
Derivation of Hyperspectral Profiles for Global Extended Pseudo Invariant Calibration Sites (EPICS) and Their Application in Satellite Sensor Cross-Calibration

 , and
, and
Abstract
1. Introduction
2. Materials and Methods
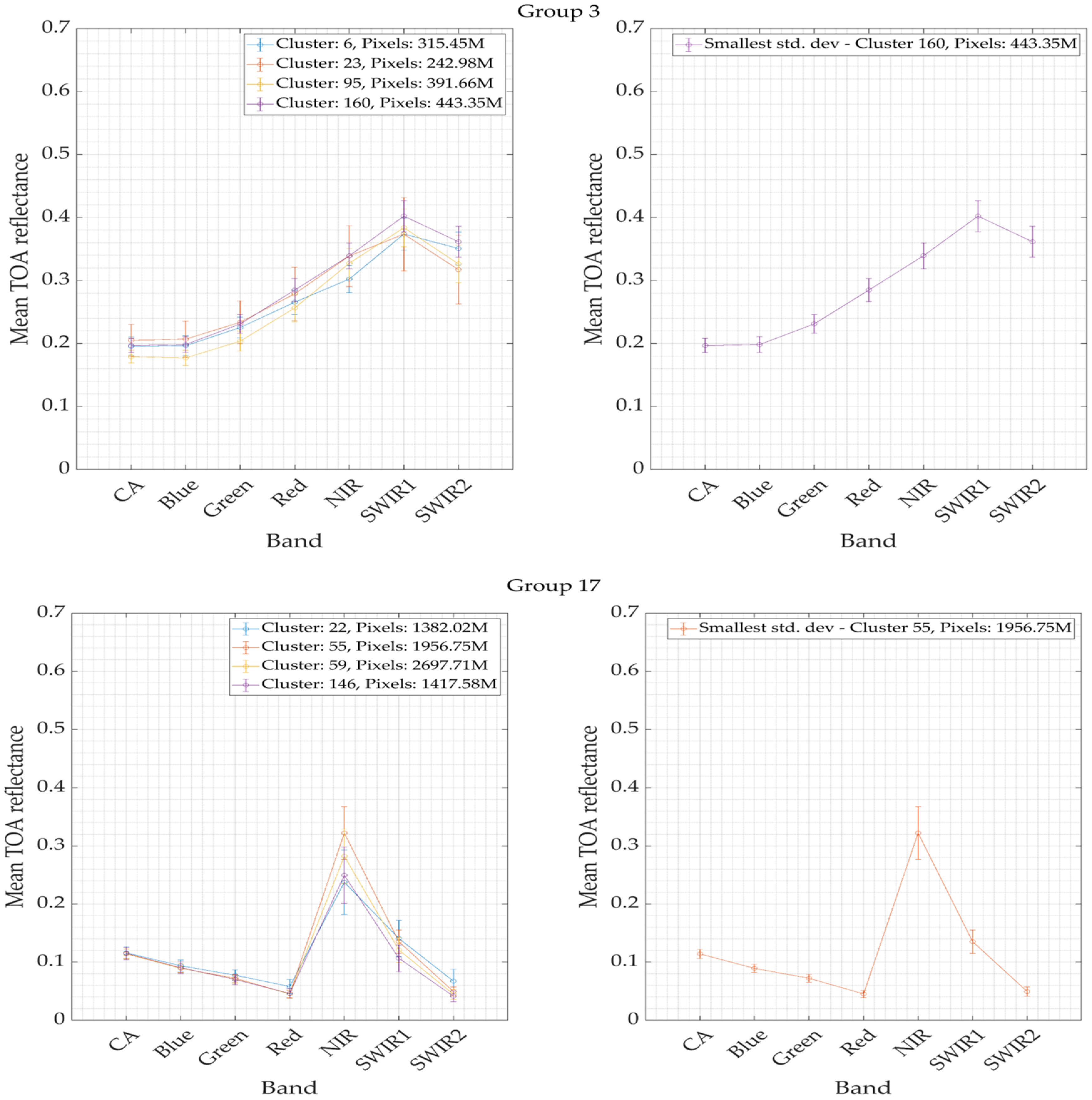
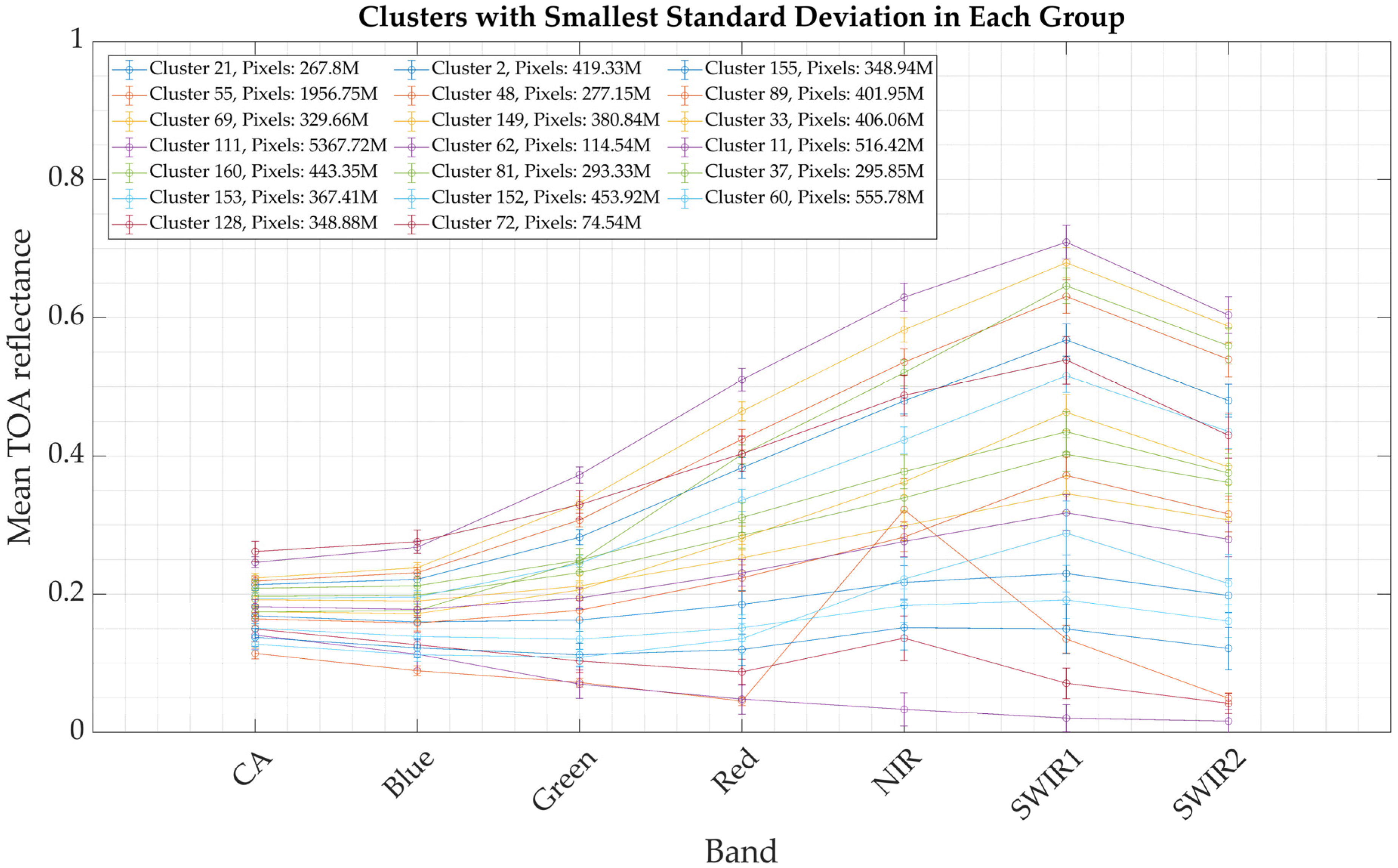
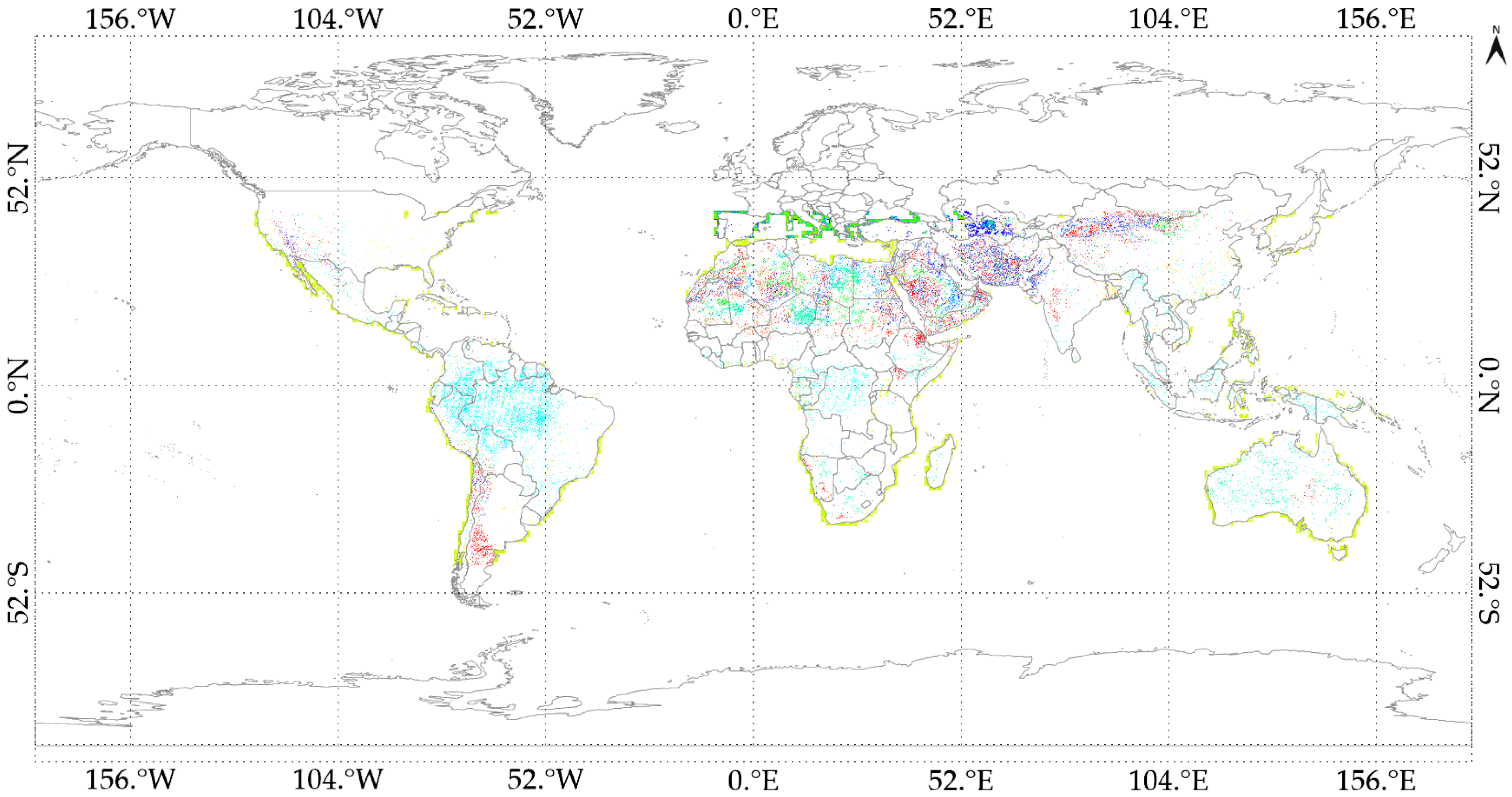
2.1. Selection of Optimal EPICS from Global Land Cover Clustering Analysis
2.2. Data Collection
2.2.1. Earth Observing-1 (EO-1) Hyperion
2.2.2. DLR Earth Sensing Imaging Spectrometer (DESIS)
2.3. Data Processing
2.3.1. EPICS Zonal Masks for EPICS Processing
2.3.2. TOA Reflectance Retrieval of Hyperspectral Data
2.3.3. Cloud Filtering and Outlier Rejection
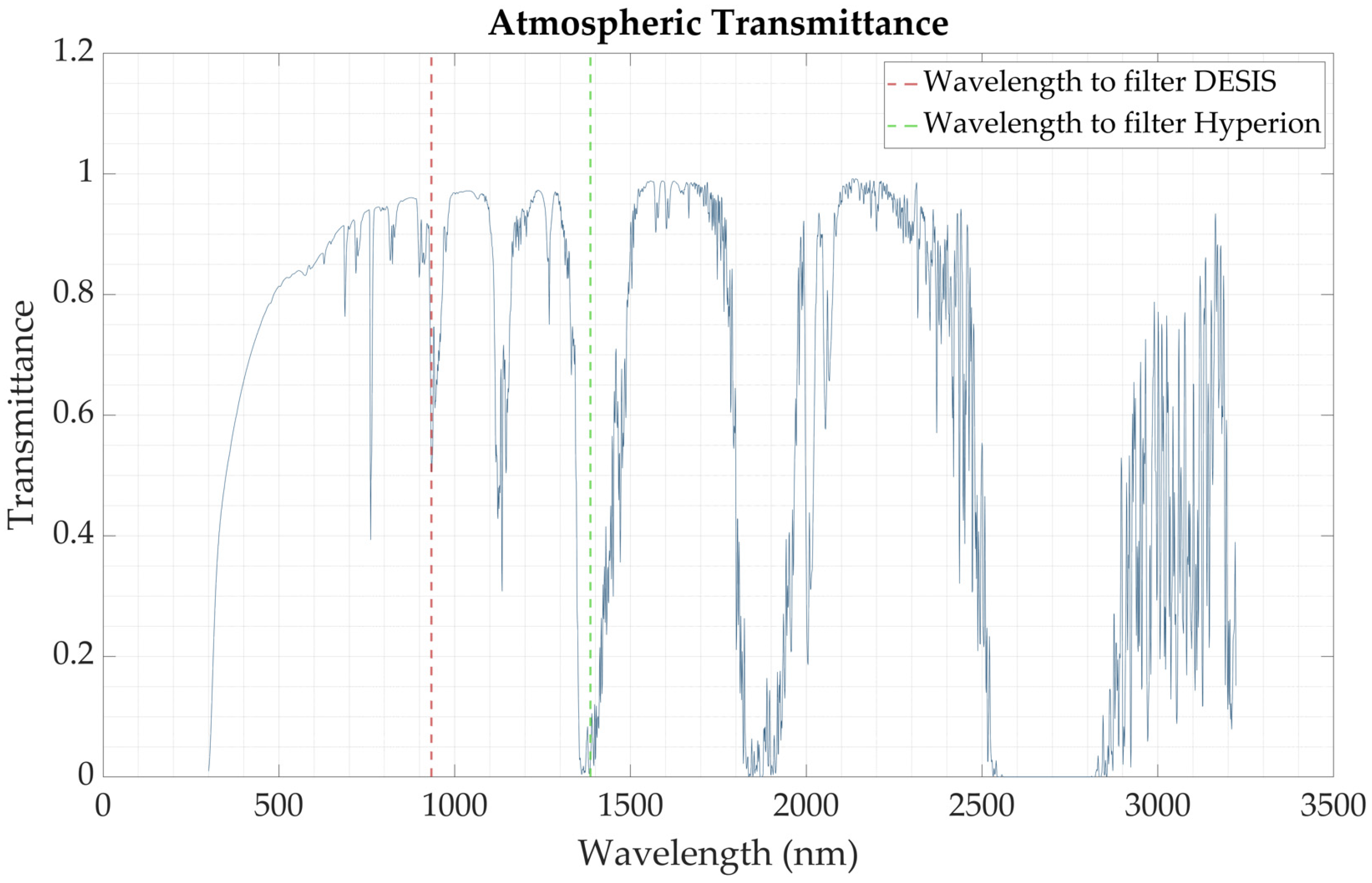
2.3.4. Correction of Hyperspectral Data
Hyperion
DESIS
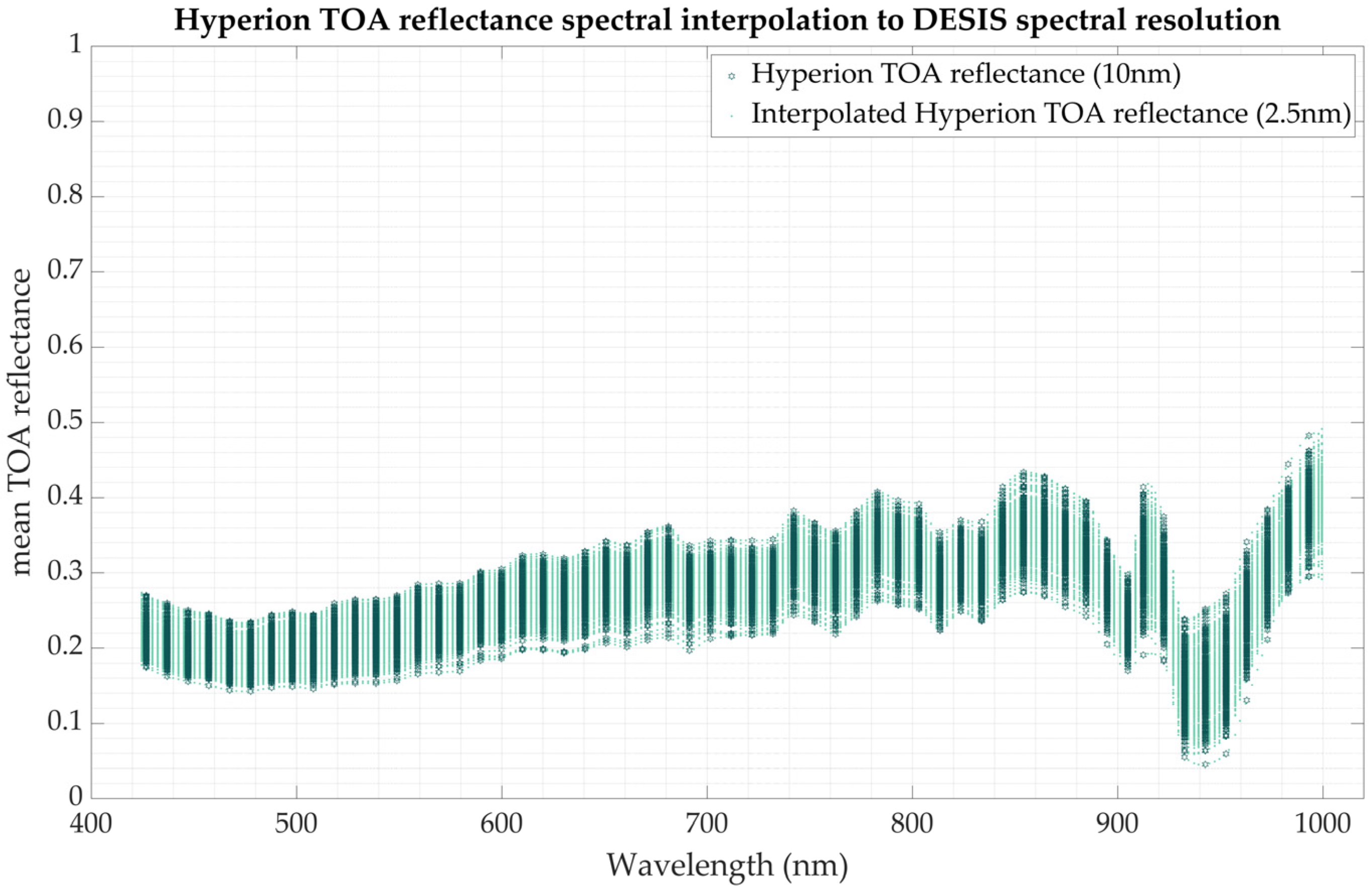
2.3.5. Spectral Interpolation of Hyperion Data
2.4. BRDF Normalization
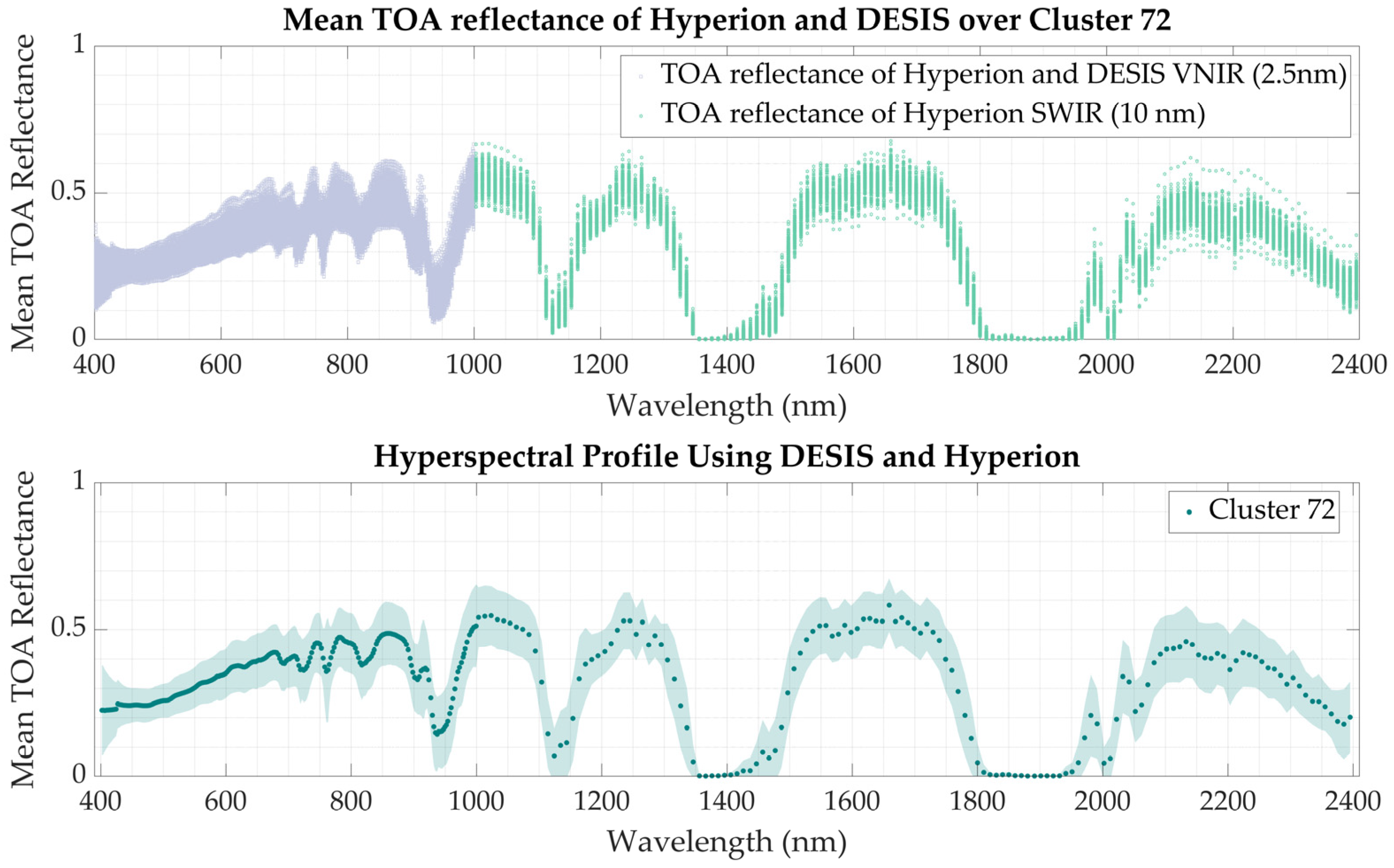
2.5. EPICS Hyperspectral Profile Estimation
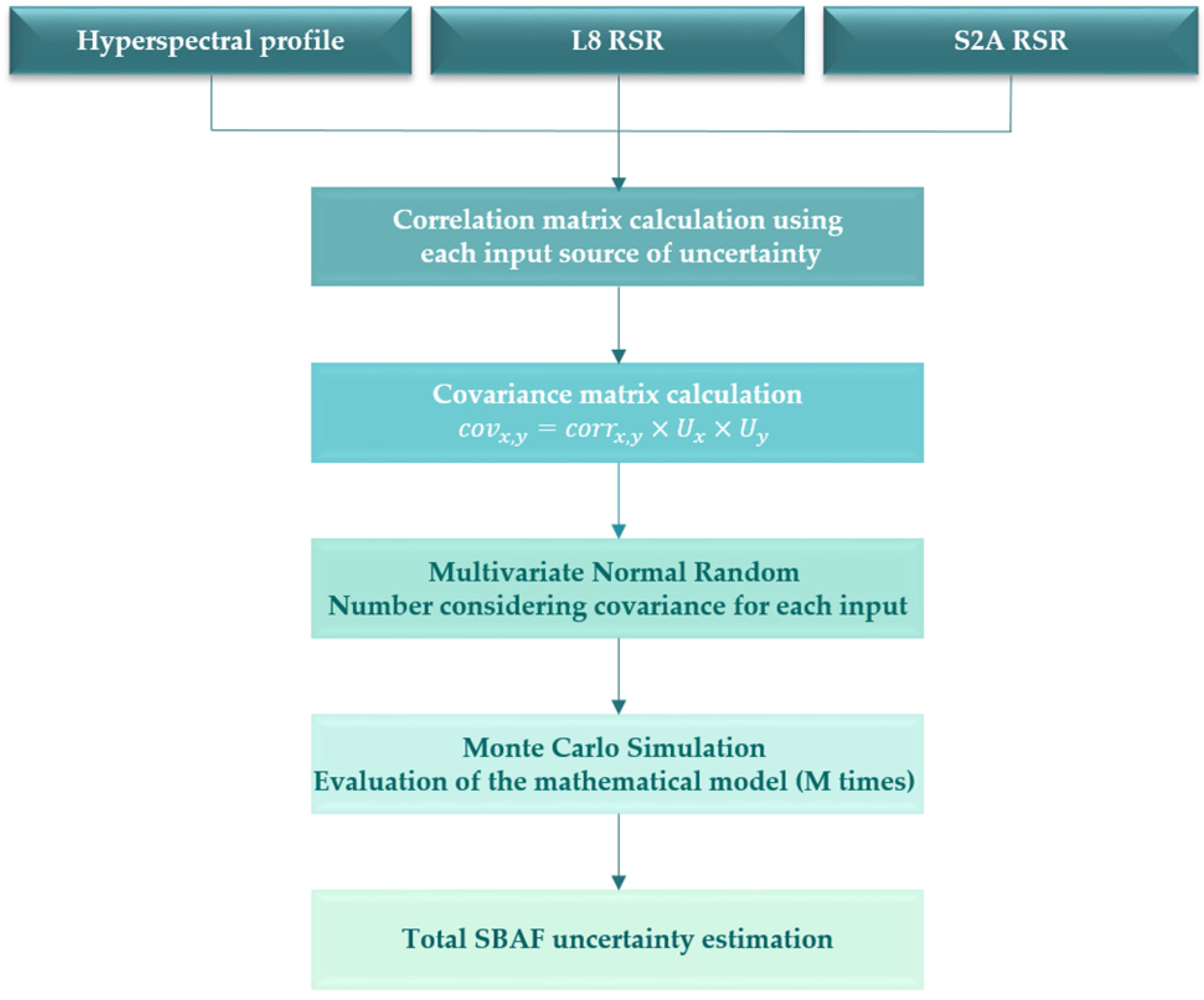
2.6. EPICS Hyperspectral Profile Uncertainty Estimation
2.7. Hyperpectral Profile Validation Methodology
2.7.1. Hyperspectral Profile Validation Targets
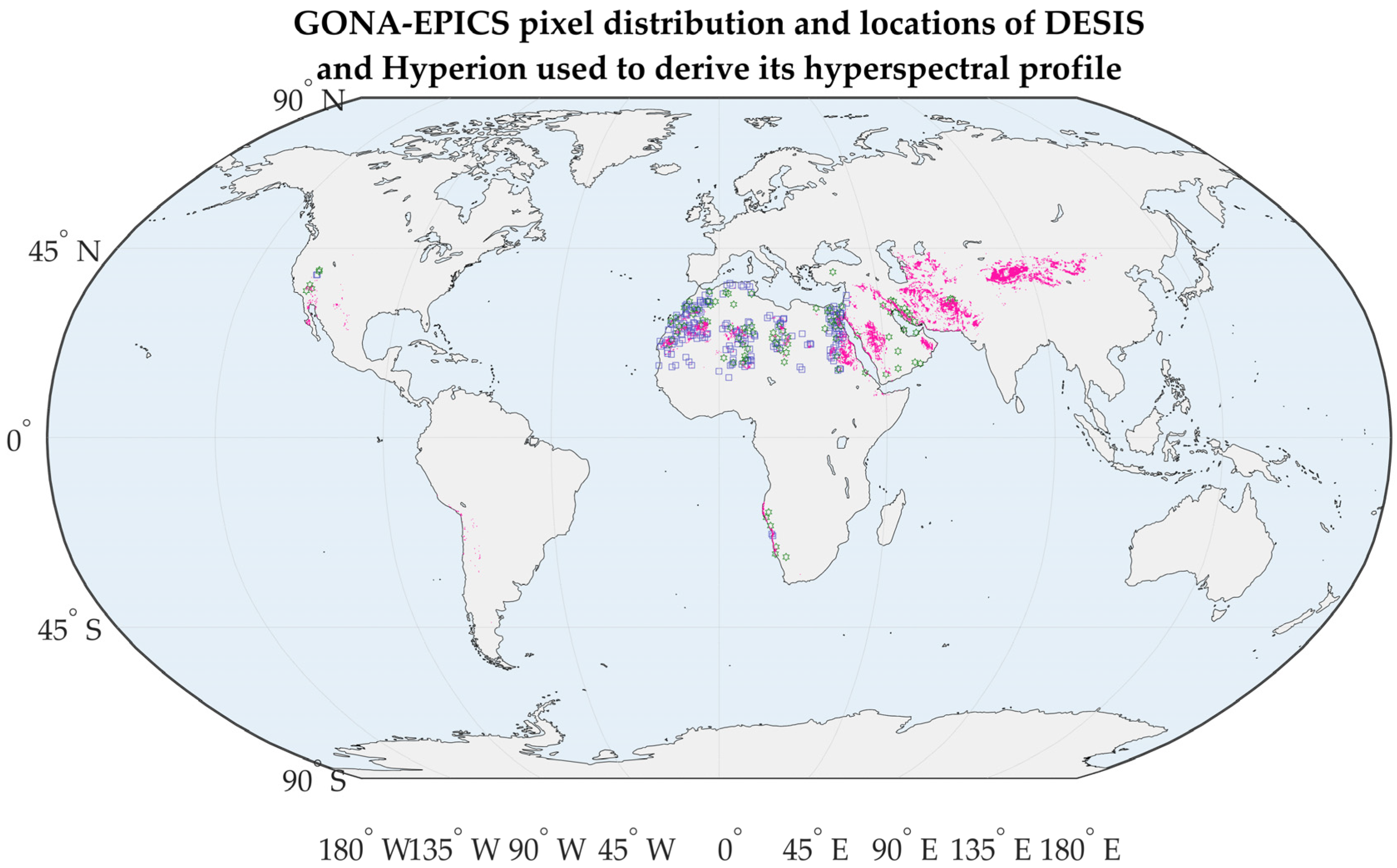
GONA-EPICS
RadCalNet-GONA
2.7.2. RadCalNet-GONA vs. GONA-EPICS Hyperspectral Signature Validation Methodology
Welch’s Test
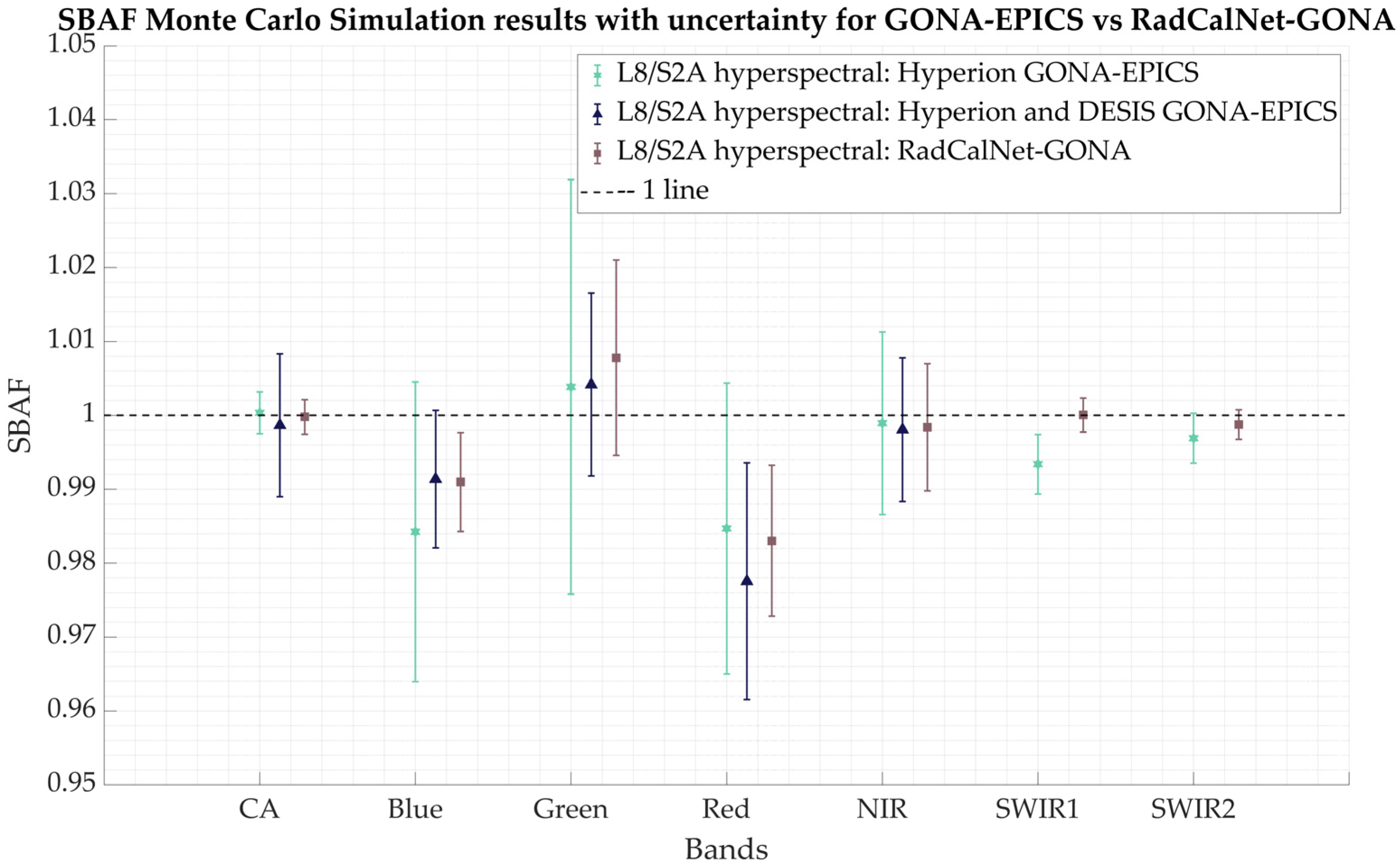
2.7.3. Validation of SBAFs Derived from RadCalNet-GONA vs. GONA-EPICS Methodology
2.8. Cross-Calibration Using Derived SBAF from New Hyperspectral Profiles with EPICS Versus Traditional Cross-Calibration
2.8.1. Traditional Cross-Calibration and Its Uncertainty
2.8.2. EPICS T2T Cross-Calibration and Its Uncertainty
3. Results and Analysis
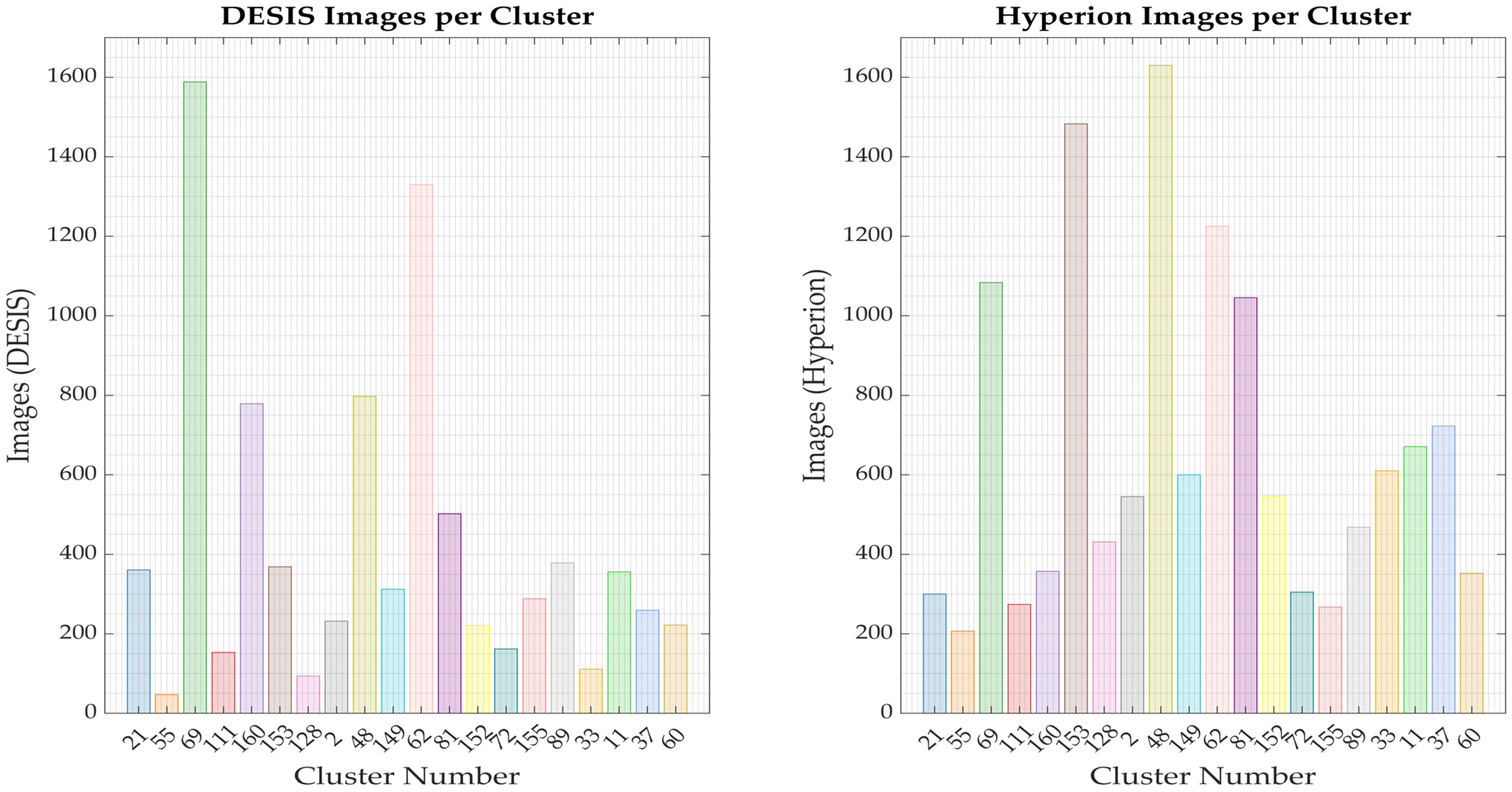
3.1. Results of 20 EPICS Selected
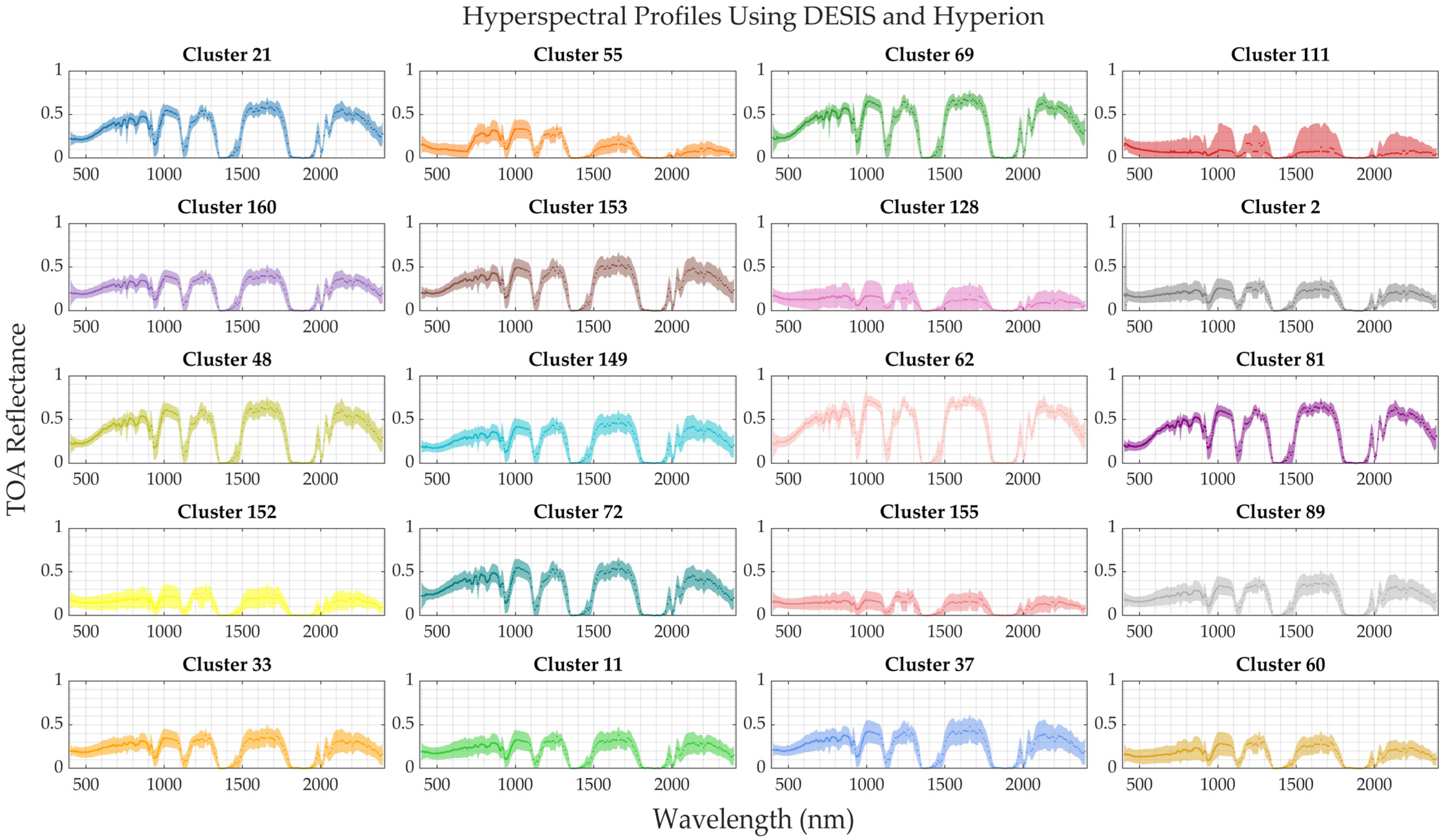
3.2. Hyperspectral Profiles of 20 EPICS
3.3. Validation Results
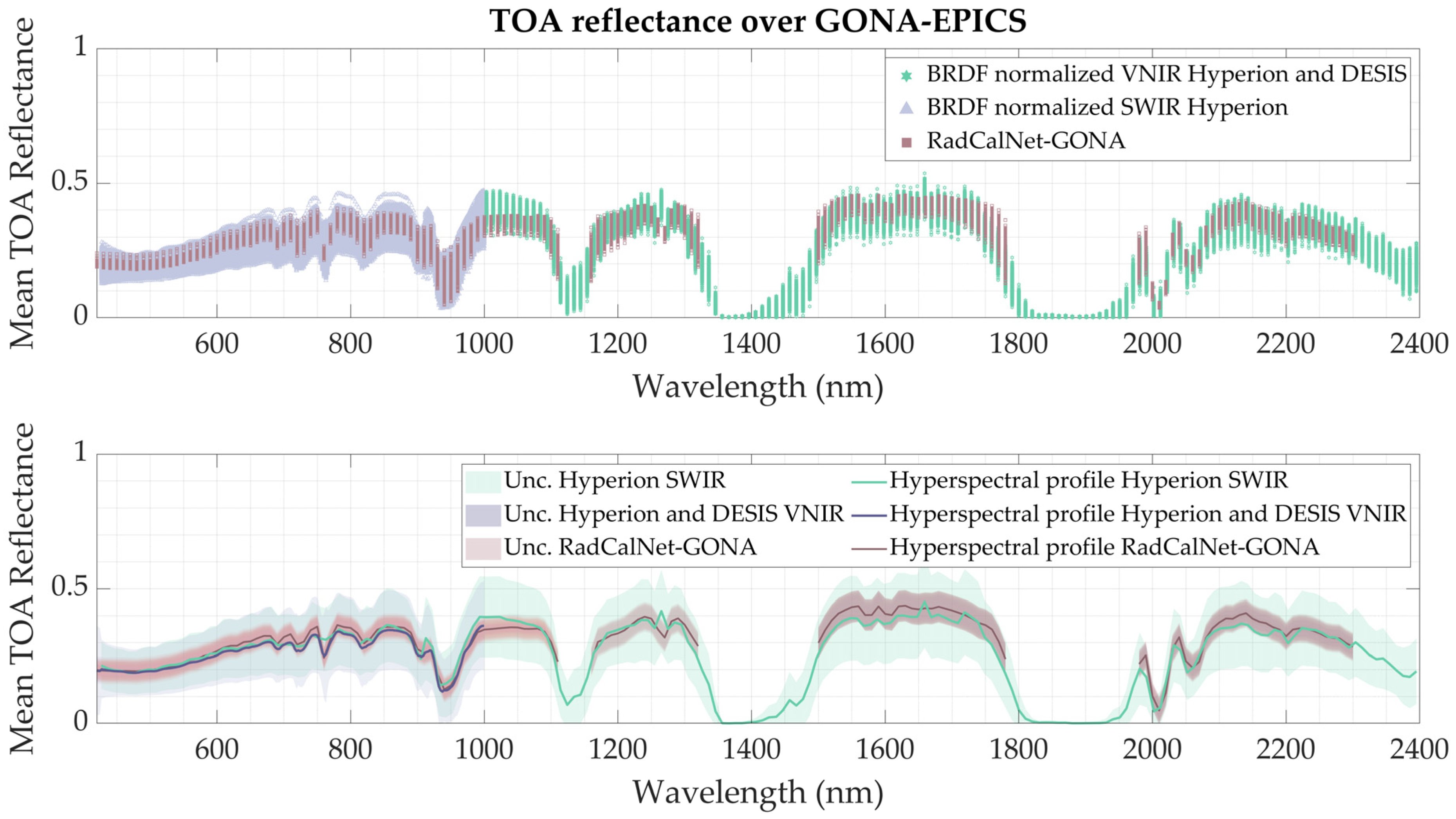
3.3.1. RadCalNet-GONA vs. GONA-EPICS
Welch’s Test Results
3.3.2. Results of Cross-Calibration: Traditional vs. T2T
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Correction Statement
References
- Zhang, X.; Friedl, M.A.; Schaaf, C.B.; Strahler, A.H.; Hodges, J.C.; Gao, F.; Reed, B.C.; Huete, A. Monitoring vegetation phenology using MODIS. Remote Sens. Environ. 2003, 84, 471–475. [Google Scholar] [CrossRef]
- Wiedinmyer, C.; Quayle, B.; Geron, C.; Belote, A.; McKenzie, D.; Zhang, X.; O’Neill, S.; Wynne, K.K. Estimating emissions from fires in North America for air quality modeling. Atmos. Environ. 2006, 40, 3419–3432. [Google Scholar] [CrossRef]
- Youssef, A.; Pradhan, B.; Tarabees, E. Integrated evaluation of urban development suitability based on remote sensing and GIS techniques: Contribution from the analytic hierarchy process. Arab. J. Geosci. 2011, 4, 463–473. [Google Scholar] [CrossRef]
- Aiken, J.; Moore, G.F.; Hotligan, P.M. Remote sensing of oceanic biology in relation to global climate change. J. Phycol. 1992, 28, 579–590. [Google Scholar] [CrossRef]
- Czapla-Myers, J.; McCorkel, J.; Anderson, N.; Thome, K.; Biggar, S.; Helder, D.; Aaron, D.; Leigh, L.; Mishra, N. The ground-based absolute radiometric calibration of Landsat 8 OLI. Remote Sens. 2015, 7, 600–626. [Google Scholar] [CrossRef]
- Wyatt, C. Radiometric Calibration: Theory and Methods; Elsevier: Amsterdam, The Netherlands, 2012. [Google Scholar]
- Helder, D.L.; Karki, S.; Bhatt, R.; Micijevic, E.; Aaron, D.; Jasinski, B. Radiometric calibration of the Landsat MSS sensor series. IEEE Trans. Geosci. Remote Sens. 2011, 50, 2380–2399. [Google Scholar] [CrossRef]
- Xiong, X.; Barnes, W. An overview of MODIS radiometric calibration and characterization. Adv. Atmos. Sci. 2006, 23, 69–79. [Google Scholar] [CrossRef]
- Chander, G.; Meyer, D.J.; Helder, D.L. Cross calibration of the Landsat-7 ETM+ and EO-1 ALI sensor. IEEE Trans. Geosci. Remote Sens. 2004, 42, 2821–2831. [Google Scholar] [CrossRef]
- Teillet, P.; Barker, J.; Markham, B.; Irish, R.; Fedosejevs, G.; Storey, J. Radiometric cross-calibration of the Landsat-7 ETM+ and Landsat-5 TM sensors based on tandem data sets. Remote Sens. Environ. 2001, 78, 39–54. [Google Scholar] [CrossRef]
- Lacherade, S.; Fougnie, B.; Henry, P.; Gamet, P. Cross calibration over desert sites: Description, methodology, and operational implementation. IEEE Trans. Geosci. Remote Sens. 2013, 51, 1098–1113. [Google Scholar] [CrossRef]
- Barsi, J.A.; Alhammoud, B.; Czapla-Myers, J.; Gascon, F.; Haque, M.O.; Kaewmanee, M.; Leigh, L.; Markham, B.L. Sentinel-2A MSI and Landsat-8 OLI radiometric cross comparison over desert sites. Eur. J. Remote Sens. 2018, 51, 822–837. [Google Scholar] [CrossRef]
- Angal, A.; Mishra, N.; Xiong, X.; Helder, D. Cross-calibration of Landsat 5 TM, and Landsat 8 OLI with Aqua MODIS using PICS. In Proceedings of the Earth Observing Systems XIX, San Diego, CA, USA, 18–20 August 2014; pp. 171–179. [Google Scholar]
- Mishra, N.; Haque, M.O.; Leigh, L.; Aaron, D.; Helder, D.; Markham, B. Radiometric cross calibration of Landsat 8 operational land imager (OLI) and Landsat 7 enhanced thematic mapper plus (ETM+). Remote Sens. 2014, 6, 12619–12638. [Google Scholar] [CrossRef]
- Fajardo Rueda, J.; Leigh, L.; Teixeira Pinto, C.; Kaewmanee, M.; Helder, D. Classification and Evaluation of Extended PICS (EPICS) on a Global Scale for Calibration and Stability Monitoring of Optical Satellite Sensors. Remote Sens. 2021, 13, 3350. [Google Scholar] [CrossRef]
- Fajardo Rueda, J.; Leigh, L.; Teixeira Pinto, C. Identification of Global Extended Pseudo Invariant Calibration Sites (EPICS) and Their Validation Using Radiometric Calibration Network (RadCalNet). Remote Sens. 2024, 16, 4129. [Google Scholar] [CrossRef]
- Khakurel, P.; Leigh, L.; Kaewmanee, M.; Pinto, C.T. Extended pseudo invariant calibration site-based trend-to-trend cross-calibration of optical satellite sensors. Remote Sens. 2021, 13, 1545. [Google Scholar] [CrossRef]
- Shah, R.; Leigh, L.; Kaewmanee, M.; Pinto, C.T. Validation of Expanded Trend-to-Trend Cross-Calibration Technique and Its Application to Global Scale. Remote Sens. 2022, 14, 6216. [Google Scholar] [CrossRef]
- Rengarajan, R.; Schott, J.R. Evaluation of sensor and environmental factors impacting the use of multiple sensor data for time-series applications. Remote Sens. 2018, 10, 1678. [Google Scholar] [CrossRef]
- Folkman, M.A.; Pearlman, J.; Liao, L.B.; Jarecke, P.J. EO-1/Hyperion hyperspectral imager design, development, characterization, and calibration. Hyperspectral Remote Sens. Land Atmos. 2001, 4151, 40–51. [Google Scholar]
- Krutz, D.; Müller, R.; Knodt, U.; Günther, B.; Walter, I.; Sebastian, I.; Säuberlich, T.; Reulke, R.; Carmona, E.; Eckardt, A. The instrument design of the DLR earth sensing imaging spectrometer (DESIS). Sensors 2019, 19, 1622. [Google Scholar] [CrossRef] [PubMed]
- Chaity, M.D.; Kaewmanee, M.; Leigh, L.; Teixeira Pinto, C. Hyperspectral Empirical Absolute Calibration Model Using Libya 4 Pseudo Invariant Calibration Site. Remote Sens. 2021, 13, 1538. [Google Scholar] [CrossRef]
- Karki, P.B.; Kaewmanee, M.; Leigh, L.; Pinto, C.T. The Development of Dark Hyperspectral Absolute Calibration Model Using Extended Pseudo Invariant Calibration Sites at a Global Scale: Dark EPICS-Global. Remote Sens. 2023, 15, 2141. [Google Scholar] [CrossRef]
- Fajardo Rueda, J.; Leigh, L.; Pinto, C.T. A Global Mosaic of Temporally Stable Pixels for Radiometric Calibration of Optical Satellite Sensors Using Landsat 8. Remote Sens. 2024, 16, 2437. [Google Scholar] [CrossRef]
- Ungar, S.G.; Pearlman, J.S.; Mendenhall, J.A.; Reuter, D. Overview of the earth observing one (EO-1) mission. IEEE Trans. Geosci. Remote Sens. 2003, 41, 1149–1159. [Google Scholar] [CrossRef]
- Franks, S.; Neigh, C.S.; Campbell, P.K.; Sun, G.; Yao, T.; Zhang, Q.; Huemmrich, K.F.; Middleton, E.M.; Ungar, S.G.; Frye, S.W. EO-1 data quality and sensor stability with changing orbital precession at the end of a 16 year mission. Remote Sens. 2017, 9, 412. [Google Scholar] [CrossRef]
- Shrestha, M.; Sampath, A.; Chandra, S.N.R.; Christopherson, J.; Shaw, J.; Anderson, C. System Characterization Report on the German Aerospace Center (DLR) Earth Sensing Imaging Spectrometer (DESIS); US Geological Survey: Reston, VA, USA, 2021; ISSN 2331-1258. [Google Scholar]
- Frank Warmerdam, E.R. GDAL Documentation. Available online: http://www.gdal.org/ (accessed on 5 March 2024).
- Alonso, K.; Bachmann, M.; Burch, K.; Carmona, E.; Cerra, D.; De los Reyes, R.; Dietrich, D.; Heiden, U.; Hölderlin, A.; Ickes, J. Data products, quality and validation of the DLR earth sensing imaging spectrometer (DESIS). Sensors 2019, 19, 4471. [Google Scholar] [CrossRef] [PubMed]
- Monali Adrija, H.; Larry, L.; Kaewmanee, M.; Rueda, J.F.; Pathiranage, D.S.; Pinto, C.T. Absolute Vicarious Calibration, Extended PICS (EPICS) based De-trending and Validation of Hyperspectral Hyperion, DESIS, and EMIT. 2025; unpublished. [Google Scholar]
- Biggar, S.F.; Thome, K.J.; Wisniewski, W. Vicarious radiometric calibration of EO-1 sensors by reference to high-reflectance ground targets. IEEE Trans. Geosci. Remote Sens. 2003, 41, 1174–1179. [Google Scholar] [CrossRef]
- Jing, X.; Leigh, L.; Helder, D.; Pinto, C.T.; Aaron, D. Lifetime absolute calibration of the EO-1 Hyperion sensor and its validation. IEEE Trans. Geosci. Remote Sens. 2019, 57, 9466–9475. [Google Scholar] [CrossRef]
- Farhad, M.M.; Kaewmanee, M.; Leigh, L.; Helder, D. Radiometric cross calibration and validation using 4 angle BRDF model between landsat 8 and sentinel 2A. Remote Sens. 2020, 12, 806. [Google Scholar] [CrossRef]
- Shrestha, M. Bidirectional Reflectance Distribution Function of Algodones Dunes. Master’s Thesis, South Dakota State University, Brookings, SD, USA, 2016. [Google Scholar]
- Kaewmanee, M. Pseudo invariant calibration sites: PICS evolution. In Proceedings of the CALCON 2018, Logan, UT, USA, 18–20 June 2018. [Google Scholar]
- McCorkel, J.; Thome, K.; Ong, L. Vicarious calibration of EO-1 Hyperion. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2012, 6, 400–407. [Google Scholar] [CrossRef]
- Bouvet, M.; Thome, K.; Berthelot, B.; Bialek, A.; Czapla-Myers, J.; Fox, N.P.; Goryl, P.; Henry, P.; Ma, L.; Marcq, S. RadCalNet: A radiometric calibration network for Earth observing imagers operating in the visible to shortwave infrared spectral range. Remote Sens. 2019, 11, 2401. [Google Scholar] [CrossRef]
- Marcq, S.; Meygret, A.; Bouvet, M.; Fox, N.; Greenwell, C.; Scott, B.; Berthelot, B.; Besson, B.; Guilleminot, N.; Damiri, B. New RadCalNet site at Gobabeb, Namibia: Installation of the instrumentation and first satellite calibration results. In Proceedings of the IGARSS 2018—2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; pp. 6444–6447. [Google Scholar]
- RadCalNet. RadCalNet Quick Start Guide. Available online: https://www.radcalnet.org (accessed on 18 June 2024).
- Lu, Z.; Yuan, K.-H. Welch’st test. Encycl. Res. Des. 2010, 1, 1620–1623. [Google Scholar]
- Revel, C.; Lonjou, V.; Marcq, S.; Desjardins, C.; Fougnie, B.; Coppolani-Delle Luche, C.; Guilleminot, N.; Lacamp, A.-S.; Lourme, E.; Miquel, C. Sentinel-2A and 2B absolute calibration monitoring. Eur. J. Remote Sens. 2019, 52, 122–137. [Google Scholar] [CrossRef]
- Gascon, F.; Bouzinac, C.; Thépaut, O.; Jung, M.; Francesconi, B.; Louis, J.; Lonjou, V.; Lafrance, B.; Massera, S.; Gaudel-Vacaresse, A. Copernicus Sentinel-2A calibration and products validation status. Remote Sens. 2017, 9, 584. [Google Scholar] [CrossRef]
- Pinto, C.T.; Ponzoni, F.J.; Castro, R.M.; Leigh, L.; Kaewmanee, M.; Aaron, D.; Helder, D. Evaluation of the uncertainty in the spectral band adjustment factor (SBAF) for cross-calibration using Monte Carlo simulation. Remote Sens. Lett. 2016, 7, 837–846. [Google Scholar] [CrossRef]
- Berthelot, B.; Meygret, A.; Desjardins, C. Monitoring the Intercalibration of L8/OLI with S2A/MSI over Libya4 PICS in the Frame of PICSCAR CEOS/IVOS Initiative. 2021. Available online: https://az659834.vo.msecnd.net/eventsairwesteuprod/production-nikal-public/27b62454333f4236a59b7574911d76d8 (accessed on 18 June 2024).
- Pinto, C.T.; Shrestha, M.; Hasan, N.; Leigh, L.; Helder, D. SBAF for cross-calibration of Landsat-8 OLI and Sentinel-2 MSI over North African PICS. In Proceedings of the Earth Observing Systems XXIII, San Diego, CA, USA, 21–23 August 2018; pp. 294–304. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
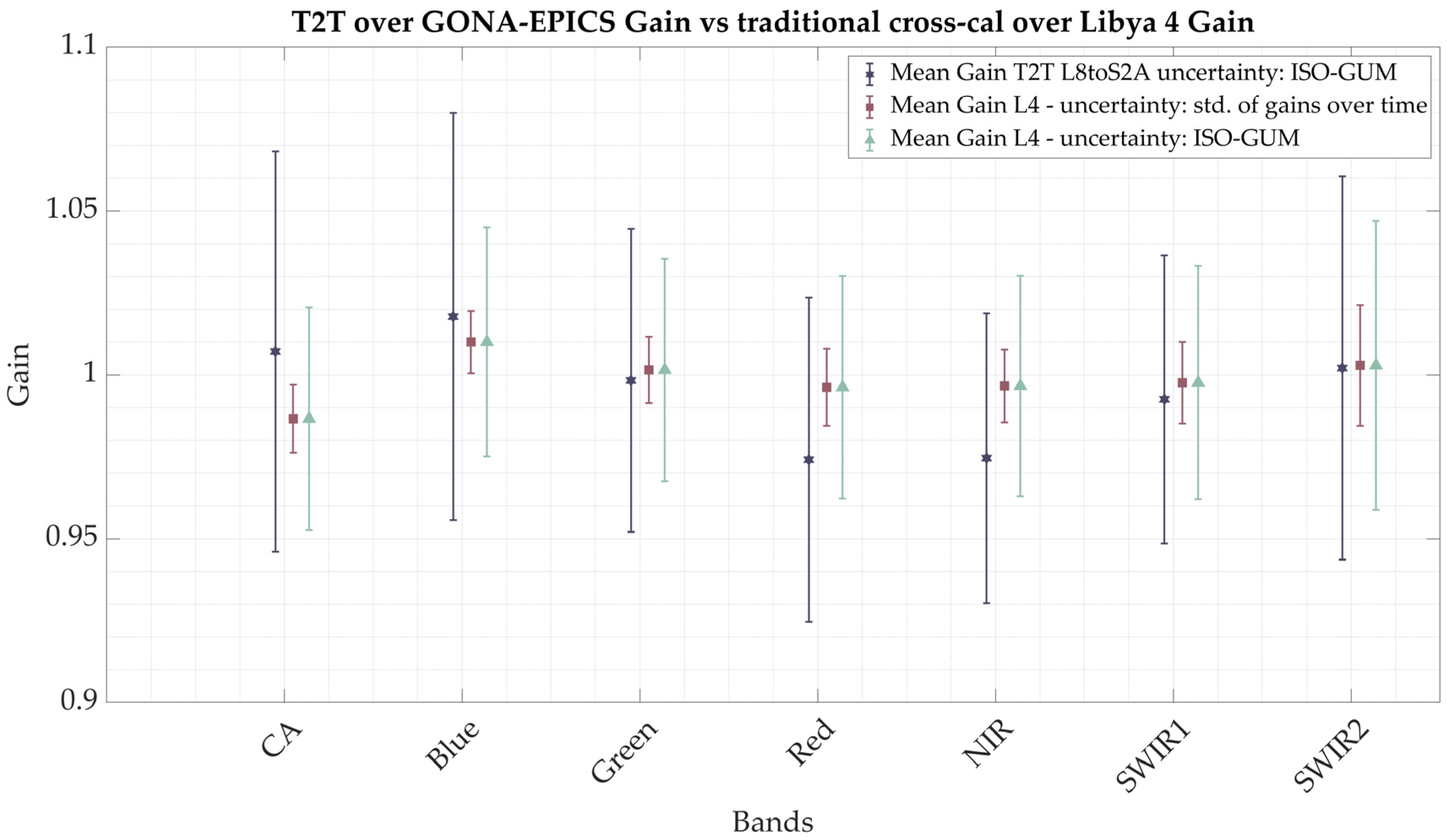
| CA | Blue | Green | Red | NIR | SWIR1 | SWIR2 | |
|---|---|---|---|---|---|---|---|
| Gain T2T | 1.01 | 1.02 | 1 | 0.97 | 0.97 | 0.99 | 1 |
| Unc. T2T (%) | 6.08 | 6.07 | 4.61 | 5.1 | 4.54 | 4.4 | 5.71 |
| Gain L4 | 0.98 | 1.01 | 0.99 | 0.99 | 0.99 | 0.99 | 1 |
| Std. L4 (%) | 1.04 | 0.95 | 1.01 | 1.17 | 1.11 | 1.24 | 1.84 |
| Gain L4 | 0.98 | 1.01 | 0.99 | 0.99 | 0.99 | 0.99 | 1 |
| Unc. L4 (%) | 3.45 | 3.46 | 3.39 | 3.41 | 3.38 | 3.57 | 4.4 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fajardo Rueda, J.; Leigh, L.; Kaewmanee, M.; Monali Adrija, H.; Teixeira Pinto, C. Derivation of Hyperspectral Profiles for Global Extended Pseudo Invariant Calibration Sites (EPICS) and Their Application in Satellite Sensor Cross-Calibration. Remote Sens. 2025, 17, 216. https://doi.org/10.3390/rs17020216
Fajardo Rueda J, Leigh L, Kaewmanee M, Monali Adrija H, Teixeira Pinto C. Derivation of Hyperspectral Profiles for Global Extended Pseudo Invariant Calibration Sites (EPICS) and Their Application in Satellite Sensor Cross-Calibration. Remote Sensing. 2025; 17(2):216. https://doi.org/10.3390/rs17020216
Chicago/Turabian StyleFajardo Rueda, Juliana, Larry Leigh, Morakot Kaewmanee, Harshitha Monali Adrija, and Cibele Teixeira Pinto. 2025. "Derivation of Hyperspectral Profiles for Global Extended Pseudo Invariant Calibration Sites (EPICS) and Their Application in Satellite Sensor Cross-Calibration" Remote Sensing 17, no. 2: 216. https://doi.org/10.3390/rs17020216
APA StyleFajardo Rueda, J., Leigh, L., Kaewmanee, M., Monali Adrija, H., & Teixeira Pinto, C. (2025). Derivation of Hyperspectral Profiles for Global Extended Pseudo Invariant Calibration Sites (EPICS) and Their Application in Satellite Sensor Cross-Calibration. Remote Sensing, 17(2), 216. https://doi.org/10.3390/rs17020216