

A Novel Method for Eliminating Glint in Water-Leaving Radiance from UAV Multispectral Imagery


Abstract
1. Introduction
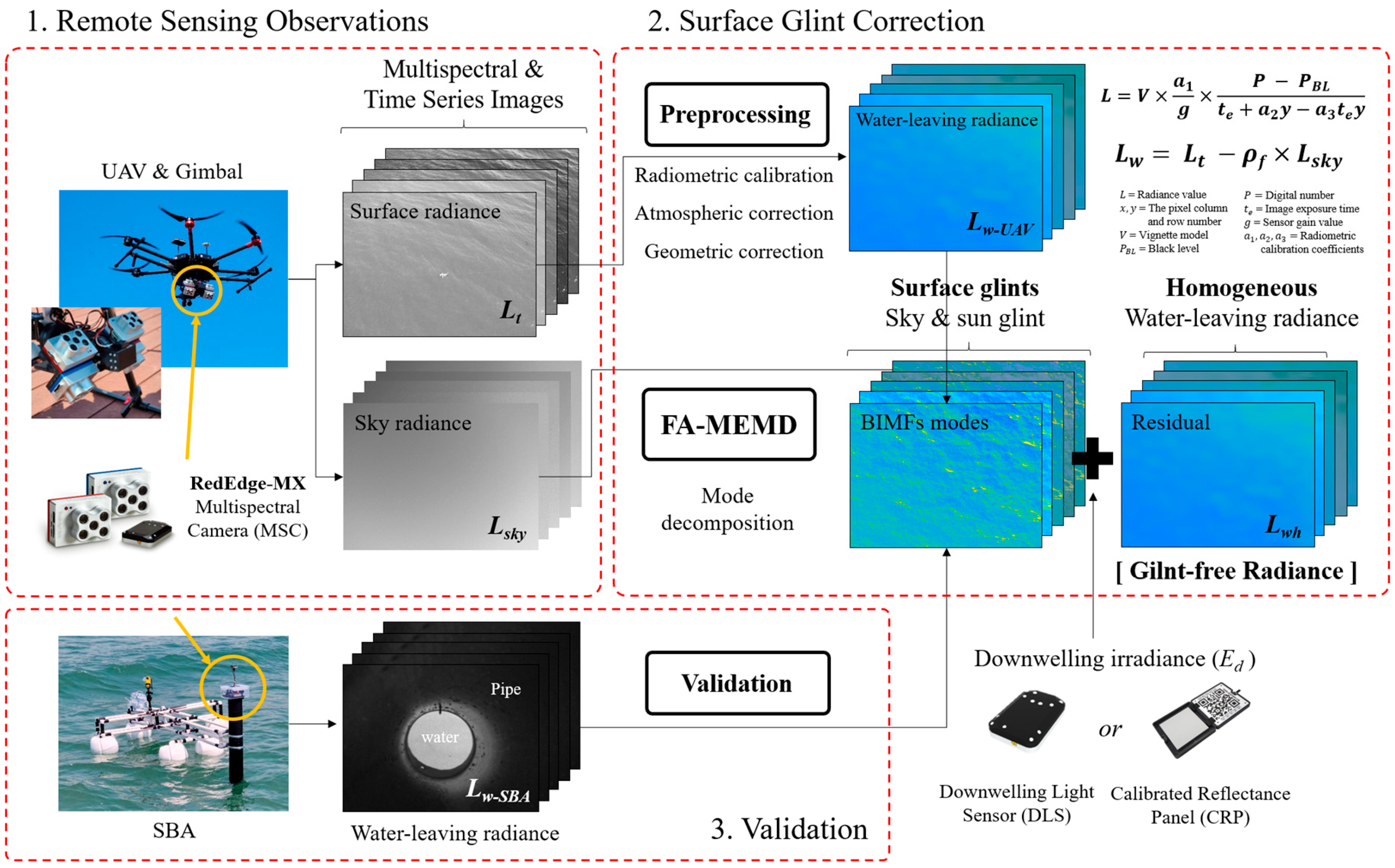
2. Methodology
2.1. Preprocessing of Multispectral Images
2.2. FA-MEMD
3. Study Area and Datasets
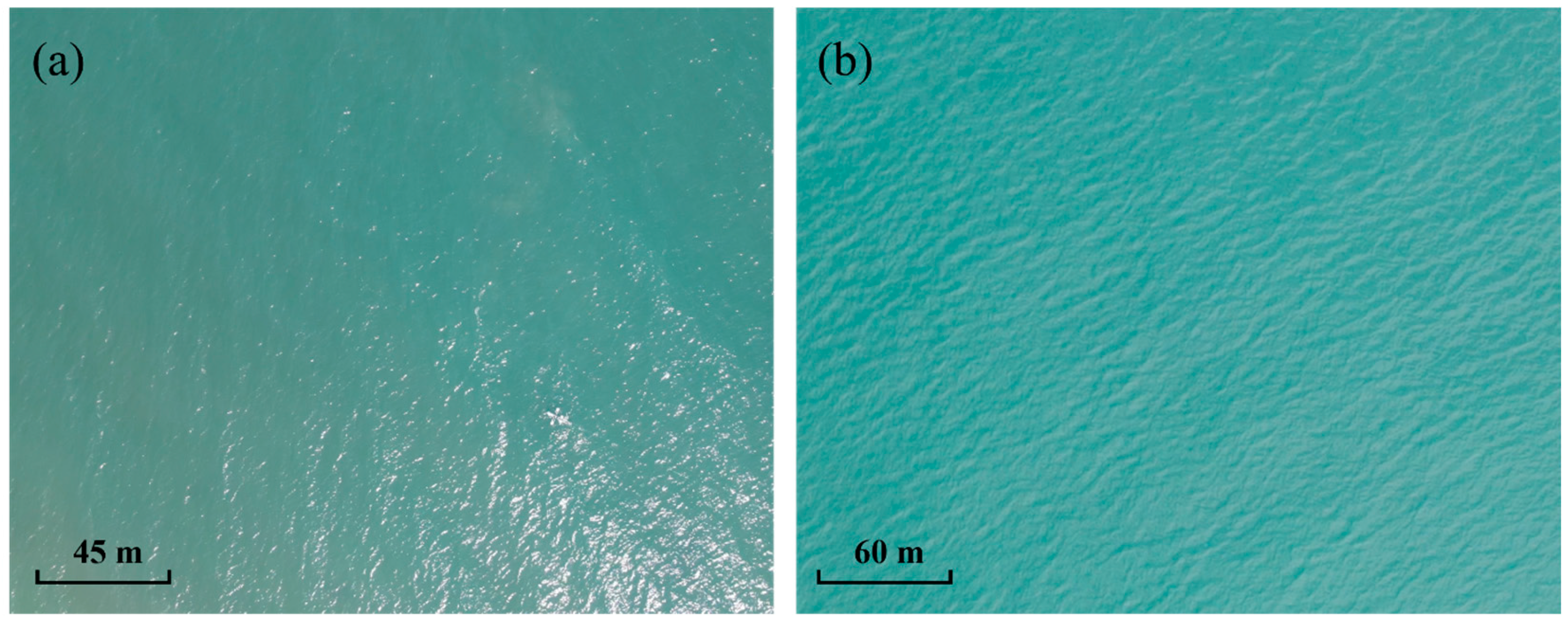
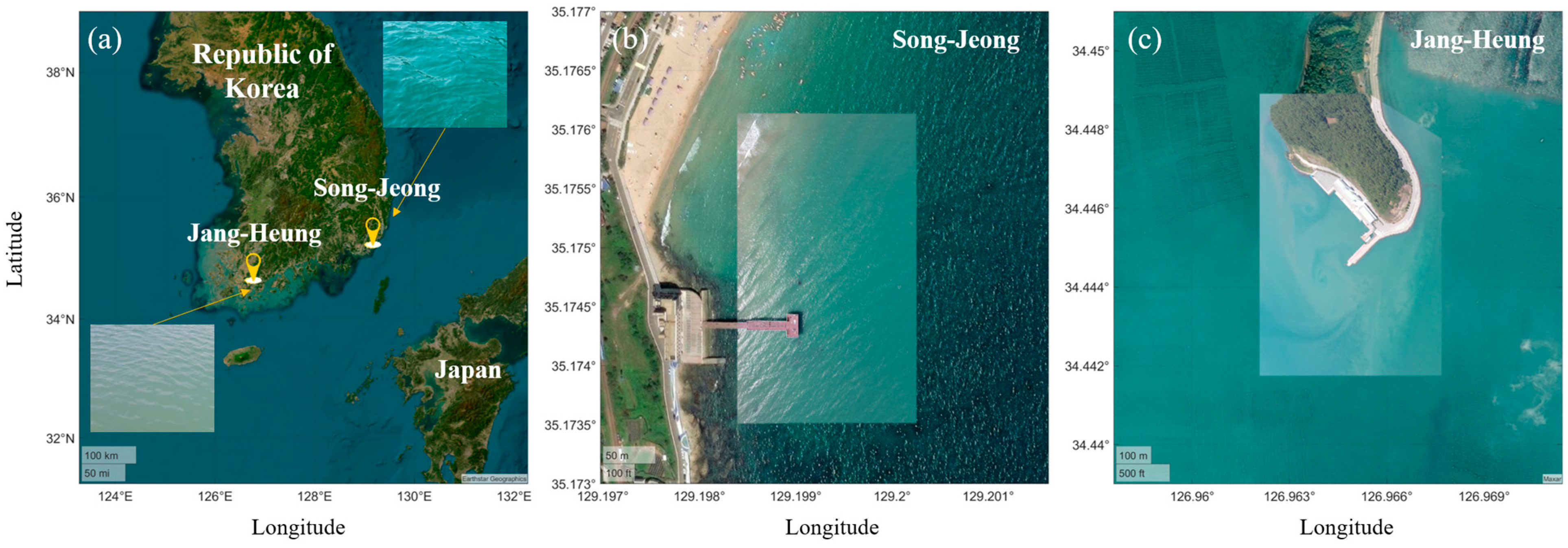
3.1. Study Areas in Clear and Turbid Coastal Environments
3.2. Multispectral Sensor on UAV Observations
3.3. In Situ SBA Observations
4. Results
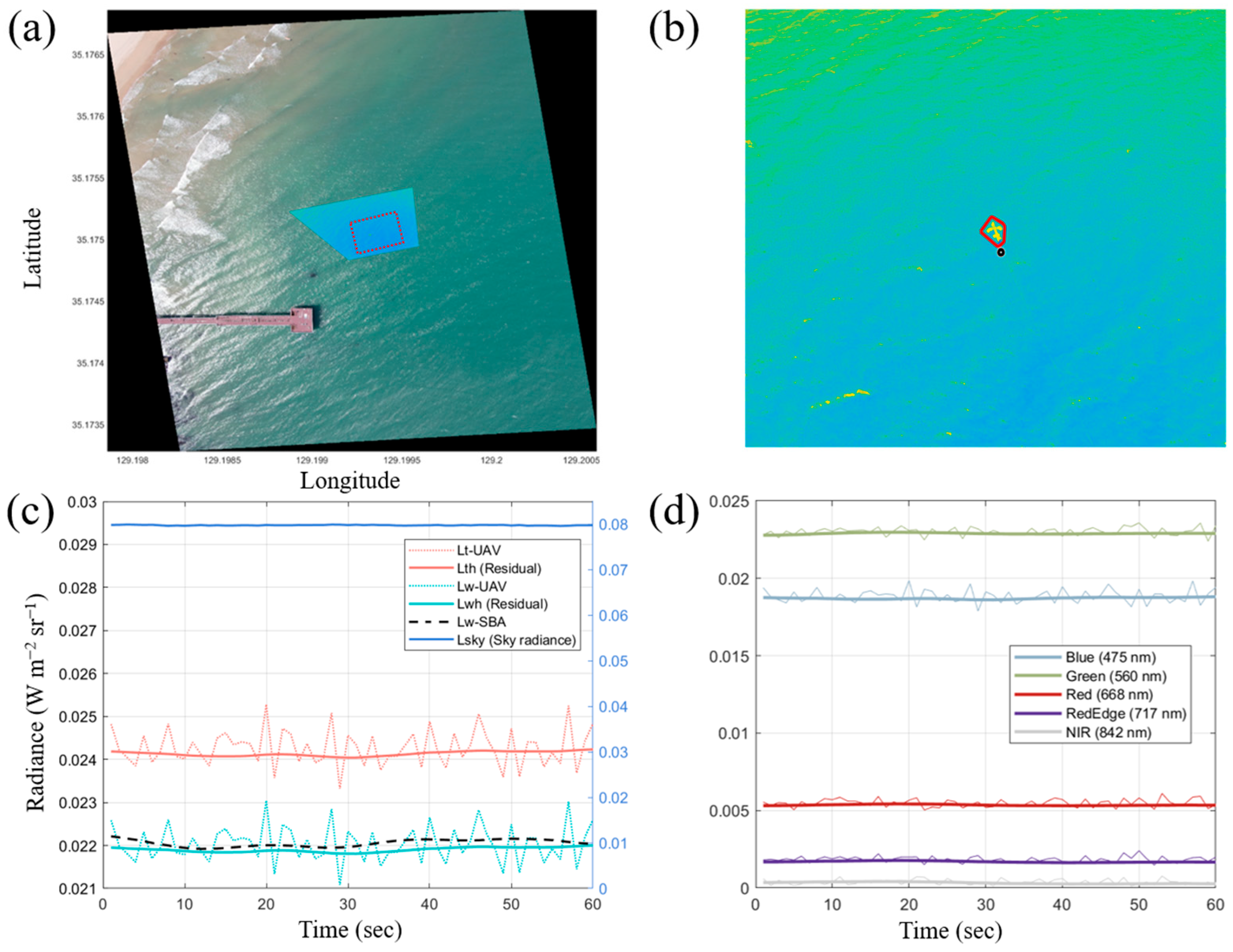
4.1. Decomposition of Surface Glint Signals Through FA-MEMD
4.2. Validation of Radiance in the Residual Image over Time
4.3. Comparison with Previous Studies on Glint Correction Methods
5. Discussion
5.1. Parameter and Input Data Setup for FA-MEMD
5.2. Influence of Non-Periodic Signals
5.3. Geometric Stability of Input Data for FA-MEMD
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Colomina, I.; Molina, P. Unmanned aerial systems for photogrammetry and remote sensing: A review. ISPRS J. Photogramm. Remote Sens. 2014, 92, 79–97. [Google Scholar] [CrossRef]
- Lee, J.S.; Baek, J.Y.; Shin, J.; Kim, J.S.; Jo, Y.H. Suspended Sediment Concentration Estimation along Turbid Water Outflow Using a Multispectral Camera on an Unmanned Aerial Vehicle. Remote Sens. 2023, 15, 5540. [Google Scholar] [CrossRef]
- Baek, J.Y.; Jo, Y.H.; Kim, W.; Lee, J.S.; Jung, D.; Kim, D.W.; Nam, J. A new algorithm to estimate chlorophyll-a concentrations in turbid yellow sea water using a multispectral sensor in a low-altitude remote sensing system. Remote Sens. 2019, 11, 2257. [Google Scholar] [CrossRef]
- Román, A.; Tovar-Sánchez, A.; Gauci, A.; Deidun, A.; Caballero, I.; Colica, E.; Navarro, G. Water-Quality Monitoring with a UAV-Mounted Multispectral Camera in Coastal Waters. Remote Sens. 2022, 15, 237. [Google Scholar] [CrossRef]
- Yurovsky, Y.Y.; Kubryakov, A.A.; Plotnikov, E.V.; Lishaev, P.N. Submesoscale currents from UAV: An experiment over small-scale eddies in the coastal black sea. Remote Sens. 2022, 14, 3364. [Google Scholar] [CrossRef]
- Specht, M. Methodology for Performing Bathymetric and Photogrammetric Measurements Using UAV and USV Vehicles in the Coastal Zone. Remote Sens. 2024, 16, 3328. [Google Scholar] [CrossRef]
- Kim, S.Y.; Lee, J.S.; Jeong, Y.; Jo, Y.H. Decomposition of Submesoscale Ocean Wave and Current Derived from UAV-Based Observation. Remote Sens. 2024, 16, 2275. [Google Scholar] [CrossRef]
- Anderson, K.; Gaston, K.J. Lightweight unmanned aerial vehicles will revolutionize spatial ecology. Front. Ecol. Environ. 2013, 11, 138–146. [Google Scholar] [CrossRef]
- Kay, S.; Hedley, J.D.; Lavender, S. Sun glint correction of high and low spatial resolution images of aquatic scenes: A review of methods for visible and near-infrared wavelengths. Remote Sens. 2009, 1, 697–730. [Google Scholar] [CrossRef]
- Gao, B.C.; Li, R.R. Correction of sunglint effects in high spatial resolution hyperspectral imagery using SWIR or NIR bands and taking account of spectral variation of refractive index of water. Adv. Environ. Eng. Res. 2021, 2, 1–15. [Google Scholar] [CrossRef]
- Mobley, C.D. Light and Water: Radiative Transfer in Natural Waters; Academic Press: San Diego, CA, USA, 1994; Available online: https://cir.nii.ac.jp/crid/1130282269840486656 (accessed on 25 February 2025).
- NASA Earth Observatory. The Science of Sunglint. Available online: https://earthobservatory.nasa.gov/images/84333/the-science-of-sunglint (accessed on 27 December 2024).
- Hodgson, A.; Kelly, N.; Peel, D. Unmanned aerial vehicles (UAVs) for surveying marine fauna: A dugong case study. PLoS ONE 2013, 8, e79556. [Google Scholar] [CrossRef] [PubMed]
- Subhan, B.; Arafat, D.; Santoso, P.; Pahlevi, K.; Prabowo, B.; Taufik, M.; Madduppa, H. Development of observing dolphin population method using Small Vertical Take-off and Landing (VTOL) Unmanned Aerial System (AUV). IOP Conf. Ser. Earth Environ. Sci. 2019, 278, 012074. [Google Scholar] [CrossRef]
- Turner, D.; Lucieer, A.; Wallace, L. Direct georeferencing of ultrahigh-resolution UAV imagery. IEEE Trans. Geosci. Remote Sens. 2013, 52, 2738–2745. [Google Scholar] [CrossRef]
- Casella, E.; Collin, A.; Harris, D.; Ferse, S.; Bejarano, S.; Parravicini, V.; Rovere, A. Mapping coral reefs using consumer-grade drones and structure from motion photogrammetry techniques. Coral Reefs 2017, 36, 269–275. [Google Scholar] [CrossRef]
- Dietrich, J.T. Bathymetric structure-from-motion: Extracting shallow stream bathymetry from multi-view stereo photogrammetry. Earth Surf. Process. Landf. 2017, 42, 355–364. [Google Scholar] [CrossRef]
- Taddia, Y.; Stecchi, F.; Pellegrinelli, A. Using DJI Phantom 4 RTK drone for topographic mapping of coastal areas. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, 42, 625–630. [Google Scholar] [CrossRef]
- Román, A.; Heredia, S.; Windle, A.E.; Tovar-Sánchez, A.; Navarro, G. Enhancing Georeferencing and Mosaicking Techniques over Water Surfaces with High-Resolution Unmanned Aerial Vehicle (UAV) Imagery. Remote Sens. 2024, 16, 290. [Google Scholar] [CrossRef]
- Shaw, J.A.; Vollmer, M. Blue sun reflected from water: Optical lessons from observations of nature. In Education and Training in Optics and Photonics; Optica Publishing Group: Washington, DC, USA, 2017; p. 104523B. [Google Scholar]
- Mobley, C.D. Estimation of the remote-sensing reflectance from above-surface measurements. Appl. Opt. 1999, 38, 7442–7455. [Google Scholar] [CrossRef]
- Joyce, K.E.; Duce, S.; Leahy, S.M.; Leon, J.; Maier, S.W. Principles and practice of acquiring drone-based image data in marine environments. Mar. Freshwater Res. 2018, 70, 952–963. [Google Scholar] [CrossRef]
- Jung, S.; Kim, W. Development of an unmanned aerial system for maritime environmental observation. IEEE Access 2021, 9, 132746–132765. [Google Scholar] [CrossRef]
- Muslim, A.M.; Chong, W.S.; Safuan, C.D.M.; Khalil, I.; Hossain, M.S. Coral reef mapping of UAV: A comparison of sun glint correction methods. Remote Sens. 2019, 11, 2422. [Google Scholar] [CrossRef]
- Tiškus, E.; Bučas, M.; Vaičiūtė, D.; Gintauskas, J.; Babrauskienė, I. An Evaluation of Sun-Glint Correction Methods for UAV-Derived Secchi Depth Estimations in Inland Water Bodies. Drones 2023, 7, 546. [Google Scholar] [CrossRef]
- Ottaviani, M.; Spurr, R.; Stamnes, K.; Li, W.; Su, W.; Wiscombe, W. Improving the description of sunglint for accurate prediction of remotely sensed radiances. J. Quant. Spectrosc. Radiat. Transf. 2008, 109, 2364–2375. [Google Scholar] [CrossRef]
- Hochberg, E.J.; Andréfouët, S.; Tyler, M.R. Sea surface correction of high spatial resolution Ikonos images to improve bottom mapping in near-shore environments. IEEE Trans. Geosci. Remote Sens. 2003, 41, 1724–1729. [Google Scholar] [CrossRef]
- Hedley, J.D.; Harborne, A.R.; Mumby, P.J. Simple and robust removal of sun glint for mapping shallow-water benthos. Int. J. Remote Sens. 2005, 26, 2107–2112. [Google Scholar] [CrossRef]
- Goodman, J.A.; Lee, Z.; Ustin, S.L. Influence of atmospheric and sea-surface corrections on retrieval of bottom depth and reflectance using a semi-analytical model: A case study in Kaneohe Bay, Hawaii. Appl. Opt. 2008, 47, F1–F11. [Google Scholar] [CrossRef]
- Kutser, T.; Vahtmäe, E.; Praks, J. A sun glint correction method for hyperspectral imagery containing areas with non-negligible water leaving NIR signal. Remote Sens. Environ. 2009, 113, 2267–2274. [Google Scholar] [CrossRef]
- Hossain, M.S.; Bujang, J.S.; Zakaria, M.H.; Hashim, M. The application of remote sensing to seagrass ecosystems: An overview and future research prospects. Int. J. Remote Sens. 2015, 36, 61–114. [Google Scholar] [CrossRef]
- Kutser, T.; Jupp, D.L. On the possibility of mapping living corals to the species level based on their optical signatures. Estuar. Coast. Shelf Sci. 2006, 69, 607–614. [Google Scholar] [CrossRef]
- Mumby, P.J.; Skirving, W.; Strong, A.E.; Hardy, J.T.; LeDrew, E.F.; Hochberg, E.J.; David, L.T. Remote sensing of coral reefs and their physical environment. Mar. Pollut. Bull. 2004, 48, 219–228. [Google Scholar] [CrossRef]
- Vahtmäe, E.; Kutser, T.; Martin, G.; Kotta, J. Feasibility of hyperspectral remote sensing for mapping benthic macroalgal cover in turbid coastal waters—A Baltic Sea case study. Remote Sens. Environ. 2006, 101, 342–351. [Google Scholar] [CrossRef]
- Partama, I.G.Y.; Kanno, A.; Ueda, M.; Akamatsu, Y.; Inui, R.; Sekine, M.; Higuchi, T. Removal of water-surface reflection effects with a temporal minimum filter for UAV-based shallow-water photogrammetry. Earth Surf. Process. Landf. 2018, 43, 2673–2682. [Google Scholar] [CrossRef]
- Giles, A.B.; Davies, J.E.; Ren, K.; Kelaher, B. A deep learning algorithm to detect and classify sun glint from high-resolution aerial imagery over shallow marine environments. ISPRS J. Photogramm. Remote Sens. 2021, 181, 20–26. [Google Scholar] [CrossRef]
- Qin, J.; Li, M.; Zhao, J.; Li, D.; Zhang, H.; Zhong, J. Advancing sun glint correction in high-resolution marine UAV RGB imagery for coral reef monitoring. ISPRS J. Photogramm. Remote Sens. 2024, 207, 298–311. [Google Scholar] [CrossRef]
- Schläpfer, D.; Popp, C.; Richter, R. Drone data atmospheric correction concept for multi-and hyperspectral imagery–the DROACOR model. The International Archives of the Photogrammetry. ISPRS Ann. Photogramm. Remote Sens. Spatial Inf. Sci. 2020, 43, 473–478. [Google Scholar]
- Jenerowicz, A.; Wierzbicki, D.; Kedzierski, M. Radiometric Correction with Topography Influence of Multispectral Imagery Obtained from Unmanned Aerial Vehicles. Remote Sens. 2023, 15, 2059. [Google Scholar] [CrossRef]
- Lee, J.S.; Baek, J.Y.; Jung, D.; Shim, J.S.; Lim, H.S.; Jo, Y.H. Estimate of coastal water depth based on aerial photographs using a low-altitude remote sensing system. Ocean Sci. J. 2019, 54, 349–362. [Google Scholar] [CrossRef]
- Windle, A.E.; Silsbe, G.M. Evaluation of unoccupied aircraft system (UAS) remote sensing reflectance retrievals for water quality monitoring in coastal waters. Front. Environ. Sci. 2021, 9, 674247. [Google Scholar] [CrossRef]
- Chen, J.; Xiao, Y.; Guo, Y.; Li, M.; Li, X.; Zhang, X.; Fu, Y. Detecting sun glint in UAV RGB images at different times using a deep learning algorithm. Ecol. Inf. 2024, 81, 102660. [Google Scholar] [CrossRef]
- Thirumalaisamy, M.R.; Ansell, P.J. Fast and adaptive empirical mode decomposition for multidimensional, multivariate signals. IEEE Signal Process. Lett. 2018, 25, 1550–1554. [Google Scholar] [CrossRef]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.C.; Shih, H.H.; Zheng, Q.; Liu, H.H. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis. Proc. R. Soc. Lond. A Math. Phys. Eng. Sci. 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Kim, W.; Roh, S.H.; Moon, Y.; Jung, S. Evaluation of Rededge-M camera for water color observation after Image preprocessing. Journal of the Korean Society of Surveying, Geodesy. Photogramm. Cartogr. 2019, 37, 167–175. [Google Scholar]
- Lee, Z.; Pahlevan, N.; Ahn, Y.H.; Greb, S.; O’Donnell, D. Robust approach to directly measuring water-leaving radiance in the field. Appl. Opt. 2013, 52, 1693–1701. [Google Scholar] [CrossRef]
- Lee, Z.; Wei, J.; Shang, Z.; Garcia, R.; Dierssen, H.M.; Ishizaka, J.; Castagna, A. On-water radiometry measurements: Skylight-blocked approach and data processing. IOCCG Ocean Opt. Biogeochem. Protocols Sat. Ocean Colour Sens. Valid. 2019, 3, 7. [Google Scholar]
- Shang, Z.; Lee, Z.; Dong, Q.; Wei, J. Self-shading associated with a skylight-blocked approach system for the measurement of water-leaving radiance and its correction. Appl. Opt. 2017, 56, 7033–7040. [Google Scholar] [CrossRef]
- Gray, P.C.; Windle, A.E.; Dale, J.; Savelyev, I.B.; Johnson, Z.I.; Silsbe, G.M.; Johnston, D.W. Robust ocean color from drones: Viewing geometry, sky reflection removal, uncertainty analysis, and a survey of the Gulf Stream front. Limnol. Oceanogr. Methods 2022, 20, 656–673. [Google Scholar] [CrossRef]
- Pedroso Curtarelli, V.; Clemente Faria Barbosa, C.; Andrade Maciel, D.; Flores Júnior, R.; Menino Carlos, F.; de Moraes Novo, E.M.L.; da Silva, E.F.F. Diffuse attenuation of clear water tropical reservoir: A remote sensing semi-analytical approach. Res. 2020, 12, 2828. [Google Scholar] [CrossRef]
- Min, J.E.; Ryu, J.H.; Ahn, Y.H.; Lee, K.S. Development of the diffuse attenuation coefficient for down-welling irradiance (Kd) algorithm around the Korean Sea. Korean Soc. Remote Sens. 2007, 204–209. Available online: https://koreascience.kr/article/CFKO200727465742553.do (accessed on 25 February 2025).




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Study Area 1 | Study Area 2 | |
|---|---|---|
| Location | Song-Jeong Beach | Jang-Heong |
| Date of observation | 10 May 2024 | 5 September 2024 |
| Time of day | 12:49 p.m.–13:04 p.m. | 12:11 p.m.–12:25 p.m. |
| Temporal resolution | 1 pixel/s | 1 pixel/s |
| Spatial resolution | 31 cm/pixel | 42 cm/pixel |
| Image size | 960 × 1280 | 960 × 1280 |
| UAV altitude | 50 m | 120 m |
| Sky conditions | Clear sky | Clear sky |
| Bottom characteristics | Mudflat | Sandy beach |
| Seawater properties | Clear water | High turbidity |
| UAV geometry | Zenith: 45°, Azimuth: 135° (from the sun) | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, J.-S.; Kim, S.-Y.; Jo, Y.-H. A Novel Method for Eliminating Glint in Water-Leaving Radiance from UAV Multispectral Imagery. Remote Sens. 2025, 17, 996. https://doi.org/10.3390/rs17060996
Lee J-S, Kim S-Y, Jo Y-H. A Novel Method for Eliminating Glint in Water-Leaving Radiance from UAV Multispectral Imagery. Remote Sensing. 2025; 17(6):996. https://doi.org/10.3390/rs17060996
Chicago/Turabian StyleLee, Jong-Seok, Sin-Young Kim, and Young-Heon Jo. 2025. "A Novel Method for Eliminating Glint in Water-Leaving Radiance from UAV Multispectral Imagery" Remote Sensing 17, no. 6: 996. https://doi.org/10.3390/rs17060996
APA StyleLee, J.-S., Kim, S.-Y., & Jo, Y.-H. (2025). A Novel Method for Eliminating Glint in Water-Leaving Radiance from UAV Multispectral Imagery. Remote Sensing, 17(6), 996. https://doi.org/10.3390/rs17060996