code shows the way. Rainier Valley Post, 31 March 2010. [Google Scholar] [CrossRef]
- Heynen, N.; Perkins, H.A.; Roy, P. The political ecology of uneven urban green space. Urban Affairs Rev. 2006, 42, 3–25. [Google Scholar] [CrossRef]
- Xian, G.; Homer, C.; Fry, J. Updating the 2001 national land cover database impervious surface products to 2006 using landsat imagery change detection methods. Remote Sens. Environ. 2009, 113, 1133–1147. [Google Scholar] [CrossRef]
- Definiens AG. Definiens Developer 7 Reference Book; Definiens AG: Munich, Germany, 2007; p. 195. [Google Scholar]
- Moskal, L.M.; Franklin, S.E. Multi-layer forest stand discrimination with spatial co-occurrence texture analysis of high spatial detail airborne imagery. Geocarto Int. 2002, 17, 55–68. [Google Scholar] [CrossRef]
- Congalton, R.G.; Green, K. Assessing the Accuracy of Remotely Sensed Data: Principles and Practices, 2nd ed.; CRC Press, Taylor & Francis Group: Boca Raton, FL, USA, 2009; p. 183. [Google Scholar]
- Chen, Y.; Su, W.; Li, J.; Sun, Z. Hierarchical object oriented classification using Very High Resolution imagery and lidar data over urban areas. Adv. Space Res. 2009, 43, 1101–1110. [Google Scholar] [CrossRef]
- Ke, Y.; Quackenbush, L.J.; Im, J. Synergistic use of quickbird multispectral imagery and lidar data for object-based forest species classification. Remote Sens. Environ. 2010, 114, 1141–1154. [Google Scholar] [CrossRef]
- Erdody, T.L.; Moskal, L.M. Fusion of lidar and imagery for estimating forest canopy fuels. Remote Sens. Environ. 2010, 114, 725–737. [Google Scholar] [CrossRef]
- Guindon, B.; Zhang, Y.; Dillabaugh, C. Landsat urban mapping based on a combined spectral-spatial methodology. Remote Sens. Environ. 2004, 92, 218–232. [Google Scholar] [CrossRef]
- Walker, J.S.; Briggs, J.M. An object-oriented approach to urban forest mapping in Phoenix. Photogramm. Eng. Remote Sensing 2007, 73, 577–583. [Google Scholar] [CrossRef]
- Zhou, W.; Troy, A. Development of an object-based framework for classifying and inventorying human-dominated forest ecosystems. Int. J. Remote Sens. 2009, 30, 6343–6360. [Google Scholar] [CrossRef]
- Price, J. Spectral band selection for visible-near infrared remote sensing: Spectral-spatial resolution tradeoffs. IEEE Trans. Geosci. Remote Sens. 1997, 35, 1277–1285. [Google Scholar] [CrossRef]
- Nowak, D.J.; Crane, D.E.; Stevens, J.C.; Hoehn, R.E.; Walton, J.T.; Bond, J. A ground-based method of assessing urban forest structure and ecosystem services. Arboricul. Urban Forest. 2008, 34, 347–358. [Google Scholar]
- Goodchild, M. Citizens as sensors: The world of volunteered geography. GeoJournal 2007, 69, 211–221. [Google Scholar] [CrossRef]
© 2011 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Moskal, L.M.; Styers, D.M.; Halabisky, M. Monitoring Urban Tree Cover Using Object-Based Image Analysis and Public Domain Remotely Sensed Data. Remote Sens. 2011, 3, 2243-2262. https://doi.org/10.3390/rs3102243
Moskal LM, Styers DM, Halabisky M. Monitoring Urban Tree Cover Using Object-Based Image Analysis and Public Domain Remotely Sensed Data. Remote Sensing. 2011; 3(10):2243-2262. https://doi.org/10.3390/rs3102243
Chicago/Turabian StyleMoskal, L. Monika, Diane M. Styers, and Meghan Halabisky. 2011. "Monitoring Urban Tree Cover Using Object-Based Image Analysis and Public Domain Remotely Sensed Data" Remote Sensing 3, no. 10: 2243-2262. https://doi.org/10.3390/rs3102243
APA StyleMoskal, L. M., Styers, D. M., & Halabisky, M. (2011). Monitoring Urban Tree Cover Using Object-Based Image Analysis and Public Domain Remotely Sensed Data. Remote Sensing, 3(10), 2243-2262. https://doi.org/10.3390/rs3102243