
Interpretable Dual-Channel Convolutional Neural Networks for Lithology Identification Based on Multisource Remote Sensing Data


Abstract

1. Introduction
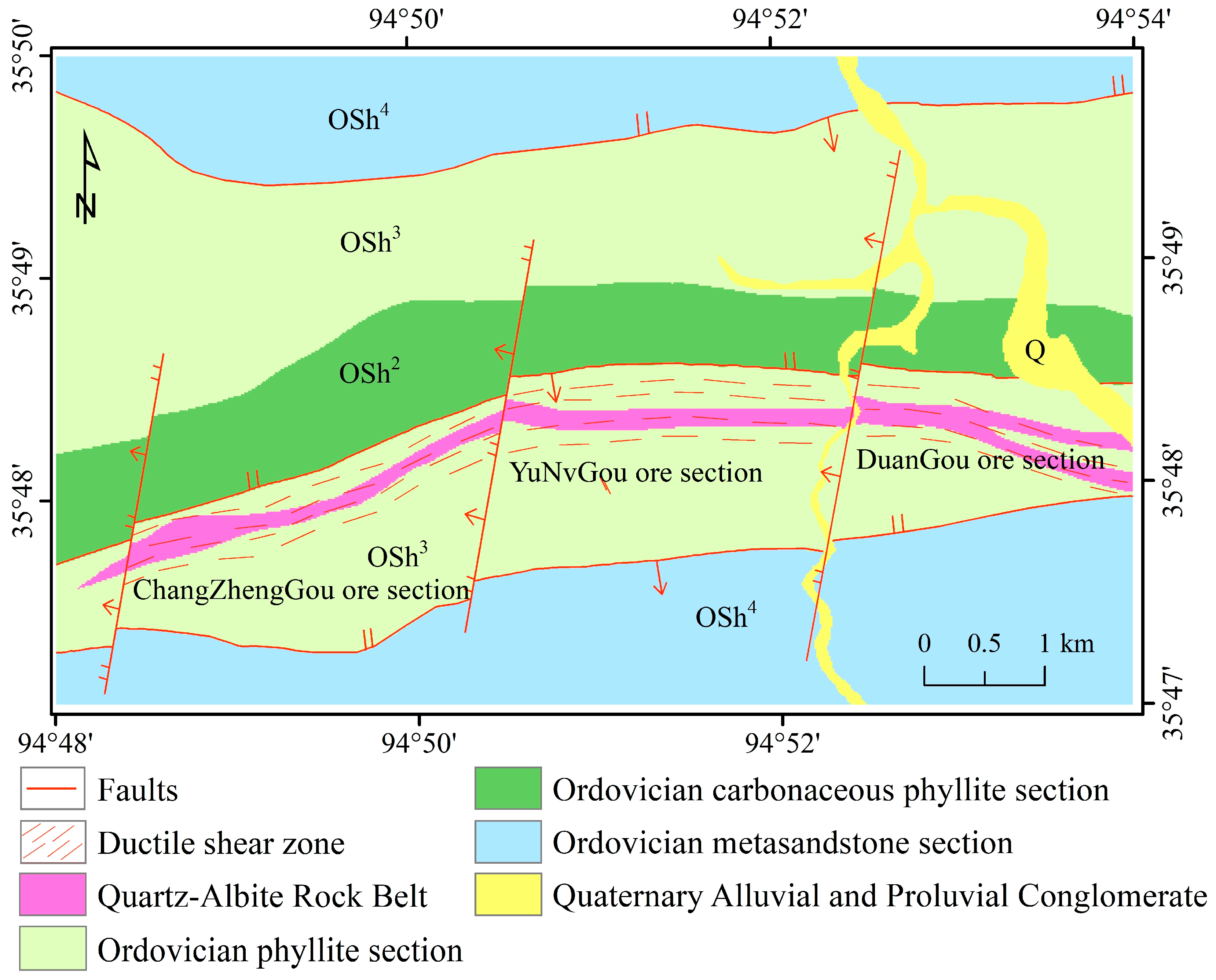
2. Geological Background
3. Data and Methodology
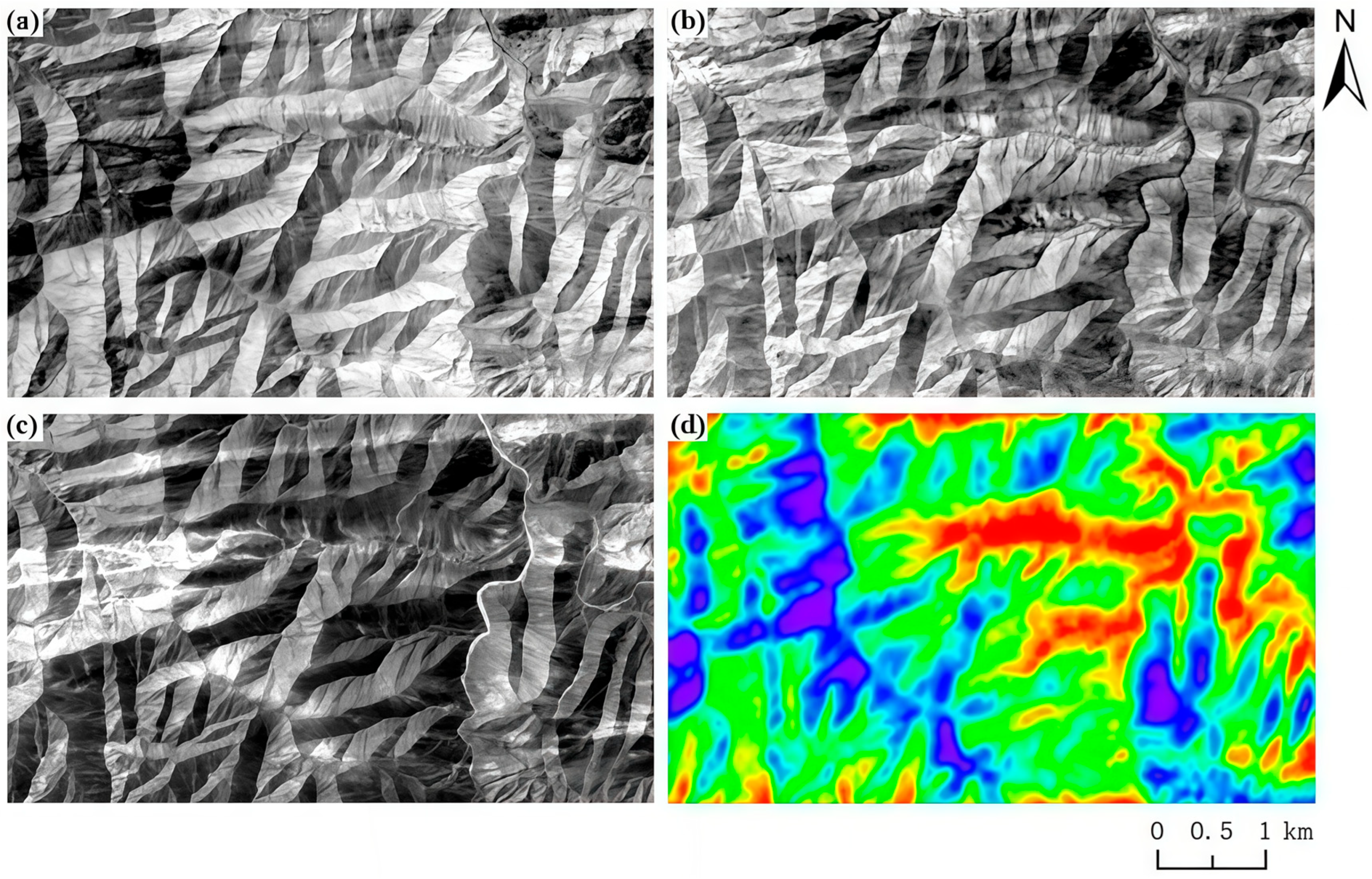
3.1. Remote Sensing Data
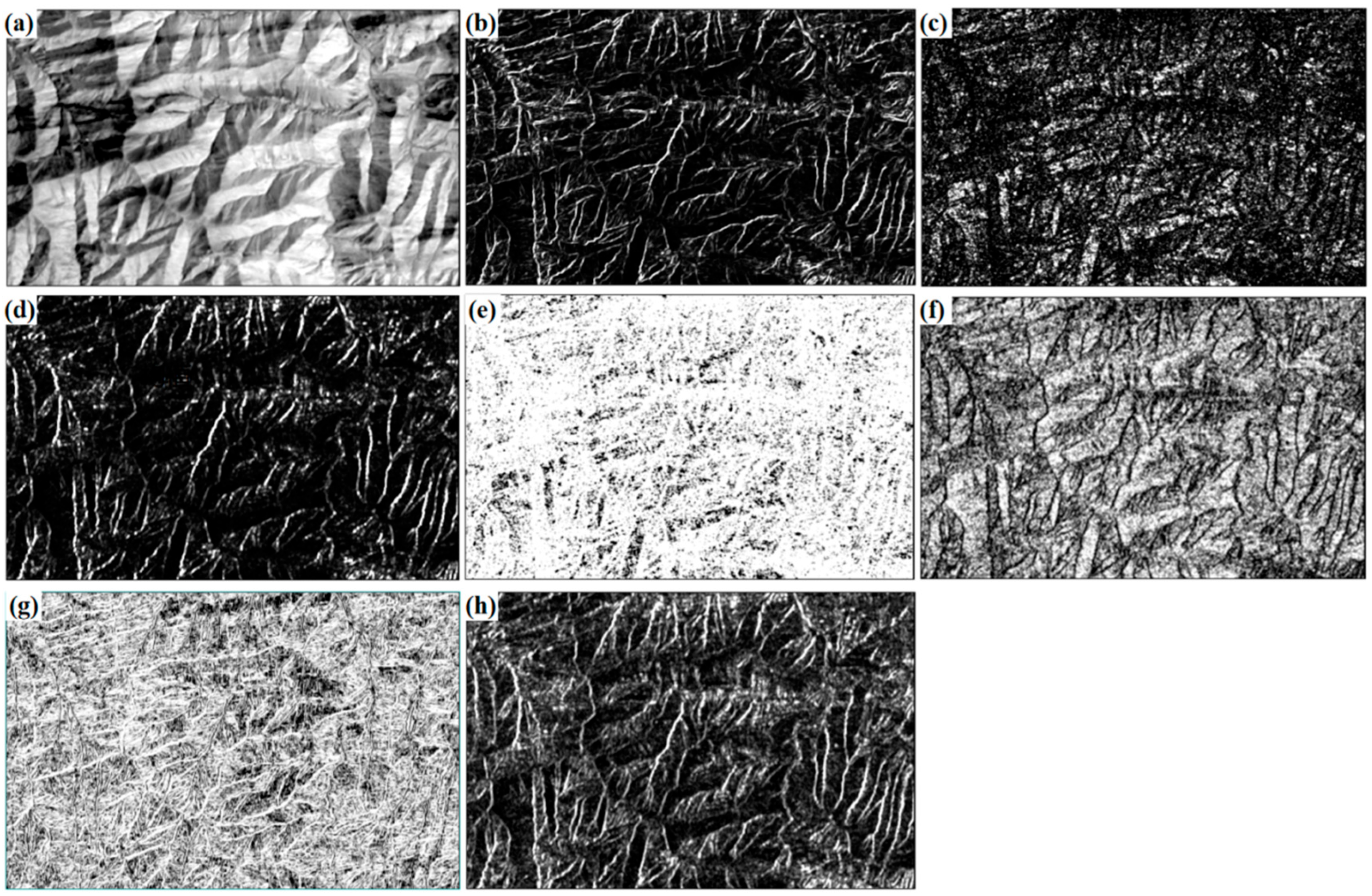
3.2. Preprocessing of the Remote Sensing Data
3.2.1. GF5B Hyperspectral Data
3.2.2. Landsat-8 Multispectral Data Preprocessing
3.3. Principles of Convolutional Neural Networks
3.3.1. Convolutional Neural Network
3.3.2. The Dual-Channel Convolutional Neural Network
3.4. Random Forest
- (1)
- Bootstrap aggregation (bagging): Random sampling with replacement from the original training data to create K subsets.
- (2)
- Feature subspace selection: For each subset, randomly choosing N features for model construction.
- (1)
- Randomly select a portion of features for decision tree construction to ensure the diversity of the evaluation model.
- (2)
- For each subset of features, apply the recursive partitioning method to construct the corresponding decision tree to eliminate the uncertainty of the samples in each leaf node. Repeat the above steps to form a random forest.
- (3)
- In classification problems, the majority voting method is used to derive the final prediction results, while in regression problems, the average value method is utilized to obtain the final prediction results.
- (4)
- Evaluate the model using relevant evaluation metrics and adjust the parameters to optimize the performance of the model.
3.5. Evaluation Metrics
- (1)
- Overall Accuracy (OA)
- (2)
- Average Accuracy (AA)
- (3)
- Kappa coefficient
3.6. Shapley Additive Explanation
4. Model Construction Based on Remote Sensing Data
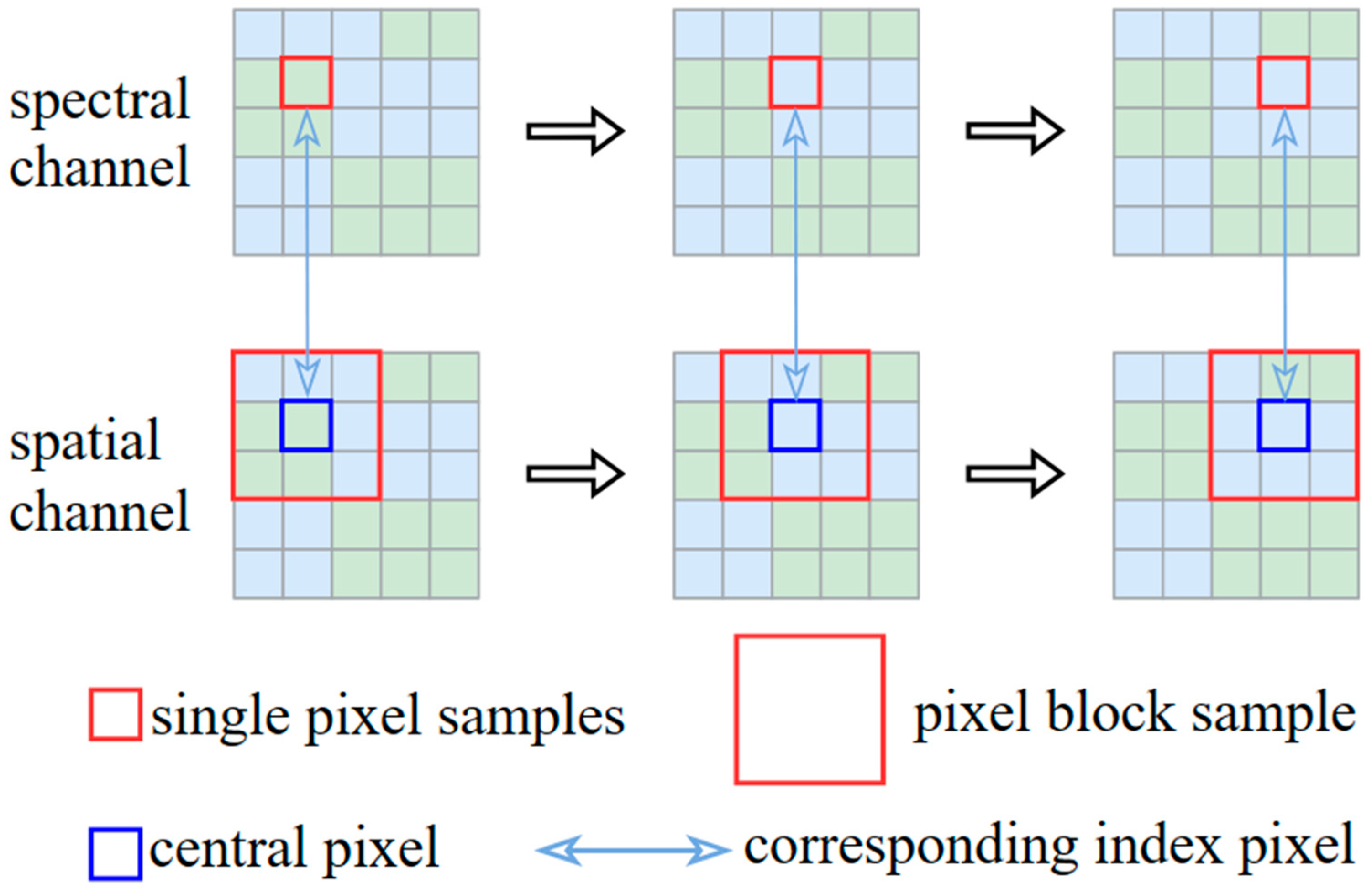
4.1. Sample Production
4.2. Construction of the Dual-Channel CNN Model
4.2.1. The Spectral Feature Channel
4.2.2. The Spatial Feature Channel
4.2.3. Feature Integration
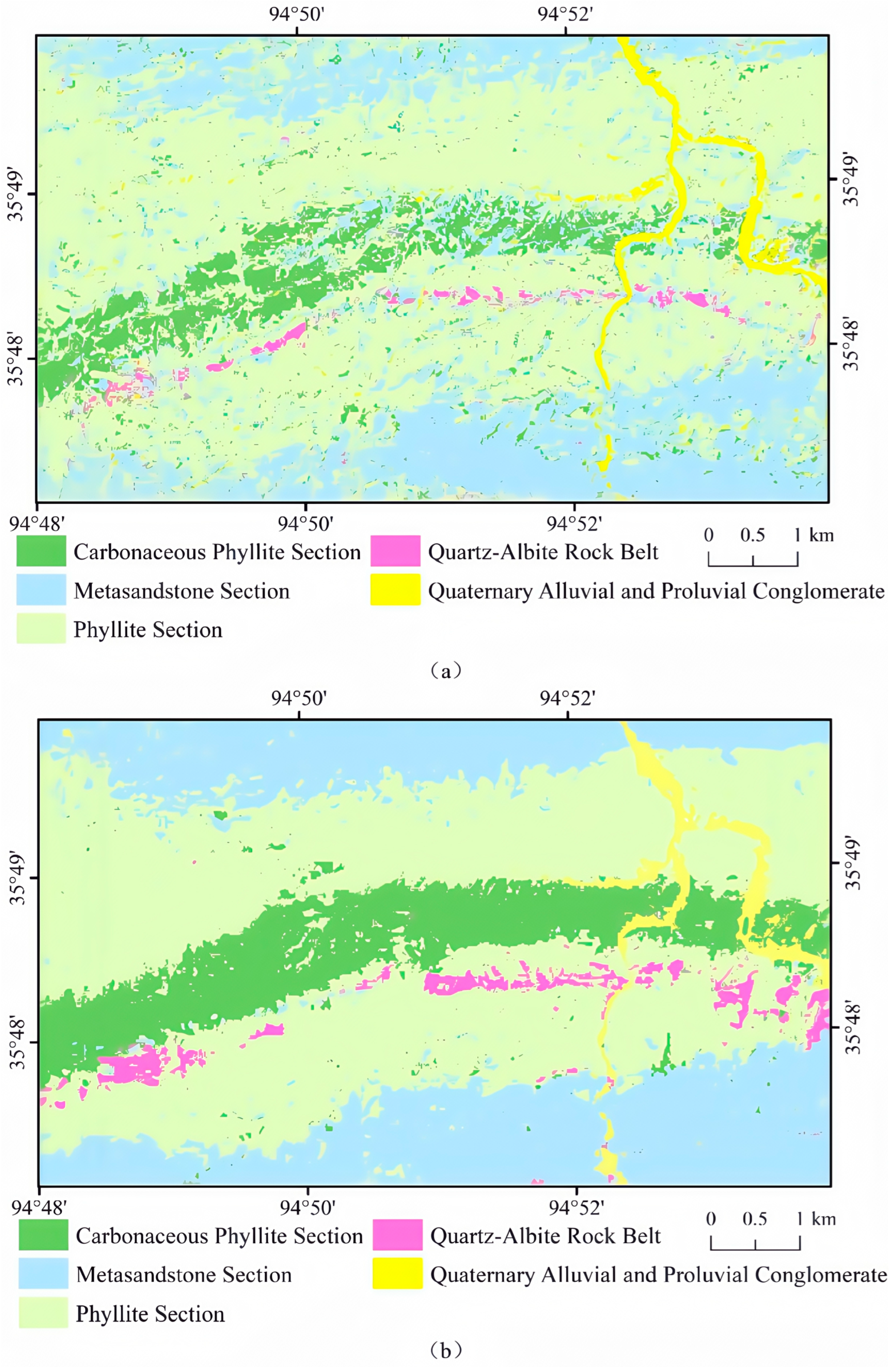
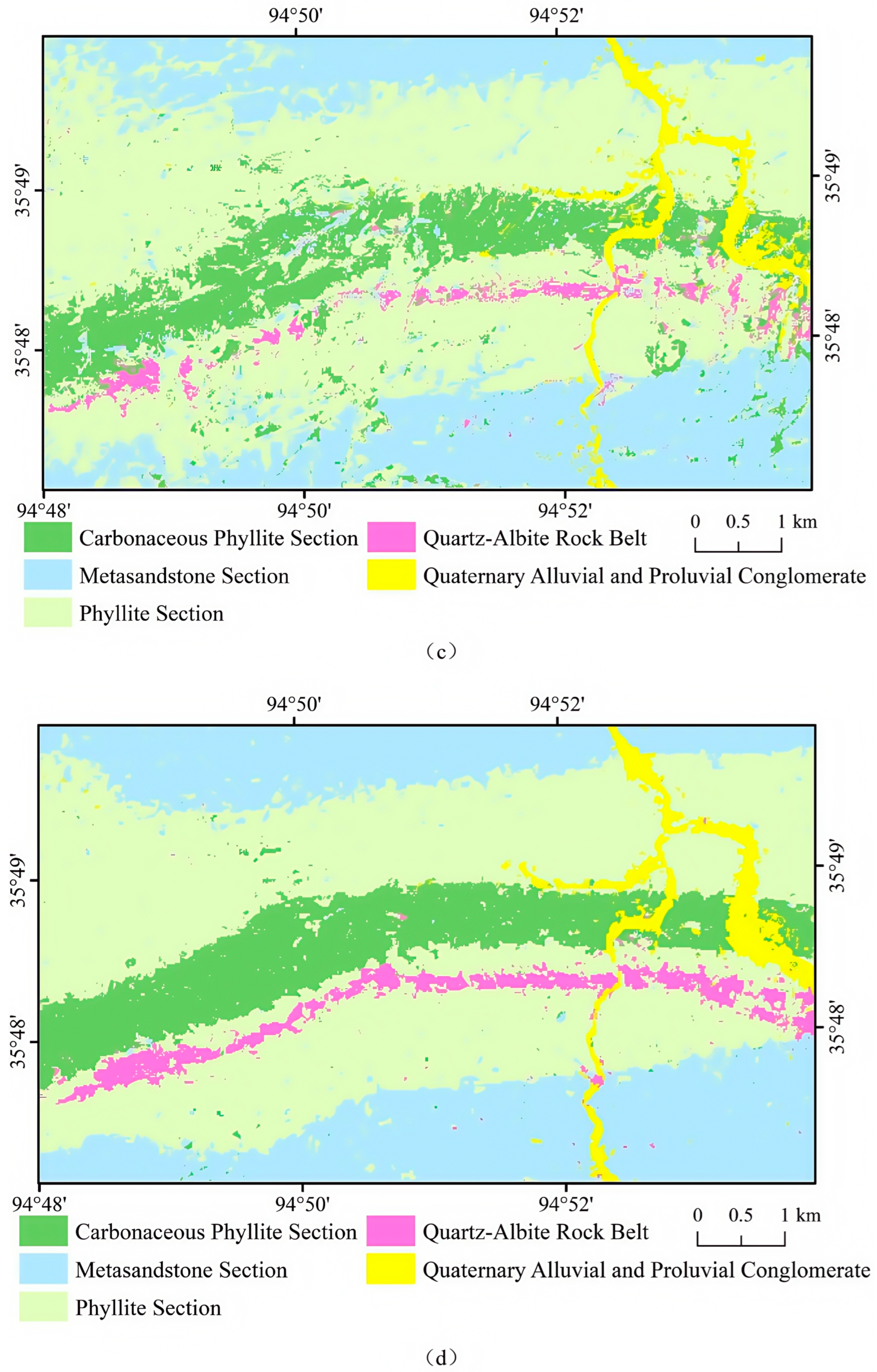
5. Results
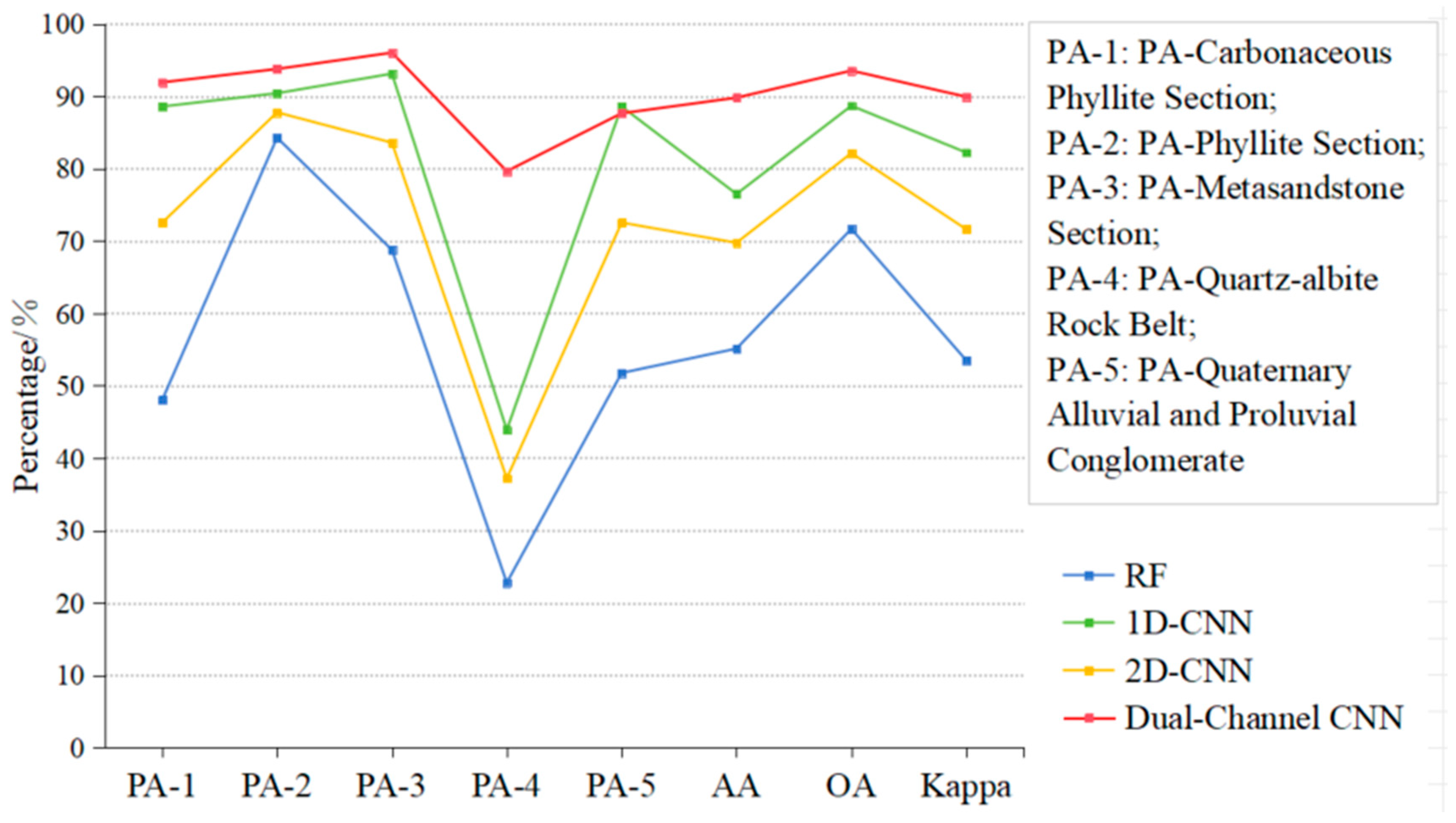
5.1. CNN-Based Lithology Identification and a Comparative Analysis
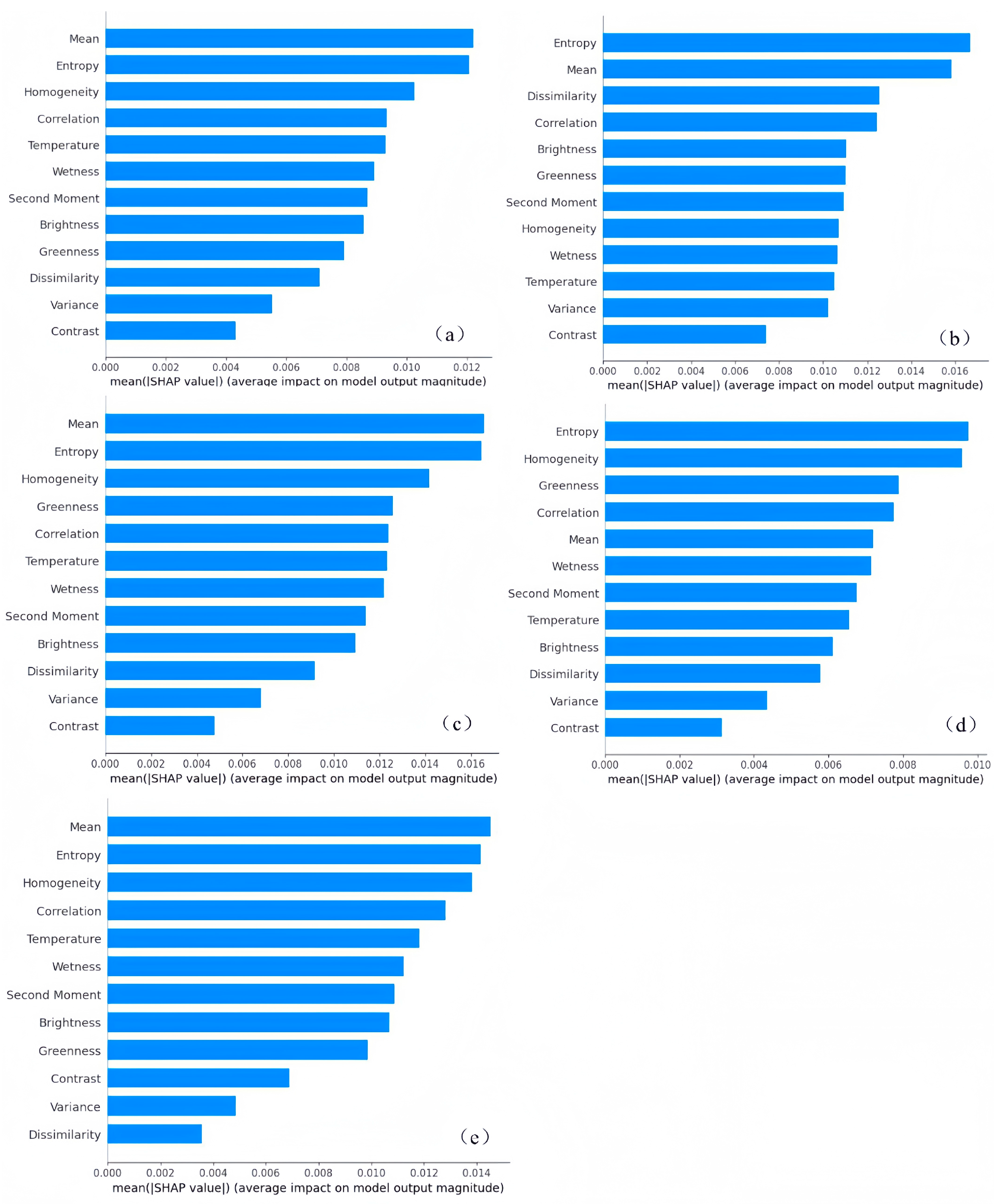
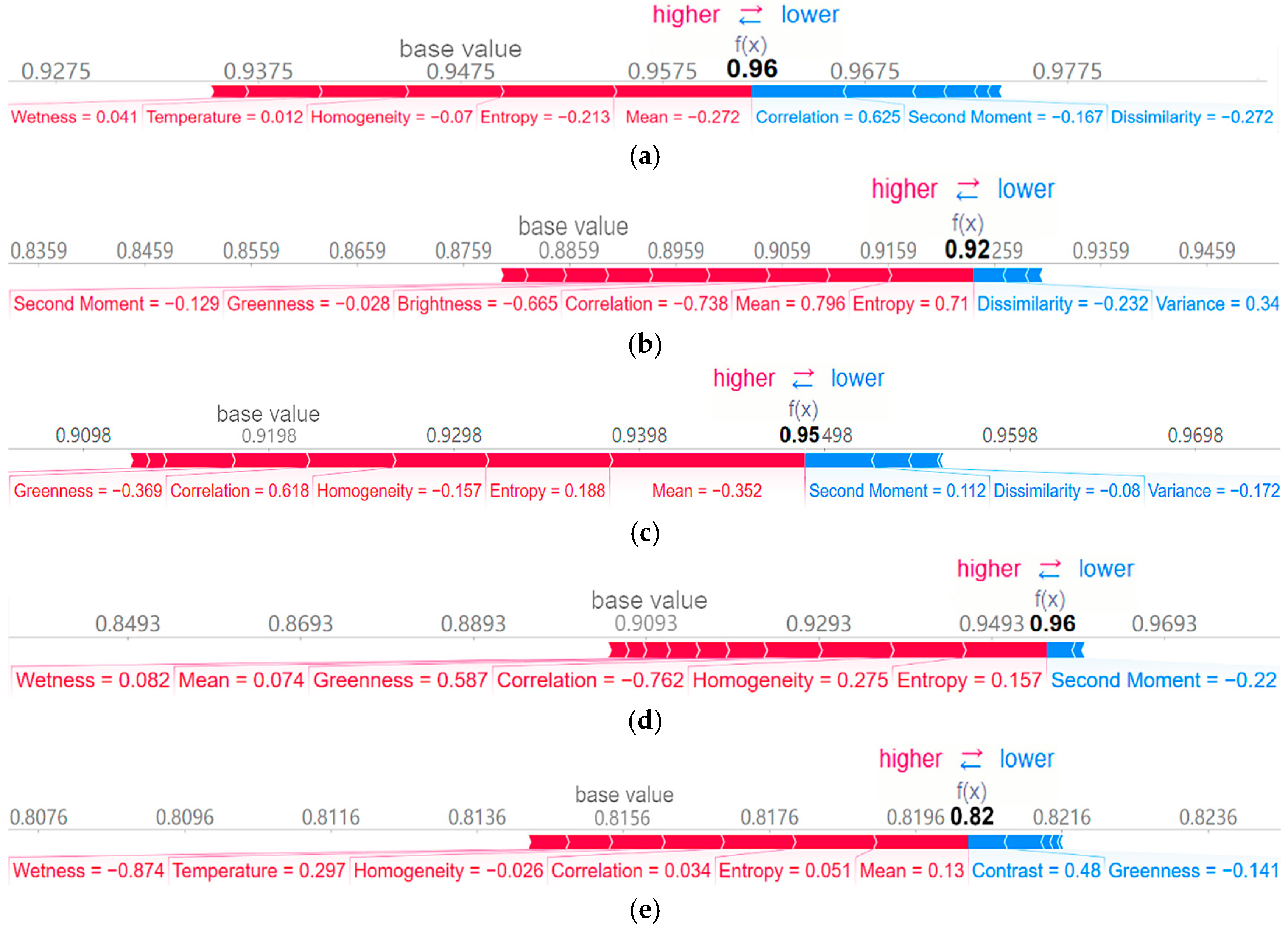
5.2. SHAP Method for Lithology Interpretation
6. Discussion
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Hu, J.; Chen, H.; Qiu, S.; Wang, G.; Liu, S.; Wang, J. Thoughts, principles and methods of regional geological survey in covered area (1: 50,000). Earth Sci. 2020, 45, 4291–4312. [Google Scholar]
- Xu, Z.; Ma, W.; Qiu, S. Lithology identification: Method, research status and intelligent development trend. Geol. Rev. 2022, 68, 2290–2304. [Google Scholar]
- Lu, D.; Weng, Q. A survey of image classification methods and techniques for remote sensing applications. Int. J. Remote Sens. 2018, 39, 1015–1052. [Google Scholar]
- Zhang, L.; Li, Y.; Chen, Y. Application of remote sensing in lithological mapping and exploration. J. Geophys. Res. Solid Earth 2020, 125, e2020JB019347. [Google Scholar]
- Wu, E.; Xi, W.; Wang, M.; Liu, X. Extraction and Analysis of Remote Sensing Erosion Information Based on Landsat-8OLI Data—A Case Study of Barkun Belekuduq Area in Xinjiang. West-China Explor. Eng. 2020, 32, 103–106. [Google Scholar]
- Liu, L.; Yin, C.; Shaheen Khalil, Y.; Hong, J.; Feng, J.; Zhang, H. Alteration Mapping for Porphyry Cu Targeting in the Western Chagai Belt, Pakistan, Using ZY1-02D Spaceborne Hyperspectral Data. Econ. Geol. 2024, 119, 331–353. [Google Scholar]
- Xi, J.; Jiang, Q.; Liu, H.; Gao, X. Lithological Mapping Research Based on Feature Selection Model of ReliefF-RF. Appl. Sci. 2023, 13, 11225. [Google Scholar] [CrossRef]
- Zhang, C.; Yu, J.; Hao, L.; Wang, S. Lithology extraction from synergies muti-scale texture and muti-spectra images. Geol. Sci. Technol. Inf. 2017, 36, 236–243. [Google Scholar]
- Liu, L.; Wang, L.; Zhang, K.; Mei, J.; Zhang, Q. Automatic lithology classification using remote sensing data in Huangshan area, East Tianshan, Xinjiang. Geol. Bull. China 2024, 1–11. [Google Scholar]
- Bengio, Y.; Courville, A.; Vincent, P. Representation Learning: A Review and New Perspectives. IEEE Trans. Pattern Anal. Mach. Intell. 2013, 35, 1798–1828. [Google Scholar]
- Liu, H.; Wu, K.; Zhou, D.; Xu, Y. A Novel Sample Generation Method for Deep Learning Lithological Mapping with Airborne TASI Hyperspectral Data in Northern Liuyuan, Gansu, China. Remote Sens. 2024, 16, 2852. [Google Scholar] [CrossRef]
- Maxwell, A.E.; Warner, T.A.; Fang, F. Implementation of machine-learning classification in remote sensing: An applied review. Int. J. Remote Sens. 2018, 39, 2784–2817. [Google Scholar]
- Zhang, L.; Zhang, L.; Du, B. Deep Learning for Remote Sensing Data: A Technical Tutorial on the State of the Art. IEEE Geosci. Remote Sens. Mag. 2016, 4, 22–40. [Google Scholar]
- Wang, Z.; Zuo, R.; Yang, F. Geological mapping using direct sampling and a convolutional neural network based on geochemical survey data. Math. Geosci. 2023, 55, 1035–1058. [Google Scholar]
- Imamverdiyev, Y.; Sukhostat, L. Lithological facies classification using deep convolutional neural network. J. Pet. Sci. Eng. 2019, 174, 216–228. [Google Scholar]
- Brandmeier, M.; Chen, Y. Lithological classification using multi-sensor data and convolutional neural networks. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, 42, 55–59. [Google Scholar]
- Xu, Z.; Ma, W.; Lin, P.; Shi, H.; Liu, T.; Pan, D. Intelligent lithology identification based on transfer learning of rock images. J. Basic Sci. Eng. 2021, 29, 1075–1092. [Google Scholar]
- Li, F.; Li, X.; Chen, W.; Dong, Y.; Li, Y.; Wang, L. Automatic lithology classification based on deep features using dual polarization SAR images. Earth Sci. 2022, 47, 4267–4279. [Google Scholar]
- Da, S.; Sun, X.; Zhang, J.; Zhu, Y.; Wang, B.; Song, D. Multi-scale Convolutional Neural Network based Lithology Classification Method for Multi-source Data Fusion. Laser Optoelectron. Prog. 2024, 61, 373–382. [Google Scholar]
- Du, P.; Xia, J.; Xue, C.; Tan, K.; Su, H.; Bao, R. Review of hyperspectral remote sensing image classification. J. Remote Sens. 2016, 20, 236–256. [Google Scholar]
- Liu, H.; Zhang, H.; Yang, R. Lithological Classification by Hyperspectral Remote Sensing Images Based on Double-Branch Multi-Scale Dual-Attention Network. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2024, 17, 14726–14741. [Google Scholar] [CrossRef]
- Jia, S.; Deng, X.; Xu, M.; Zhou, J.; Jia, X. Superpixel-level weighted label propagation for hyperspectral image classification. IEEE Trans. Geosci. Remote Sens. 2020, 58, 5077–5091. [Google Scholar] [CrossRef]
- Hewson, R.; Mshiu, E.; Hecker, C.; Werff, H.; Ruitenbeek, F.; Alkema, D.; Meer, F. The application of day and night time ASTER satellite imagery for geothermal and mineral mapping in East Africa. Int. J. Appl. Earth Obs. Geoinf. 2020, 85, 101991. [Google Scholar] [CrossRef]
- Pour, A.B.; Park, Y.; Park, T.S.; Hong, J.K.; Hashim, M.; Woo, J.; Ayoobi, I. Regional geology mapping using satellite-based remote sensing approach in Northern Victoria Land, Antarctica. Polar Sci. 2018, 16, 23–46. [Google Scholar] [CrossRef]
- Mitchell, J.; Shrestha, R.; Moore-Ellison, C.A.; Glenn, N.F. Single and multi-date Landsat classifications of basalt to support soil survey efforts. Remote Sens. 2013, 5, 4857–4876. [Google Scholar] [CrossRef]
- Hua, Y.; Zhang, D.; Ge, S. Research progress in the interpretability of deep learning models. J. Cyber Secur. 2020, 5, 1–12. [Google Scholar]
- Kui, M.; Zhang, A.; Liu, Y.; Liu, Z.; He, S.; Zhang, J.; Li, Z. The geological characteristics and prospecting mode of Tuolugou cobalt deposit, Qinghai. Miner. Explor. 2019, 10, 57–64. [Google Scholar]
- Shi, J.; Zhang, H.; Li, J. Explainable and explicit visual reasoning over scene graphs. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 8376–8384. [Google Scholar]
- Niu, S.; Wu, H.; Niu, X.; Wang, Y.; Bai, S. Recognition of natrojarosite in Tuolugou Co(Au) deposit in middle-east section of East Kunlun Metallogenic Belt and its significance. Miner. Depos. 2022, 41, 1232–1244. [Google Scholar]
- Wu, K.; Fan, J.; Ye, P.; Zhu, M. Hyperspectral image classification using spectral–spatial token enhanced transformer with hash-based positional embedding. IEEE Trans. Geosci. Remote Sens. 2023, 61, 5507016. [Google Scholar] [CrossRef]
- Chen, W. Gaofen-5 02 Satellite. In Satellite Application 10; Satellite Application: Beijing, China, 2021; Volume 69. [Google Scholar]
- Qian, S. Hyperspectral satellites, evolution, and development history. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 7032–7056. [Google Scholar] [CrossRef]
- Zhang, M.; Wen, Y.; Sun, L.; Li, Y. Overview and application of GaoFen 5-02 satellite. Aerosp. China 2022, 12, 8–15. [Google Scholar]
- Liu, Y.; Sun, D.; Hu, X.; Ye, X.; Li, Y.; Liu, S.; Cao, K.; Chai, M.; Zhang, J.; Zhang, Y. The advanced hyperspectral imager: Aboard China’s GaoFen-5 satellite. IEEE Geosci. Remote Sens. Mag. 2019, 7, 23–32. [Google Scholar]
- Guo, S.; Jiang, Q. Lithology classification of L-band SAR data by combining backscattering and polarization characteristics. World Geol. 2024, 43, 413–423+451. [Google Scholar]
- Lv, Y.; Yang, C. Rock Image Feature Analysis and Classification Using Multi-Source and Multi-Temporal Remote Sensing Data. Ph.D. Thesis, Jilin University, Jilin, China, 2023. [Google Scholar]
- Bai, L.; Dai, J.; Wang, N.; Li, B.; Liu, Z.; Li, Z.; Chen, W. Remote sensing alteration information extraction and ore prospecting indication in Zhule-Mangla region of Tibet based on the GF-5 satellite. Geol. China. 2024, 51, 995–1007. [Google Scholar]
- Wang, C.; Xue, R.; Zhao, S.; Liu, S.; Wang, X.; Li, H.; Liu, Z. Quality evaluation and analysis of GF-5 hyperspectral image data. Geogr. Geo-Inf. Sci. 2021, 37, 33–38. [Google Scholar]
- Du, X.; Lou, D.; Zhang, C.; Xu, L.; Liu, H.; Fan, Y.; Zhang, L.; Hu, J.; Li, B. Study on extraction of alteration information from GF-5, Landsat-8 and GF-2 remote sensing data: A case study of Ningnan lead-zinc ore concentration area in Sichuan Province. Mineral. Depos. 2022, 41, 839–858. [Google Scholar]
- Tan, B.; Li, Z.; Chen, E.; Pang, Y. Preprocessing of EO-1 Hyperion hyperspectral data. Remote Sens. Inf. 2005, 6, 36–41. [Google Scholar]
- Hu, S.; Meiyuan, C.; Xiaohui, Y.; Xiaofeng, J.; Jing, Y.; Yuxi, W.; Tianfu, H. Preliminary application of GF-5 satellite hyperspectral data in geological prospecting: A case study of Liuchengzi area in the eastern section of Aljin. Gansu Geol. 2020, 29, 47–57. [Google Scholar]
- Belenok, V.; Noszczyk, T.; Hebryn, B.L.; Kryachok, S. Investigating anthropogenically transformed landscapes with remote sensing. Remote Sens. Appl. Soc. Environ. 2021, 24, 100635. [Google Scholar]
- Kauth, R.J.; Thomas, G. The tasselled cap—A graphic description of the spectral-temporal development of agricultural crops as seen by Landsat. In Proceedings of the LARS Symposia, West Lafayette, IN, USA, 29 June–1 July 1976; p. 159. [Google Scholar]
- Crist, E.P.; Laurin, R.; Cicone, R.C. Vegetation and soils information contained in transformed Thematic Mapper data. In Proceedings of the IGARSS’86 Symposium, Zurich, Switzerland, 8–11 September 1986; pp. 1465–1470. [Google Scholar]
- Mostafiz, C.; Chang, N.B. Tasseled cap transformation for assessing hurricane landfall impact on a coastal watershed. Int. J. Appl. Earth Obs. Geoinf. 2018, 73, 736–745. [Google Scholar] [CrossRef]
- Haralick, R.M.; Shanmugam, K.; Dinstein, I.H. Textural features for image classification. IEEE Trans. Syst. Man Cybern. 1973, 6, 610–621. [Google Scholar] [CrossRef]
- Liu, H.; Wu, K.; Xu, H.; Xu, Y. Lithology classification using TASI thermal infrared hyperspectral data with convolutional neural networks. Remote Sens. 2021, 13, 3117. [Google Scholar] [CrossRef]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. Imagenet classification with deep convolutional neural networks. Adv. Neural Inf. Process. Syst. 2012, 25, 84–90. [Google Scholar] [CrossRef]
- Gao, L.; Chen, P.; Yu, S. Demonstration of convolution kernel operation on resistive cross-point array. IEEE Electron. Device Letters. 2016, 37, 870–873. [Google Scholar] [CrossRef]
- Gao, Z. Research and Application of Image Classification Method Based on Deep Convolutional Neural Network. Ph.D. Thesis, University of Science and Technology of China, Hefei, China, 2018. [Google Scholar]
- Liu, L.; Ouyang, W.; Wang, X.; Fieguth, P.; Chen, J.; Liu, X. Pietikäinen. Deep learning for generic object detection: A survey. Int. J. Comput. Vis. 2020, 128, 261–318. [Google Scholar] [CrossRef]
- Ai-min, L.; Meng, F.; Guang, D.; Hai, L.; You, C. Water quality parameter COD retrieved from remote sensing based on convolutional neural network model. Spectrosc. Spectr. Anal. 2023, 43, 651–656. [Google Scholar]
- Tang, T.; Xin, P. Deep Learning Based Hyperspectral Image Classification Algorithms with Small Samples. Master’s Thesis, Inner Mongolia Agricultural University, Inner Mongolia, China, 2023. [Google Scholar]
- Hu, L.; Shan, R.; Wang, F.; Jiang, G.; Zhao, J.; Zhang, Z. Hyperspectral image classification based on dual-channel dilated convolution neural network. Laser Optoelectron 2020, 57, 356–362. [Google Scholar]
- Makantasis, K.; Karantzalos, K.; Doulamis, A.; Doulamis, N. Deep supervised learning for hyperspectral data classification through convolutional neural networks. In Proceedings of the 2015 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Milan, Italy, 26–31 July 2015; pp. 4959–4962. [Google Scholar]
- Bachri, I.; Hakdaoui, M.; Raji, M.; Teodoro, A.C.; Benbouziane, A. Machine learning algorithms for automatic lithological mapping using remote sensing data: A case study from Souk Arbaa Sahel, Sidi Ifni Inlier, Western Anti-Atlas, Morocco. ISPRS Int. J. Geo-Inf. 2019, 8, 248. [Google Scholar] [CrossRef]
- Kumar, C.; Chatterjee, S.; Oommen, T.; Guha, A. Automated lithological mapping by integrating spectral enhancement techniques and machine learning algorithms using AVIRIS-NG hyperspectral data in Gold-bearing granite-greenstone rocks in Hutti, India. Int. J. Appl. Earth Obs. Geoinf. 2020, 86, 102006. [Google Scholar] [CrossRef]
- Zhang, Z. Forest Land Types Precise Classification and Change Monitoring Based on Multi-Source Remote Sensing Data. Master’s Thesis, Xi’an University Of Science And Technology, Xi’an, Chian, 2018. [Google Scholar]
- Liang, Y.; Li, S.; Yan, C.; Li, M.; Jiang, C. Explaining the black-box model: A survey of local interpretation methods for deep neural networks. Neurocomputing 2021, 419, 168–182. [Google Scholar] [CrossRef]
- Rudin, C. Stop explaining black box machine learning models for high stakes decisions and use interpretable models instead. Nat. Mach. Intell. 2019, 1, 206–215. [Google Scholar]
- Wang, J.; Gou, L.; Zhang, W.; Yang, H.; Shen, H. Deepvid: Deep visual interpretation and diagnosis for image classifiers via knowledge distillation. IEEE Trans. Vis. Comput. Graph. 2019, 25, 2168–2180. [Google Scholar] [PubMed]
- Zhang, Q.; Zhu, S. Visual interpretability for deep learning: A survey. Front. Inf. Technol. Electron. Eng. 2018, 19, 27–39. [Google Scholar]
- Shang, Z. Research on Hyperspectral Remote Sensing Image Classification and Interpretability Based on 3D CNN. Master’s Thesis, Xi’an University of Technology, Xi’an, China, 2023. [Google Scholar]
- Qi, W.; Sun, R. Prediction and analysis model for ground peak acceleration based on XGBoost and SHAP. Chin. J. Geotech. Eng. 2023, 45, 1934–1943. [Google Scholar]
- Lundberg, S. A unified approach to interpreting model predictions. arXiv 2017, arXiv:1705.07874. [Google Scholar]
- Wu, K.; Zhan, Y.; An, Y.; Li, S. Multiscale Feature Search-Based Graph Convolutional Network for Hyperspectral Image Classification. Remote Sens. 2024, 16, 2328. [Google Scholar] [CrossRef]
- Chen, Y.; Yanfan, M. Identification of Hyperspectral Mineral Type Using Deep Learning Method Supported by Ground Object Spectral Library. Master’s Thesis, Shandong University of Science and Technology, Shangdong, China, 2020. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Zhang, H.; Liu, H.; Yang, R.; Wang, W.; Luo, Q.; Tu, C. Hyperspectral Image Classification Based on Double-Branch Multi-Scale Dual-Attention Network. Remote Sens. 2024, 16, 2051. [Google Scholar] [CrossRef]
- Zhang, A.; Wang, J.; Liu, G.; Ma, Z. Main minerogenetic series in the Qimantag area, Qinghai Province, and their metallogenic models. Acta Meteorol. Sin. 2021, 41, 1–22. [Google Scholar]
- Aksoy, S.; Sertel, E.; Roscher, R.; Tanik, A.; Hamzehpour, N. Assessment of soil salinity using explainable machine learning methods and Landsat 8 images. Int. J. Appl. Earth Obs. Geoinf. 2024, 130, 103879. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| EO-1 Hyperion | PRISMA | Gaofen-5 | GF5B | |
|---|---|---|---|---|
| Spectral Range (μm) | 0.4–2.5 | 0.4–2.5 | 0.45–2.5 | 0.45–2.5 |
| Spectral Resolution | 10 nm | 12 nm | 5–10 nm | 5–10 nm |
| Spatial Resolution | 30 m | 30 m | 30 m | 30 m |
| Signal-to-Noise Ratio (VNIR/SWIR) | ~50/~30 | >200/>100 | >150/>100 | >200/>150 |
| Swath Width (km) | 7.5 | 30 | 60 | 60 |
| Key Advantages | Pioneer (decommissioned) | Hyperspectral–Panchromatic synergy | Multi-sensor synergy | High SNR, low noise, wide swath |
| Waveband | Number of Bands | Wavelength/nm | Spectral Resolution/nm | Spatial Resolution/nm | Width/KM |
|---|---|---|---|---|---|
| VNIR | 150 | 387–1024 | 5 | 30 | 60 |
| SWIR | 180 | 1009–2515 | 10 |
| Waveband | Wavelength/nm | Drawbacks | Amount |
|---|---|---|---|
| Band151–band153 | 1009–1025 | Repeat band | 37 |
| Band192 | 1354 | Low SNR | |
| Band193–band200 | 1362–1421 | Water vapor absorption | |
| Band246–band262 | 1808–1943 | Water vapor absorption | |
| Band298–band299 | 2246–2254 | Low SNR | |
| Band325–band330 | 2422–2515 | Low SNR |
| Layers | Output Shape | Parameters |
|---|---|---|
| Input | (None, 293, 1) | - |
| Conv1D-1 | (None, 293, 16) | kernel size = 3, stride = 1 |
| Conv1D-2 | (None, 293, 32) | kernel size = 3, stride = 1 |
| MaxPooling1D-1 | (None, 146, 32) | pool size = 2, stride = 2 |
| Conv1D-3 | (None, 146, 64) | kernel size = 3, stride = 1 |
| MaxPooling1D-2 | (None, 73, 64) | pool size = 2, stride = 2 |
| Flatten | (None, 4672) | - |
| Dense_spectral | (None, 128) | activation = Relu |
| Layers | Output Shape | Parameters |
|---|---|---|
| Input | (None, 3, 3, 12) | - |
| Conv2D-1 | (None, 5, 5, 16) | kernel size = 5 × 5, stride = 1 |
| Conv2D-2 | (None, 5, 5, 32) | kernel size = 5 × 5, stride = 1 |
| Conv2D-3 | (None, 3, 3, 64) | kernel size = 3 × 3, stride = 1 |
| Residual Block | (None, 3, 3, 128) | kernel size = 3 × 3, stride = 1 |
| GAP | (None, 128) | - |
| Dense1_spatial | (None, 256) | activation = Relu |
| Dropout | (None, 256) | Dropout rate = 0.25 |
| Dense2_spatial | (None, 128) | activation = Relu |
| Layers | Output Shape | Parameters |
|---|---|---|
| Concatenate | (None, 256) | - |
| Dense | (None, 512) | activation = Relu |
| BatchNormalization | (None, 512) | - |
| Activation | (None, 512) | activation = Relu |
| Dropout | (None, 512) | Dropout rate = 0.25 |
| Output | (None, num_classes) | activation = Softmax |
| RF | 1D-CNN | 2D-CNN | DC-CNN | ||
|---|---|---|---|---|---|
| PA/% | Carbonaceous Phyllite Section | 48.03 | 88.56 | 72.52 | 91.89 |
| Phyllite Section | 84.25 | 90.39 | 87.75 | 93.74 | |
| Metasandstone Section | 68.75 | 93.09 | 83.56 | 95.99 | |
| Quartz–Albite Rock Belt | 22.79 | 43.90 | 37.20 | 79.62 | |
| Quaternary Alluvial and Proluvial Conglomerate | 51.76 | 88.56 | 72.52 | 87.62 | |
| AA/% | 55.12 | 80.90 | 70.71 | 89.77 | |
| OA/% | 71.65 | 88.66 | 82.12 | 93.51 | |
| Kappa | 0.535 | 0.822 | 0.716 | 0.899 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, S.; Liu, Y. Interpretable Dual-Channel Convolutional Neural Networks for Lithology Identification Based on Multisource Remote Sensing Data. Remote Sens. 2025, 17, 1314. https://doi.org/10.3390/rs17071314
Wu S, Liu Y. Interpretable Dual-Channel Convolutional Neural Networks for Lithology Identification Based on Multisource Remote Sensing Data. Remote Sensing. 2025; 17(7):1314. https://doi.org/10.3390/rs17071314
Chicago/Turabian StyleWu, Sijian, and Yue Liu. 2025. "Interpretable Dual-Channel Convolutional Neural Networks for Lithology Identification Based on Multisource Remote Sensing Data" Remote Sensing 17, no. 7: 1314. https://doi.org/10.3390/rs17071314
APA StyleWu, S., & Liu, Y. (2025). Interpretable Dual-Channel Convolutional Neural Networks for Lithology Identification Based on Multisource Remote Sensing Data. Remote Sensing, 17(7), 1314. https://doi.org/10.3390/rs17071314