
Analysis, Simulation, and Scanning Geometry Calibration of Palmer Scanning Units for Airborne Hyperspectral Light Detection and Ranging




Abstract
1. Introduction
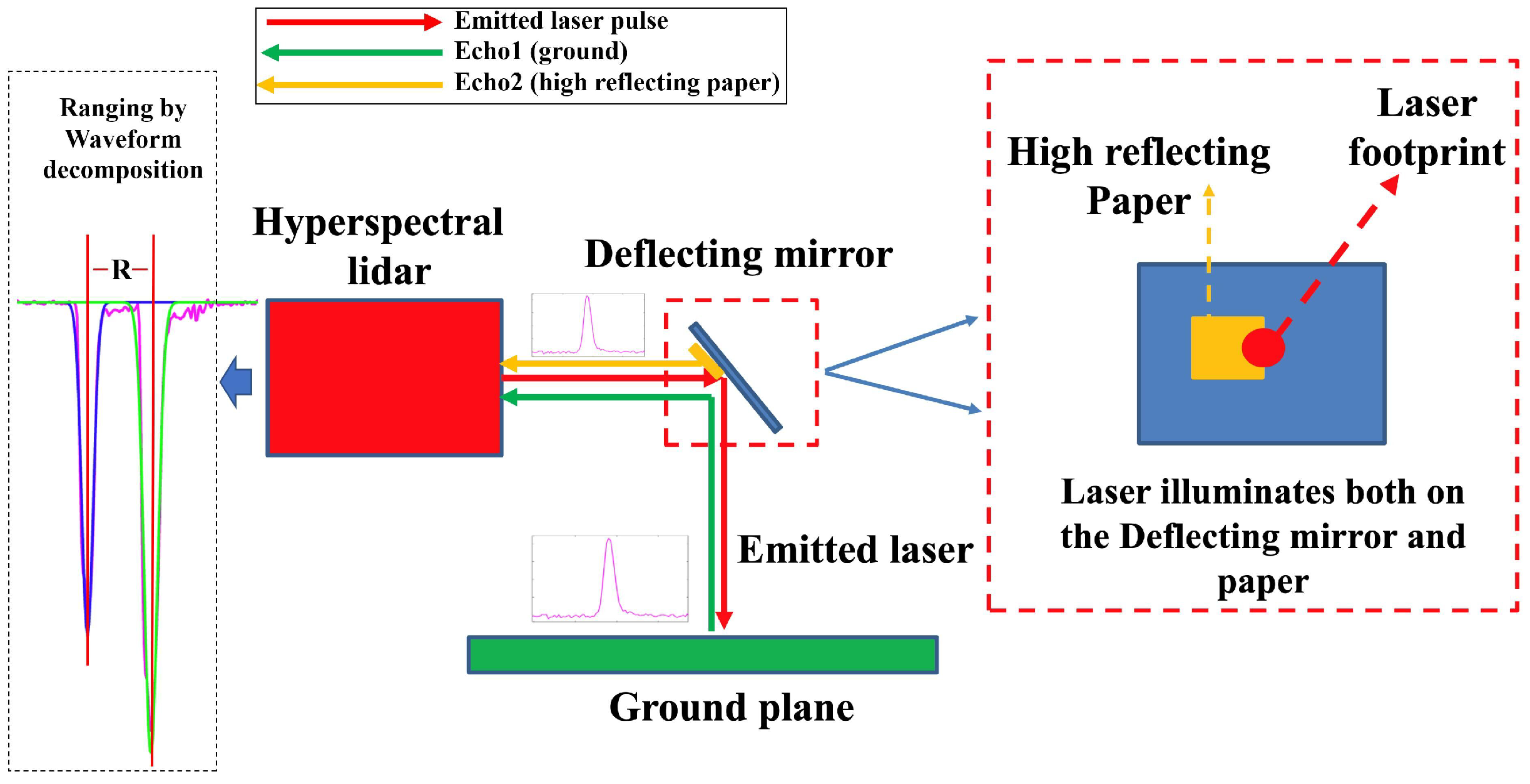
- An indoor self-orientation element measurement method is proposed. This method utilizes the indoor self-ranging feature of AHSL, owing to its sizable optical aperture, which obtains the distance and position of the laser points
- The linear residual estimated interpolation (LREI) method is used to obtain the whole scanning trace (with the orientation elements at all scanning angles recorded), and integrating the linear residual estimation interpolation method with a simulation of the Palmer scan model is proposed to improve the precision and maintain the features of the ellipse-like pattern produced by the Palmer scan.
- Least-deviated flatness optimization (LDFO) is proposed for iteratively calibrating the offset of the scanning angle. The effect of the angle offset on the geometry of the scanning trace is explored through simulation of the Palmer scan model. LDFO integrates a point cloud of the horizontal ground plane as the data input accounting for the restriction of the LREI method to iteratively optimize the calibration.
2. Materials
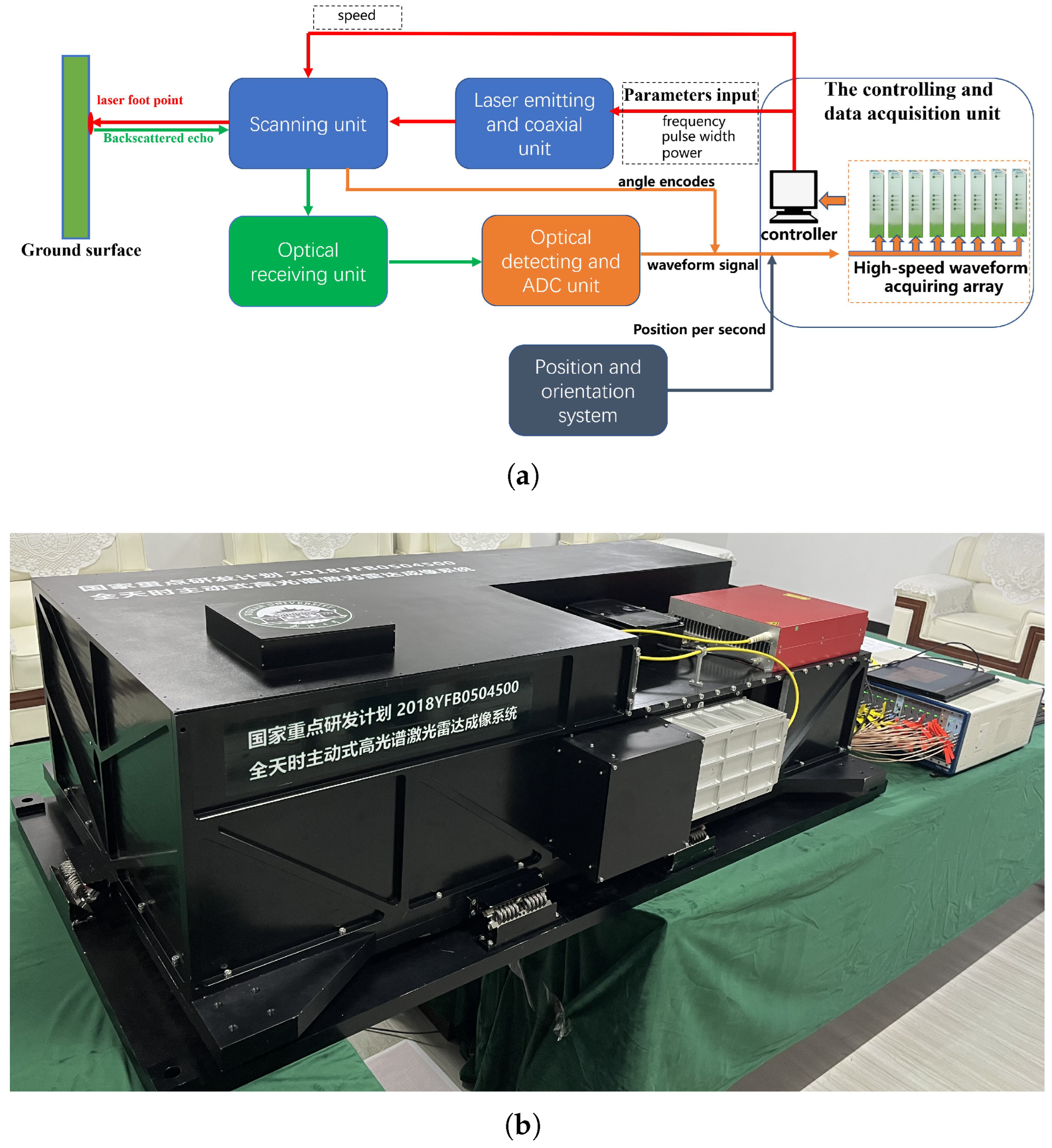
2.1. The Airborne Hyperspectral LiDAR System
2.2. An Analysis of the Scanning Methods for AHSL
2.2.1. The Typical Scanning Methods for ASL
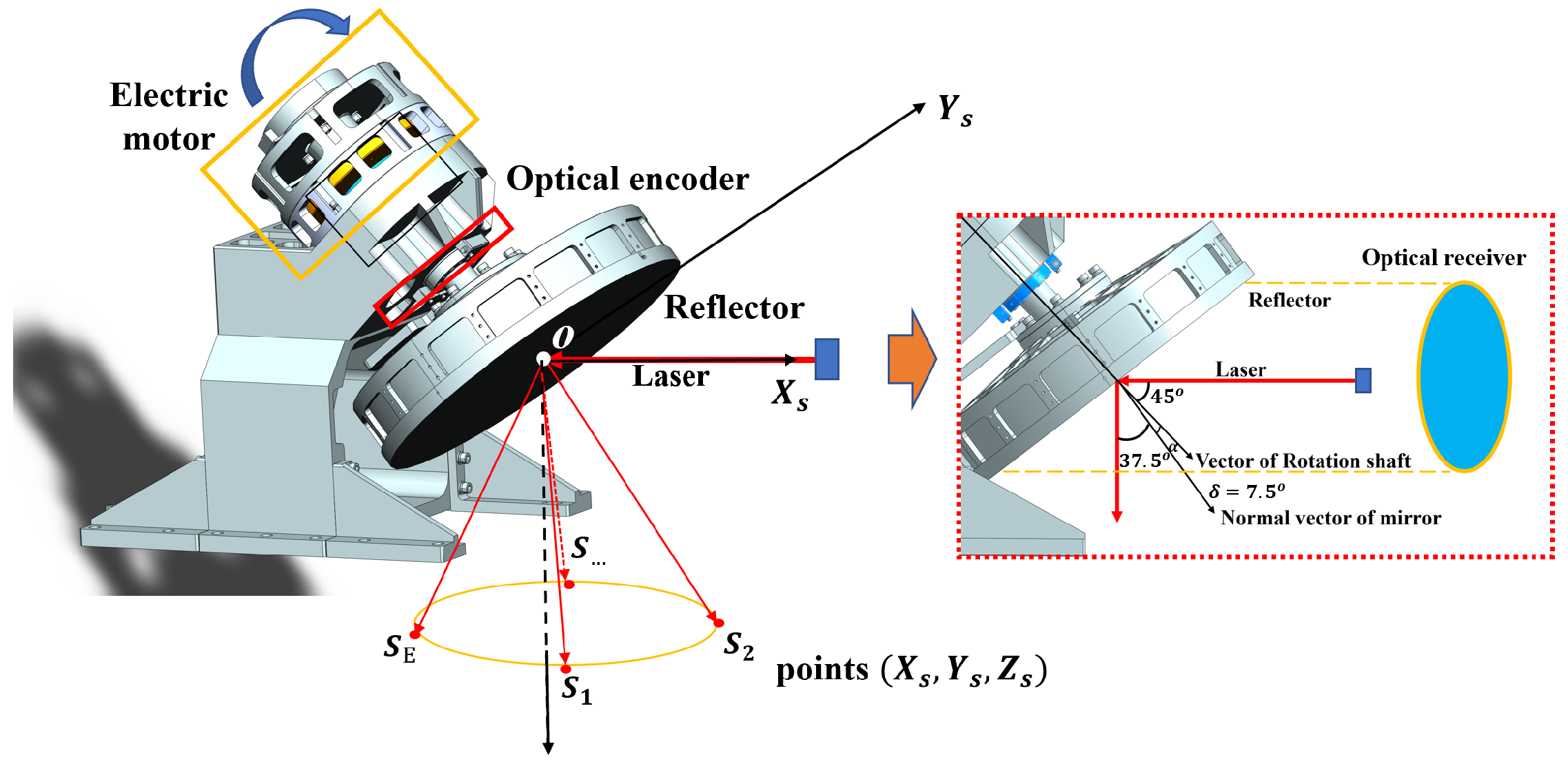
2.2.2. A Palmer Scanning Unit for AHSL
3. Methods
3.1. A Palmer Scanning Model
3.1.1. Palmer Scanning Geometry
3.1.2. Airborne Palmer Scanning Simulation
3.2. Scanning Geometry Calibration
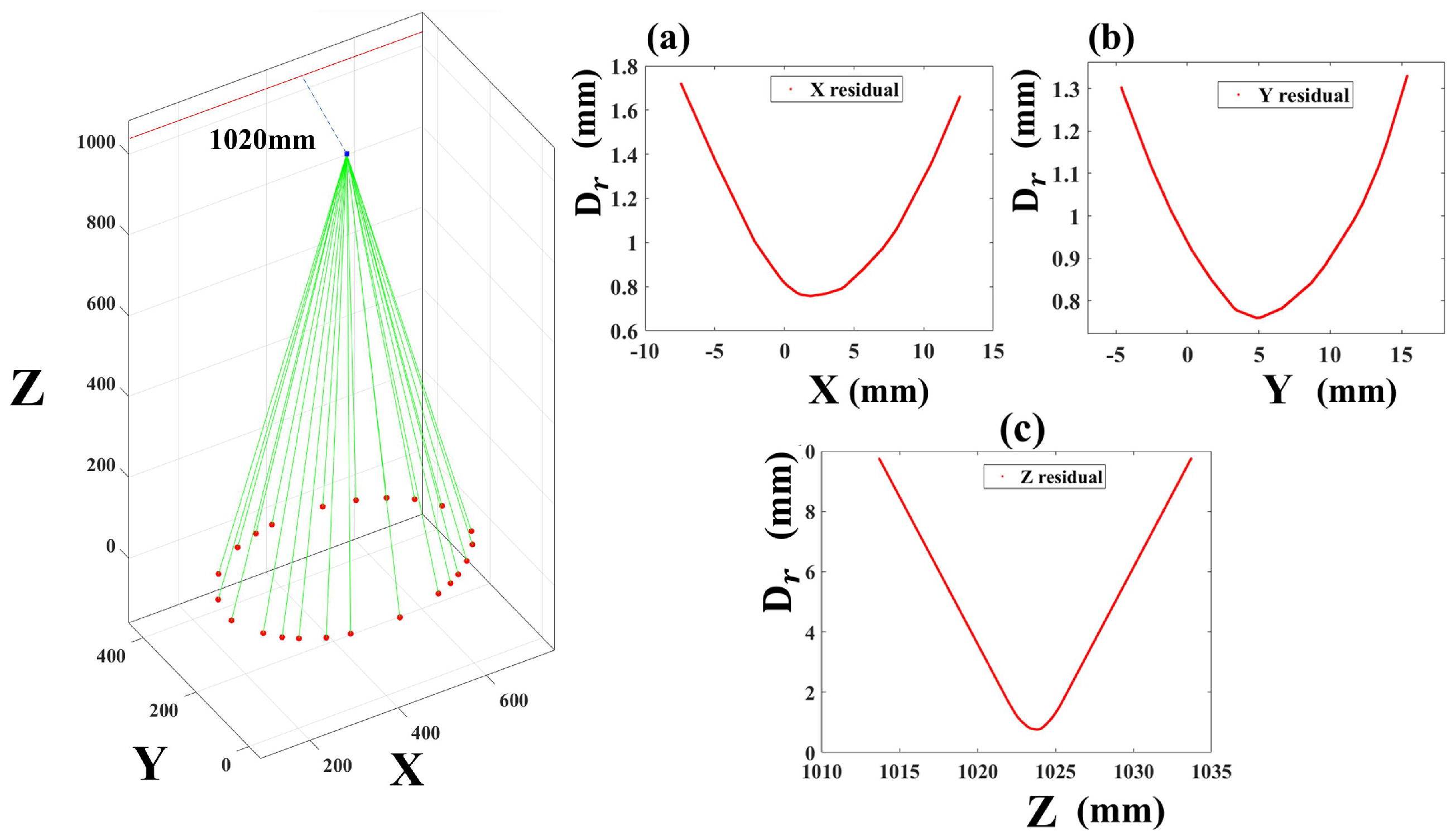
3.2.1. Strategy for Measuring Indoor Self-Orientation Elements
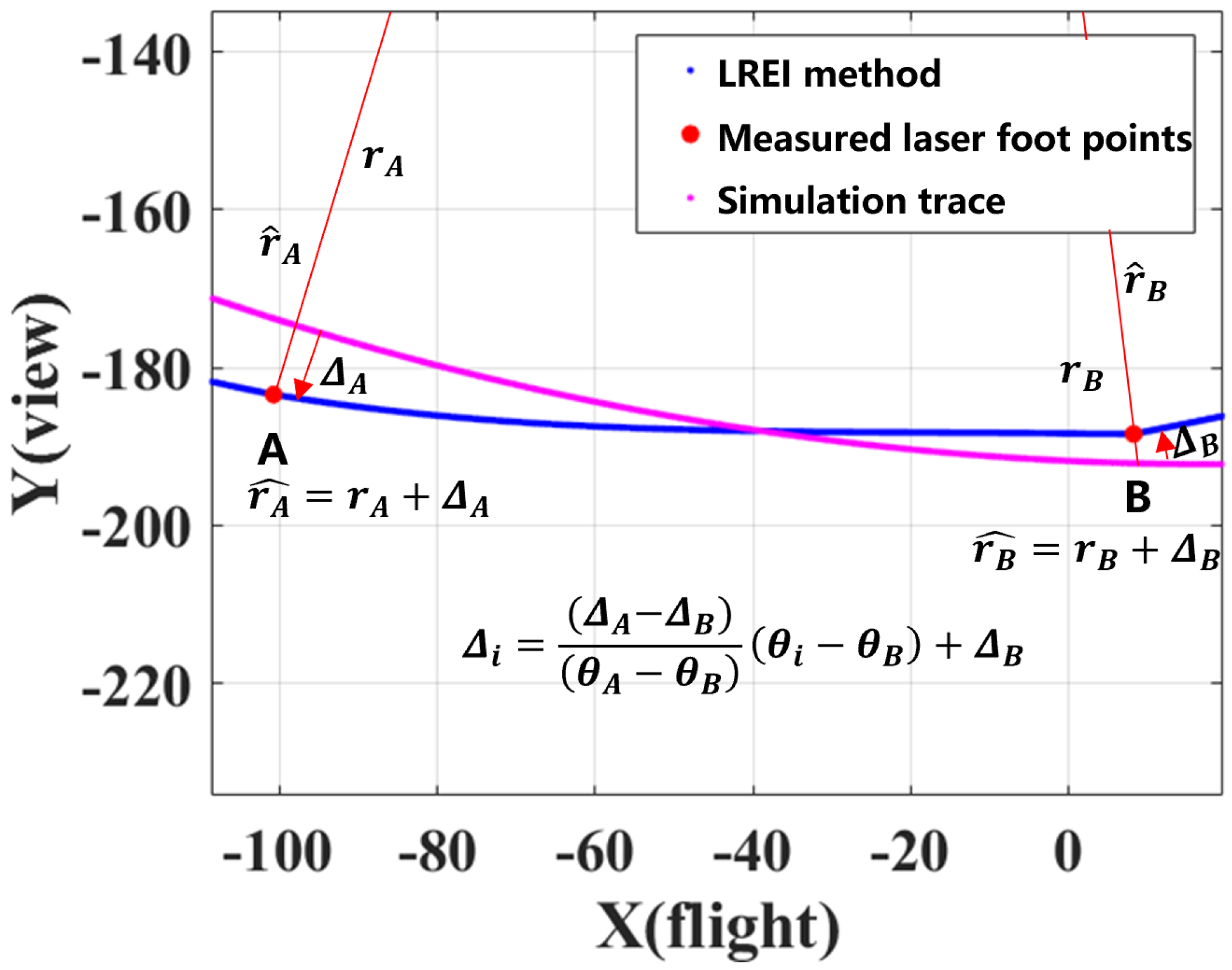
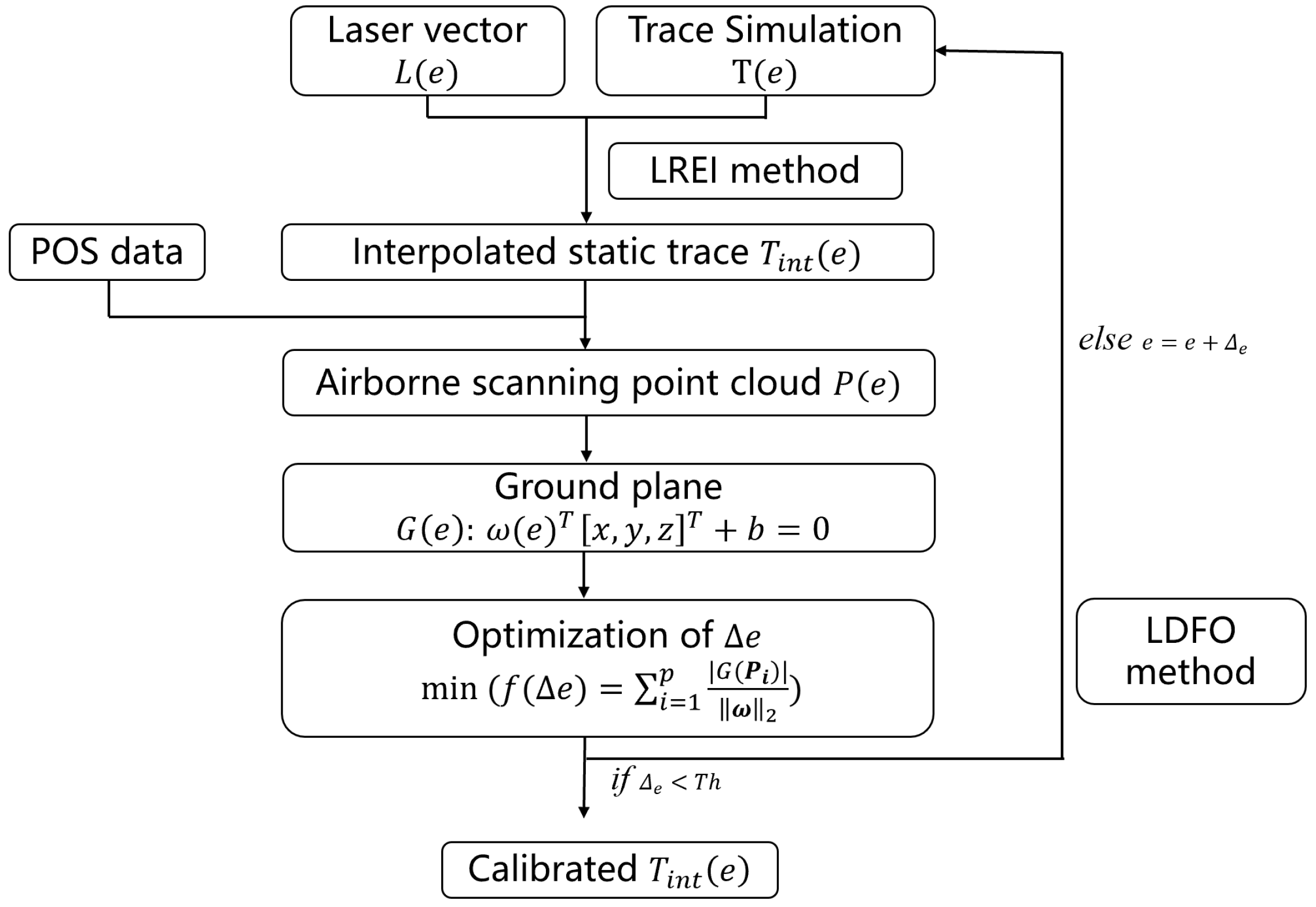
3.2.2. Linear Residual Estimated Interpolation (LREI) for Scanning Traces
3.2.3. Least-Deviated Flatness Optimization (LDFO) for Angle Offset Calibration
3.3. The Experimental Setting
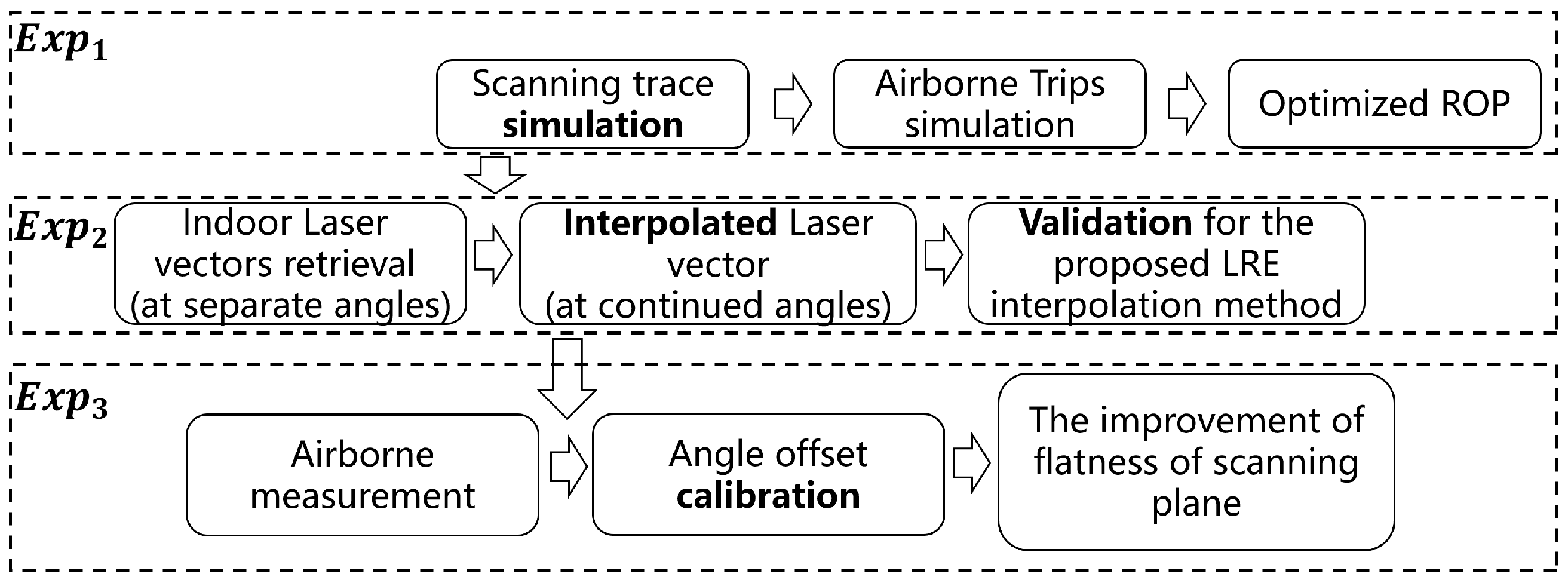
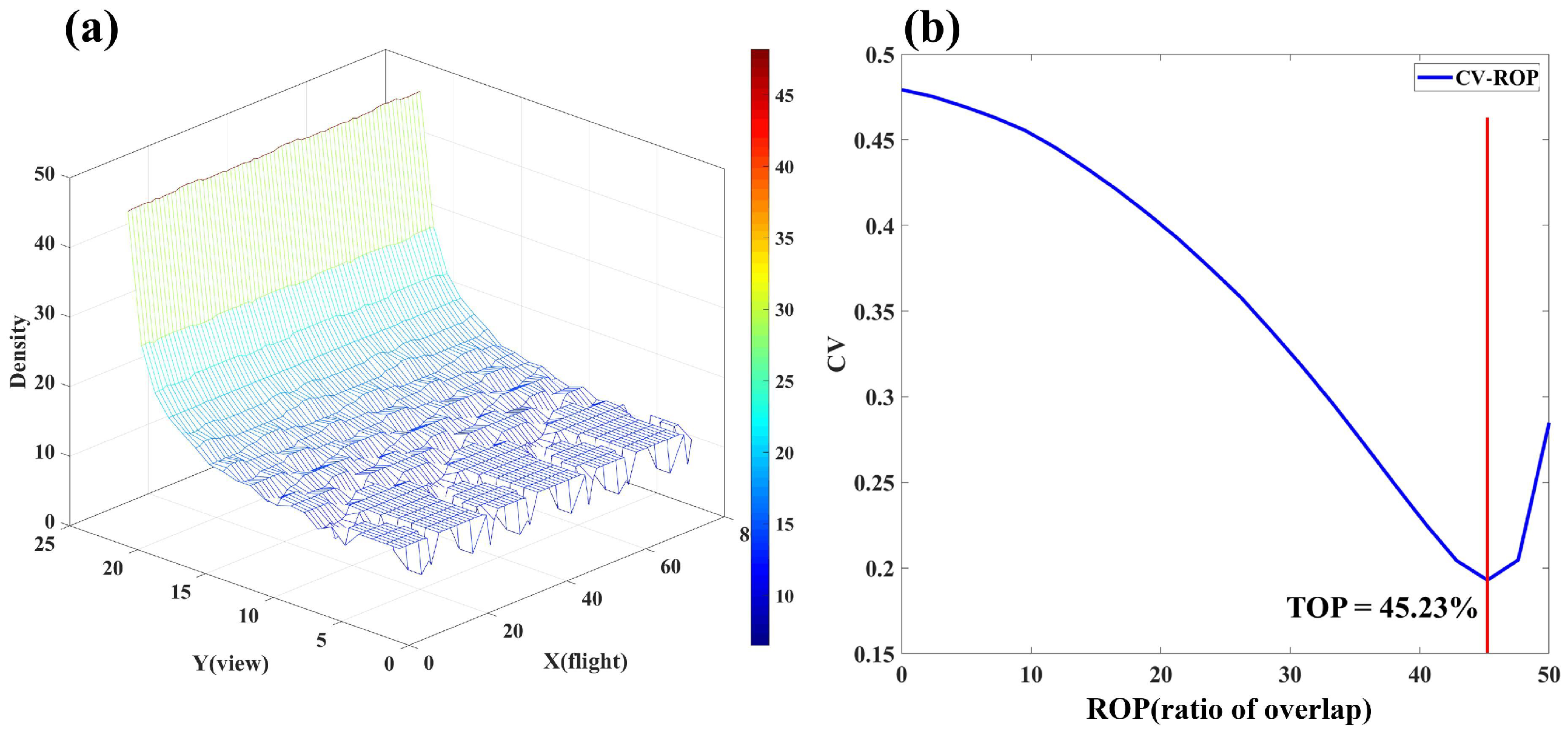
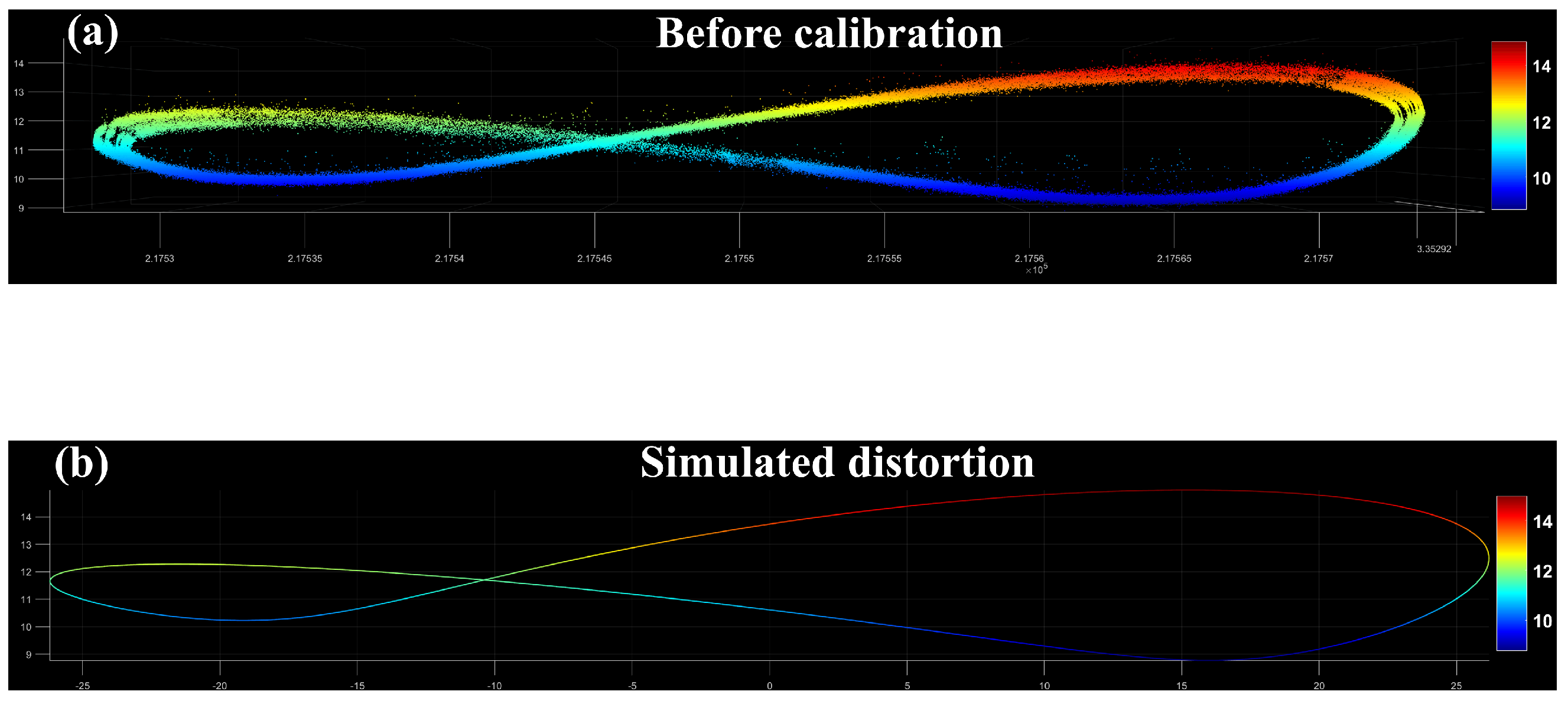
- Simulation of airborne laser scanning. Firstly, a static scanning trace based on the Palmer model is generated, with indoor laser vector measurements as the input parameters. Secondly, airborne trips are simulated with the input parameters set for an actual aerial survey. Based on the implementation of this step, the optimized rate of overlap (ROP) can be acquired to obtain the least diverse density distribution, providing optimized airborne scanning strip settings.
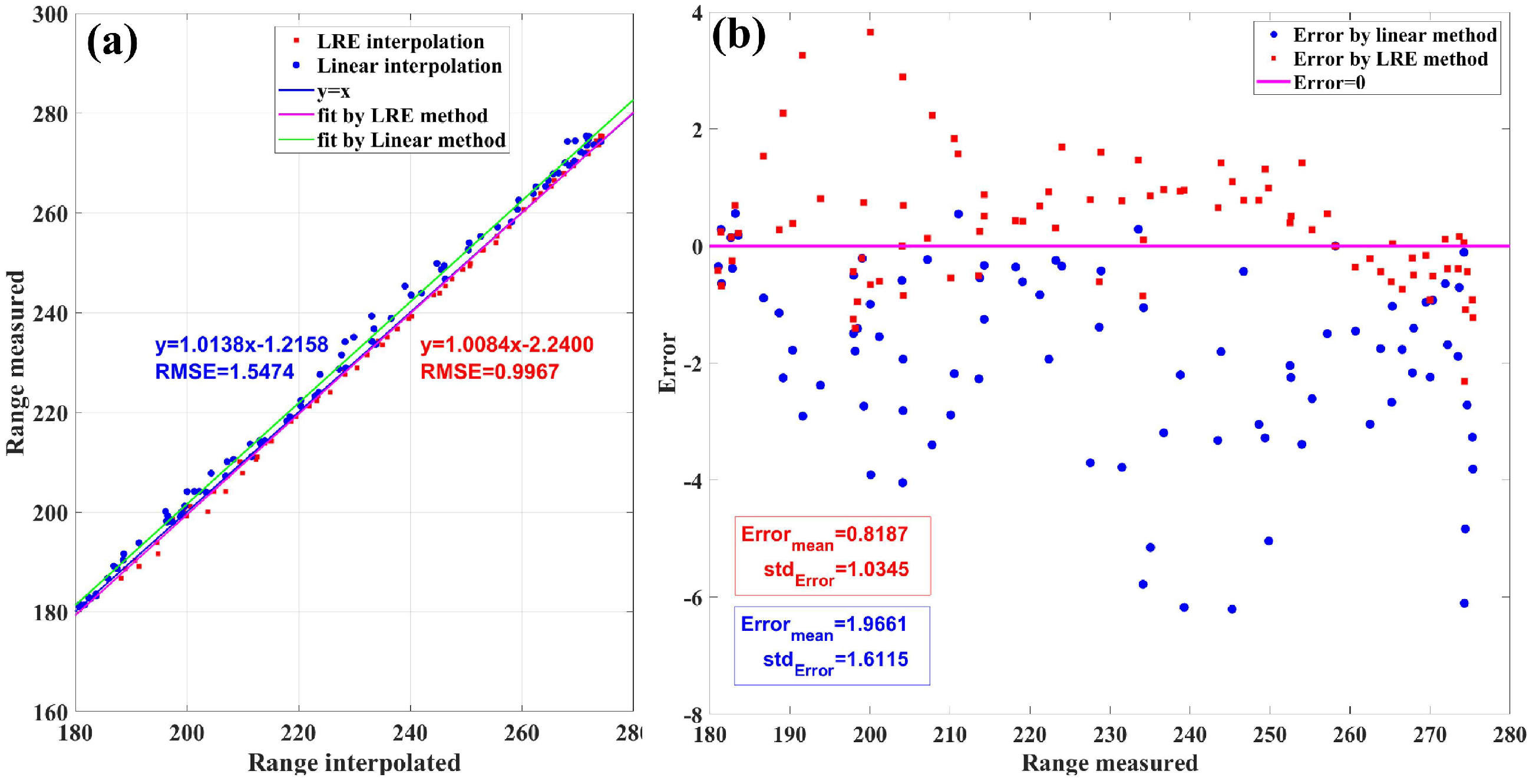
- Laser vector measurements. Firstly, laser vectors are acquired in several directions. Then, the laser vectors at all scanning angles can be interpolated through the integration of the simulated trace from exp. 1 and the LREI method. A total of 100 points are measured throughout the scanning traces: 30 percent are randomly chosen to interpolate a complete scanning trace, and the other 70 percent are used for validation.
- Calibration of the initial scanning angle and validation of the proposed calibration method. The effect of the angle offset can be corrected with the scan trace given using LREI in and LDFO. As airports are usually flat and are inevitably the starting points of aerial survey missions, they are chosen as the ground plane for collecting the point cloud data for calibration in this experiment. The ground truth of the airport and the aerial vehicle for the AHSL system is shown in Figure 8.
4. Result
4.1. Simulation and Analysis of Airborne Palmer Scanning
4.2. Calibration of the Scanning Geometry
4.2.1. Calibration of the Separating Laser Vector
4.2.2. Validation of the LRE Interpolation Method
4.2.3. Calibration of the Angle Offset
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Telling, J.W.; Lyda, A.; Hartzell, P.J.; Glennie, C.L. Review of Earth science research using terrestrial laser scanning. Earth-Sci. Rev. 2017, 169, 35–68. [Google Scholar] [CrossRef]
- Matikainen, L.; Karila, K.; Hyyppä, J.; Litkey, P.; Puttonen, E.; Ahokas, E. Object-based analysis of multispectral airborne laser scanner data for land cover classification and map updating. Isprs J. Photogramm. Remote Sens. 2017, 128, 298–313. [Google Scholar] [CrossRef]
- Glennie, C.L.; Carter, W.E.; Shrestha, R.L.; Dietrich, W.E.J. Geodetic imaging with airborne LiDAR: The Earth’s surface revealed. Rep. Prog. Phys. 2013, 76, 086801. [Google Scholar] [CrossRef]
- Lu, B.; Dao, P.D.; Liu, J.; He, Y.; Shang, J. Recent Advances of Hyperspectral Imaging Technology and Applications in Agriculture. Remote Sens. 2020, 12, 2659. [Google Scholar] [CrossRef]
- Kim, Y.; Kim, Y. Improved Classification Accuracy Based on the Output-Level Fusion of High-Resolution Satellite Images and Airborne LiDAR Data in Urban Area. IEEE Geosci. Remote Sens. Lett. 2014, 11, 636–640. [Google Scholar]
- Zhao, X.; Qi, J.; Xu, H.; Yu, Z.; Yuan, L.; Chen, Y.; Huang, H. Evaluating the potential of airborne hyperspectral LiDAR for assessing forest insects and diseases with 3D Radiative Transfer Modeling. Remote Sens. Environ. 2023, 297, 113759. [Google Scholar] [CrossRef]
- Dansona, M.; Gaultonb, R.; Armitagea, R.P.; Disneyc, M.; Lewisc, P.; Pearsone, G.; Ramireza, A.F. Developing a dual-wavelength full-waveform terrestrial laser scanner to characterize forest canopy structure. Agric. For. Meteorol. 2014, 198–199, 7–14. [Google Scholar] [CrossRef]
- Leigh, H.W.; Magruder, L.A. Using dual-wavelength, full-waveform airborne lidar for surface classification and vegetation characterization. J. Appl. Remote Sens. 2016, 10, 045001. [Google Scholar] [CrossRef]
- Diaz, J.C.F.; Carter, W.E.; Glennie, C.L.; Shrestha, R.L.; Pan, Z.; Ekhtari, N.; Singhania, A.; Hauser, D.L.; Sartori, M.P. Capability Assessment and Performance Metrics for the Titan Multispectral Mapping Lidar. Remote Sens. 2016, 8, 936. [Google Scholar] [CrossRef]
- Shi, S.; Bi, S.; Gong, W.; Chen, B.; Chen, B.; Tang, X.; Qu, F.; Song, S. Land Cover Classification with Multispectral LiDAR Based on Multi-Scale Spatial and Spectral Feature Selection. Remote Sens. 2021, 13, 4118. [Google Scholar] [CrossRef]
- Shi, S.; Tang, X.; Chen, B.; Chen, B.; Xu, Q.; Bi, S.; Gong, W. Point Cloud Data Processing Optimization in Spectral and Spatial Dimensions Based on Multispectral Lidar for Urban Single-Wood Extraction. ISPRS Int. J. Geo Inf. 2023, 12, 90. [Google Scholar] [CrossRef]
- Gong, W.; Sun, J.; Shi, S.; Yang, J.; Du, L.; Zhu, B.; Song, S. Investigating the Potential of Using the Spatial and Spectral Information of Multispectral LiDAR for Object Classification. Sensors 2015, 15, 21989–22002. [Google Scholar] [CrossRef]
- Gong, W.; Shi, S.; Chen, B.; Song, S.; Niu, Z.; Wang, C.; Guan, H.; Li, W.; Gao, S.; Lin, Y.; et al. Development and prospect of hyperspectral LiDAR for earth observation. Nat. Remote Sens. Bull. 2021, 25, 501–513. [Google Scholar] [CrossRef]
- Qian, L.; Wu, D.; Liu, D.; Song, S.; Shi, S.; Gong, W.; Wang, L. Parameter Simulation and Design of an Airborne Hyperspectral Imaging LiDAR System. Remote Sens. 2021, 13, 5123. [Google Scholar] [CrossRef]
- Qian, L.; Liu, D.; Zhu, X. Laser projection optical path design and speckle suppression. In Proceedings of the Fourteenth National Conference on Laser Technology and Optoelectronics, Shanghai, China, 17–20 March 2019. [Google Scholar]
- Qian, L.; Wu, D.; Liu, D.; Zhong, L.; Shi, S.; Song, S.; Gong, W. Design and demonstration of airborne hyperspectral imaging LiDAR system based on optical fiber array focal plane splitting. Opt. Commun. 2023, 534, 129331. [Google Scholar] [CrossRef]
- Wang, B.; Song, S.; Shi, S.; Chen, Z.; Li, F.; Wu, D.; Liu, D.; Gong, W. Multichannel Interconnection Decomposition for Hyperspectral LiDAR Waveforms Detected from over 500 m. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–14. [Google Scholar] [CrossRef]
- Qian, L.; Wu, D.; Zhou, X.; Zhong, L.; Wei, W.; Wang, Y.; Shi, S.; Song, S.; Gong, W.; Liu, D. Optical system design for a hyperspectral imaging lidar using supercontinuum laser and its preliminary performance. Optics Express 2021, 29 11, 17542–17553. [Google Scholar] [CrossRef]
- Wehr, A.; Lohr, U. Airborne laser scanning—An introduction and overview. Isprs J. Photogramm. Remote Sens. 1999, 54, 68–82. [Google Scholar] [CrossRef]
- Wei, Y. Analysis and implementation of limited angle swing scanning control system. Infrared Laser Eng. 2007, 36, 357. [Google Scholar]
- Rong, S. Method of achieving uniform scanning of airborne lidar. Infrared Laser Eng. 2008, 37, 675. [Google Scholar]
- Brosens, P.J. Scanning speed and accuracy of moving magnet optical scanners. In Recording Systems: High-Resolution Cameras and Recording Devices and Laser Scanning and Recording Systems; SPIE: Bellingham, WA, USA, 1993. [Google Scholar]
- Song, S.; Wang, B.; Gong, W.; Zhenwei, C.; Xin, L.; Sun, J.; Shi, S. A new waveform decomposition method for multispectral LiDAR. Isprs J. Photogramm. Remote Sens. 2019, 149, 40–49. [Google Scholar] [CrossRef]
- Shi, S.; Gong, C.; Xu, Q.; Wang, A.; Tang, X.; Bi, S.; Gong, W. Waveform Information Accurate Extraction for Massive and Complex Waveform Data of Hyperspectral Lidar. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2025, 18, 1020–1038. [Google Scholar] [CrossRef]
- Madsen, K.; Nielsen, H.B.; Tingleff, O. Methods for Non-Linear Least Squares Problems; Technical University of Denmark: Kongens Lyngby, Denmark, 1999. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scanning Method | Loss of Scanning Points (LSP) | Motor Load | Quality (Spatial Size) | Edge Effect |
|---|---|---|---|---|
| Oscillating mirror | 0% | High-frequency component | No | |
| Rotating mirror | 83.33% | Low-frequency component | Yes | |
| Palmer scan | 0% | Low-frequency component | No |
| Standard Deviation of Flatness | Worst Deviation of Flatness | |
|---|---|---|
| Before correction | 1.389 m | 6.4 m |
| After correction | 0.241 m | 1.953 m |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, S.; Xu, Q.; Gong, C.; Gong, W.; Tang, X.; Zhou, B. Analysis, Simulation, and Scanning Geometry Calibration of Palmer Scanning Units for Airborne Hyperspectral Light Detection and Ranging. Remote Sens. 2025, 17, 1450. https://doi.org/10.3390/rs17081450
Shi S, Xu Q, Gong C, Gong W, Tang X, Zhou B. Analysis, Simulation, and Scanning Geometry Calibration of Palmer Scanning Units for Airborne Hyperspectral Light Detection and Ranging. Remote Sensing. 2025; 17(8):1450. https://doi.org/10.3390/rs17081450
Chicago/Turabian StyleShi, Shuo, Qian Xu, Chengyu Gong, Wei Gong, Xingtao Tang, and Bowei Zhou. 2025. "Analysis, Simulation, and Scanning Geometry Calibration of Palmer Scanning Units for Airborne Hyperspectral Light Detection and Ranging" Remote Sensing 17, no. 8: 1450. https://doi.org/10.3390/rs17081450
APA StyleShi, S., Xu, Q., Gong, C., Gong, W., Tang, X., & Zhou, B. (2025). Analysis, Simulation, and Scanning Geometry Calibration of Palmer Scanning Units for Airborne Hyperspectral Light Detection and Ranging. Remote Sensing, 17(8), 1450. https://doi.org/10.3390/rs17081450