
Mapping Individual Tree- and Plot-Level Biomass Using Handheld Mobile Laser Scanning in Complex Subtropical Secondary and Old-Growth Forests

 , ,
, ,  , , ,
, , ,  ,
, 
Abstract
1. Introduction
2. Materials and Methods
2.1. Study Area
2.2. Survey Plots
2.3. Field Surveys
2.4. HMLS Point Clouds
2.4.1. Point Cloud Data Collection
2.4.2. Processing of Point Cloud Data
2.4.3. Tree Segmentation and Forest Attributes Extraction
2.5. Estimating Aboveground Biomass
3. Results
3.1. Detection and Segmentation of Individual Trees from HMLS Point Clouds
3.2. Extracting Individual Tree DBH and Height from HMLS Point Clouds
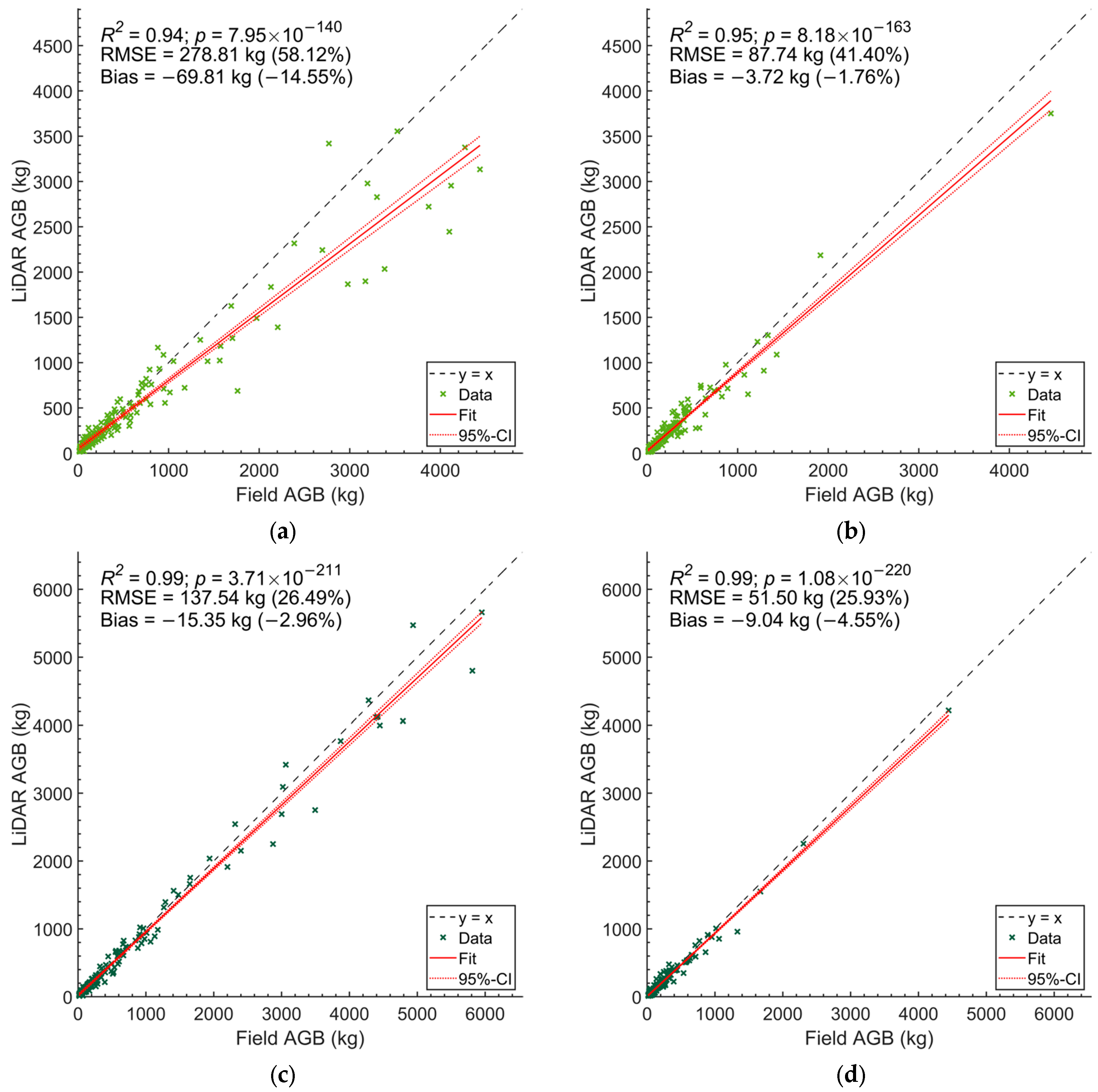
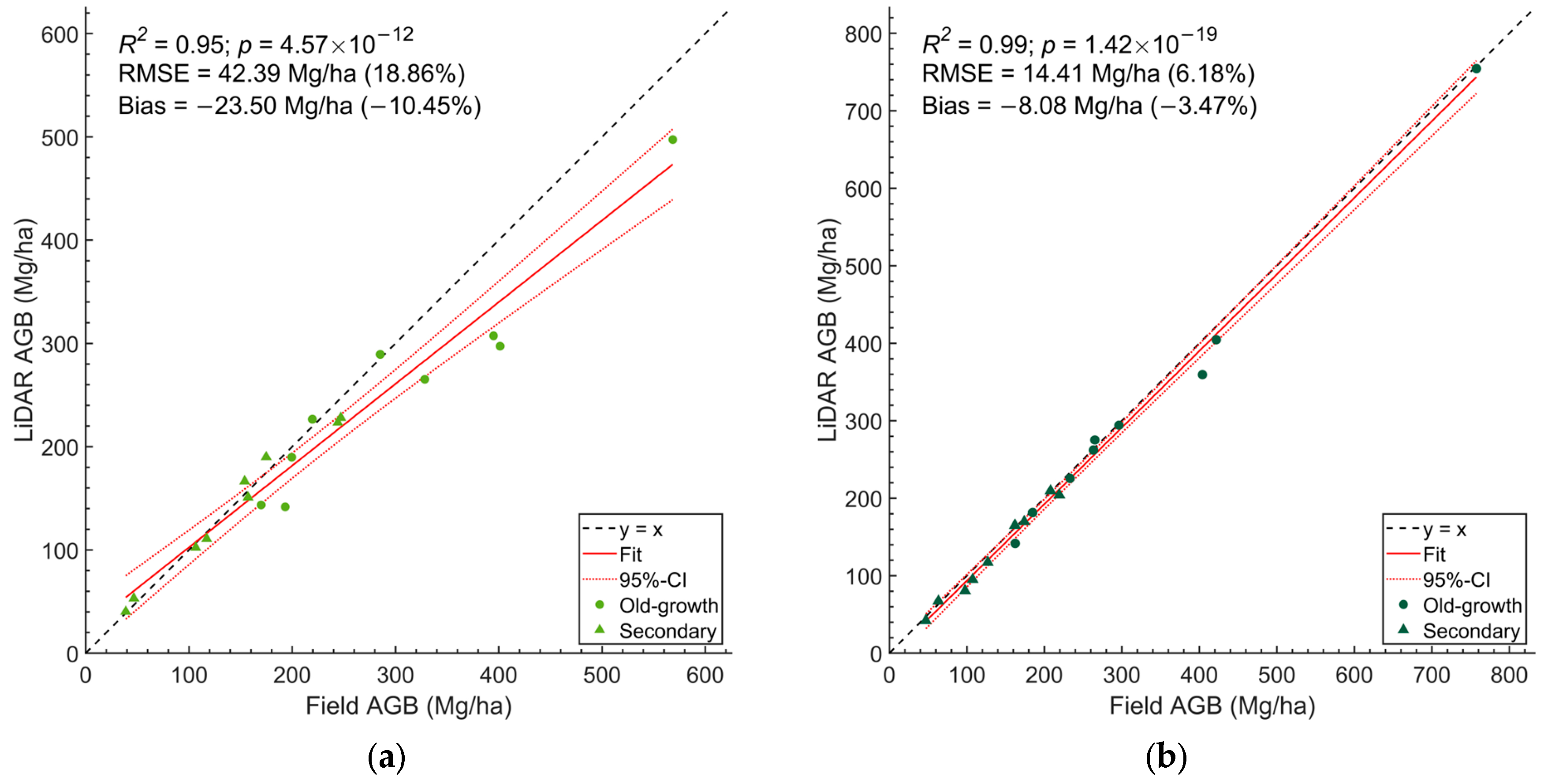
3.3. Estimating Individual Tree- and Plot-Level AGB in Old-Growth Forests and Secondary Forests
4. Discussion
4.1. Tree Detection Capability
4.2. Accuracy of Individual Tree Attribute Extraction
4.3. Ability to Estimate AGB in Two Different Forest Types
4.4. Limitations of This Study
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AGB | Aboveground biomass |
| ALS | Airborne laser scanning |
| DBH | Diameter at breast height |
| Eqn | Equation |
| Fig | Figure |
| FSWs | Fung Shui Woods |
| HMLS | Handheld Mobile Laser Scanning |
| IPCC | Intergovernmental Panel on Climate Change |
| LiDAR | Light Detection and Ranging |
| MLS | Mobile laser scanning |
| SLAM | Simultaneous localization and mapping |
| TLS | Terrestrial laser scanning |
| UAV | Unmanned aerial vehicle |
References
- Melo, F.P.L.; Parry, L.; Brancalion, P.H.S.; Pinto, S.R.R.; Freitas, J.; Manhães, A.P.; Meli, P.; Ganade, G.; Chazdon, R.L. Adding forests to the water–energy–food nexus. Nat. Sustain. 2021, 4, 85–92. [Google Scholar] [CrossRef]
- Law, B.E.; Berner, L.T.; Buotte, P.C.; Mildrexler, D.J.; Ripple, W.J. Strategic Forest Reserves can protect biodiversity in the western United States and mitigate climate change. Commun. Earth Environ. 2021, 2, 254. [Google Scholar] [CrossRef]
- Triviño, M.; Morán-Ordoñez, A.; Eyvindson, K.; Blattert, C.; Burgas, D.; Repo, A.; Pohjanmies, T.; Brotons, L.; Snäll, T.; Mönkkönen, M. Future supply of boreal forest ecosystem services is driven by management rather than by climate change. Glob. Change Biol. 2023, 29, 1484–1500. [Google Scholar] [CrossRef] [PubMed]
- Capellesso, E.S.; Cequinel, A.; Marques, R.; Sausen, T.L.; Bayer, C.; Marques, M.C.M. Co-benefits in biodiversity conservation and carbon stock during forest regeneration in a preserved tropical landscape. For. Ecol. Manag. 2021, 492, 119222. [Google Scholar] [CrossRef]
- Mukul, S.A.; Halim, M.A.; Herbohn, J. Forest carbon stock and fluxes: Distribution, biogeochemical cycles, and measurement techniques. In Life on Land; Encyclopedia of the UN Sustainable Development Goals; Springer: Cham, Switzerland, 2020; pp. 365–380. [Google Scholar]
- Zhao, J.; Liu, D.; Zhu, Y.; Peng, H.; Xie, H. A review of forest carbon cycle models on spatiotemporal scales. J. Clean. Prod. 2022, 339, 130692. [Google Scholar] [CrossRef]
- Raihan, A.; Begum, R.A.; Mohd Said, M.N.; Pereira, J.J. Assessment of carbon stock in forest biomass and emission reduction potential in Malaysia. Forests 2021, 12, 1294. [Google Scholar] [CrossRef]
- Siddiq, Z.; Hayyat, M.U.; Khan, A.U.; Mahmood, R.; Shahzad, L.; Ghaffar, R.; Cao, K.-F. Models to estimate the above and below ground carbon stocks from a subtropical scrub forest of Pakistan. Glob. Ecol. Conserv. 2021, 27, e01539. [Google Scholar] [CrossRef]
- Chave, J.; Réjou-Méchain, M.; Búrquez, A.; Chidumayo, E.; Colgan, M.S.; Delitti, W.B.C.; Duque, A.; Eid, T.; Fearnside, P.M.; Goodman, R.C.; et al. Improved allometric models to estimate the aboveground biomass of tropical trees. Glob. Change Biol. 2014, 20, 3177–3190. [Google Scholar] [CrossRef]
- Rozendaal, D.M.A.; Requena Suarez, D.; De Sy, V.; Avitabile, V.; Carter, S.; Adou Yao, C.Y.; Alvarez-Davila, E.; Anderson-Teixeira, K.; Araujo-Murakami, A.; Arroyo, L.; et al. Aboveground forest biomass varies across continents, ecological zones and successional stages: Refined IPCC default values for tropical and subtropical forests. Environ. Res. Lett. 2022, 17, 014047. [Google Scholar] [CrossRef]
- Zeng, N.; Jiang, K.; Han, P.; Hausfather, Z.; Cao, J.; Kirk-Davidoff, D.; Ali, S.; Zhou, S. The Chinese carbon-neutral goal: Challenges and prospects. Adv. Atmos. Sci. 2022, 39, 1229–1238. [Google Scholar] [CrossRef]
- Brown, S.; Gillespie, A.J.R.; Lugo, A.E. Biomass estimation methods for tropical forests with applications to forest inventory data. For. Sci. 1989, 35, 881–902. [Google Scholar] [CrossRef]
- Chave, J.; Andalo, C.; Brown, S.; Cairns, M.A.; Chambers, J.Q.; Eamus, D.; Fölster, H.; Fromard, F.; Higuchi, N.; Kira, T.; et al. Tree allometry and improved estimation of carbon stocks and balance in tropical forests. Oecologia 2005, 145, 87–99. [Google Scholar] [CrossRef] [PubMed]
- Vashum, K.T.; Jayakumar, S. Methods to estimate above-ground biomass and carbon stock in natural forests-a review. J. Ecosyst. Ecography 2012, 2, 116. [Google Scholar] [CrossRef]
- Zhuang, X.Y. Forest succession in Hong Kong. Ph.D. Thesis, University of Hong Kong, Hong Kong, China, 1993. [Google Scholar]
- Gonzalez-Akre, E.; Piponiot, C.; Lepore, M.; Herrmann, V.; Lutz, J.A.; Baltzer, J.L.; Dick, C.W.; Gilbert, G.S.; He, F.; Heym, M.; et al. allodb: An R package for biomass estimation at globally distributed extratropical forest plots. Methods Ecol. Evol. 2022, 13, 330–338. [Google Scholar] [CrossRef]
- Harja, D.; Rahayu, S.; Pambudi, S. Tree Functional Attributes and Ecological Database. World Agroforestry Centre (ICRAF), Nairobi. 2018. Available online: https://www.worldagroforestry.org/output/tree-functional-and-ecological-databases (accessed on 15 August 2022).
- Luo, Y.; Wang, X.; Ouyang, Z. A China’s Normalized Tree Biomass Equation Dataset [Dataset]. PANGAEA 2018. [Google Scholar] [CrossRef]
- Luo, Y.; Wang, X.; Ouyang, Z.; Lu, F.; Feng, L.; Tao, J. A review of biomass equations for China’s tree species. Earth Syst. Sci. Data 2020, 12, 21–40. [Google Scholar] [CrossRef]
- Nichol, J.E.; Sarker, M.L.R. Improved biomass estimation using the texture parameters of two high-resolution optical sensors. IEEE Trans. Geosci. Remote Sens. 2010, 49, 930–948. [Google Scholar] [CrossRef]
- Zhao, H.; Li, Z.; Zhou, G.; Qiu, Z.; Wu, Z. Site-specific allometric models for prediction of above-and belowground biomass of subtropical forests in Guangzhou, southern China. Forests 2019, 10, 862. [Google Scholar] [CrossRef]
- Lin, K.C.; Ma, F.C.; Tang, S.L. Allometric Equations for Predicting the Aboveground Biomass of Tree Species in the Fushan Forest. Taiwan J. For. Sci. 2001, 16, 143–151. [Google Scholar] [CrossRef]
- Gallaun, H.; Zanchi, G.; Nabuurs, G.-J.; Hengeveld, G.; Schardt, M.; Verkerk, P.J. EU-wide maps of growing stock and above-ground biomass in forests based on remote sensing and field measurements. For. Ecol. Manag. 2010, 260, 252–261. [Google Scholar] [CrossRef]
- Zellweger, F.; Morsdorf, F.; Purves, R.S.; Braunisch, V.; Bollmann, K. Improved methods for measuring forest landscape structure: LiDAR complements field-based habitat assessment. Biodivers. Conserv. 2014, 23, 289–307. [Google Scholar] [CrossRef]
- Wulder, M.A.; White, J.C.; Nelson, R.F.; Næsset, E.; Ørka, H.O.; Coops, N.C.; Hilker, T.; Bater, C.W.; Gobakken, T. Lidar sampling for large-area forest characterization: A review. Remote Sens. Environ. 2012, 121, 196–209. [Google Scholar] [CrossRef]
- Almeida, D.R.A.D.; Stark, S.C.; Chazdon, R.; Nelson, B.W.; César, R.G.; Meli, P.; Gorgens, E.B.; Duarte, M.M.; Valbuena, R.; Moreno, V.S.; et al. The effectiveness of lidar remote sensing for monitoring forest cover attributes and landscape restoration. For. Ecol. Manag. 2019, 438, 34–43. [Google Scholar] [CrossRef]
- Fuhr, M.; Lalechère, E.; Monnet, J.M.; Bergès, L. Detecting overmature forests with airborne laser scanning (ALS). Remote Sens. Ecol. Conserv. 2022, 8, 731–743. [Google Scholar] [CrossRef]
- Newnham, G.J.; Armston, J.D.; Calders, K.; Disney, M.I.; Lovell, J.L.; Schaaf, C.B.; Strahler, A.H.; Danson, F.M. Terrestrial laser scanning for plot-scale forest measurement. Curr. For. Rep. 2015, 1, 239–251. [Google Scholar] [CrossRef]
- Pascu, I.-S.; Dobre, A.-C.; Badea, O.; Tănase, M.A. Estimating forest stand structure attributes from terrestrial laser scans. Sci. Total Environ. 2019, 691, 205–215. [Google Scholar] [CrossRef]
- Hirschmugl, M.; Lippl, F.; Sobe, C. Assessing the vertical structure of forests using airborne and spaceborne LiDAR data in the Austrian Alps. Remote Sens. 2023, 15, 664. [Google Scholar] [CrossRef]
- Cosgrove, C.F.; Coops, N.C.; Martin, T.G. Using the full potential of Airborne Laser Scanning (aerial LiDAR) in wildlife research. Wildl. Soc. Bull. 2024, 48, e1532. [Google Scholar] [CrossRef]
- Ma, K.; Chen, Z.; Fu, L.; Tian, W.; Jiang, F.; Yi, J.; Du, Z.; Sun, H. Performance and sensitivity of individual tree segmentation methods for UAV-LiDAR in multiple forest types. Remote Sens. 2022, 14, 298. [Google Scholar] [CrossRef]
- Di Stefano, F.; Chiappini, S.; Gorreja, A.; Balestra, M.; Pierdicca, R. Mobile 3D scan LiDAR: A literature review. Geomat. Nat. Hazards Risk 2021, 12, 2387–2429. [Google Scholar] [CrossRef]
- Lei, L.; Li, Z.; Wu, J.; Zhang, C.; Zhu, Y.; Chen, R.; Dong, Z.; Yang, H.; Yang, G. Extraction of maize leaf base and inclination angles using terrestrial laser scanning (TLS) data. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–17. [Google Scholar] [CrossRef]
- Panagiotidis, D.; Abdollahnejad, A.; Slavík, M. 3D point cloud fusion from UAV and TLS to assess temperate managed forest structures. Int. J. Appl. Earth Obs. Geoinf. 2022, 112, 102917. [Google Scholar] [CrossRef]
- Czimber, K.; Szász, B.; Ács, N.; Heilig, D.; Illés, G.; Mészáros, D.; Veperdi, G.; Heil, B.; Kovács, G. Estimation of the Total Carbon Stock of Dudles Forest Based on Satellite Imagery, Airborne Laser Scanning, and Field Surveys. Forests 2025, 16, 512. [Google Scholar] [CrossRef]
- Thies, M.; Spiecker, H. Evaluation and future prospects of terrestrial laser scanning for standardized forest inventories. Forest 2004, 2, 192–197. [Google Scholar]
- Wilkes, P.; Lau, A.; Disney, M.; Calders, K.; Burt, A.; de Tanago, J.G.; Bartholomeus, H.; Brede, B.; Herold, M. Data acquisition considerations for terrestrial laser scanning of forest plots. Remote Sens. Environ. 2017, 196, 140–153. [Google Scholar] [CrossRef]
- Gollob, C.; Ritter, T.; Nothdurft, A. Forest inventory with long range and high-speed personal laser scanning (PLS) and simultaneous localization and mapping (SLAM) technology. Remote Sens. 2020, 12, 1509. [Google Scholar] [CrossRef]
- Liang, X.; Kankare, V.; Hyyppä, J.; Wang, Y.; Kukko, A.; Haggrén, H.; Yu, X.; Kaartinen, H.; Jaakkola, A.; Guan, F.; et al. Terrestrial laser scanning in forest inventories. ISPRS J. Photogramm. Remote Sens. 2016, 115, 63–77. [Google Scholar] [CrossRef]
- Kuželka, K.; Marušák, R.; Surový, P. Inventory of close-to-nature forest stands using terrestrial mobile laser scanning. Int. J. Appl. Earth Obs. Geoinf. 2022, 115, 103104. [Google Scholar] [CrossRef]
- Vandendaele, B.; Martin-Ducup, O.; Fournier, R.A.; Pelletier, G.; Lejeune, P. Mobile laser scanning for estimating tree structural attributes in a temperate hardwood Forest. Remote Sens. 2022, 14, 4522. [Google Scholar] [CrossRef]
- Ryding, J.; Williams, E.; Smith, M.J.; Eichhorn, M.P. Assessing handheld mobile laser scanners for forest surveys. Remote Sens. 2015, 7, 1095–1111. [Google Scholar] [CrossRef]
- Bauwens, S.; Bartholomeus, H.; Calders, K.; Lejeune, P. Forest inventory with terrestrial LiDAR: A comparison of static and hand-held mobile laser scanning. Forests 2016, 7, 127. [Google Scholar] [CrossRef]
- Vatandaşlar, C.; Zeybek, M. Extraction of forest inventory parameters using handheld mobile laser scanning: A case study from Trabzon, Turkey. Measurement 2021, 177, 109328. [Google Scholar] [CrossRef]
- Bienert, A.; Georgi, L.; Kunz, M.; von Oheimb, G.; Maas, H.-G. Automatic extraction and measurement of individual trees from mobile laser scanning point clouds of forests. Ann. Bot. 2021, 128, 787–804. [Google Scholar] [CrossRef] [PubMed]
- Fekry, R.; Yao, W.; Cao, L.; Shen, X. Ground-based/UAV-LiDAR data fusion for quantitative structure modeling and tree parameter retrieval in subtropical planted forest. For. Ecosyst. 2022, 9, 100065. [Google Scholar] [CrossRef]
- Calders, K.; Adams, J.; Armston, J.; Bartholomeus, H.; Bauwens, S.; Bentley, L.P.; Chave, J.; Danson, F.M.; Demol, M.; Disney, M.; et al. Terrestrial laser scanning in forest ecology: Expanding the horizon. Remote Sens. Environ. 2020, 251, 112102. [Google Scholar] [CrossRef]
- Mathes, T.; Seidel, D.; Häberle, K.-H.; Pretzsch, H.; Annighöfer, P. What are we missing? Occlusion in laser scanning point clouds and its impact on the detection of single-tree morphologies and stand structural variables. Remote Sens. 2023, 15, 450. [Google Scholar] [CrossRef]
- Cheung, P.K.; Jim, C.Y.; Siu, C.T. Effects of urban park design features on summer air temperature and humidity in compact-city milieu. Appl. Geogr. 2021, 129, 102439. [Google Scholar] [CrossRef]
- Law, Y.K.; Lee, C.K.F.; Pang, C.C.; Hau, B.C.H.; Wu, J. Vegetation regeneration on natural terrain landslides in Hong Kong: Direct seeding of native species as a restoration tool. Land Degrad. Dev. 2023, 34, 751–762. [Google Scholar] [CrossRef]
- Law, Y.K.; Lee, C.K.F.; Chan, A.H.Y.; Mak, N.P.L.; Hau, B.C.H.; Wu, J. Unveiling the role of forests in landslide occurrence, recurrence and recovery. J. Appl. Ecol. 2024, 61, 2033–2046. [Google Scholar] [CrossRef]
- Kwong, I.H.Y.; Wong, F.K.K.; Fung, T.; Liu, E.K.Y.; Lee, R.H.; Ng, T.P.T. A multi-stage approach combining very high-resolution satellite image, gis database and post-classification modification rules for habitat mapping in Hong Kong. Remote Sens. 2021, 14, 67. [Google Scholar] [CrossRef]
- Corlett, R.T. Environmental forestry in Hong Kong: 1871–1997. For. Ecol. Manag. 1999, 116, 93–105. [Google Scholar] [CrossRef]
- Zhang, H.; Lee, C.K.F.; Law, Y.K.; Chan, A.H.Y.; Zhang, J.; Gale, S.W.; Hughes, A.; Ledger, M.J.; Wong, M.S.; Tai, A.P.K.; et al. Integrating both restoration and regeneration potentials into real-world forest restoration planning: A case study of Hong Kong. J. Environ. Manag. 2024, 369, 122306. [Google Scholar] [CrossRef] [PubMed]
- Hong Kong Herbarium. An Overview of Fung Shui Woods in Hong Kong. Available online: https://www.herbarium.gov.hk/en/special-topics/fung-shui-woods/an-overview-of-fung-shui-woods-in-hong-kong/index.html (accessed on 10 February 2024).
- Yip, J.K.L.; Ngar, Y.N.; Yip, J.Y.; Liu, E.K.Y.; Lai, P.C.C. Venturing Fung Shui Woods; Friends of the Country Parks, Agriculture, Fisheries and Conservation Department & Cosmos Books Ltd.: Hong Kong, China, 2004. [Google Scholar]
- Chen, B.; Coggins, C.; Minor, J.; Zhang, Y. Fengshui forests and village landscapes in China: Geographic extent, socioecological significance, and conservation prospects. Urban For. Urban Green. 2018, 31, 79–92. [Google Scholar] [CrossRef]
- Zhuang, X.Y.; Gorlett, R.T. Forest and forest succession in Hong Kong, China. J. Trop. Ecol. 1997, 13, 857–866. [Google Scholar] [CrossRef]
- Hu, L.; Li, Z.; Liao, W.-B.; Fan, Q. Values of village fengshui forest patches in biodiversity conservation in the Pearl River Delta, China. Biol. Conserv. 2011, 144, 1553–1559. [Google Scholar] [CrossRef]
- Zhu, H.; Zhang, J.; Hau, B.C.H.; Shum, B.T.W.; Ma, X.K.K.; Lo, J.P.L.; Fischer, G.A.; Gale, S.W. Tai Po Kau ForestGEO Forest Dynamics Plot: Species Composition and Community Structure; Kadoorie Farm and Botanic Garden: Hong Kong, China, 2024. [Google Scholar]
- Nicholson, B. Tai Po Kau nature reserve, new territories, Hong Kong: A reafforestation history. Asian J. Environ. Manag. 1996, 4, 103–120. [Google Scholar]
- Condit, R. Tropical Forest Census Plots: Methods and Results from Barro Colorado Island, Panama and a Comparison with Other Plots; Springer: Berlin/Heidelberg, Germany, 1998. [Google Scholar]
- GreenValley International. LiGrip H120 Rotating Handheld SLAM LiDAR System Quick Start Manual. Available online: https://www.greenvalleyintl.com/gvi/web/us/file/EN-LiGripH120-UserManual-(Ver-A.10).pdf (accessed on 22 December 2024).
- Su, Y.; Guo, Q.; Jin, S.; Guan, H.; Sun, X.; Ma, Q.; Hu, T.; Wang, R.; Li, Y. The development and evaluation of a backpack LiDAR system for accurate and efficient forest inventory. IEEE Geosci. Remote Sens. Lett. 2020, 18, 1660–1664. [Google Scholar] [CrossRef]
- Li, L.; Wei, L.; Li, N.; Zhang, S.; Hu, M.; Ma, J. Impact of Backpack LiDAR Scan Routes on Diameter at Breast Height Estimation in Forests. Forests 2025, 16, 527. [Google Scholar] [CrossRef]
- GreenValley International. LiFuser-BP Data Fusion Software User Guide. Available online: https://www.greenvalleyintl.com/static/upload/file/20231215/1702625843211308.pdf (accessed on 30 December 2024).
- Zhao, X.; Guo, Q.; Su, Y.; Xue, B. Improved progressive TIN densification filtering algorithm for airborne LiDAR data in forested areas. ISPRS J. Photogramm. Remote Sens. 2016, 117, 79–91. [Google Scholar] [CrossRef]
- Tao, S.; Wu, F.; Guo, Q.; Wang, Y.; Li, W.; Xue, B.; Hu, X.; Li, P.; Tian, D.; Li, C.; et al. Segmenting tree crowns from terrestrial and mobile LiDAR data by exploring ecological theories. ISPRS J. Photogramm. Remote Sens. 2015, 110, 66–76. [Google Scholar] [CrossRef]
- MATLAB, version: 9.13.0 (R2022b); The MathWorks Inc.: Natick, MA, USA, 2022.
- Chao, K.; Li, Y.; Song, G.M.; Chao, W.; Chang-Yang, C.; Chiang, J. Database for Carbon Stocks Estimation Variables of Tree Species Used in Soil and Water Conservation. J. Chin. Soil Water Conserv. 2024, 53, 100–110. [Google Scholar] [CrossRef]
- Chave, J.; Coomes, D.; Jansen, S.; Lewis, S.L.; Swenson, N.G.; Zanne, A.E. Towards a worldwide wood economics spectrum. Ecol. Lett. 2009, 12, 351–366. [Google Scholar] [CrossRef] [PubMed]
- Zanne, A.E.; Lopez-Gonzalez, G.; Coomes, D.A.; Ilic, J.; Jansen, S.; Lewis, S.L.; Miller, R.B.; Swenson, N.G.; Wiemann, M.C.; Chave, J. Data from: Towards a worldwide wood economics spectrum [dataset]. Dryad 2009. [Google Scholar] [CrossRef]
- Tupinambá-Simões, F.; Pascual, A.; Guerra-Hernández, J.; Ordóñez, C.; de Conto, T.; Bravo, F. Assessing the performance of a handheld laser scanning system for individual tree mapping—A Mixed forests showcase in Spain. Remote Sens. 2023, 15, 1169. [Google Scholar] [CrossRef]
- Wang, Y.; Lehtomäki, M.; Liang, X.; Pyörälä, J.; Kukko, A.; Jaakkola, A.; Liu, J.; Feng, Z.; Chen, R.; Hyyppä, J. Is field-measured tree height as reliable as believed–A comparison study of tree height estimates from field measurement, airborne laser scanning and terrestrial laser scanning in a boreal forest. ISPRS J. Photogramm. Remote Sens. 2019, 147, 132–145. [Google Scholar] [CrossRef]
- Jim, C.Y. Soil compaction as a constraint to tree growth in tropical & subtropical urban habitats. Environ. Conserv. 1993, 20, 35–49. [Google Scholar]
- Kükenbrink, D.; Marty, M.; Rehush, N.; Abegg, M.; Ginzler, C. Evaluating the potential of handheld mobile laser scanning for an operational inclusion in a national forest inventory—A Swiss case study. Remote Sens. Environ. 2025, 321, 114685. [Google Scholar] [CrossRef]
- Henrich, J.; van Delden, J.; Seidel, D.; Kneib, T.; Ecker, A.S. TreeLearn: A deep learning method for segmenting individual trees from ground-based LiDAR forest point clouds. Ecol. Inform. 2024, 84, 102888. [Google Scholar] [CrossRef]
- Itakura, K.; Miyatani, S.; Hosoi, F. Estimating tree structural parameters via automatic tree segmentation from LiDAR point cloud data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 15, 555–564. [Google Scholar] [CrossRef]
- Chang, L.; Fan, H.; Zhu, N.; Dong, Z. A two-stage approach for individual tree segmentation from TLS point clouds. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2022, 15, 8682–8693. [Google Scholar] [CrossRef]
- Xu, J.; Zhang, Z.; Hu, X.; Ke, T. Accelerated forest modeling from tree canopy point clouds via deep learning. Int. J. Appl. Earth Obs. Geoinf. 2024, 132, 104074. [Google Scholar] [CrossRef]
- Sofia, S.; Sferlazza, S.; Mariottini, A.; Niccolini, M.; Coppi, T.; Miozzo, M.; La Mantia, T.; Maetzke, F. A case study of the application of hand-held mobile laser scanning in the planning of an italian forest (Alpe di Catenaia, Tuscany). Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2021, XLIII-B2-2021, 763–770. [Google Scholar] [CrossRef]
- de Nobel, J.S.; Rijsdijk, K.F.; Cornelissen, P.; Seijmonsbergen, A.C. Towards Prediction and Mapping of Grassland Aboveground Biomass Using Handheld LiDAR. Remote Sens. 2023, 15, 1754. [Google Scholar] [CrossRef]
- Li, M.; Li, Z.; Zhang, M.; Liu, Q.; Li, M. Efficient shrub modelling based on terrestrial laser scanning (TLS) point clouds. Int. J. Remote Sens. 2024, 45, 1148–1169. [Google Scholar] [CrossRef]
- Wang, B.; Wang, H.; Song, D. A filtering method for LiDAR point cloud based on multi-scale CNN with attention mechanism. Remote Sens. 2022, 14, 6170. [Google Scholar] [CrossRef]
- Cai, S.; Yu, S. Filtering airborne LiDAR data in forested environments based on multi-directional narrow window and cloth simulation. Remote Sens. 2023, 15, 1400. [Google Scholar] [CrossRef]
- Hyyppä, E.; Yu, X.; Kaartinen, H.; Hakala, T.; Kukko, A.; Vastaranta, M.; Hyyppä, J. Comparison of backpack, handheld, under-canopy UAV, and above-canopy UAV laser scanning for field reference data collection in boreal forests. Remote Sens. 2020, 12, 3327. [Google Scholar] [CrossRef]
- Stal, C.; Verbeurgt, J.; De Sloover, L.; De Wulf, A. Assessment of handheld mobile terrestrial laser scanning for estimating tree parameters. J. For. Res. 2021, 32, 1503–1513. [Google Scholar] [CrossRef]
- Čerňava, J.; Tuček, J.; Koreň, M.; Mokroš, M. Estimation of diameter at breast height from mobile laser scanning data collected under a heavy forest canopy. J. For. Sci. 2017, 63, 433–441. [Google Scholar] [CrossRef]
- Ngomanda, A.; Mavouroulou, Q.M.; Obiang, N.L.E.; Iponga, D.M.; Mavoungou, J.-F.; Lépengué, N.; Picard, N.; Mbatchi, B. Derivation of diameter measurements for buttressed trees, an example from Gabon. J. Trop. Ecol. 2012, 28, 299–302. [Google Scholar] [CrossRef]
- Nogueira, E.M.; Nelson, B.W.; Fearnside, P.M. Volume and biomass of trees in central Amazonia: Influence of irregularly shaped and hollow trunks. For. Ecol. Manag. 2006, 227, 14–21. [Google Scholar] [CrossRef]
- Lin, Y.; Hyyppä, J.; Jaakkola, A.; Yu, X. Three-level frame and RD-schematic algorithm for automatic detection of individual trees from MLS point clouds. Int. J. Remote Sens. 2012, 33, 1701–1716. [Google Scholar] [CrossRef]
- Jurjević, L.; Liang, X.; Gašparović, M.; Balenović, I. Is field-measured tree height as reliable as believed–Part II, A comparison study of tree height estimates from conventional field measurement and low-cost close-range remote sensing in a deciduous forest. ISPRS J. Photogramm. Remote Sens. 2020, 169, 227–241. [Google Scholar] [CrossRef]
- Luoma, V.; Saarinen, N.; Wulder, M.A.; White, J.C.; Vastaranta, M.; Holopainen, M.; Hyyppä, J. Assessing precision in conventional field measurements of individual tree attributes. Forests 2017, 8, 38. [Google Scholar] [CrossRef]
- Fan, Y.; Feng, Z.; Mannan, A.; Khan, T.U.; Shen, C.; Saeed, S. Estimating tree position, diameter at breast height, and tree height in real-time using a mobile phone with RGB-D SLAM. Remote Sens. 2018, 10, 1845. [Google Scholar] [CrossRef]
- Chen, J.; Zhao, D.; Zheng, Z.; Xu, C.; Pang, Y.; Zeng, Y. A clustering-based automatic registration of UAV and terrestrial LiDAR forest point clouds. Comput. Electron. Agric. 2024, 217, 108648. [Google Scholar] [CrossRef]
- Deng, Y.; Wang, J.; Dong, P.; Liu, Q.; Ma, W.; Zhang, J.; Su, G.; Li, J. Registration of TLS and ULS Point Cloud Data in Natural Forest Based on Similar Distance Search. Forests 2024, 15, 1569. [Google Scholar] [CrossRef]
- Gan, Y.; Wang, Q.; Song, G. Non-Destructive Estimation of Deciduous Forest Metrics: Comparisons between UAV-LiDAR, UAV-DAP, and Terrestrial LiDAR Leaf-Off Point Clouds Using Two QSMs. Remote Sens. 2024, 16, 697. [Google Scholar] [CrossRef]
- Luyssaert, S.; Schulze, E.D.; Börner, A.; Knohl, A.; Hessenmöller, D.; Law, B.E.; Ciais, P.; Grace, J. Old-growth forests as global carbon sinks. Nature 2008, 455, 213–215. [Google Scholar] [CrossRef]
- Harmon, M.E.; Ferrell, W.K.; Franklin, J.F. Effects on carbon storage of conversion of old-growth forests to young forests. Science 1990, 247, 699–702. [Google Scholar] [CrossRef]
- Lee, K.W.K.; Cheuk, M.L.; Fischer, G.A.; Gale, S.W. Can Disparate Shared Social Values Benefit the Conservation of Biodiversity in Hong Kong’s Sacred Groves? Hum. Ecol. 2023, 51, 1021–1032. [Google Scholar] [CrossRef]
- Lutz, J.A.; Furniss, T.J.; Johnson, D.J.; Davies, S.J.; Allen, D.; Alonso, A.; Anderson-Teixeira, K.J.; Andrade, A.; Baltzer, J.; Becker, K.M.L.; et al. Global importance of large-diameter trees. Glob. Ecol. Biogeogr. 2018, 27, 849–864. [Google Scholar] [CrossRef]
- Development Bureau of the Government of the Hong Kong Special Administrative Region. Technical Circular (Works) No. 4/2020: Tree Preservation; Hong Kong SAR Government: Hong Kong, China, 2020.
- Planning Department of the Government of the Hong Kong Special Administrative Region. Hong Kong Planning Standards and Guidelines; Hong Kong SAR Government: Hong Kong, China, 2020.
- Lau, A.; Bentley, L.P.; Martius, C.; Shenkin, A.; Bartholomeus, H.; Raumonen, P.; Malhi, Y.; Jackson, T.; Herold, M. Quantifying branch architecture of tropical trees using terrestrial LiDAR and 3D modelling. Trees 2018, 32, 1219–1231. [Google Scholar] [CrossRef]
- Martin-Ducup, O.; Mofack, G.; Wang, D.; Raumonen, P.; Ploton, P.; Sonké, B.; Barbier, N.; Couteron, P.; Pélissier, R. Evaluation of automated pipelines for tree and plot metric estimation from TLS data in tropical forest areas. Ann. Bot. 2021, 128, 753–766. [Google Scholar] [CrossRef]
- Sarker, M.L.R. Estimation of forest biomass using remote sensing. Ph.D. Thesis, Hong Kong Polytechnic University, Hong Kong, China, 2010. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value and Setting |
|---|---|
| Cluster Tolerance | 0.2 m |
| Minimum Cluster Size | 500 |
| Minimum DBH | 0.08 m |
| Maximum DBH | 0.8–1.2 m, varying with specific plots of interest |
| Height Above Ground | 1 m |
| Minimum Tree Height | 5 m |
| Old-Growth Forests | Secondary Forests | |||||||
|---|---|---|---|---|---|---|---|---|
| Shrub and Trees (DBH ≥ 1 cm) | Trees (DBH ≥ 9.5 cm) | Shrub and Trees (DBH ≥ 1 cm) | Trees (DBH ≥ 9.5 cm) | |||||
| DBH (cm) | Height (m) | DBH (cm) | Height (m) | DBH (cm) | Height (m) | DBH (cm) | Height (m) | |
| Mean | 5.7 | 4.6 | 26.7 | 11.9 | 5.6 | 4.7 | 19.4 | 11.0 |
| SD | 10.5 | 3.5 | 19.0 | 4.4 | 7.6 | 3.6 | 10.0 | 3.9 |
| Minimum | 1.0 | 1.3 | 9.7 | 2.6 | 1.0 | 1.4 | 9.5 | 3.9 |
| Maximum | 101.6 | 25.9 | 101.6 | 25.9 | 62.2 | 23.5 | 62.2 | 23.5 |
| Stem Density/ha | ||||
|---|---|---|---|---|
| Old-Growth Forests | Secondary Forests | |||
| Shrub and Trees | Trees | Shrub and Trees | Trees | |
| Mean | 5925 | 736 | 4575 | 769 |
| SD | 1833 | 225 | 1181 | 284 |
| Minimum | 4175 | 425 | 2525 | 400 |
| Maximum | 9550 | 1075 | 6125 | 1200 |
| Aboveground Biomass (Mg/ha) | ||||
|---|---|---|---|---|
| Old-Growth Forests | Secondary Forests | |||
| Equation (5) | Equation (6) | Equation (5) | Equation (6) | |
| Field data (trees and shrubs) | 316.5 ± 131.7 | 340.2 ± 182.2 | 151.1 ± 76.4 | 140.6 ± 62.7 |
| Field data (trees) | 306.7 ± 130.8 | 332 ± 182 | 142.9 ± 74.6 | 134 ± 61 |
| HMLS data (trees) | 262 ± 108.6 | 322 ± 181.4 | 140.6 ± 68.7 | 127.8 ± 61.3 |
| Average of field and HMLS (trees) | 305.7 ± 30.9 | 136.3 ± 6.8 | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mak, N.P.L.; Siu, T.Y.; Law, Y.K.; Zhang, H.; Sui, S.; Yip, F.T.; Ng, Y.S.; Ye, Y.; Cheung, T.C.; Wa, K.C.; et al. Mapping Individual Tree- and Plot-Level Biomass Using Handheld Mobile Laser Scanning in Complex Subtropical Secondary and Old-Growth Forests. Remote Sens. 2025, 17, 1354. https://doi.org/10.3390/rs17081354
Mak NPL, Siu TY, Law YK, Zhang H, Sui S, Yip FT, Ng YS, Ye Y, Cheung TC, Wa KC, et al. Mapping Individual Tree- and Plot-Level Biomass Using Handheld Mobile Laser Scanning in Complex Subtropical Secondary and Old-Growth Forests. Remote Sensing. 2025; 17(8):1354. https://doi.org/10.3390/rs17081354
Chicago/Turabian StyleMak, Nelson Pak Lun, Tin Yan Siu, Ying Ki Law, He Zhang, Shaoti Sui, Fung Ting Yip, Ying Sim Ng, Yuhao Ye, Tsz Chun Cheung, Ka Cheong Wa, and et al. 2025. "Mapping Individual Tree- and Plot-Level Biomass Using Handheld Mobile Laser Scanning in Complex Subtropical Secondary and Old-Growth Forests" Remote Sensing 17, no. 8: 1354. https://doi.org/10.3390/rs17081354
APA StyleMak, N. P. L., Siu, T. Y., Law, Y. K., Zhang, H., Sui, S., Yip, F. T., Ng, Y. S., Ye, Y., Cheung, T. C., Wa, K. C., Chan, L. H., So, K. Y., Hau, B. C. H., Lee, C. K. F., & Wu, J. (2025). Mapping Individual Tree- and Plot-Level Biomass Using Handheld Mobile Laser Scanning in Complex Subtropical Secondary and Old-Growth Forests. Remote Sensing, 17(8), 1354. https://doi.org/10.3390/rs17081354