
Combining Global Features and Local Interoperability Optimization Method for Extracting and Connecting Fine Rivers
 ,
,
Abstract
1. Introduction
- (1)
- This paper proposes a preliminary optimization method for linear water bodies combining the Frangi filtering algorithm and an enhanced GA-OTSU threshold segmentation algorithm. Firstly, the Frangi filter is employed to amplify the linear feature responses of rivers. Subsequently, a genetic algorithm (GA) is incorporated into the traditional OTSU thresholding framework to accelerate the optimization process and achieve a more stable, non-linear determination of the optimal segmentation threshold. This approach effectively separates the target water bodies from the background, enabling more comprehensive extraction of riverine linear features.
- (2)
- A depth optimization method for fine rivers has been designed, using the connectivity domain labeling algorithm combined with SSIM structural similarity metrics. First, the river endpoints are identified from the linear feature map, and potential disconnected regions are detected. To assess structural similarity between endpoints, structural similarity index (SSIM) values are computed for the outer rectangular sub-images of these regions. Endpoints exhibiting high structural similarity are subsequently connected, effectively restoring discontinuous river segments and achieving refined optimization of fine-scale river networks.
2. Related Studies
2.1. Water Extraction
2.2. Water Optimization
3. Methodology
3.1. Overall Framework
3.2. Preliminary Optimization
3.2.1. Frangi Filtering to Extract Linear Features
3.2.2. GA-OTSU to Optimize Thresholds
- Digital Coding: The image is coding with pixel gray values ranging from 0 to 255, and 8-bit binary representation.
- Determination of Population Size: The population size represents the total number of individuals in each generation. Typically, it is set to 8, with each category randomly initialized to generate 8 different chromosomes.
- Category Decoding: Decoding each category is the reverse process of the encoding operation. In the GA-OTSU algorithm, the inter-class variance between the target and background in the remote sensing image is used as the key index to evaluate category fitness by the inter-class variance formula, and selection and cumulative probabilities are determined accordingly. Additionally, 8 random numbers are generated for subsequent processing. The larger the variance of the category, the higher its fitness, making it more likely to participate in subsequent genetic operations. This step provides a critical basis for the algorithm to identify the optimal segmentation threshold.
- Genetic Operations: Crossover, selection, and mutation are operated to generate offspring that are closer to the optimal solution. The crossover rate, a key factor in the exchange of information between chromosomes, must be set appropriately. Based on experimental verification, a crossover rate of 80% is typically effective. The mutation operation, which occurs randomly, selects a point on the chromosome and alters it to compensate for any potential information loss during the selection and crossover steps. This ensures the global search ability of the algorithm and helps to effectively obtain the optimal segmentation threshold t.
3.3. Depth Optimization for Succession of Broken Rivers
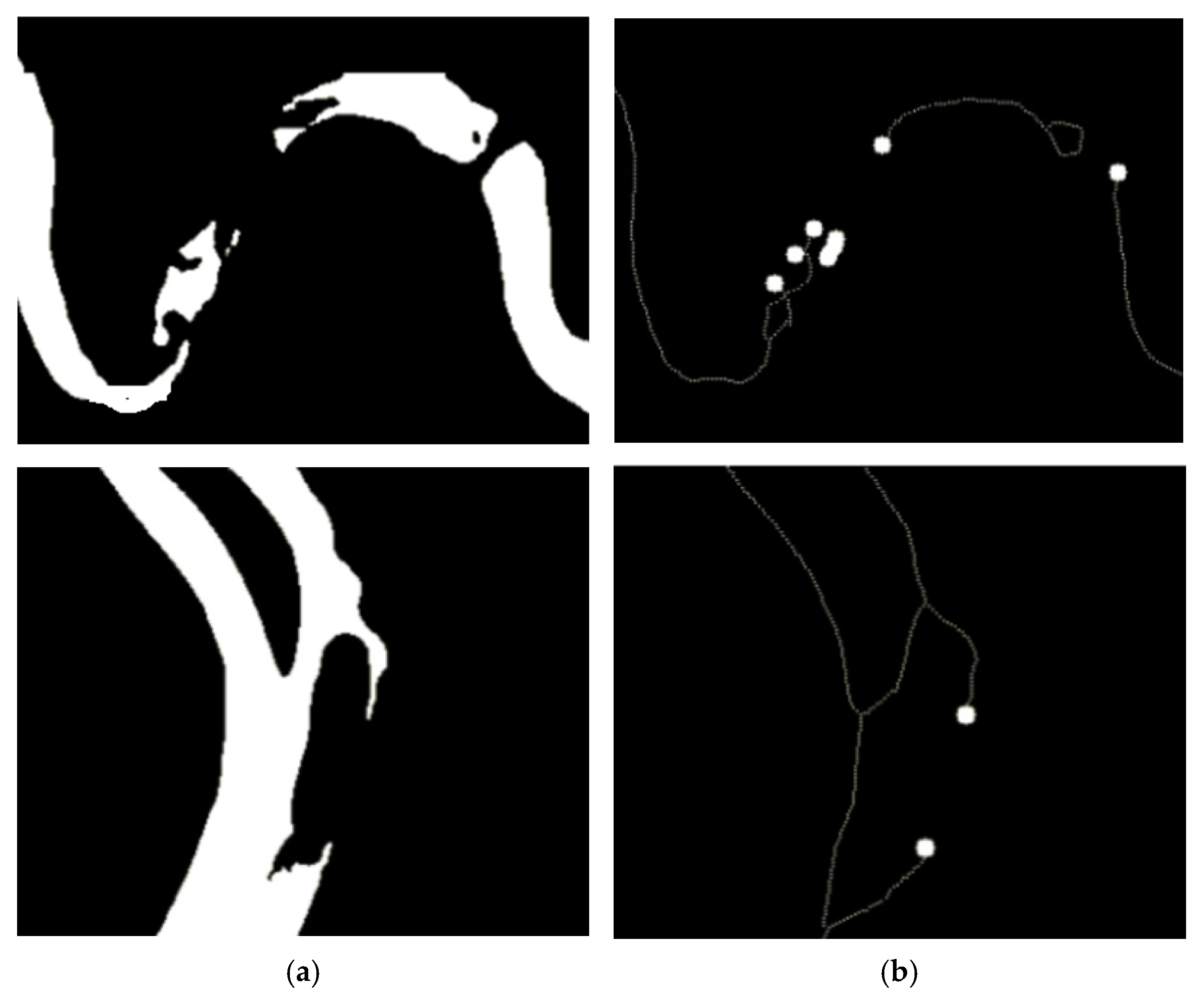
3.3.1. River Skeleton Refinement Extraction
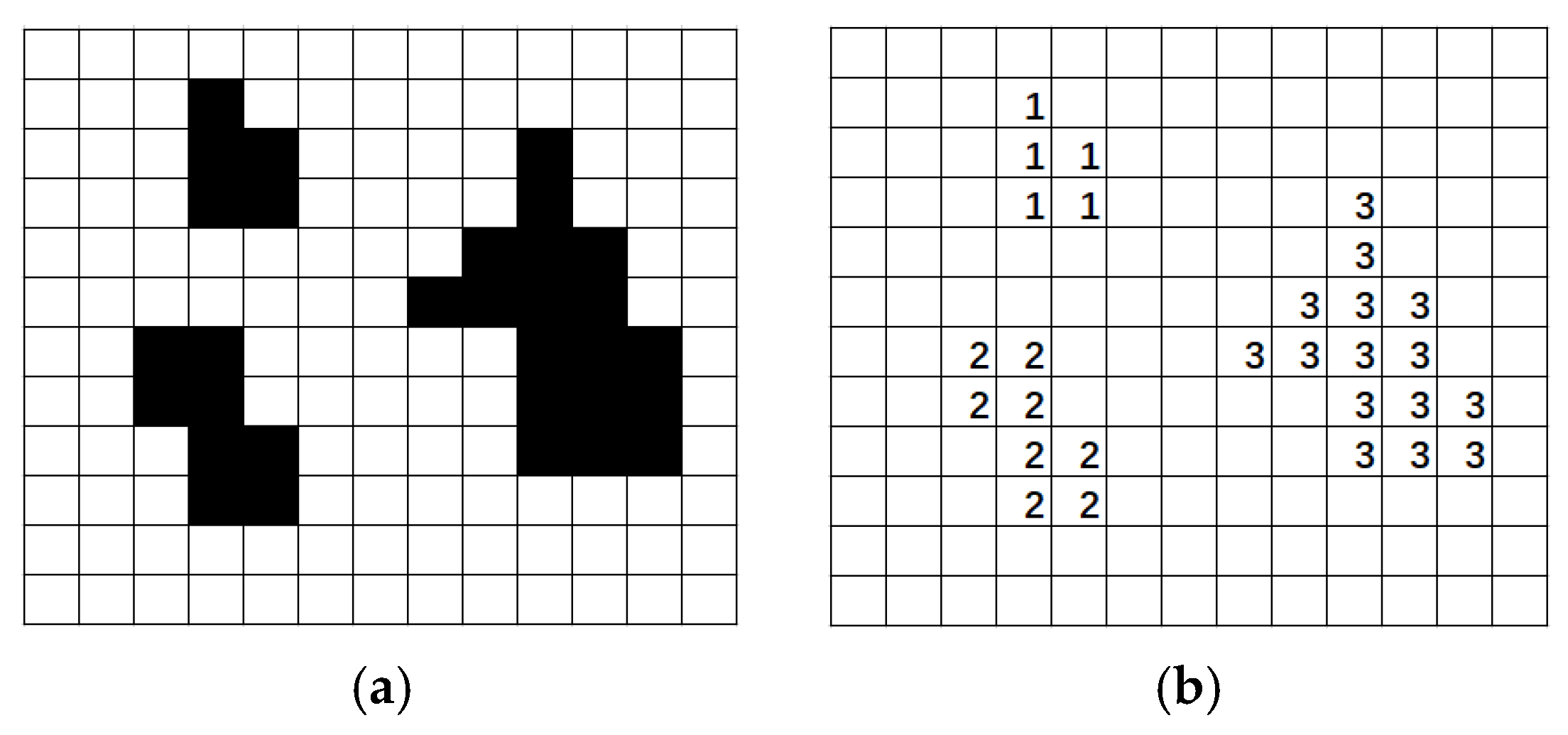
3.3.2. Connected Domain Labeling Based on Depth-First Search (DFS)
3.3.3. Structural Similarity (SSIM) Algorithm
3.4. Nonlinear Water Optimization Based on K-Means Clustering and Spectral–Morphological Joint Inspection
4. Experiment Analysis
4.1. Dataset
4.2. Evaluation Indicators
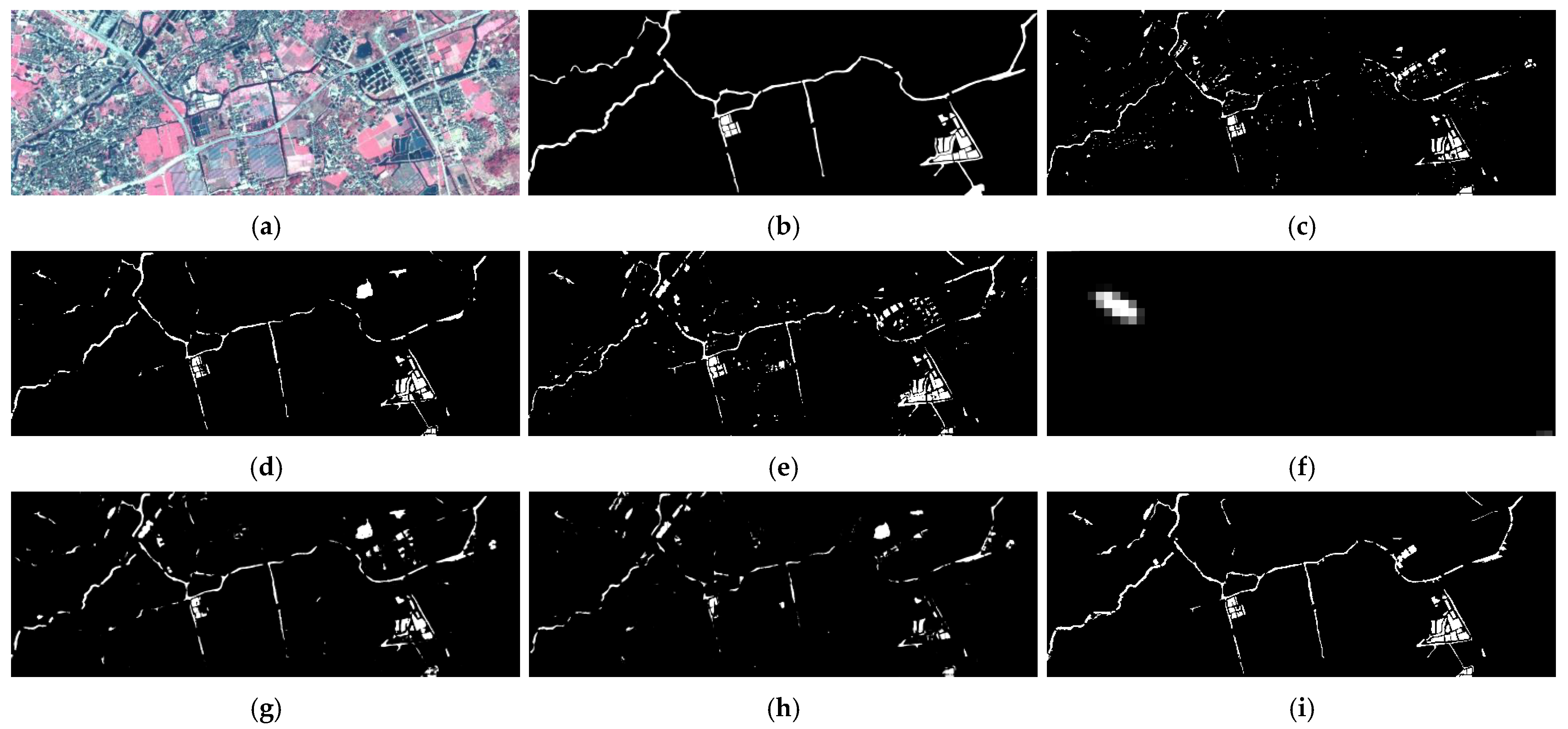
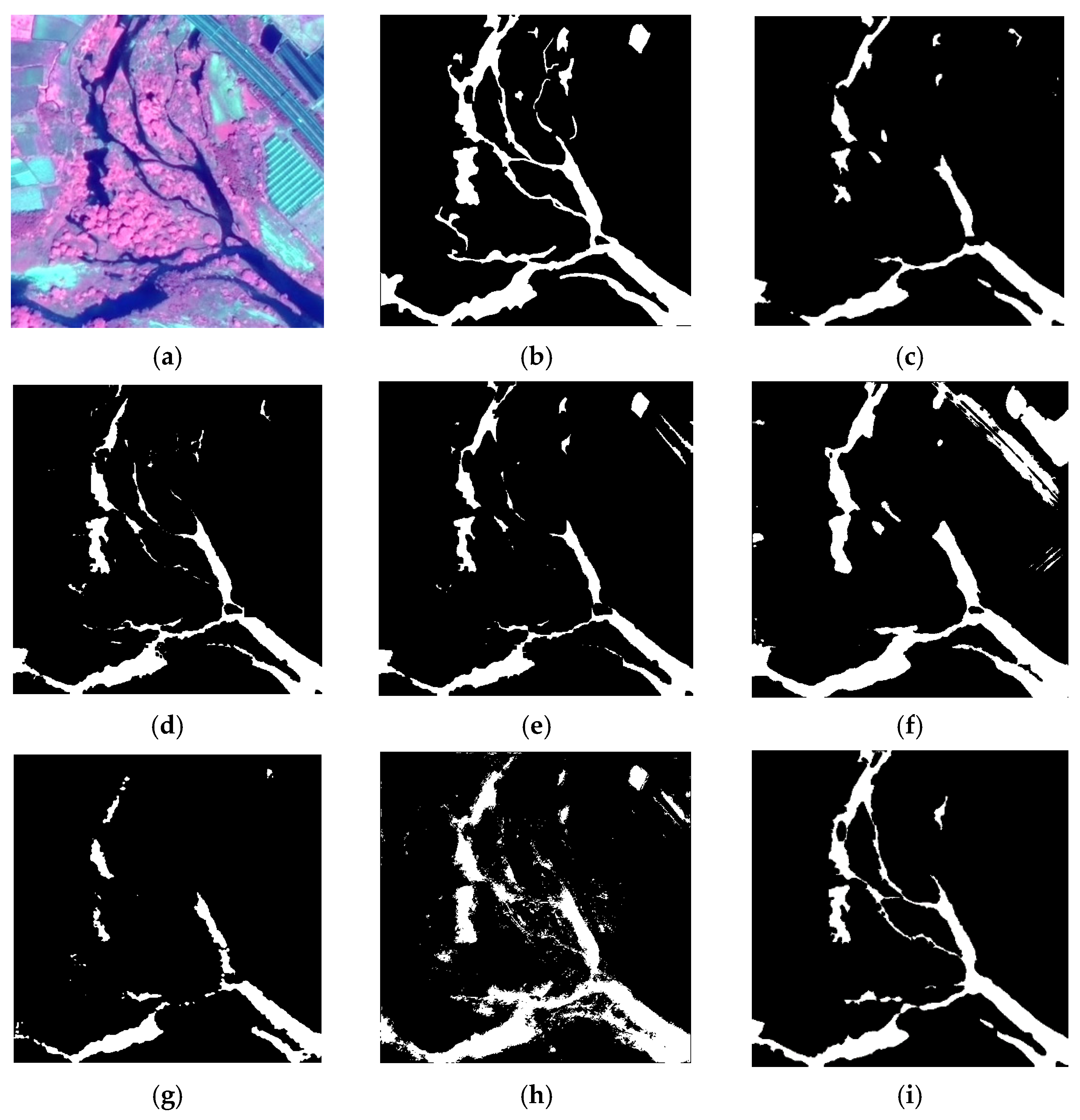
4.3. Comparative Experiment Analysis
4.4. Ablation Experiment
5. Discussion
5.1. Effectiveness Analysis of Preliminary Optimization
5.2. Effectiveness Analysis of Depth Optimization Algorithm
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Yang, D.; Gao, X.; Yang, Y.; Guo, K.; Han, K.; Xu, L. Advances and Future Prospects in Building Extraction from High-Resolution Remote Sensing Images. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2025, 1–25. [Google Scholar] [CrossRef]
- Gao, X.; Zhang, G.; Yang, Y.; Kuang, J.; Han, K.; Jiang, M.; Yang, J.; Tan, M.; Liu, B. Two-Stage Domain Adaptation Based on Image and Feature Levels for Cloud Detection in Cross-Spatiotemporal Domain. IEEE Trans. Geosci. Remote Sens. 2024, 62, 5610517. [Google Scholar] [CrossRef]
- Zhang, G.; Gao, X.; Yang, J.; Yang, Y.; Tan, M.; Xu, J.; Wang, Y. A multi-task driven and reconfigurable network for cloud detection in cloud-snow coexistence regions from very-high-resolution remote sensing images. Int. J. Appl. Earth Obs. Geoinf. 2022, 114, 103070. [Google Scholar] [CrossRef]
- Topp, S.N.; Pavelsky, T.M.; Jensen, D.; Simard, M.; Ross, M.R.V. Research Trends in the Use of Remote Sensing for Inland Water Quality Science: Moving Towards Multidisciplinary Applications. Water 2020, 12, 169. [Google Scholar] [CrossRef]
- Liu, Z.; Gao, X.; Yang, Y.; Xu, L.; Wang, S.; Chen, N.; Wang, Z.; Kou, Y. EDT-Net: A Lightweight Tunnel Water Leakage Detection Network Based on LiDAR Point Clouds Intensity Images. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2025, 1–13. [Google Scholar] [CrossRef]
- Xu, T.; Gao, X.; Yang, Y.; Xu, L.; Xu, J.; Wang, Y. Construction of a Semantic Segmentation Network for the Overhead Catenary System Point Cloud Based on Multi-Scale Feature Fusion. Remote Sens. 2022, 14, 2768. [Google Scholar] [CrossRef]
- Cracknell, A.P. The development of remote sensing in the last 40 years. Int. J. Remote Sens. 2018, 39, 8387–8427. [Google Scholar] [CrossRef]
- Yang, C.; Wei, Y.; Wang, S.; Zhang, Z.; Huang, S. Extracting the flood extent from satellite SAR image with the support of topographic data. In Proceedings of the 2001 International Conferences on Info-Tech and Info-Net, Beijing, China, 29 October–1 November 2001; pp. 87–92. [Google Scholar]
- Chen, J.; Chen, S.; Fu, R.; Li, D.; Jiang, H.; Wang, C.; Peng, Y.; Jia, K.; Hicks, B.J. Remote sensing big data for water environment monitoring: Current status, challenges, and future prospects. Earth’s Future 2022, 10, e2021EF002289. [Google Scholar] [CrossRef]
- Cheng, C.; Zhang, F.; Shi, J.; Kung, H.-T. What is the relationship between land use and surface water quality? A review and prospects from remote sensing perspective. Environ. Sci. Pollut. Res. 2022, 29, 56887–56907. [Google Scholar] [CrossRef]
- Wu, P.; Fu, J.; Yi, X.; Wang, G.; Mo, L.; Maponde, B.T.; Liang, H.; Tao, C.; Ge, W.; Jiang, T. Research on water extraction from high resolution remote sensing images based on deep learning. Front. Remote Sens. 2023, 4, 1283615. [Google Scholar] [CrossRef]
- Li, M.; Wu, P.; Wang, B.; Park, H.; Hui, Y.; Wu, Y. A Deep Learning Method of Water Body Extraction from High Resolution Remote Sensing Images with Multisensors. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 3120–3132. [Google Scholar] [CrossRef]
- Zhang, Y.; Yang, Y.; Gao, X.; Xu, L.; Liu, B.; Liang, X. Robust Extraction of Multiple-Type Support Positioning Devices in the Catenary System of Railway Dataset Based on MLS Point Clouds. IEEE Trans. Geosci. Remote Sens. 2023, 61, 5702314. [Google Scholar] [CrossRef]
- Wu, B.; Gao, Y.; Xie, X.; Yang, Y. Research and Application of Automatic Recognition and Extraction of Water Body in Remote Sensing Images Based on Deep Learning. In Wireless Technology, Intelligent Network Technologies, Smart Services and Applications. Smart Innovation, Systems and Technologies; Springer: Singapore, 2022. [Google Scholar]
- Qi, B.; Zhuang, Y.; Chen, H.; Dong, S.; Li, L. Fusion Feature Multi-Scale Pooling for Water Body Extraction from Optical Panchromatic Images. Remote Sens. 2019, 11, 245. [Google Scholar] [CrossRef]
- Kang, J.; Guan, H.; Li, X.J. WaterFormer: A coupled transformer and CNN network for waterbody detection in optical remotely-sensed imagery. ISPRS J. Photogramm. Remote Sens. 2023, 206, 222–241. [Google Scholar] [CrossRef]
- Chen, B.; Huang, B.; Xu, B. Multi-source remotely sensed data fusion for improving land cover classification. ISPRS J. Photogramm. Remote Sens. 2017, 124, 27–39. [Google Scholar] [CrossRef]
- Sun, D.; Gao, G.; Huang, L.; Liu, Y.; Liu, D. Extraction of water bodies from high-resolution remote sensing imagery based on a deep semantic segmentation network. Sci. Rep. 2024, 14, 14604. [Google Scholar] [CrossRef]
- Cheng, X.; Han, K.; Xu, J.; Li, G.; Xiao, X.; Zhao, W.; Gao, X. SPFDNet: Water Extraction Method Based on Spatial Partition and Feature Decoupling. Remote Sens. 2024, 16, 3959. [Google Scholar] [CrossRef]
- Nath, R.K.; Deb, S.K. Water-Body Area Extraction from High Resolution Satellite Images-An Introduction, Review, and Comparison. Int. J. Image Process. 2010, 3, 353–372. [Google Scholar]
- Zhu, Y.; Sun, L.J.; Zhang, C.Y. Summary of water body extraction methods based on ZY-3 satellite. In Proceedings of the Iop Conference Series: Earth & Environmental Science, Shanghai, China, 19–22 October 2017. [Google Scholar]
- Chen, C.; Liang, J.; Chen, Z.J. Method of Water Body Information Extraction in Complex Geographical Environment from Remote Sensing Images. Sens. Mater. Int. J. Sens. Technol. 2022, 34, 4325–4338. [Google Scholar] [CrossRef]
- Li, J.; Meng, Y.; Li, Y.; Cui, Q.; Yang, X.; Tao, C.; Wang, Z.; Li, L.; Zhang, W. Accurate water extraction using remote sensing imagery based on normalized difference water index and unsupervised deep learning. J. Hydrol. 2022, 612, 128202. [Google Scholar] [CrossRef]
- Liu, C.; Tang, H.; Ji, L.; Zhao, Y. Spatial-temporal water area monitoring of Miyun Reservoir using remote sensing imagery from 1984 to 2020. arXiv 2021, arXiv:2110.09515. [Google Scholar] [CrossRef]
- Maulik, U.; Chakraborty, D. Remote Sensing Image Classification: A survey of support-vector-machine-based advanced techniques. IEEE Geosci. Remote Sens. Mag. 2017, 5, 33–52. [Google Scholar] [CrossRef]
- Sheykhmousa, M.; Mahdianpari, M.; Ghanbari, H.; Mohammadimanesh, F.; Ghamisi, P.; Homayouni, S. Support Vector Machine Versus Random Forest for Remote Sensing Image Classification: A Meta-Analysis and Systematic Review. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 6308–6325. [Google Scholar] [CrossRef]
- Gao, X.; Wang, M.; Yang, Y.; Li, G. Building Extraction From RGB VHR Images Using Shifted Shadow Algorithm. IEEE Access 2018, 6, 22034–22045. [Google Scholar] [CrossRef]
- Cao, H.; Tian, Y.; Liu, Y.; Wang, R. Water body extraction from high spatial resolution remote sensing images based on enhanced U-Net and multi-scale information fusion. Sci. Rep. 2024, 14, 16132. [Google Scholar] [CrossRef]
- Acharya, T.D.; Subedi, A.; Lee, D.H. Evaluation of machine learning algorithms for surface water extraction in a Landsat 8 scene of Nepal. Sensors 2019, 19, 2769. [Google Scholar] [CrossRef]
- Hu, W. Urban Water Extraction with UAV High-Resolution Remote Sensing Data Based on an Improved U-Net Model. Remote Sens. 2021, 13, 3165. [Google Scholar] [CrossRef]
- Chen, Y.; Fan, R.S.; Yang, X.C.; Wang, J.X.; Latif, A. Extraction of Urban Water Bodies from High-Resolution Remote-Sensing Imagery Using Deep Learning. Water 2018, 10, 585. [Google Scholar] [CrossRef]
- Georganos, S.; Grippa, T.; Vanhuysse, S.; Lennert, M.; Shimoni, M.; Kalogirou, S.; Wolff, E. Less is more: Optimizing classification performance through feature selection in a very-high-resolution remote sensing object-based urban application. Giscience Remote Sens. 2017, 55, 221–242. [Google Scholar] [CrossRef]
- Li, J.; Cheng, K.; Wang, S.; Morstatter, F.; Trevino, R.P.; Tang, J.; Liu, H. Feature Selection: A Data Perspective. Acm Comput. Surv. 2016, 50, 94. [Google Scholar] [CrossRef]
- Rad, A.M.; Kreitler, J.; Sadegh, M. Augmented Normalized Difference Water Index for improved surface water monitoring. Environ. Model. Softw. 2021, 140, 105030. [Google Scholar] [CrossRef]
- Zhang, T.; Ji, W.; Li, W.; Qin, C.; Wang, T.; Ren, Y.; Fang, Y.; Han, Z.; Jiao, L. EDWNet: A Novel Encoder–Decoder Architecture Network for Water Body Extraction from Optical Images. Remote Sens. 2024, 16, 4275. [Google Scholar] [CrossRef]
- Zhu, X.X.; Tuia, D.; Mou, L.; Xia, G.S.; Zhang, L.; Xu, F.; Fraundorfer, F. Deep Learning in Remote Sensing: A Comprehensive Review and List of Resources. IEEE Geosci. Remote Sens. Mag. 2018, 5, 8–36. [Google Scholar] [CrossRef]
- Liu, T.; Yuan, M.; Lu, C.; Lu, K.; Peng, B.; Duan, H.; Li, M.; Zhang, P.; Wang, T.; Liao, T. Water Body Extraction from SAR and Multi-Source Data Using Siamese Network-Based Segmentation. In Proceedings of the IGARSS 2024-2024 IEEE International Geoscience and Remote Sensing Symposium, Athens, Greece, 7–12 July 2024; pp. 772–775. [Google Scholar]
- Shuangtong, L.; Ming-Xiao, W.; Shuwen, Y.; Mingze, Y.; Lihua, Y. Extraction accuracy and stability analysis of different water body index models in GF-2 images. Bull. Surv. Mapp. 2019, 8, 135. [Google Scholar]
- Lan, L.; Wang, Y.G.; Chen, H.S.; Gao, X.R.; Wang, X.K.; Yan, X.F. Improving on mapping long-term surface water with a novel framework based on the Landsat imagery series. J. Environ. Manag. 2024, 353, 120202. [Google Scholar] [CrossRef]
- Wang, Z.; Liu, J.; Li, J.; Zhang, D.D. Multi-Spectral Water Index (MuWI): A Native 10-m Multi-Spectral Water Index for Accurate Water Mapping on Sentinel-2. Remote Sens. 2018, 10, 1643. [Google Scholar] [CrossRef]
- Fang-Fang, Z.; Bing, Z.; Jun-Sheng, L.; Qian, S.; Yuanfeng, W.; Yang, S. Comparative Analysis of Automatic Water Identification Method Based on Multispectral Remote Sensing. Procedia Environ. Sci. 2011, 11, 1482–1487. [Google Scholar] [CrossRef]
- Zhang, W.; Zhao, L. The Track, Hotspot and Frontier of International Hyperspectral remote sensing Research 2009–2019—A Bibliometric Analysis Based on SCI Database. Measurement 2021, 187, 110229. [Google Scholar] [CrossRef]
- Kurban, T. Region based multi-spectral fusion method for remote sensing images using differential search algorithm and IHS transform. Expert Syst. Appl. 2022, 189, 116135. [Google Scholar] [CrossRef]
- Yan, Y.; Yu, W.; Zhang, L. A method of band selection of remote sensing image based on clustering and intra-class index. Multimed. Tools Appl. 2022, 81, 22111–22128. [Google Scholar] [CrossRef]
- Zhao, B.; Wu, J.; Han, X.; Tian, F.; Liu, M.; Chen, M.; Lin, J. An improved surface water extraction method by integrating multi-type priori information from remote sensing. Int. J. Appl. Earth Obs. Geoinf. 2023, 124, 103529. [Google Scholar] [CrossRef]
- Ma, L.; Li, M.; Ma, X.; Cheng, L.; Du, P.; Liu, Y. A review of supervised object-based land-cover image classification. ISPRS J. Photogramm. Remote Sens. 2017, 130, 277–293. [Google Scholar] [CrossRef]
- Lang, S. Object-based image analysis for remote sensing applications: Modeling reality—Dealing with complexity. In Object-Based Image Analysis; Springer: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- Zhang, X.; Zhang, T.; Jiao, J.L. Remote Sensing Object Detection Meets Deep Learning: A metareview of challenges and advances. Geosci. Remote Sens. 2023, 11, 8–44. [Google Scholar] [CrossRef]
- Paul, A.; Tripathi, D.; Dutta, D. Application and comparison of advanced supervised classifiers in extraction of water bodies from remote sensing images. Sustain. Water Resour. Manag. 2018, 4, 905–919. [Google Scholar] [CrossRef]
- Xue, Y.; Qin, C.; Baosheng, W.U.; Dan, L.I.; Xudong, F.U. Automatic extraction of mountain river information from multiple Chinese high-resolution remote sensing satellite images. J. Tsinghua Univ. (Sci. Technol.) 2023, 63, 134–145. [Google Scholar]
- Sharma, R.; Ghosh, A.; Joshi, P.K. Analysing spatio-temporal footprints of urbanization on environment of Surat city using satellite-derived bio-physical parameters. Geocarto Int. 2012, 28, 420–438. [Google Scholar] [CrossRef]
- Shaowei, W.; Xiaoxiang, Z.; Xiaoying, Y. Land Use Classification based on Remote Sensing Image in Taihu Lake Lakeside Sensitive Area. Remote Sens. Technol. Appl. 2014, 29, 114–121. [Google Scholar]
- Blaschke, T. Object based image analysis for remote sensing. ISPRS J. Photogramm. Remote Sens. 2010, 65, 2–16. [Google Scholar] [CrossRef]
- Xu, J. Optimization of Remote-Sensing Image-Segmentation Decoder Based on Multi-Dilation and Large-Kernel Convolution. Remote Sens. 2024, 16, 2851. [Google Scholar] [CrossRef]
- Li, E.; Samat, A.; Du, P.; Liu, W.; Hu, J. Improved Bilinear CNN Model for Remote Sensing Scene Classification. IEEE Geosci. Remote Sens. Lett. 2020, 19, 8004305. [Google Scholar] [CrossRef]
- Pan, J.; Wei, Z.; Zhao, Y.; Zhou, Y.; Lin, X.; Zhang, W.; Tang, C. Enhanced FCN for farmland extraction from remote sensing image. Multimed. Tools Appl. 2022, 81, 38123–38150. [Google Scholar] [CrossRef]
- Yu, Y.; Yao, Y.; Guan, H.; Li, D.; Liu, Z.; Wang, L.; Yu, C.; Xiao, S.; Wang, W.; Chang, L. A self-attention capsule feature pyramid network for water body extraction from remote sensing imagery. Int. J. Remote Sens. 2021, 42, 1801–1822. [Google Scholar] [CrossRef]
- Chen, L.C.; Papandreou, G.; Kokkinos, I.; Murphy, K.; Yuille, A.L. DeepLab: Semantic Image Segmentation with Deep Convolutional Nets, Atrous Convolution, and Fully Connected CRFs. IEEE Trans. Pattern Anal. Mach. Intell. 2018, 40, 834–848. [Google Scholar] [CrossRef]
- Wu, B.; Zhang, J.; Zhao, Y. A Novel Method to Extract Narrow Water Using a Top-Hat White Transform Enhancement Technique. J. Indian Soc. Remote Sens. 2019, 47, 391–400. [Google Scholar] [CrossRef]
- Kang, J.; Guan, H.; Peng, D.; Chen, Z. Multi-scale context extractor network for water-body extraction from high-resolution optical remotely sensed images. Int. J. Appl. Earth Obs. Geoinf. 2021, 103, 102499. [Google Scholar] [CrossRef]
- Horé, A.; Ziou, D. Image quality metrics: PSNR vs. SSIM. In Proceedings of the 20th International Conference on Pattern Recognition, ICPR 2010, Istanbul, Turkey, 23–26 August 2010. [Google Scholar]
- Xu, Y.; Lin, J.; Zhao, J.; Zhu, X. New method improves extraction accuracy of lake water bodies in Central Asia. J. Hydrol. 2021, 603, 127180. [Google Scholar] [CrossRef]
- Tong, X.-Y.; Xia, G.-S.; Lu, Q.; Shen, H.; Li, S.; You, S.; Zhang, L. Land-cover classification with high-resolution remote sensing images using transferable deep models. Remote Sens. Environ. 2020, 237, 111322. [Google Scholar] [CrossRef]
- Chen, R.; Pu, Y.; Zhou, J.; Li, J.; Wang, X. Small Water Body Extraction Based on GF-2 Image. Laser Optoelectron. Prog. 2023, 60, 1628002. [Google Scholar]
- Li, L.; Wu, K.; Zhou, D.-W. Extraction algorithm of mining subsidence information on water area based on support vector machine. Environ. Earth Sci. 2014, 72, 3991–4000. [Google Scholar] [CrossRef]
- Dang, B.; Li, Y. MSResNet: Multiscale residual network via self-supervised learning for water-body detection in remote sensing imagery. Remote Sens. 2021, 13, 3122. [Google Scholar] [CrossRef]
- Wang, R.; Zhang, C.; Chen, C.; Hao, H.; Li, W.; Jiao, L. A Multi-Modality Fusion and Gated Multi-Filter U-Net for Water Area Segmentation in Remote Sensing. Remote Sens. 2024, 16, 419. [Google Scholar] [CrossRef]
- Zhang, Z.; Lu, M.; Ji, S.; Yu, H.; Nie, C. Rich CNN features for water-body segmentation from very high resolution aerial and satellite imagery. Remote Sens. 2021, 13, 1912. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | CR/% | CM/% | F1/% | OA/% |
|---|---|---|---|---|
| Initial result | 85.53 | 56.65 | 68.15 | 97.73 |
| Small water optimization | 62.67 | 41.25 | 49.75 | 96.43 |
| SVM classification | 60.67 | 62.56 | 56.35 | 96.50 |
| MFGF_U-Net | 51.56 | 49.12 | 50.31 | 95.84 |
| MSResNet | 67.95 | 55.00 | 60.80 | 96.96 |
| MECNet | 66.86 | 35.47 | 46.35 | 96.48 |
| Ours | 75.39 | 71.78 | 73.54 | 98.65 |
| Method | CR/% | CM/% | F1/% | OA/% |
|---|---|---|---|---|
| Initial result | 98.22 | 54.52 | 70.12 | 93.19 |
| Small water optimization | 98.63 | 61.47 | 75.74 | 94.23 |
| SVM classification | 97.03 | 55.04 | 70.24 | 93.17 |
| MFGF_U-Net | 67.29 | 76.23 | 71.48 | 91.09 |
| MSResNet | 98.94 | 41.24 | 58.22 | 91.33 |
| MECNet | 72.10 | 73.63 | 72.86 | 91.96 |
| Ours | 95.71 | 69.13 | 80.27 | 95.02 |
| Method | CR/% | CM/% | F1/% | OA/% |
|---|---|---|---|---|
| Initial result | 97.32 | 59.23 | 73.64 | 97.16 |
| Small water optimization | 68.85 | 62.11 | 65.31 | 95.59 |
| SVM classification | 76.74 | 58.99 | 66.70 | 96.06 |
| MFGF_U-Net | 47.04 | 93.97 | 62.69 | 92.52 |
| MSResNet | 91.57 | 58.24 | 71.20 | 96.85 |
| MECNet | 98.18 | 51.53 | 67.59 | 96.69 |
| Ours | 81.98 | 84.94 | 83.43 | 97.74 |
| Method | CR/% | CM/% | F1/% | OA/% |
|---|---|---|---|---|
| Initial result | 99.65 | 48.39 | 65.14 | 85.30 |
| Small water optimization | 99.55 | 66.47 | 79.71 | 90.39 |
| SVM classification | 99.99 | 49.98 | 66.65 | 85.80 |
| MFGF_U-Net | 88.40 | 67.97 | 76.85 | 88.37 |
| MSResNet | 99.81 | 22.89 | 37.24 | 78.09 |
| MECNet | 75.01 | 68.79 | 71.76 | 84.63 |
| Ours | 97.55 | 75.24 | 84.95 | 92.43 |
| Modules | CR/% | CM/% | F1/% | OA/% |
|---|---|---|---|---|
| Initial results | 65.91 | 91.71 | 76.70 | 96.88 |
| PO | 90.83 | 92.15 | 90.42 | 97.57 |
| PO + DO | 94.95 | 93.71 | 92.30 | 98.41 |
| PO + DO + NO | 97.92 | 95.38 | 96.64 | 99.46 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, J.; Gao, X.; Wang, Z.; Li, G.; Luan, H.; Cheng, X.; Yao, S.; Wang, L.; Shi, S.; Xiao, X.; et al. Combining Global Features and Local Interoperability Optimization Method for Extracting and Connecting Fine Rivers. Remote Sens. 2025, 17, 742. https://doi.org/10.3390/rs17050742
Xu J, Gao X, Wang Z, Li G, Luan H, Cheng X, Yao S, Wang L, Shi S, Xiao X, et al. Combining Global Features and Local Interoperability Optimization Method for Extracting and Connecting Fine Rivers. Remote Sensing. 2025; 17(5):742. https://doi.org/10.3390/rs17050742
Chicago/Turabian StyleXu, Jian, Xianjun Gao, Zaiai Wang, Guozhong Li, Hualong Luan, Xuejun Cheng, Shiming Yao, Lihua Wang, Sunan Shi, Xiao Xiao, and et al. 2025. "Combining Global Features and Local Interoperability Optimization Method for Extracting and Connecting Fine Rivers" Remote Sensing 17, no. 5: 742. https://doi.org/10.3390/rs17050742
APA StyleXu, J., Gao, X., Wang, Z., Li, G., Luan, H., Cheng, X., Yao, S., Wang, L., Shi, S., Xiao, X., & Xie, X. (2025). Combining Global Features and Local Interoperability Optimization Method for Extracting and Connecting Fine Rivers. Remote Sensing, 17(5), 742. https://doi.org/10.3390/rs17050742