
The Identification of Exposed Beachrocks on South China Sea Islands Based on UAV Images


Abstract
1. Introduction
2. Materials and Methods
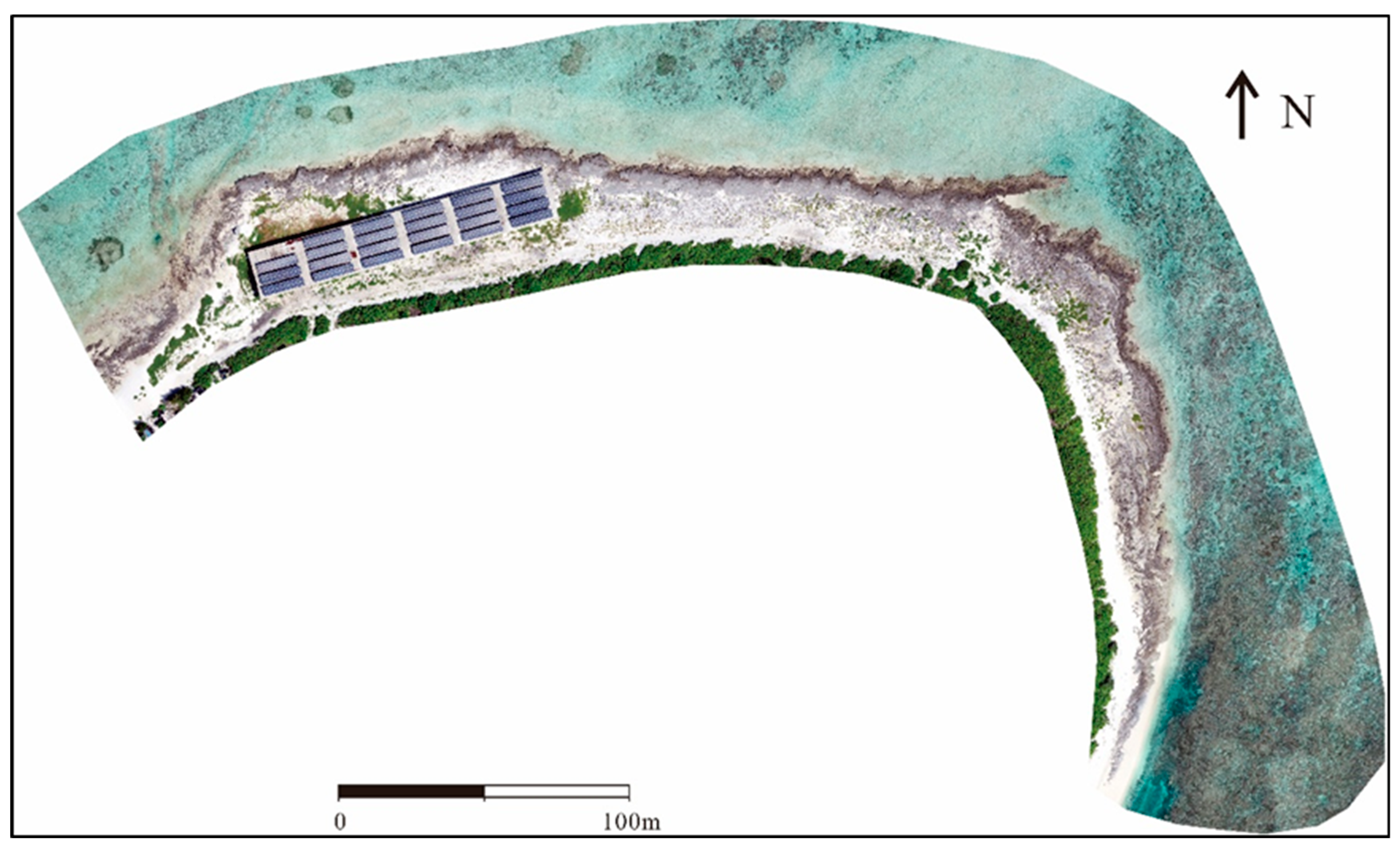
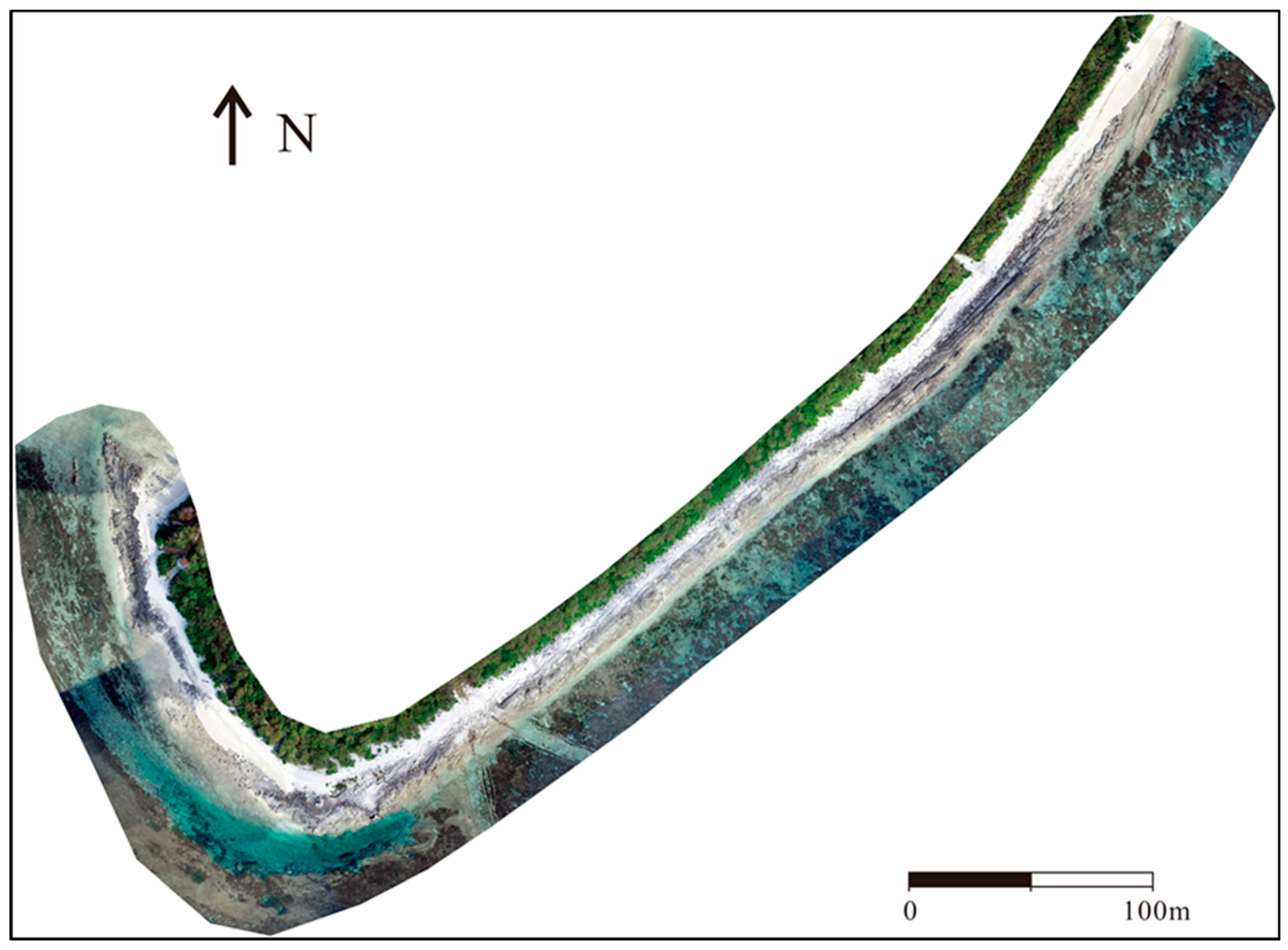
2.1. Data Sources
2.2. Dataset Construction
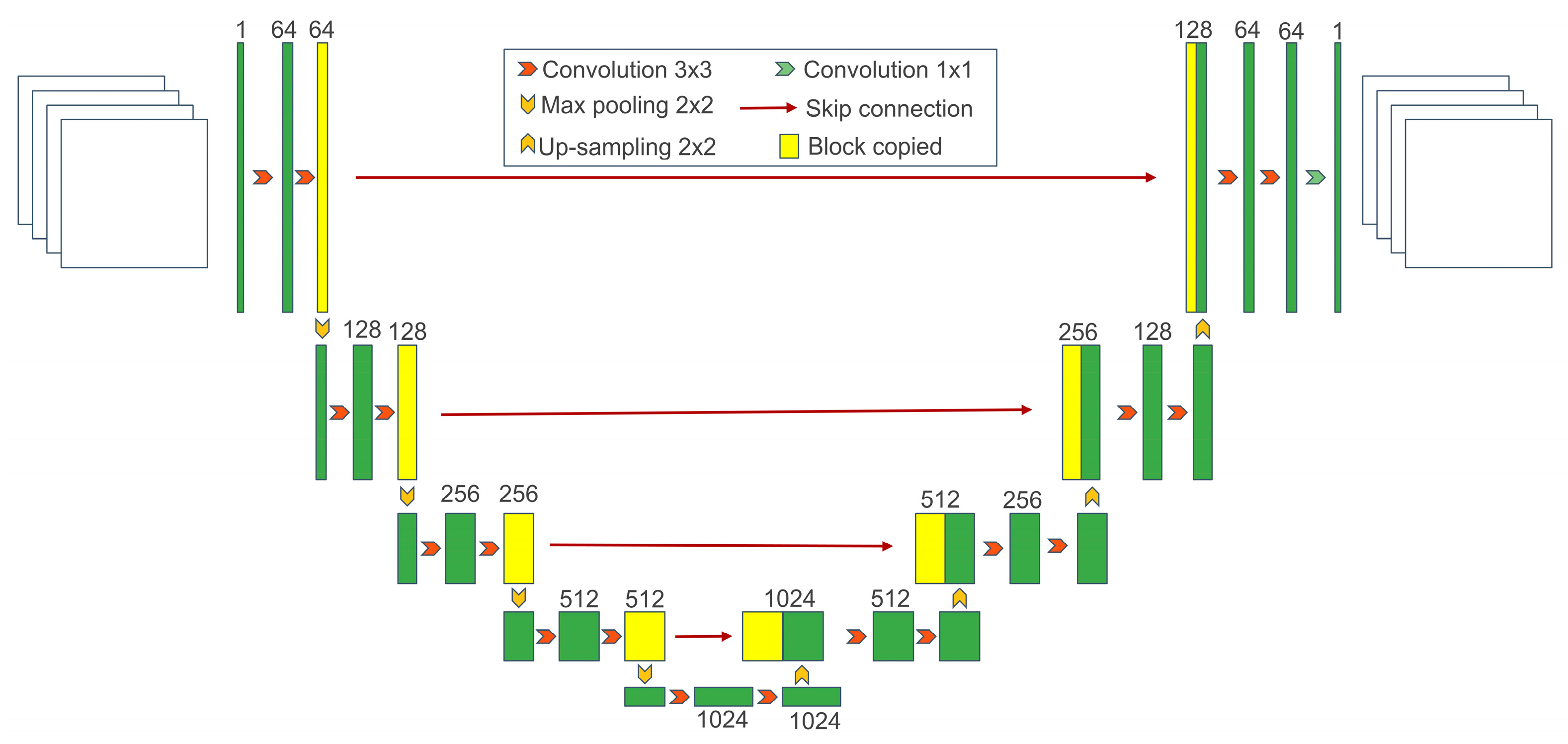
2.3. Traditional U-Net Network Model
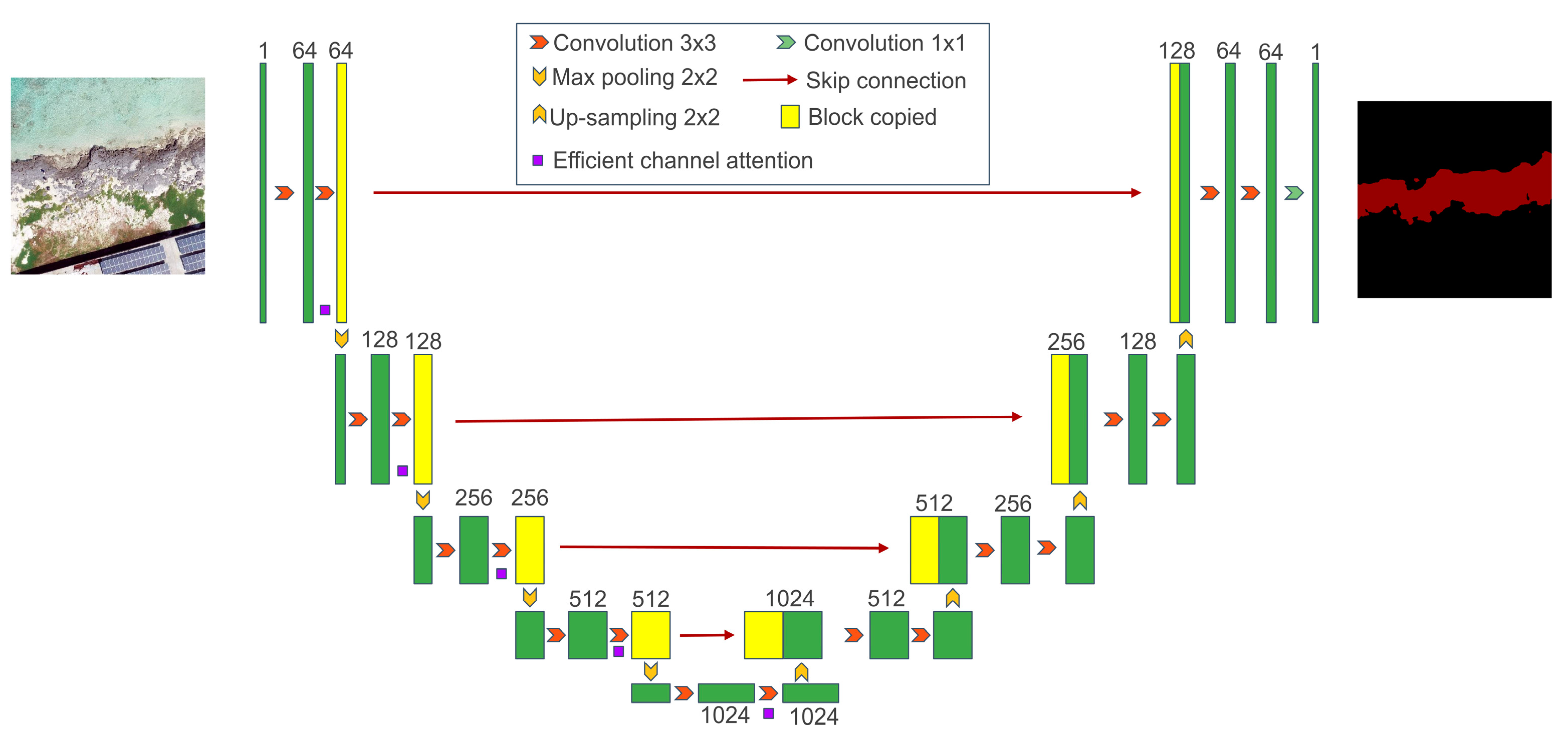
2.4. Beachrocks Semantic Segmentation Model
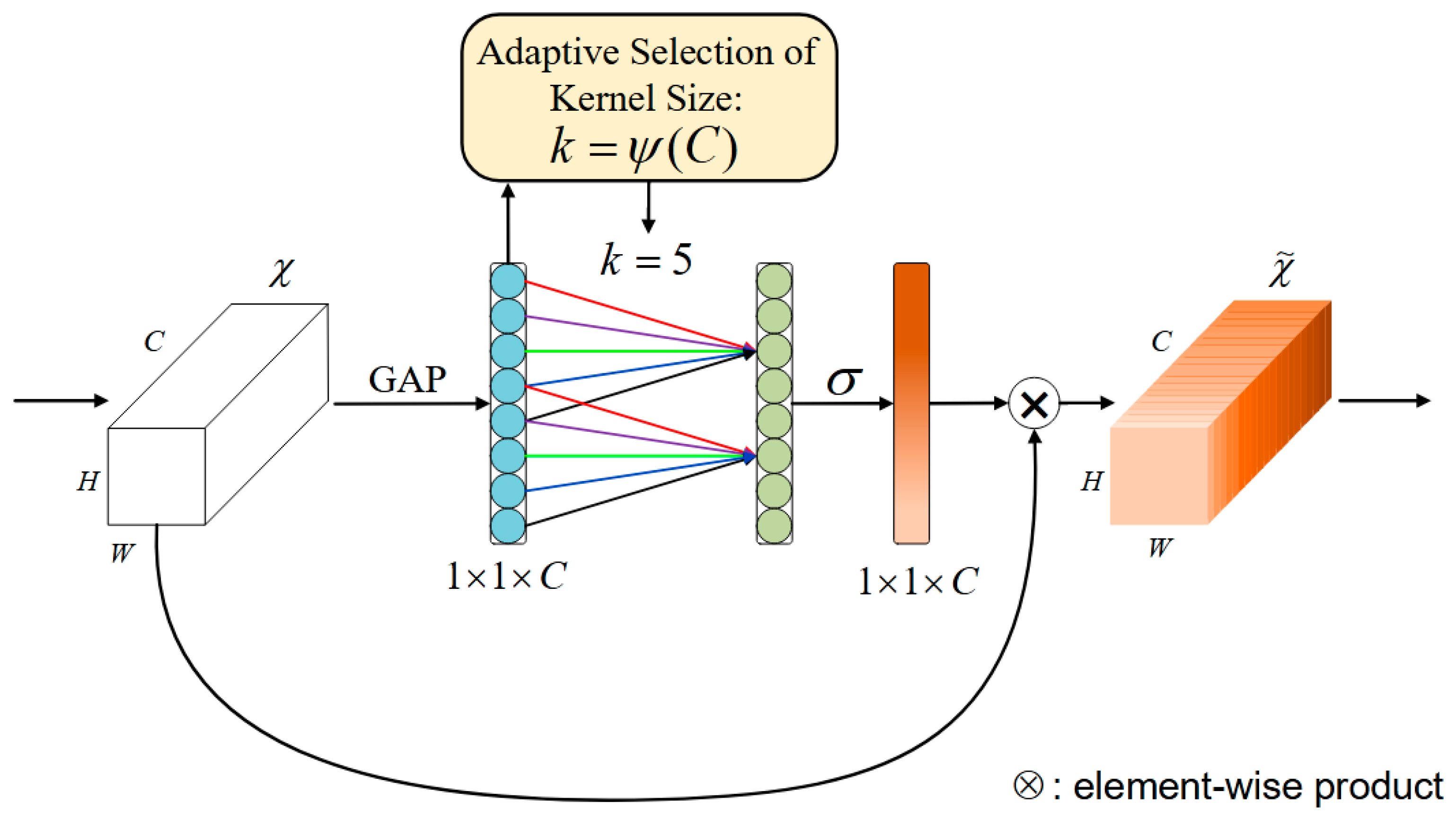
2.5. ECA Module
2.6. Experimental Environment
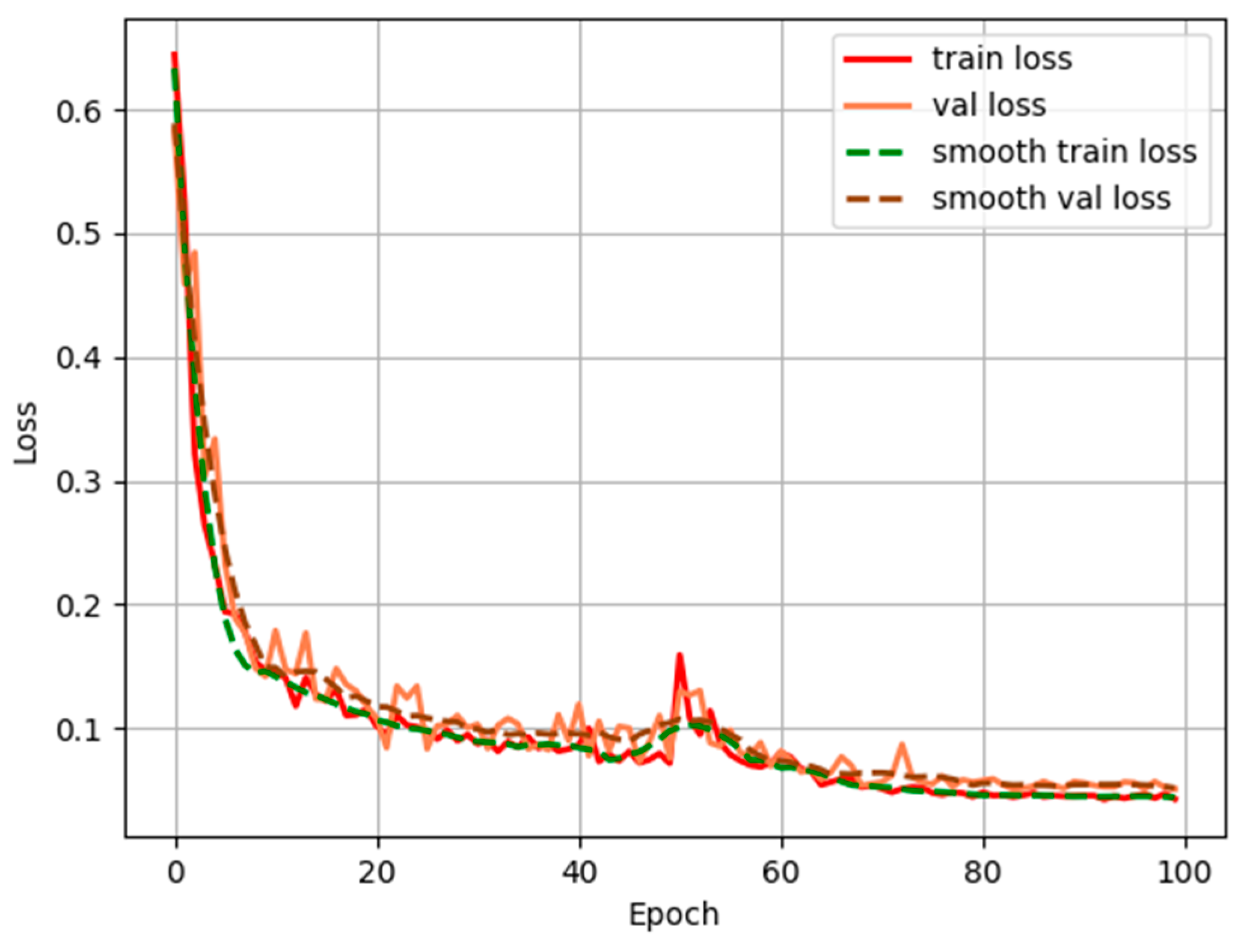
2.7. Training Parameters
3. Results
3.1. Model Evaluation Metrics
3.2. Model Performance Evaluation
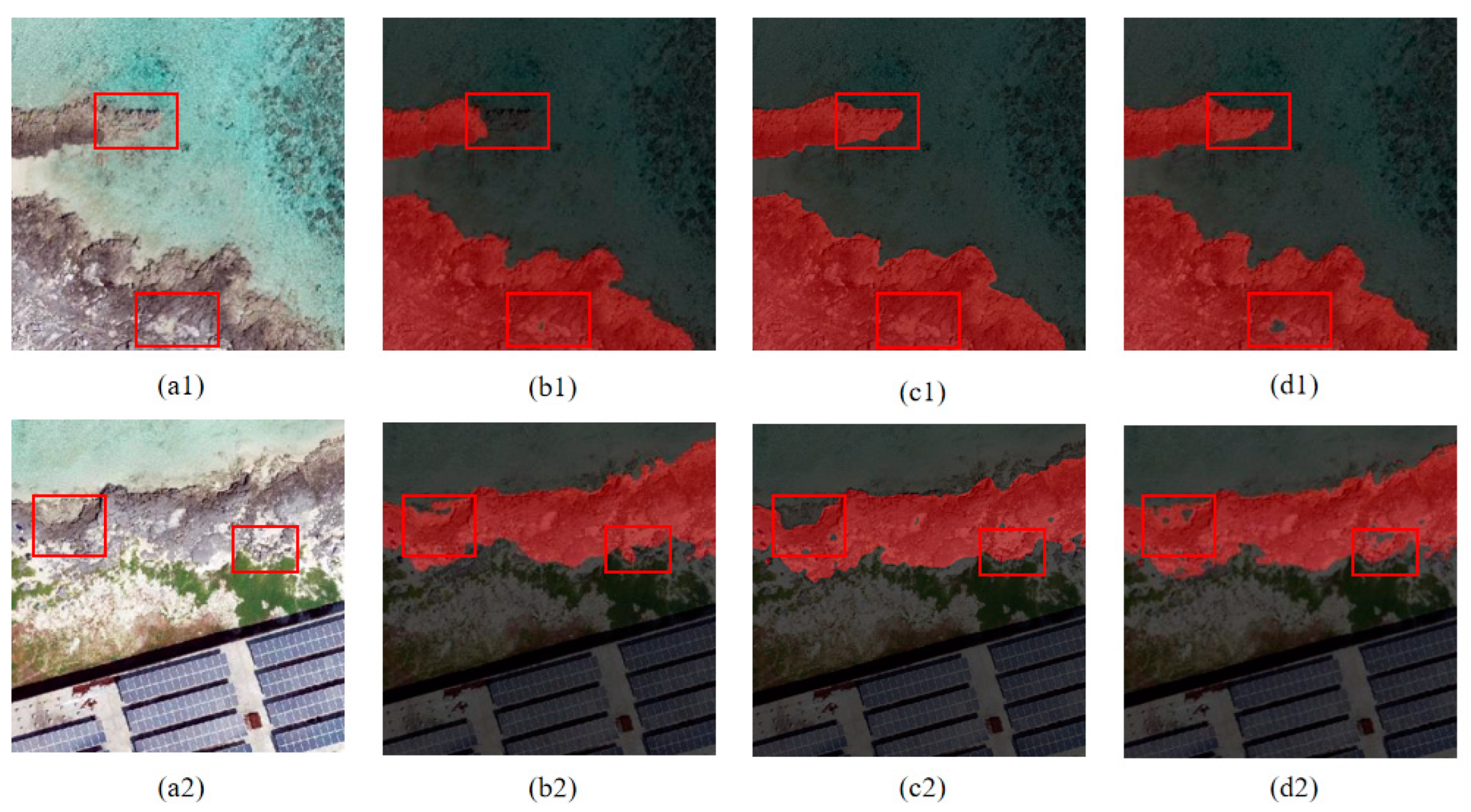
3.3. Comparison of Model Before and After Improvement
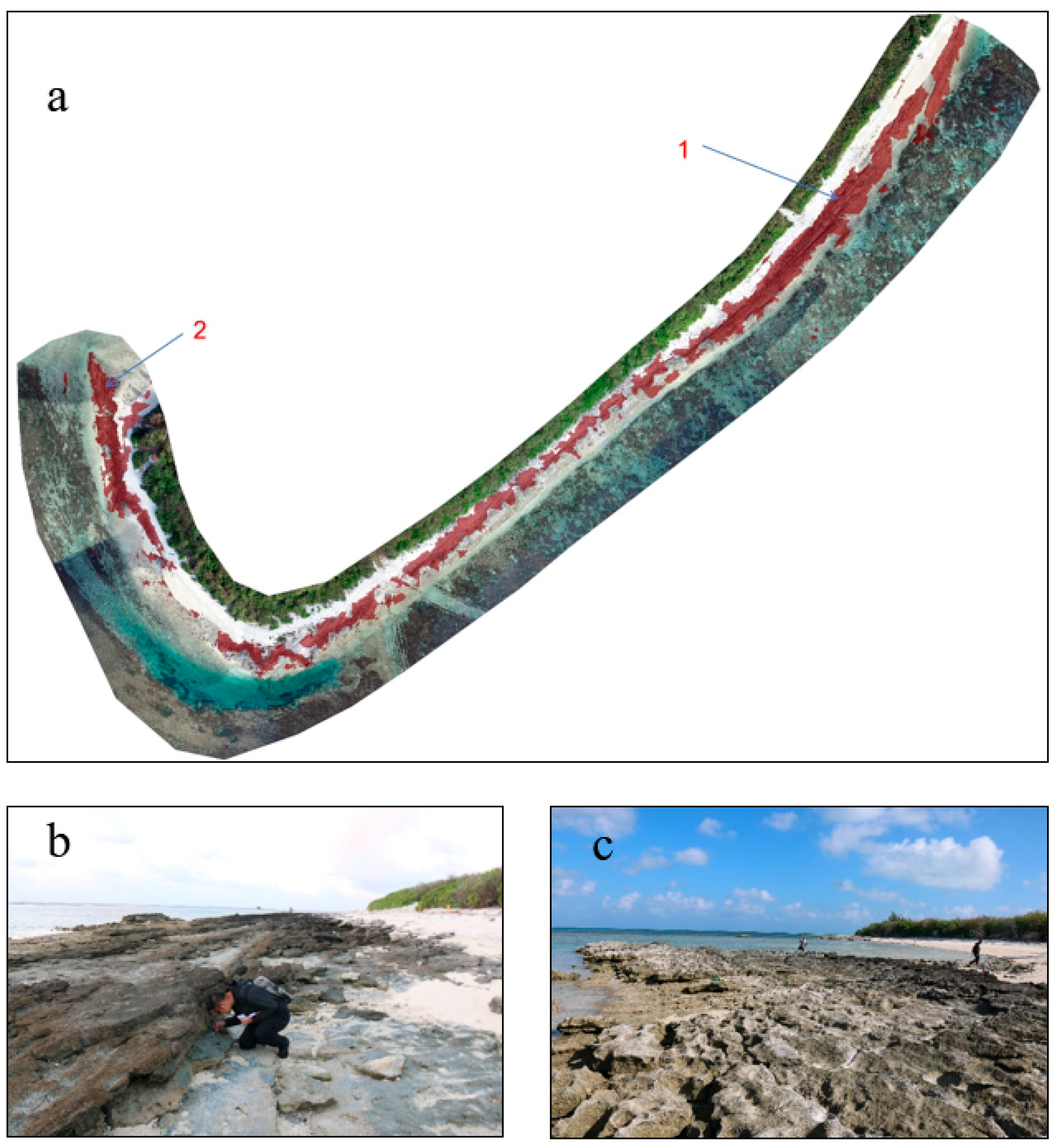
3.4. Model Application Example
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Vousdoukas, M.I.; Velegrakis, A.F.; Plomaritis, T.A. Beachrock Occurrence, Characteristics, Formation Mechanisms and Impacts. Earth-Sci. Rev. 2007, 85, 23–46. [Google Scholar] [CrossRef]
- Danjo, T.; Kawasaki, S. Characteristics of Beachrocks: A Review. Geotech. Geol. Eng. 2014, 32, 215–246. [Google Scholar] [CrossRef]
- Lin, Y.; Liang, D.; Wei, C.; Lü, Z.; Wu, D.; Huang, W.; Xu, G.; Du, J. Geochemical characteristics of Late Pleistocene beach rocks in northwest Hainan Island and their paleoenvironment implications. Sci. Technol. Eng. 2023, 23, 4079–4090. (In Chinese) [Google Scholar]
- Riding, R. Structure and Composition of Organic Reefs and Carbonate Mud Mounds: Concepts and Categories. Earth-Sci. Rev. 2002, 58, 163–231. [Google Scholar] [CrossRef]
- Li, M.; Zhang, H.; Gruen, A.; Li, D. A Survey on Underwater Coral Image Segmentation Based on Deep Learning. Geo-Spat. Inf. Sci. 2024, 1–25. [Google Scholar] [CrossRef]
- Zhou, M.; Liu, Y.; Li, M.; Sun, C.; Zou, W. Geomorphologic information extraction for multi-objective coral islands from remotely sensed imagery: A case study for Yongle Atoll, South China Sea. Geogr. Res. 2015, 34, 677–690. (In Chinese) [Google Scholar] [CrossRef]
- Zuo, X.; Su, F.; Zhao, H.; Fang, Y.; Yang, J. Development of a geomorphic classification scheme for coral reefs in the South China Sea based on high-resolution satellite images. Prog. Geogr. 2018, 37, 1463–1472. (In Chinese) [Google Scholar] [CrossRef]
- Dong, J.; Ren, G.; Hu, Y.; Pang, J.; Ma, Y. Construction and classification of coral reef geomorphic unit system based on high-resolution remote sensing: Using 8-band Worldview-2 Image as an example. J. Trop. Oceanogr. 2020, 39, 116–129. (In Chinese) [Google Scholar]
- King, A.; Bhandarkar, S.M.; Hopkinson, B.M. A Comparison of Deep Learning Methods for Semantic Segmentation of Coral Reef Survey Images. In Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), Salt Lake City, UT, USA, 18–22 June 2018; pp. 1475–14758. [Google Scholar]
- Li, J.; Knapp, D.E.; Fabina, N.S.; Kennedy, E.V.; Larsen, K.; Lyons, M.B.; Murray, N.J.; Phinn, S.R.; Roelfsema, C.M.; Asner, G.P. A Global Coral Reef Probability Map Generated Using Convolutional Neural Networks. Coral Reefs 2020, 39, 1805–1815. [Google Scholar] [CrossRef]
- González-Rivero, M.; Beijbom, O.; Rodriguez-Ramirez, A.; Bryant, D.E.P.; Ganase, A.; Gonzalez-Marrero, Y.; Herrera-Reveles, A.; Kennedy, E.V.; Kim, C.J.S.; Lopez-Marcano, S.; et al. Monitoring of Coral Reefs Using Artificial Intelligence: A Feasible and Cost-Effective Approach. Remote Sens. 2020, 12, 489. [Google Scholar] [CrossRef]
- Zheng, Z.; Yang, C.; Zhao, J.; Feng, Y. Remote Sensing Geological Classification of Sea Islands and Reefs Based on Deeplabv3 +. In Proceedings of the 2022 7th International Conference on Intelligent Computing and Signal Processing (ICSP), Virtual, 15–17 April 2022; pp. 1907–1910. [Google Scholar]
- Ma, Z.; Song, Y.; Zou, Y.; Zhu, H.; Cui, S. Remote sensing information extraction of coral reefs in Yongle Islands of Xisha based on deep learning. J. Appl. Oceanogr. 2022, 41, 644–654. [Google Scholar] [CrossRef]
- Turner, I.L.; Harley, M.D.; Drummond, C.D. UAVs for Coastal Surveying. Coast. Eng. 2016, 114, 19–24. [Google Scholar] [CrossRef]
- Liang, X.; Dai, Z.; Huang, H.; Wang, J.; Li, S.; Wang, R.; Pang, W. Elevation Inversion of Mangrove Tidal Flat Geomorphology Based on UAV Aerial Survey. Adv. Mar. Sci. 2024, 42, 384–399. [Google Scholar] [CrossRef]
- Aspragkathos, S.N.; Karras, G.C.; Kyriakopoulos, K.J. A Hybrid Model and Data-Driven Vision-Based Framework for the Detection, Tracking and Surveillance of Dynamic Coastlines Using a Multirotor UAV. Drones 2022, 6, 146. [Google Scholar] [CrossRef]
- Ružić, I.; Benac, Č.; Jovančević, S.D.; Radišić, M. The Application of UAV for the Analysis of Geological Hazard in Krk Island, Croatia, Mediterranean Sea. Remote Sens. 2021, 13, 1790. [Google Scholar] [CrossRef]
- Giordano, C.M.; Girelli, V.A.; Lambertini, A.; Tini, M.A.; Zanutta, A. UAV Data Collection Co-Registration: LiDAR and Photogrammetric Surveys for Coastal Monitoring. Drones 2025, 9, 49. [Google Scholar] [CrossRef]
- Nikolakopoulos, K.G.; Lampropoulou, P.; Fakiris, E.; Sardelianos, D.; Papatheodorou, G. Synergistic Use of UAV and USV Data and Petrographic Analyses for the Investigation of Beachrock Formations: A Case Study from Syros Island, Aegean Sea, Greece. Minerals 2018, 8, 534. [Google Scholar] [CrossRef]
- Nikolakopoulos, K.G.; Koukouvelas, I.K.; Lampropoulou, P. UAV, GIS, and Petrographic Analysis for Beachrock Mapping and Preliminary Analysis in the Compressional Geotectonic Setting of Epirus, Western Greece. Minerals 2022, 12, 392. [Google Scholar] [CrossRef]
- Everingham, M.; Van Gool, L.; Williams, C.K.I.; Winn, J.; Zisserman, A. The Pascal Visual Object Classes (VOC) Challenge. Int. J. Comput. Vis. 2010, 88, 303–338. [Google Scholar] [CrossRef]
- Ronneberger, O.; Fischer, P.; Brox, T. U-Net: Convolutional Networks for Biomedical Image Segmentation. In Medical Image Computing and Computer-Assisted Intervention—MICCAI 2015, Proceedings of the 18th International Conference, Munich, Germany, 5–9 October 2015; Navab, N., Hornegger, J., Wells, W.M., Frangi, A.F., Eds.; Springer International Publishing: Cham, Switzerland, 2015; pp. 234–241. [Google Scholar]
- Long, J.; Shelhamer, E.; Darrell, T. Fully Convolutional Networks for Semantic Segmentation. In Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 7–12 June 2015; pp. 3431–3440. [Google Scholar]
- Liu, P.; Wang, C.; Ye, M.; Han, R. Coastal Zone Classification Based on U-Net and Remote Sensing. Appl. Sci. 2024, 14, 7050. [Google Scholar] [CrossRef]
- Wang, Y.; Zhang, Y.; Wang, G. Impact of Physical and Attention Mechanisms on U-Net for SST Forecasting. Intell. Mar. Technol. Syst. 2024, 2, 11. [Google Scholar] [CrossRef]
- Li, T.; Song, J.; Song, Z.; Ablimit, A.; Chen, L. Removing Nonrigid Refractive Distortions for Underwater Images Using an Attention-Based Deep Neural Network. Intell. Mar. Technol. Syst. 2024, 2, 25. [Google Scholar] [CrossRef]
- Guo, M.-H.; Xu, T.-X.; Liu, J.-J.; Liu, Z.-N.; Jiang, P.-T.; Mu, T.-J.; Zhang, S.-H.; Martin, R.R.; Cheng, M.-M.; Hu, S.-M. Attention Mechanisms in Computer Vision: A Survey. Comp. Visual Media 2022, 8, 331–368. [Google Scholar] [CrossRef]
- Hu, J.; Shen, L.; Sun, G. Squeeze-and-Excitation Networks. In Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 7132–7141. [Google Scholar]
- Wang, Q.; Wu, B.; Zhu, P.; Li, P.; Zuo, W.; Hu, Q. ECA-Net: Efficient Channel Attention for Deep Convolutional Neural Networks. In Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 13–19 June 2020; pp. 11531–11539. [Google Scholar]
- Milletari, F.; Navab, N.; Ahmadi, S.-A. V-Net: Fully Convolutional Neural Networks for Volumetric Medical Image Segmentation. In Proceedings of the 2016 Fourth International Conference on 3D Vision (3DV), Stanford, CA, USA, 25–28 October 2016; pp. 565–571. [Google Scholar]
- Yeung, M.; Sala, E.; Schönlieb, C.-B.; Rundo, L. Unified Focal Loss: Generalising Dice and Cross Entropy-Based Losses to Handle Class Imbalanced Medical Image Segmentation. Comput. Med. Imaging Graph. 2022, 95, 102026. [Google Scholar] [CrossRef]
- Kingma, D.P.; Ba, J. Adam: A Method for Stochastic Optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar]
- Ruder, S. An Overview of Gradient Descent Optimization Algorithms. arXiv 2016, arXiv:1609.04747. [Google Scholar]
- Lei, J.; Liu, X.; Yang, H.; Zeng, Z.; Feng, J. Dual Hybrid Attention Mechanism-Based U-Net for Building Segmentation in Remote Sensing Images. Appl. Sci. 2024, 14, 1293. [Google Scholar] [CrossRef]
- Matthews, B.W. Comparison of the Predicted and Observed Secondary Structure of T4 Phage Lysozyme. Biochim. Biophys. Acta (BBA)—Protein Struct. 1975, 405, 442–451. [Google Scholar] [CrossRef]
- Chicco, D.; Jurman, G. The Advantages of the Matthews Correlation Coefficient (MCC) over F1 Score and Accuracy in Binary Classification Evaluation. BMC Genom. 2020, 21, 6. [Google Scholar] [CrossRef]
- Chicco, D.; Tötsch, N.; Jurman, G. The Matthews Correlation Coefficient (MCC) Is More Reliable than Balanced Accuracy, Bookmaker Informedness, and Markedness in Two-Class Confusion Matrix Evaluation. BioData Min. 2021, 14, 13. [Google Scholar] [CrossRef]
- Cheng, J.; Deng, C.; Su, Y.; An, Z.; Wang, Q. Methods and Datasets on Semantic Segmentation for Unmanned Aerial Vehicle Remote Sensing Images: A Review. ISPRS J. Photogramm. Remote Sens. 2024, 211, 1–34. [Google Scholar] [CrossRef]
- Ahmed, S.A.; Desa, H.; Easa, H.K.; Hussain, A.-S.T.; Taha, T.A.; Salih, S.Q.; Hasan, R.A.; Ahmed, O.K.; Ng, P.S.J. Advancements in UAV Image Semantic Segmentation: A Comprehensive Literature Review. Multidiscip. Rev. 2024, 7, 2024118. [Google Scholar] [CrossRef]
- Osco, L.P.; Junior, J.M.; Ramos, A.P.M.; de Castro Jorge, L.A.; Fatholahi, S.N.; de Andrade Silva, J.; Matsubara, E.T.; Pistori, H.; Gonçalves, W.N.; Li, J. A Review on Deep Learning in UAV Remote Sensing. Int. J. Appl. Earth Obs. Geoinf. 2021, 102, 102456. [Google Scholar] [CrossRef]
- Huang, L.; Meng, J.; Fan, C.; Zhang, J.; Yang, J. Shallow Sea Topography Detection from Multi-Source SAR Satellites: A Case Study of Dazhou Island in China. Remote Sens. 2022, 14, 5184. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Predicted Positive | Predicted Negative | |
|---|---|---|
| Actual Positive | True Positive | False Negative |
| Actual Negative | False Positive | True Negative |
| Predicted Positive | Predicted Negative | |
|---|---|---|
| Actual Positive | TP = 1,122,515 | FN = 59,497 |
| Actual Negative | FP = 79,849 | TN = 5,029,595 |
| Metrics | Value |
|---|---|
| Accuracy (CCR)/% | 97.79 |
| Precision (PRE)/% | 93.35 |
| Recall/% | 94.96 |
| F1-score/% | 94.25 |
| IoU/% | 88.98 |
| MCC | 0.928 |
| Loss | 0.051 |
| Predicted Positive | Predicted Negative | |
|---|---|---|
| Actual Positive | TP = 1,221,179 | FN = 81,184 |
| Actual Negative | FP = 108,324 | TN = 4,880,769 |
| Predicted Positive | Predicted Negative | |
|---|---|---|
| Actual Positive | TP = 1,242,143 | FN = 79,524 |
| Actual Negative | FP = 91,322 | TN = 4,874,467 |
| Predicted Positive | Predicted Negative | |
|---|---|---|
| Actual Positive | TP = 1,253,127 | FN = 65,239 |
| Actual Negative | FP = 86,873 | TN = 4,895,217 |
| Metrics | Value | ||
|---|---|---|---|
| Traditional U-Net | Deeplabv3+ | Improved U-Net | |
| Accuracy (CCR)/% | 96.98 ± 0.29 | 97.28 ± 0.25 | 97.47 ± 0.27 |
| Precision (PRE)/% | 91.86 ± 0.33 | 93.16 ± 0.29 | 93.27 ± 0.29 |
| Recall/% | 93.76 ± 0.41 | 93.94 ± 0.44 | 94.73 ± 0.39 |
| F1-score/% | 92.85 ± 0.38 | 93.68 ± 0.31 | 93.95 ± 0.34 |
| IoU/% | 86.56 ± 0.47 | 87.93 ± 0.42 | 88.65 ± 0.41 |
| MCC | 0.909 ± 0.015 | 0.926 ± 0.012 | 0.924 ± 0.011 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, C.; Gao, W.; Xing, J.; Gong, W. The Identification of Exposed Beachrocks on South China Sea Islands Based on UAV Images. Remote Sens. 2025, 17, 1647. https://doi.org/10.3390/rs17091647
Liu C, Gao W, Xing J, Gong W. The Identification of Exposed Beachrocks on South China Sea Islands Based on UAV Images. Remote Sensing. 2025; 17(9):1647. https://doi.org/10.3390/rs17091647
Chicago/Turabian StyleLiu, Chuang, Wei Gao, Junhui Xing, and Wei Gong. 2025. "The Identification of Exposed Beachrocks on South China Sea Islands Based on UAV Images" Remote Sensing 17, no. 9: 1647. https://doi.org/10.3390/rs17091647
APA StyleLiu, C., Gao, W., Xing, J., & Gong, W. (2025). The Identification of Exposed Beachrocks on South China Sea Islands Based on UAV Images. Remote Sensing, 17(9), 1647. https://doi.org/10.3390/rs17091647