
Enhancing the Communication Bandwidth of FH-MIMO DFRC Systems Through Constellation Rotation Modulation


Abstract
1. Introduction
2. Modulation and Demodulation Principles
2.1. QAM-FHCS-MIMO DFRC Signal Model
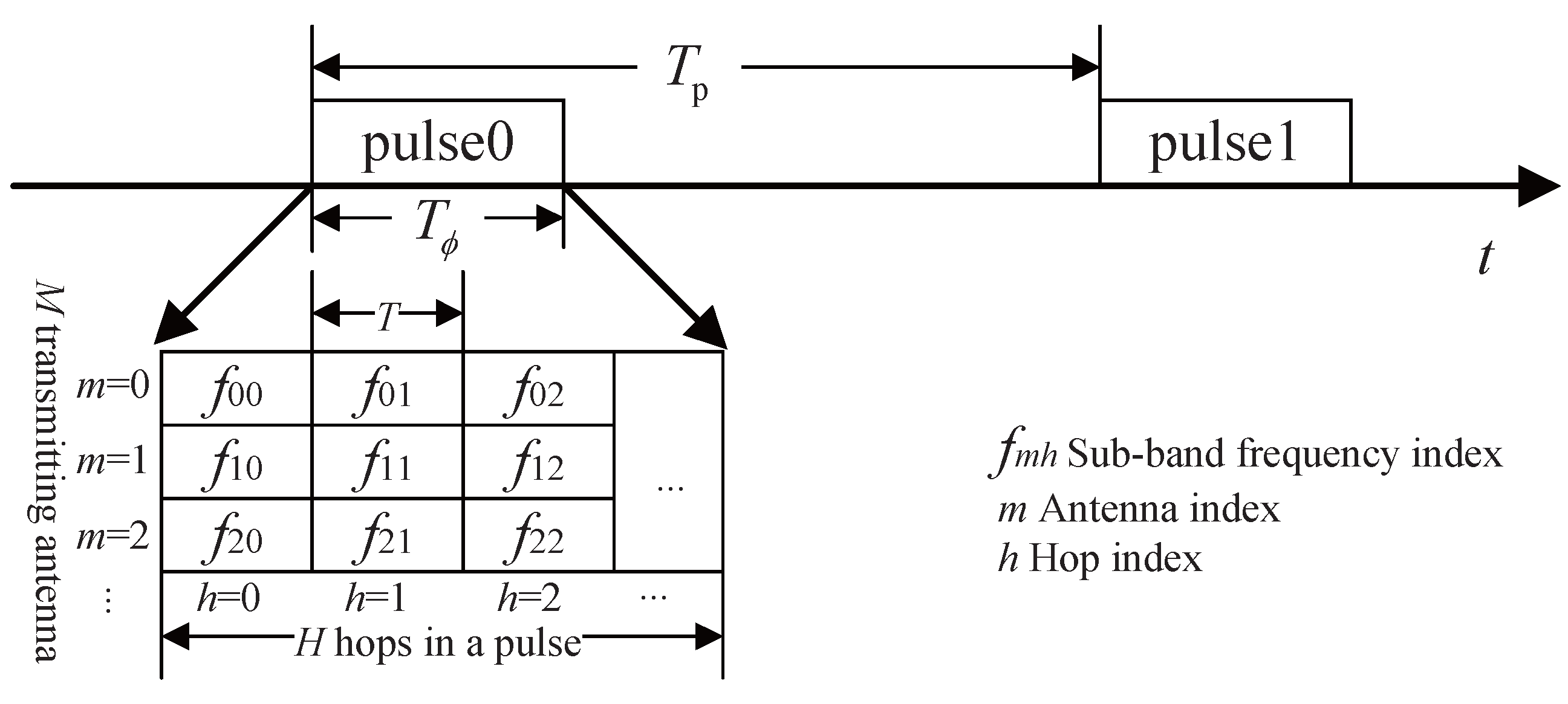
2.1.1. FH-MIMO Radar
2.1.2. FHCS-MIMO DFRC
2.1.3. QAM-FHCS-MIMO DFRC
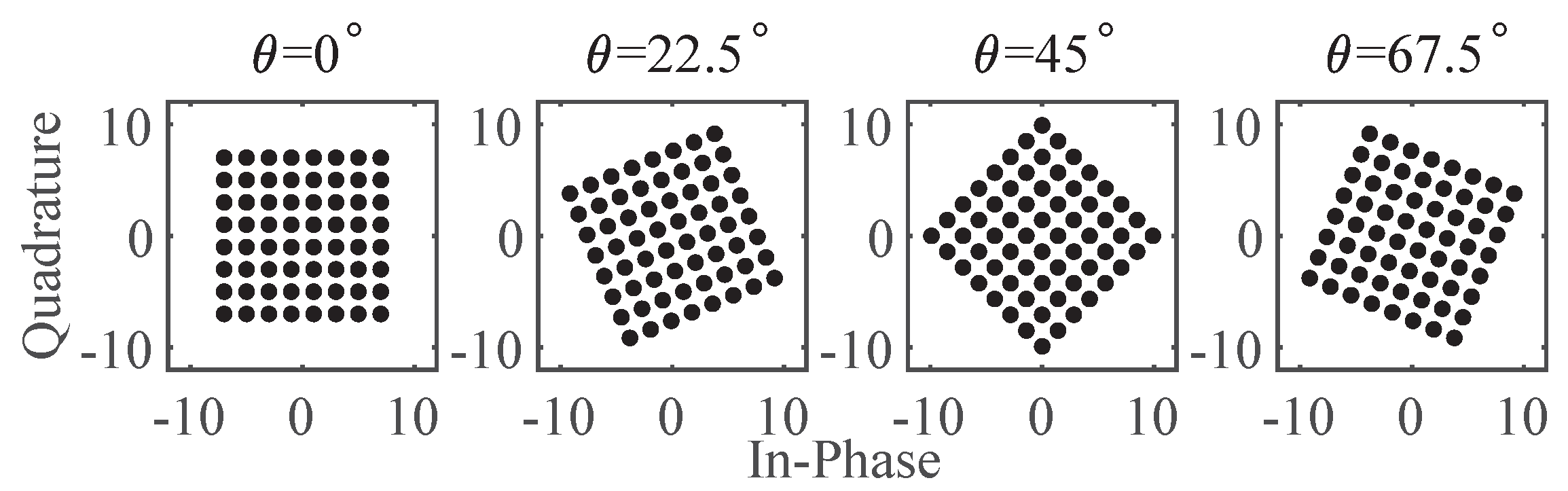
2.2. CRM Principles
2.3. Principles of Demodulation
2.3.1. FHCS Demodulation
2.3.2. CRM Demodulation
2.3.3. QAM Demodulation
2.4. Low-Complexity Fast CRM Demodulation
3. Radar Performance Analysis
3.1. Detection Capability
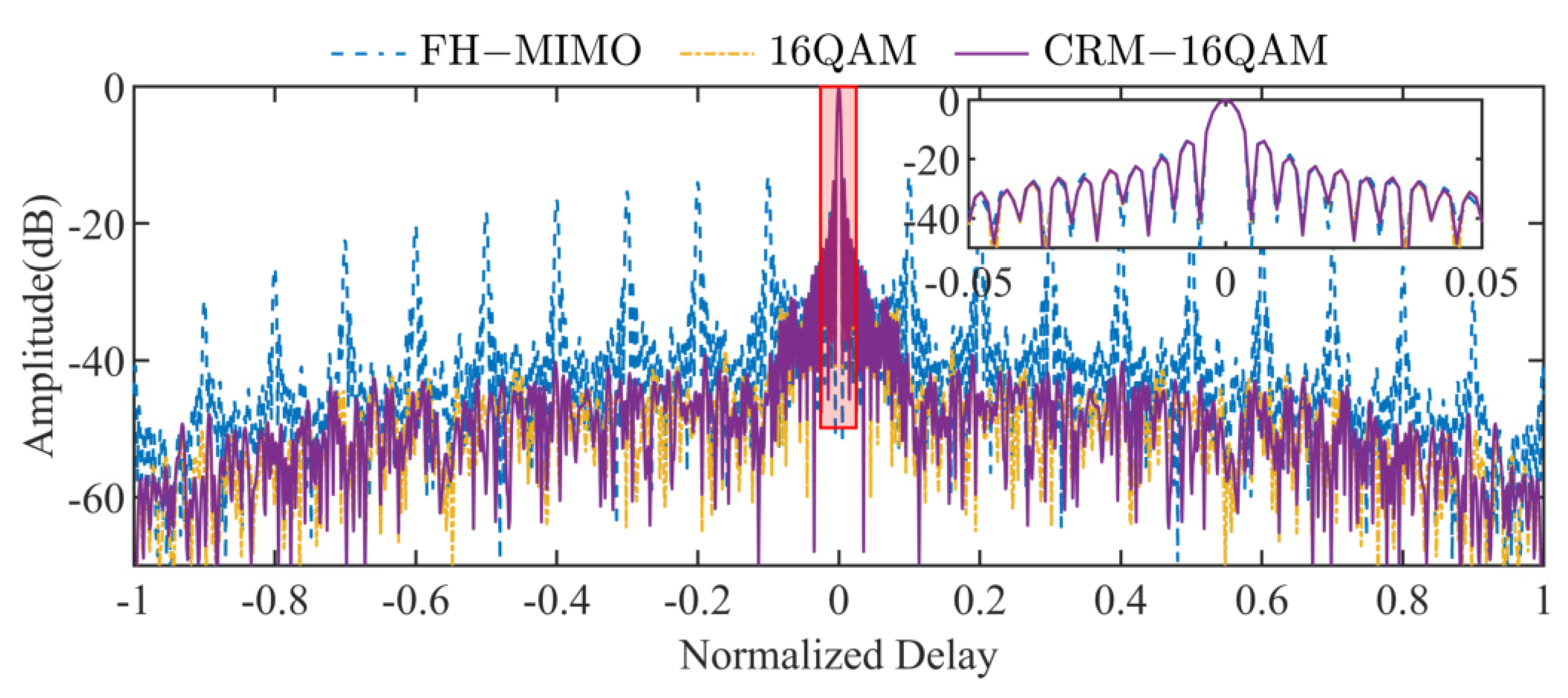
3.2. Ambiguity Function
4. Communication Performance Analysis
4.1. The Effect of CRM Order on Demodulation Performance
4.2. The Impact of Sample Size on CRM
5. Simulation Analysis
5.1. Radar System Simulation
5.2. Communication System Simulation
5.2.1. Performance Comparison of Demodulation Methods
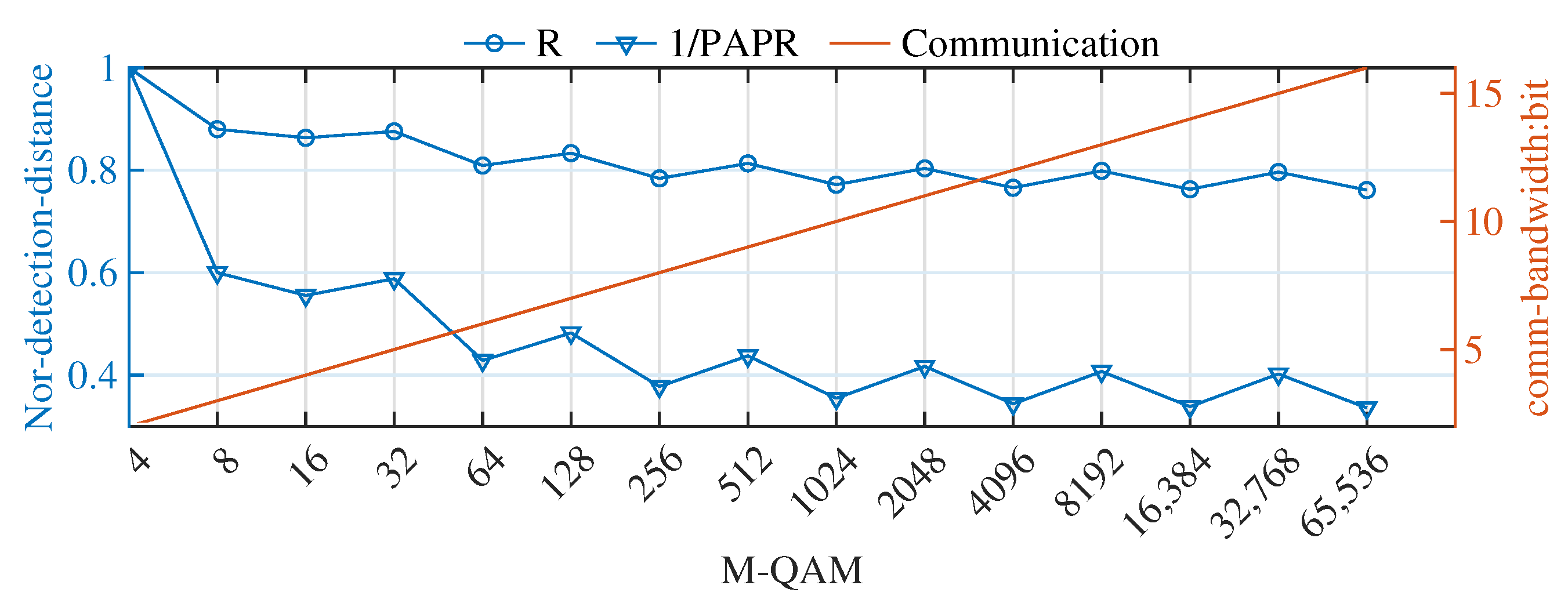
5.2.2. Analysis of Communication Rate
6. CRM DFRC Communication Modulation Experiment
7. Conclusions
- -
- Systematically derived the principle of CRM information embedding, proposed a fast demodulation method based on constellation diagram folding and a demodulation method using the traditional least squares method, and compared their computational complexities and performance differences;
- -
- Analyzed the impact of the proposed method on radar performance from two perspectives: detection capability and ambiguity function performance. System simulation experiments demonstrated that the impact of CRM on radar performance is negligible;
- -
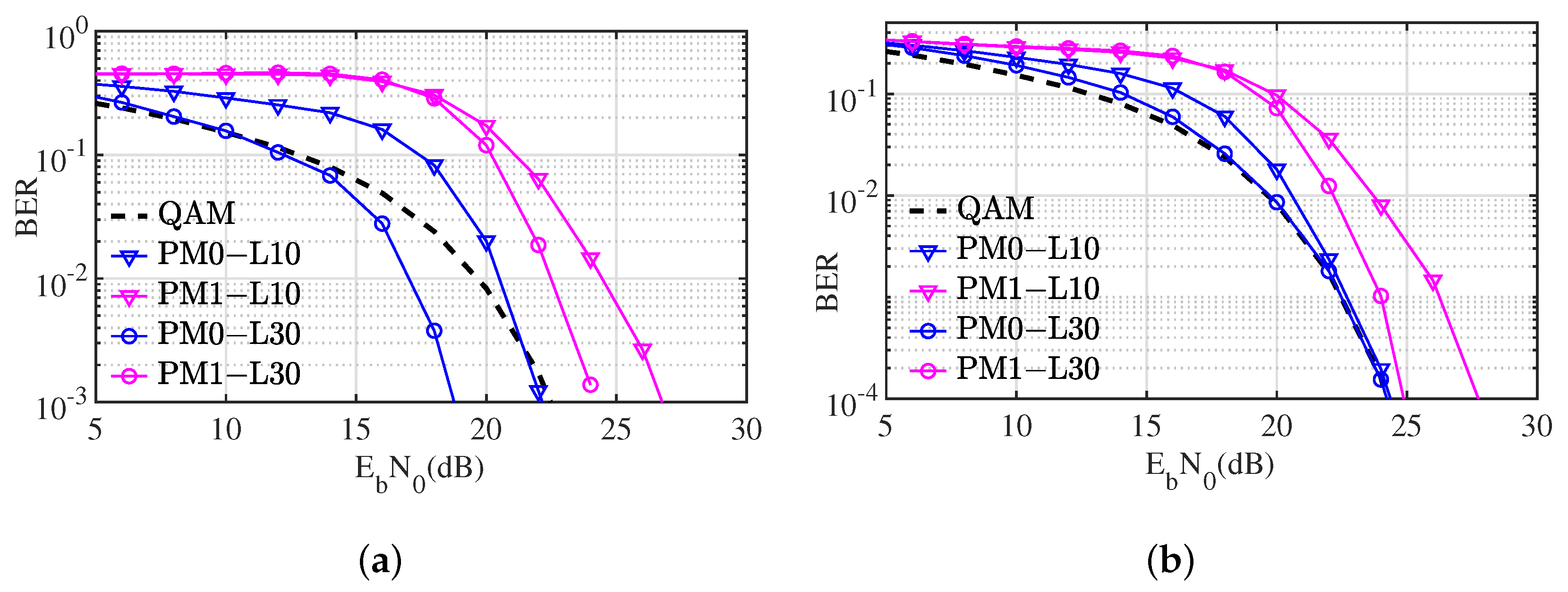
- Evaluated the theoretical performance of the proposed demodulation methods using BER curves. Simulation analyses confirmed that the method has a minimal impact on the demodulation performance in other dimensions;
- -
- Tested the CRM modulation and demodulation performance on an SDR experimental platform, verifying the feasibility of the proposed method;
- -
- Through simulation analyses and experimental validations, analyzed the CRM demodulation performance under different modulation orders, confirming the reliability of the proposed method.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Wang, X.; Fei, Z.; Zhang, J.A.; Huang, J.; Yuan, J. Constrained Utility Maximization in Dual-Functional Radar-Communication Multi-UAV Networks. IEEE Trans. Commun. 2021, 69, 2660–2672. [Google Scholar] [CrossRef]
- Wymeersch, H.; Seco-Granados, G.; Destino, G.; Dardari, D.; Tufvesson, F. 5G mmWave positioning for vehicular networks. IEEE Wirel. Commun. 2017, 24, 80–86. [Google Scholar] [CrossRef]
- Yang, C.; Shao, H.R. WiFi-based indoor positioning. IEEE Commun. Mag. 2015, 53, 150–157. [Google Scholar] [CrossRef]
- Liu, R.; Li, M.; Liu, Q.; Swindlehurst, A.L. Joint waveform and filter designs for STAP-SLP-based MIMO-DFRC systems. IEEE J. Sel. Areas Commun. 2022, 40, 1918–1931. [Google Scholar] [CrossRef]
- Chen, L.; Qin, X.; Chen, Y.; Zhao, N. Joint waveform and clustering design for coordinated multi-point DFRC systems. IEEE Trans. Commun. 2023, 71, 1323–1335. [Google Scholar] [CrossRef]
- Wu, K.; Zhang, J.A.; Huang, X.; Guo, Y.J.; Yuan, J. Reliable Frequency-Hopping MIMO Radar-Based Communications with Multi-Antenna Receiver. IEEE Trans. Commun. 2021, 69, 5502–5513. [Google Scholar] [CrossRef]
- Hassanien, A.; Amin, M.G.; Aboutanios, E.; Himed, B. Dual-Function Radar Communication Systems: A Solution to the Spectrum Congestion Problem. IEEE Signal Process. Mag. 2019, 36, 115–126. [Google Scholar] [CrossRef]
- Hassanien, A.; Amin, M.G.; Zhang, Y.D.; Ahmad, F. Dual-Function Radar-Communications: Information Embedding Using Sidelobe Control and Waveform Diversity. IEEE Trans. Signal Process. 2016, 64, 2168–2181. [Google Scholar] [CrossRef]
- Wang, X.; Hassanien, A.; Amin, M.G. Dual-Function MIMO Radar Communications System Design Via Sparse Array Optimization. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 1213–1226. [Google Scholar] [CrossRef]
- Tedesso, T.W.; Romero, R. Code shift keying based joint radar and communications for EMCON applications. Digit. Signal Process. 2018, 80, 48–56. [Google Scholar] [CrossRef]
- Hassanien, A.; Aboutanios, E.; Amin, M.G.; Fabrizio, G.A. A dual-function MIMO radar-communication system via waveform permutation. Digit. Signal Process. 2018, 83, 118–128. [Google Scholar] [CrossRef]
- Wu, K.; Zhang, J.A.; Huang, X.; Guo, Y.J. Frequency-hopping MIMO radar-based communications: An overview. IEEE Aerosp. Electron. Syst. Mag. 2021, 37, 42–54. [Google Scholar] [CrossRef]
- Wang, X.; Hassanien, A. Phase Modulated Communications Embedded in Correlated FH-MIMO Radar Waveforms. In Proceedings of the 2020 IEEE Radar Conference (RadarConf20), Florence, Italy, 21–25 September 2020; pp. 1–6. [Google Scholar]
- Eedara, I.P.; Amin, M.G.; Hassanien, A. Analysis of Communication Symbol Embedding in FH MIMO Radar Platforms. In Proceedings of the 2019 IEEE Radar Conference (RadarConf), Boston, MA, USA, 22–26 April 2019; pp. 1–6. [Google Scholar]
- Eedara, I.P.; Amin, M.G.; Hassanien, A. Controlling Clutter Modulation in Frequency Hopping MIMO Dual-Function Radar Communication Systems. In Proceedings of the 2020 IEEE International Radar Conference (RADAR), Washington, DC, USA, 28–30 April 2020; pp. 466–471. [Google Scholar]
- Yao, X.; Yang, Z.; Qiu, H.; Yu, X.; Cui, G.; Qi, H. DFRC signal design with hybrid index modulation. IEEE Sensors J. 2024, 24, 20855–20867. [Google Scholar] [CrossRef]
- Ma, D.; Shlezinger, N.; Huang, T.; Shavit, Y.; Namer, M.; Liu, Y.; Eldar, Y.C. Spatial modulation for joint radar-communications systems: Design, analysis, and hardware prototype. IEEE Trans. Veh. Technol. 2021, 70, 2283–2298. [Google Scholar] [CrossRef]
- Baxter, W.; Aboutanios, E.; Hassanien, A. Joint radar and communications for frequency-hopped MIMO systems. IEEE Trans. Signal Process. 2022, 70, 729–742. [Google Scholar] [CrossRef]
- Eedara, I.P.; Amin, M.G. Dual Function FH MIMO Radar System with DPSK Signal Embedding. In Proceedings of the 2019 27th European Signal Processing Conference (EUSIPCO), A Coruna, Spain, 2–6 September 2019; pp. 1–5. [Google Scholar]
- Hassanien, A.; Himed, B.; Rigling, B.D. A Dual-Function MIMO Radar-Communications System Using Frequency-Hopping Waveforms. In Proceedings of the 2017 IEEE Radar Conference (RadarConf), Seattle, WA, USA, 8–12 May 2017; pp. 1721–1725. [Google Scholar]
- Baxter, W.; Aboutanios, E.; Hassanien, A. Dual-Function MIMO Radar-Communications Via Frequency-Hopping Code Selection. In Proceedings of the 2018 52nd Asilomar Conference on Signals, Systems, and Computers, Pacific Grove, CA, USA, 28–31 October 2018; pp. 1126–1130. [Google Scholar]
- Qiu, F.; Zhao, M.M.; Li, L.; Zhao, M.J. Improved information embedding for frequency hopping-based mimo dfrc system. IEEE Wirel. Commun. Lett. 2022, 12, 346–350. [Google Scholar] [CrossRef]
- Castillo-Soria, F.; Cortez, J.; Gutiérrez, C.; Luna-Rivera, M.; Garcia-Barrientos, A. Extended quadrature spatial modulation for MIMO wireless communications. Phys. Commun. 2019, 32, 88–95. [Google Scholar] [CrossRef]
- Wang, X.; Xu, J.; Hassanien, A.; Aboutanios, E. Joint Communications with FH-MIMO Radar Systems: An Extended Signaling Strategy. In Proceedings of the ICASSP 2021-2021 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Toronto, ON, Canada, 6–11 June 2021; pp. 8253–8257. [Google Scholar]
- Eedara, I.P.; Hassanien, A.; Amin, M.G.; Rigling, B.D. Ambiguity Function Analysis for Dual-Function Radar Communications Using PSK Signaling. In Proceedings of the 2018 52nd Asilomar Conference on Signals, Systems, and Computers, Pacific Grove, CA, USA, 28–31 October 2018; pp. 900–904. [Google Scholar]
- Wu, K.; Zhang, J.A.; Huang, X.; Guo, Y.J.; Heath, R.W. Waveform Design and Accurate Channel Estimation for Frequency-Hopping MIMO Radar-Based Communications. IEEE Trans. Commun. 2021, 69, 1244–1258. [Google Scholar] [CrossRef]
- Wu, K.; Andrew Zhang, J.; Huang, X.; Jay Guo, Y. Integrating Secure Communications into Frequency Hopping MIMO Radar with Improved Data Rate. IEEE Trans. Wirel. Commun. 2022, 21, 5392–5405. [Google Scholar] [CrossRef]
- Dash, S.S.; Pythoud, F.; Baeuerle, B.; Josten, A.; Leuchtmann, P.; Hillerkuss, D.; Leuthold, J. Approaching the Shannon Limit Through Constellation Modulation. In Proceedings of the 2016 Optical Fiber Communications Conference and Exhibition (OFC), Anaheim, CA, USA, 20–24 March 2016; pp. 1–3. [Google Scholar]
- Zhao, Y.; Hu, J.; Ding, Z.; Yang, K. Constellation Rotation Aided Modulation Design for the Multi-User SWIPT-NOMA. In Proceedings of the 2018 IEEE International Conference on Communications (ICC), Kansas City, MO, USA, 20–24 May 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Gozávez, D.; Giménez, J.J.; Gómez-Barquero, D.; Cardona, N. Rotated Constellations for Improved Time and Frequency Diversity in DVB-NGH. IEEE Trans. Broadcast. 2013, 59, 298–305. [Google Scholar] [CrossRef]
- Tan, M.; Chen, W. Performance Comparison and Analysis of PSK and QAM. In Proceedings of the 2011 7th International Conference on Wireless Communications, Networking and Mobile Computing, Wuhan, China, 23–25 September 2011; pp. 1–4. [Google Scholar] [CrossRef]
- Liu, J.; Wu, K.; Su, T.; Zhang, J.A. Practical frequency-hopping MIMO joint radar communications: Design and experiment. Digit. Commun. Networks 2024, 10, 1904–1914. [Google Scholar] [CrossRef]
- Kang, E.W. Radar System Analysis, Design, and Simulation; Artech House: Washington, DC, USA, 2008. [Google Scholar]
- Khan, W.; Qureshi, I.M.; Sultan, K. Ambiguity function of phased–MIMO radar with colocated antennas and its properties. IEEE Geosci. Remote Sens. Lett. 2013, 11, 1220–1224. [Google Scholar] [CrossRef]
- Madisetti, V.K.; Young, I.T. The Digital Signal Processing Handbook-3 Volume Set; CRC Press: Boca Raton, FL, USA, 2018. [Google Scholar]
- Chang, S.; Deng, Y.; Zhang, Y.; Zhao, Q.; Wang, R.; Zhang, K. An advanced scheme for range ambiguity suppression of spaceborne SAR based on blind source separation. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5230112. [Google Scholar] [CrossRef]
- Soriano, C.G. Review of Radar Detectors With Constant False Alarm Rate. Telemática 2020, 19, 78–90. [Google Scholar]
- Tran, T.N.; Drab, K.; Daszykowski, M. Revised DBSCAN algorithm to cluster data with dense adjacent clusters. Chemom. Intell. Lab. Syst. 2013, 120, 92–96. [Google Scholar] [CrossRef]
- MathWorks. Help Center. Available online: https://www.mathworks.com/help/pdf_doc/supportpkg/xilinxzynqbasedradio/xilinxzynqbasedradio_ug.pdf (accessed on 9 January 2024).








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Step | Traditional Method | Folding Method |
|---|---|---|
| Calculating Euclidean Distance | ||
| Finding the Minimum Value | ||
| Accumulating Euclidean Distances | ||
| Sorting |
| Variable | Parameter | Value |
|---|---|---|
| Center Frequency [GHz] | ||
| M | Number of Transmitting Antennas [-] | 2 |
| N | Number of Receiving Antennas [-] | 12 |
| B | Signal Bandwidth [MHz] | 20 |
| Radar Sub-carrier Frequency [MHz] | −10:1:9 | |
| T | Sub-Hop Period [s] | 1 |
| H | Number of Sub-Hops per Radar Pulse [-] | 5 |
| Pulse Repetition Period [s] | 40 | |
| Number of PRTs in Coherent Processing Interval (CPI) [-] | 256 | |
| Sampling Frequency [MHz] | 40 | |
| Number of Samples per PRT () [-] | 1600 | |
| Y | CRM Symbol Angles [] | |
| L | Number of CRM Symbol Samples [-] | 10 |
| Variable | Function Description | Value |
|---|---|---|
| CFAR Guard Cell [-] | 2 | |
| CFAR Training Cell [-] | 6 | |
| Number of Simulated Targets per Trial [-] | 50 | |
| Signal-to-Noise Ratio (SNR) in [dB] | [−40:1:−25] | |
| Number of Monte Carlo Trials [-] | 100 |
| Modulation Method | Data Rate (bit/s) |
|---|---|
| FHCS-MIMO | |
| QAM-FHCS-MIMO | |
| CRM-QAM-FHCS-MIMO | |
| OFDM |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, J.; Jiang, W.; Yang, W.; Su, T.; Chen, J. Enhancing the Communication Bandwidth of FH-MIMO DFRC Systems Through Constellation Rotation Modulation. Remote Sens. 2025, 17, 1058. https://doi.org/10.3390/rs17061058
Liu J, Jiang W, Yang W, Su T, Chen J. Enhancing the Communication Bandwidth of FH-MIMO DFRC Systems Through Constellation Rotation Modulation. Remote Sensing. 2025; 17(6):1058. https://doi.org/10.3390/rs17061058
Chicago/Turabian StyleLiu, Jiangtao, Weibin Jiang, Wentie Yang, Tao Su, and Jianzhong Chen. 2025. "Enhancing the Communication Bandwidth of FH-MIMO DFRC Systems Through Constellation Rotation Modulation" Remote Sensing 17, no. 6: 1058. https://doi.org/10.3390/rs17061058
APA StyleLiu, J., Jiang, W., Yang, W., Su, T., & Chen, J. (2025). Enhancing the Communication Bandwidth of FH-MIMO DFRC Systems Through Constellation Rotation Modulation. Remote Sensing, 17(6), 1058. https://doi.org/10.3390/rs17061058