Abstract
Remote sensing of moving targets, particularly pedestrians on the road, is crucial for advanced driver assistance systems. However, pedestrian detection using the radar system remains an ongoing challenge due to the radar cross section (RCS) of pedestrians being much smaller than that of the clutter. Existing radar systems and pedestrian detection methods predominantly rely on the single-polarization radar, while research on the fully polarized radar for pedestrian detection is relatively limited. In this paper, the L-band fully polarimetric radar system is developed for pedestrian detection, and based on the full polarized radar echo HH, HV, VH, and VV, a novel clutter suppression method is proposed, which integrates the optimal polarization states of antennas and optimal scattering characteristics of pedestrians. Moreover, the field experiment has been conducted, and the results demonstrate that the signal-to-clutter-plus-noise ratio (SCNR) of the total power signal of full-polarization echoes is higher than that of single-polarization echoes, and the proposed clutter suppression method is able to reduce the non-stationary clutter and the interference signal generated by the multipath effect, thereby improving the SCNR. Furthermore, the OTSU algorithm is employed to detect pedestrian targets using radar data before and after clutter suppression, and the results demonstrate that the proposed method yields superior detection performance. These findings justify the potential of fully polarimetric radar in enhancing pedestrian detection.
1. Introduction
Pedestrian detection using radar systems has attracted extensive interest because of high-resolution, all-weather, and all-day detection, which is widely applied in protecting pedestrians [1,2,3], intelligent transportation [4], and autonomous driving [5,6], etc. Significant progress has recently been made in millimeter-wave radar, achieving high-performance ranging and pedestrian identification, driven by key techniques such as Frequency Modulated Continuous Wave (FMCW) [7,8], beamforming [9], and micro-Doppler feature extraction [10,11,12,13], and so on. However, pedestrian detection using the radar system is facing challenges, since the radar cross section (RCS) of a pedestrian is approximately −5 dBsm, which is lower than the strong clutter from an urban environment [14,15,16].
Various radar signal processing techniques have been proposed to improve the signal-to-clutter-plus-noise ratio (SCNR) in pedestrian detection, leading to better detection performance. Moving target indication (MTI) [17,18] based on the Doppler effect is a classic static clutter suppression method, where moving targets produce Doppler frequency shift in the received radar signal, but it fails when there are fluctuating clutters in urban traffic. Researchers have developed several adaptive MTI (AMTI) techniques, which can estimate the Doppler power spectrum of the clutter signal by averaging process of the clutter data in several pulse bins [19,20]. Chen et al. presented the least mean square (LMS) adaptive filter in sparse fractional ambiguity function (SFRAF) domain to suppress the clutter while retaining the target echo as much as possible [21]. Jason Yu and Jeffrey Krolik proposed MIMO space-time adaptive processing (STAP) techniques achieving ground clutter cancellation [22].
In addition, alternative clutter removal approaches utilize radar signal transformations to effectively separate moving target signals from radar echoes [23,24,25]. A compressed sensing technique is used to project the interference signals in a reduced chirplet basis and separate the clutter from the raw radar signal, thereby eliminating clutter signals and improving the SCNR. Fang et al. [14] exploited the time–space correlations of a sequence of consecutive echoes and keystone transform–constant false alarm ratio (KT-CFAR) to maximize the output signal-to-interference plus noise ratio (SINR). Additionally, deep learning was introduced to suppress the radar clutter [26,27,28]. Oliveira and Bekooij [26] introduced the Convolutional Autoencoders (CAE) for denoising Range-Doppler (RD) maps to detect distant pedestrians, showing better performance than the traditional constant false alarm rate (CFAR), especially in highly noisy situations.
Current radar systems and pedestrian detection methods primarily focus on the single-polarization radar, while research on using the fully polarized radar for pedestrian detection is relatively limited. The polarized characteristics of the radar targets are of great importance in enhancing anti-interference capabilities and extracting richer target information [29,30,31], making the fully polarimetric radar increasingly promising in pedestrian detection. Our work is motivated by the need to employ the fully polarimetric radar system for pedestrian detection.
In this paper, a L-band fully polarimetric radar is developed and utilizes a dual-polarized antenna array, supporting both horizontal (H) and vertical (V) polarization modes. The antenna is capable of transmitting and receiving in co-polarized (HH, VV) and cross-polarized (HV, VH) channels, enabling fully polarimetric radar echo measurements. This configuration allows for the extraction of target scattering matrix elements. Furthermore, the clutter suppression method based on fully polarimetric radar echoes has been proposed, integrating the optimal polarization states of antennas and the optimal polarization scattering characteristics of pedestrians. Firstly, the optimal polarization states of the transmitting and receiving antennas are determined to maximize the SCNR. Secondly, the polarization characteristic vector is constructed including the similarity parameters of scattering matrix with cylinders, plates, and dihedrals [32,33], and the optimal fusion coefficients are estimated to maximize the contrast between the pedestrian and background clutter. Finally, the comprehensive function (CF) is established, which combines the optimal polarization states and the optimal polarization scattering characteristics; the clutter signal can be suppressed while retaining the pedestrian radar echo as much as possible, thereby improving the pedestrian detection performance.
The structure of this paper is as follows. Section 2 introduces the L-band fully polarimetric radar designed for pedestrian detection. Section 3 presents the clutter cancellation method based on fully polarimetric radar signal, and the radar signal processing flow is given. Section 4 introduces the details of the OTSU threshold algorithm. Section 5 shows the field experiment and results. Section 6 is the discussion. Section 7 is the conclusion.
2. L-Band Fully Polarimetric Radar
The L-band fully polarimetric radar is developed for pedestrian detection. As illustrated in Figure 1, the fully polarimetric radar comprises six main modules: a dual-channel signal generator, an RF front-end system, four horn antennas, a dual-channel receiver, a clock module.
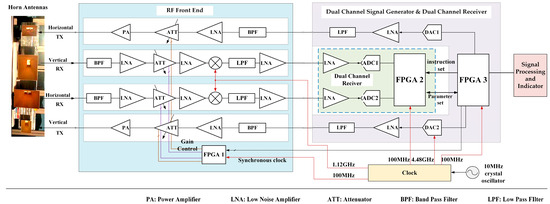
Figure 1.
Block diagram of L-band fully polarimetric radar.
The transmitting antenna is a pair of vertical (V) and horizontal (H) horn antennas with the gain of 10.5 dB, emitting a sequence of up-chirp and down-chirp signals. The dual-channel signal generator produces the up-chirp and down-chirp signals, its center frequency is 1.26 GHz, the bandwidth is 70 MHz, and the time width is 1 us, as shown in Figure 2. The power amplifier in the RF front-end has two modes, output signal power can be set to 10 dBm or 40 dBm, allowing for close-range and long-range detection, respectively.
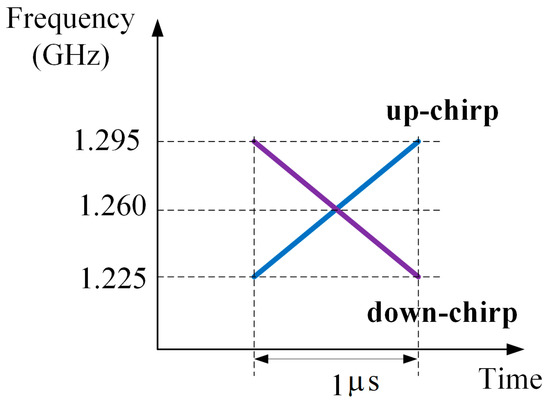
Figure 2.
Up- and down-chirp signals in the time–frequency domain.
The radar echo is received simultaneously by the vertical (V) and horizontal (H) receiving antennas with the gain of 15.5 dB, the receiving time width is 7.5 us. And the isolation between the receiving and the transmitting antenna is 31 dB. The radar echo is then mixed using I/Q demodulation in the RF front-end, producing the intermediate frequency (IF) echo signal; the center frequency of IF echo signal is 140 MHz and the bandwidth is 70 MHz. Subsequently, the IF echo signal is sampled at a sampling frequency of 200 MPS and digitally quantized with a 16-bit resolution. Finally, the fully polarized radar echo HH, HV, VH, and VV can be obtained by the radar signal processing software.
The clock management module is designed to generate different clock signals, serving as the synchronization clock, sampling clock, and FPGA clock. The noise sensitivity of the developed fully polarimetric radar is −90 dBm, and the maximum detection distance of humans is approximately 1 km for the L-band fully polarimetric radar [34]. For more detailed information on the configuration and performance specifications of the L-band fully polarimetric radar system, please refer to [34].
3. Clutter Suppression Method
For the fully polarimetric radar, the vertical (V) and horizontal (H) horn antenna simultaneously transmit up-chirp signal and the down-chirp signal
with positive and negative frequency modulation slopes, expressed as follows:
where and denote the transmitted signals of horizontal and vertical polarization antennas, respectively; is the carrier frequency; is the modulation slope; and is the rectangle function with a pulse duration of .
For a moving target, the scattering matrix is a function of time, denoted as :
is the scattering coefficient, where Y represents the transmitting polarization state and X represents the receiving polarization state. The scattering coefficient is influenced not only by the physical features of the target, such as its material, shape, size, structure, etc., but also by the attitude angle, position of the target, as well as the operating frequency of the radar [35].
At the receiver, the target echo is collected by the horizontal and vertical horn antennas at the same time. Assuming the time delay is and the Doppler shift is , the received signal is expressed as follows:
where and denote the received signals of horizontal and vertical polarization antennas, respectively. Noise signal also includes horizontally polarized noise and vertically polarized noise , and . Equation (3) suggests that the horizontally polarized received signal contains contributions from both HH and HV polarization states, and the same is true for , which contains contributions from both VH and VV polarizations.
The up-chirp signal and the down-chirp signal are orthogonal and independent. Therefore, after I/Q demodulating and matched filter, the fully polarized radar echoes could be extracted from and :
Once full-polarimetric radar signals are obtained as Figure 3, the scattering matrix of the target can be estimated. The total power span of the full polarized radar echo is calculated as follows:
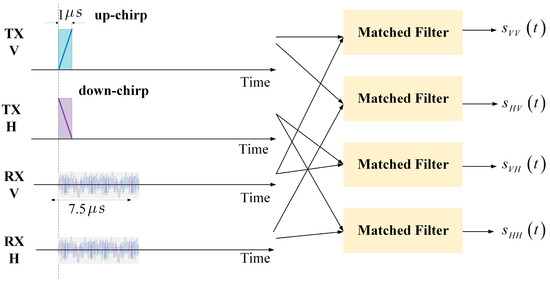
Figure 3.
Full-polarimetric radar signal.
3.1. Optimal Polarization States
The radar echo includes not only the interested target signal generated by the pedestrian, but also the unwanted clutter generated by various ground objects around the target, such as trees, buildings, fences, and so on. Suppose that denotes the scattering matrix of the pedestrian, denotes the scattering matrix of the clutter. Hence, the Kennaugh matrix K is derived from [36]. So, we can get the Kennaugh matrices of the pedestrian and the clutter and based on the scatter matrices and .
Then, the polarization state of the transmitting antenna is represented as and the polarization state of the receiving antenna is represented as . Thus, the received signal power P is expressed as follows:
Consequently, the SCNR is defined as
Here, the goal is to find the optimal polarization states and to maximize the SCNR, the mathematical model is established as follows:
In Equation (8), polarization states of the transmitter and the receiver are independent variables, an effective numerical method in [37] is adopted to estimate the optimal polarization states and .
3.2. Optimal Scattering Characteristic Fusion
In general, the scattering characteristics of irregular targets are complex [30,32]. For the pedestrian, the scattering contributions arise from a short thin cylinder, direct reflection of plates, double reflections of a dihedral corner, and multiple reflections between pedestrian and ground. Yang et al. proposed the similarity parameter between the scattering matrices of two targets, quantifying the scattering component ratio of the complex target [33,35].
First, the orientation angle of the target is estimated based on the Huyen decomposition [35]. The scattering matrix where its orientation angle equals zero is derived by rotating the scattering matrix as [35]. Then, the similarity parameters can be calculated as follows:
- (1)
- The similarity parameter between the target and a short thin cylinder is defined as
- (2)
- The similarity parameter between the target and a plate is defined as
- (3)
- The similarity parameter between the target and a dihedral corner is defined as
What is of interest now is to estimate the optimal weight for fusing the similarity parameters , and of the target and clutter, maximizing the contrast between the pedestrian and clutter. Suppose that the pedestrian target is A and the clutter signal is B, the similarity coefficient vector of the pedestrian A is , and the similarity coefficient vector of the clutter B is ; the fusion parameters are defined as . The contrast R is the ratio of weighted similarity parameters of pedestrian to clutter:
where and . The square of the weighted similarity parameters ensures that R is greater than 0.
To maximize the contrast R, the objective is to find the optimal fusion coefficient vector ; the mathematical model is formulated as follows:
is solved by the generalized eigenvalue problem, which is the normalized eigenvector corresponding to the largest eigenvalue .
3.3. Comprehensive Clutter Suppression Processing Flow
The clutter suppression processing flow of full polarization radar echo is summarized as Figure 4. The comprehensive function CF combining optimal polarization states and the optimal scattering characteristic fusion is defined as follows:
where is the similarity coefficient vector of the target, and is the weighted fusion parameter, so denotes the optimal scattering characteristic fusion. and are the polarization state of the transmitting antenna and the receiving antenna, K is the Kennaugh matrix of the target, so denotes the optimal polarization states. Based on Equation (14), the comprehensive function of the pedestrian target is and the comprehensive function of the clutter is . Hence, maximizing the contrast between the pedestrian and clutter is modeled as follows:
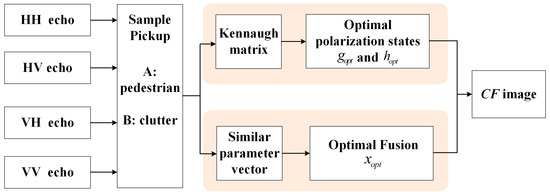
Figure 4.
The flowchart of clutter suppression method.
In (15), the optimal polarization states of antennas and the polarization scattering characteristics of the target are independent, so and can be determined using the iterative method in [38], and can be estimated based on the generalized eigenvalue problem. The comprehensive contrast between the pedestrian and clutter reaches its maximum, thereby improving the SCNR.
4. OTSU Threshold Algorithm
In this paper, the OTSU threshold algorithm [39] is employed for the radar echo intensity map after clutter suppression processing. As an image segmentation technique based on maximizing inter-class variance, the OTSU thresholding algorithm determines the optimal segmentation threshold by maximizing the inter-class variance, effectively distinguishing the target from background clutter. In contrast to the traditional CFAR algorithm, the Otsu method determines the threshold without relying on clutter statistical modeling. It offers the advantages of robust performance and low computational complexity, making it particularly well-suited for target detection tasks in radar systems with low signal-to-noise ratios and large-scale data [40].
Let I represent the normalized radar echo intensity map. The map I is then divided into L levels based on the intensity values. Intensity variation range ; denotes the number of pixels with level . Based on Equations (16) and (17), the total number of pixels N in the radar echo intensity map and the probability of occurrence of each level can be calculated.
The OTSU algorithm is then applied to segment the radar image into two classes: target and background . Based on the principle of maximizing inter-class variance , the optimal threshold is selected. This threshold is then applied to obtain the target detection result t.
Detailed equations for computing the pixel probabilities, class means, and inter-class variance follow standard OTSU formulation [39]. The OTSU algorithm achieves optimal target and background segmentation by traversing all possible thresholds and selecting the threshold that maximizes the inter-class variance. This method offers the advantages of low computational complexity and high robustness, making it well-suited for large-scale target detection tasks.
5. Field Experiment and Results
5.1. Experimental Scene Setting
The pedestrian detection experiment used by the L-band fully polarimetric radar is carried out in Beijing, China. The experiment scene is illustrated in Figure 5. The radar system is placed in Building I at a height of 20 m from the ground, and the target of interest is a man in front of Building II. The pedestrian moves back and forth in a straight line at a speed of about 1 m/s.
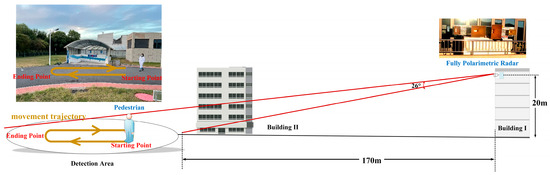
Figure 5.
The experiment scene for pedestrian detection.
The radar echoes received by horizontal and vertical antennas and are filtered by the bandpass filter with the cutoff frequency and , eliminating the out-of-band noise. After matched filter, the fully polarimetric radar echoes HH, HV, VH, and VV are extracted from the received signal, demonstrated in Figure 6. The B-scan in Figure 6 is a data matrix with the slant range along each column and the slow time along each row, and the radar data in each column are normalized. These results indicate that, irrespective of the polarization type, the clutter signal generated by the building is large enough to submerge the pedestrian echo, making it impossible to detect the pedestrian directly.
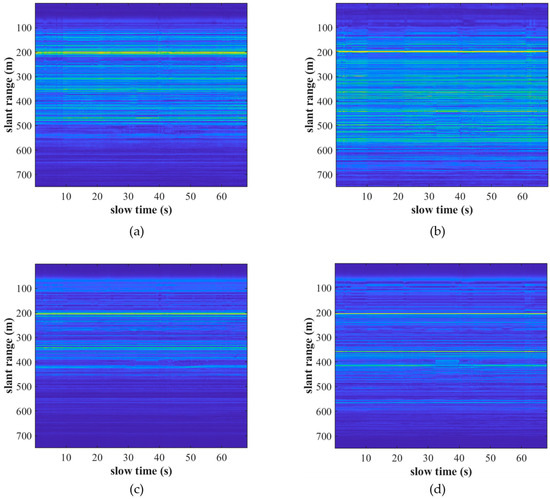
Figure 6.
The fully polarimetric radar echoes. (a) HH polarization. (b) HV polarization. (c) VH polarization. (d) VV polarization.
Next, MTI is applied to remove the static clutter, the fully polarized radar echoes of the pedestrian are displayed in Figure 7. In HH and HV polarizations, the pedestrian echo is still buried in clutter signals, the movement of the man cannot be observed from Figure 7a,b. In contrast, the trajectory of the man is clear in VH and VV polarizations, indicating that the man starts moving from 10 s to 32 s, remains stationary from 32 s to 43 s, and returns to the starting point from 43 s to 64 s, which is consistent with the actual movement of the pedestrian in the experiment. In addition, the VH polarized echo has the highest SCNR: SCNR = 23 dB. Comparison between Figure 6 and Figure 7 confirms that the background clutter is significantly eliminated after MTI and the trajectory of the pedestrian becomes much clearer, particularly for the VH polarized signal. However, there are still a lot of residual clutters, and the residual clutter is non-stationary, generated from the environment and interference signals generated by multipath effects, deteriorating the pedestrian detection performance.
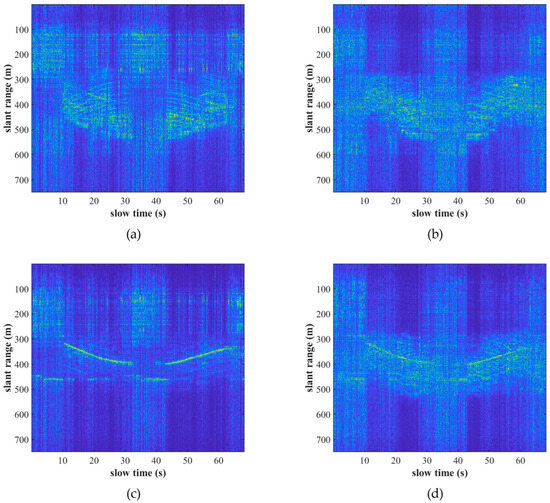
Figure 7.
The fully polarimetric radar echoes after MTI. (a) HH. (b) HV. (c) VH. (d) VV.
5.2. Clutter Suppression Performance Analysis
The total power signal span is derived from fully polarized echoes, as demonstrated in Figure 8. The SCNR of the total power signal is 35 dB which is higher than that of any single-polarization echo. The polarization radar echo energy is able to improve the SCNR, providing better performance. But the clutter signals with different polarizations are also superimposed, and clutter caused by multipath effects still exists.
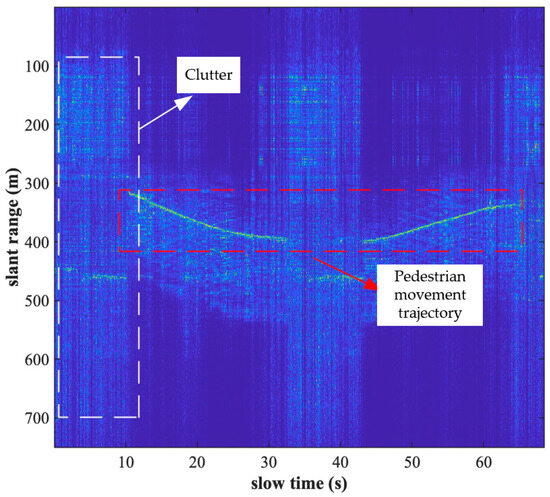
Figure 8.
The span image.
Then, the proposed clutter suppression method is applied to eliminate the clutter. The pedestrian sample A is picked up from the moving track, obtaining the scattering matrix of the pedestrian , and the clutter sample B is selected from the background area, obtaining the scattering matrix of clutter . Then, we can calculate the Kennaugh matrices of the pedestrian and clutter ; the optimal polarization states of transmitting and receiving antennas and are estimated by the numerical iteration in [38] to maximize the SCNR. On the other hand, the similarity parameters of pedestrian and clutter , are derived from scattering matrix, the optimal fused coefficients are solved using the normalized eigenvector corresponding to the largest eigenvalue.
The optimization parameters of the clutter suppression method are summarized in Table 1. Finally, the comprehensive function CF after clutter suppression is given in Figure 9, demonstrating that the clutter signal is suppressed significantly by combining the optimal polarization states and polarization scattering characteristics. In comparison to Figure 8 and Figure 9, most of the non-stationary clutter and radar echo generated by multipath effects is eliminated, while the motion trajectory of the target is preserved. Figure 10 presents the distribution of clutter of span image and CF image. The mean of relative clutter’s relative power value is 2.91 × , the relative power fluctuation range of the clutter signal is from 1.06 to 5.6 × , while the CF values of the clutter are concentrated in a very small range, and most of them are less than 0.3. It implies that the proposed clutter suppression method is able to reduce the clutter energy.

Table 1.
The optimization parameters of the clutter suppression method.
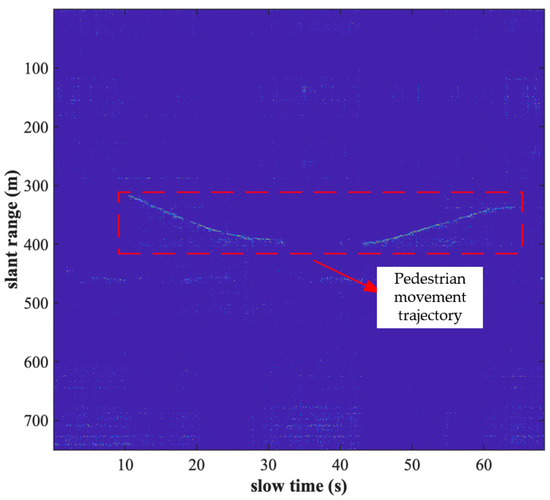
Figure 9.
The CF image.
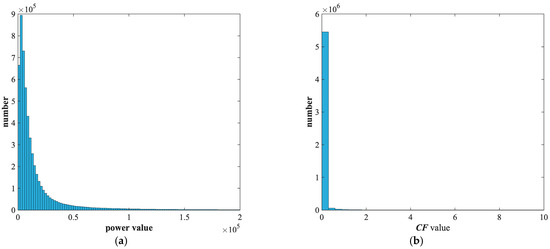
Figure 10.
The distribution of clutter. (a) Power signal span. (b) CF value.
Table 2 compares the SCNR of the raw radar signal and the radar signal after clutter suppression. The SCNR of the CF image is 42 dB, which is much higher than single-polarization echo signal and power signal. The detection results validate that full polarization radar outperforms the single-polarization radar. Clutter suppression is significantly improved through the fusion of fully polarimetric radar data, leading to a higher SCNR.
Table 2.
SCNR comparison of radar echo.
5.3. Detection Performance Analysis
In order to evaluate the impact of the clutter suppression algorithm on the performance of pedestrian target detection, the total power signal span and the clutter suppression result CF are processed by the OTSU algorithm, and the obtained detection results are analyzed. The corresponding experimental results are presented in Figure 11.
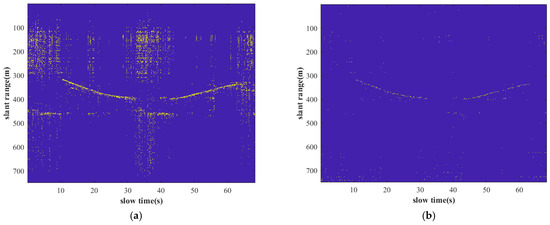
Figure 11.
OTSU detection results. (a) OTSU detection result of span image. (b) OTSU detection result of CF image.
Although the ground truth of the target detection results is unavailable, a comparative analysis of the two experimental outcomes in Figure 11 indicates that the target detection result using the span image as input retains the basic target information while also mistakenly detecting a considerable amount of background clutter. This residual clutter can significantly degrade the clarity and completeness of the target representation, which may adversely affect subsequent tasks. On the contrary, as shown in Figure 11b, the detection result with the CF image as input shows better detection performance, target information is relatively complete, and the background clutter pixels are significantly reduced, effectively achieving clutter suppression. Overall, the above experimental results demonstrate that the proposed algorithm is able to effectively suppress clutter interference and enhance the contrast between pedestrian targets and background clutter, thereby improving target detection performance in complex scenes.
5.4. Multi-Target Experimental Results
To evaluate the generalization and effectiveness of the proposed clutter suppression algorithm in complex scenarios, we conducted a multi-target detection experiment using an L-band fully polarimetric radar system. The experiment setup was consistent with that of the single-target detection experiment, and two pedestrians moved back and forth along the road, simulating a typical dynamic multi-target scene. First, MTI techniques were applied to extract the motion information of the targets. As shown in Figure 12, the MTI results from the HH, VH, and VV polarizations clearly show that two radar targets are moving simultaneously, indicating the presence of multiple dynamic targets in the scene.
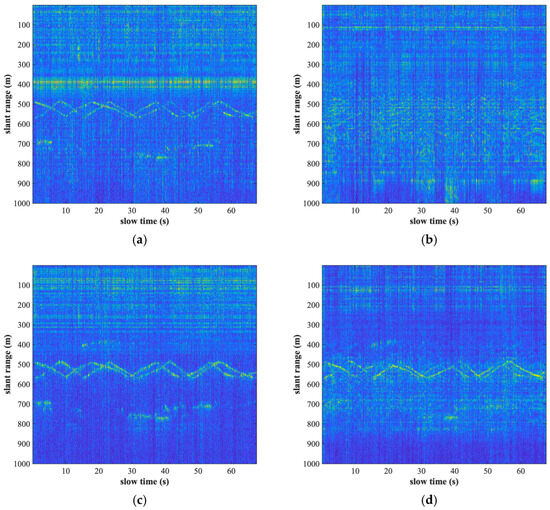
Figure 12.
Fully polarimetric radar echoes of multi-target scenario after MTI. (a) HH. (b) HV. (c) VH. (d) VV.
Then, the total power of the fully polarimetric radar echoes span is derived, as illustrated in Figure 13a, and the proposed clutter suppression method is applied to eliminate background interference. The processing procedure is consistent with that described earlier: one point is randomly selected from the pedestrian’s trajectory to estimate the target scattering matrix, while another point is selected from the background region to estimate the clutter scattering matrix. The estimated optimal polarization states are expressed as and , and the optimal fused coefficients . Finally, the comprehensive function CF after clutter suppression is shown in Figure 13b. It is evident that the background clutter power is significantly reduced, while the motion trajectories of the two targets are clearly preserved after applying the proposed method. The SCNR in the span image is 11 dB, while the SCNR in the CF image increases to 23 dB, indicating that the proposed clutter suppression method effectively enhances target visibility and improves SCNR in complex environments.
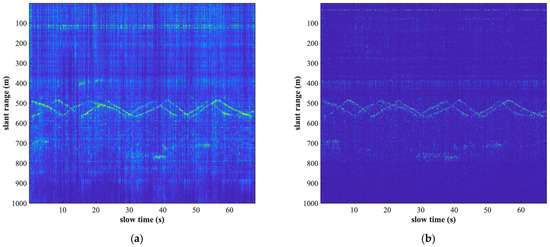
Figure 13.
Clutter suppression results in multi-target scenario. (a) The span image. (b) The CF image.
6. Discussion
6.1. The Effect of L-Band Fully Polarimetric Radar on Pedestrian Detection
The L-band fully polarized radar system utilized in this study offers several advantages for pedestrian detection. One of the primary benefits is the full polarization data acquisition capability. This full-polarimetric capability allows for better discrimination of moving pedestrian targets from background clutter, which is particularly beneficial in complex environments. Furthermore, the L-band radar’s longer wavelength enables improved performance in terms of detection range. The experimental verification results based on the L-band radar system also show that the clutter suppression method proposed in this paper can maintain good performance over long distances and has important application value. Despite these advantages, the L-band radar also presents some limitations. The relatively lower frequency compared to higher bands such as X-band results in lower resolution, which can make distinguishing small or distant pedestrians more challenging. Future research will focus on investigating the impact of radar systems of different frequency bands on the detection of moving pedestrian targets. Additionally, the algorithm will be further improved to more accurately capture target characteristics in real-world environments, thereby enhancing its robustness.
6.2. The Effect of the Clutter Suppression Method on Radar Data
The proposed clutter suppression method demonstrates significant potential in enhancing the detection capability of fully polarimetric radar systems. The method effectively improves the contrast between pedestrian targets and background clutter, which is quantitatively supported by the substantial increase in the SCNR of the CF image, reaching 42 dB compared to 35 dB of the power span image. Such performance gains are of considerable practical value, especially in complex urban scenarios where non-stationary clutter and multipath effects are prevalent. However, one critical observation is that the suppression of clutter may also cause attenuation of target signals, especially for weak or marginal echoes. This suppression effect can result in partial loss of target energy, manifesting as discontinuities in the detected pedestrian trajectory, particularly in regions where the signal is already weak due to occlusions, body posture variations, or multipath interference. In future work, we aim to develop adaptive compensation strategies to address this issue and ensure temporal continuity in trajectory reconstruction.
6.3. The Effect of Target Scattering Feature Simplification
When we perform optimal scattering feature fusion, we regard the moving pedestrian as a fusion of three scatterer types (i.e., cylinders, plates, and dihedral corners) and construct the similarity parameter. While this simplification facilitates efficient feature construction and contrast enhancement, the actual electromagnetic scattering from the human target is often far more complex, such as micro-Doppler effects. This effect can provide time–frequency information with high discriminative power to distinguish human targets from background clutter or static objects. However, we currently fail to fully utilize these dynamic features. As such, although the proposed approach achieves promising results in the experimental scenario of this paper, its generalization to dynamic and diverse pedestrian postures remains limited. To address this, future work will focus on enhancing the physical realism of the scattering model. One potential approach is to incorporate micro-Doppler analysis into the feature space, enabling differentiation of human motion signatures from static background. Additionally, extending the current scattering vector representation to include phase, coherence, or entropy-based descriptors may further improve the robustness of target characterization. These methods can capture higher-order statistical and spatial–temporal features, enhancing detection robustness in real-world applications.
6.4. Discussion on the Manual Initialization Step for Scattering Matrix Estimation
For the proposed clutter suppression method, the initial step involves manually and randomly selecting one pedestrian target point and one background (clutter) point to estimate their respective scattering matrices. This requirement is reasonable and practical for several reasons. First, the method only relies on identifying a single high-SCNR point along the pedestrian trajectory, which is typically feasible even in moderately cluttered environments. In fully polarimetric radar systems, different polarization channels (e.g., HH, HV, VV) exhibit varying target and clutter responses, so locating such a target point under favorable polarization channels is generally not difficult. Similarly, selecting a background point representative of dominant clutter characteristics is straightforward in most radar scenarios, especially when prior knowledge or auxiliary data (e.g., terrain maps) are available. In cases where the SCNR is extremely low across all polarization channels and the target location cannot be directly estimated, frequency-domain analysis or trajectory association methods may be employed to identify the target point, enabling the subsequent application of the proposed clutter suppression approach.
7. Conclusions
In this work, L-band fully polarimetric radar is developed for pedestrian detection, and a novel clutter suppression method based on HH, HV, VH, and VV polarized radar echoes is proposed to improve the SCNR, showing better detection performance on urban roads.
Field experiments verified that fully polarimetric radar has superiority over traditional single-polarization radar in the following aspects:
- (1)
- HH, HV, VH, and VV polarized radar echoes provide a richer amount of information.
- (2)
- The SCNR of the total power signal span of full-polarization echoes is higher than that of single-polarization echoes.
- (3)
- The proposed clutter suppression method combines the optimal polarization state of antennas and the target’s optimal scattering characteristics, which is able to reduce the non-stationary clutter and the echo generated by multipath effects, improving the SCNR and enhancing pedestrian detection performance.
In future research, we will focus on the classification, recognition, and tracking of moving targets using the full-polarimetric radar.
Author Contributions
Conceptualization, Z.Z.; design and implementation of radar systems, Z.Z., C.X., Z.C. and X.H.; methodology, Z.W., C.X. and Z.C.; validation, X.L.; writing—original draft preparation, Y.M.; writing—review and editing, H.Z., Z.L. and Z.X. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported by the Youth Top Notch Talent Project of China Aerospace Science and Technology Corporation (Grant 2024XS-12-509), National Natural Science Foundation of China (Grant 62201069), Beijing Information Science and Technology University Grant (2021XJJ22).
Data Availability Statement
The original contributions presented in this study are included in the article. Further inquiries can be directed to the corresponding author.
Conflicts of Interest
The authors declare that this study received funding from China Aerospace Science and Technology Corporation. The funder was not involved in the study design, collection, analysis, interpretation of data, the writing of this article or the decision to submit it for publication. Furthermore, the authors declare that they have no commercial or financial relationships that could be construed as a potential conflict of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| FMCW | Frequency Modulated Continuous Wave |
| RCS | Radar Cross Section |
| SCNR | Signal-to-Clutter-Plus-Noise Ratio |
| MTI | Moving Target Indication |
| AMTI | Adaptive MTI |
| LMS | Least Mean Square |
| SFRAF | Sparse Fractional Ambiguity Function |
| STAP | Space-Time Adaptive Processing |
| KT-CFAR | Keystone Transform-Constant False Alarm Ratio |
| SINR | Signal-to-Interference Plus Noise Ratio |
| CAE | Convolutional Autoencoders |
| RD | Range-Doppler |
| CFAR | Constant False Alarm Ratio |
| H | Horizontal |
| V | Vertical |
| CF | Comprehensive Function |
References
- Wachtel, D.; Rothmeier, T.; Bussche, T.v.d.; Huber, W.; Vossiek, M. Radar in the Rain: Understanding and Simulating Environmental Effects on ADAS Radar Sensors. In Proceedings of the 2024 IEEE Radar Conference (RadarConf24), Denver, CO, USA, 6–10 May 2024; pp. 1–6. [Google Scholar]
- Tavanti, E.; Rizik, A.; Fedeli, A.; Caviglia, D.D.; Randazzo, A. A Short-Range FMCW Radar-Based Approach for Multi-Target Human-Vehicle Detection. IEEE Trans. Geosci. Remote Sens. 2022, 60, 2003816. [Google Scholar] [CrossRef]
- Sun, S.; Petropulu, A.P.; Poor, H.V. MIMO Radar for Advanced Driver-Assistance Systems and Autonomous Driving: Advantages and Challenges. IEEE Signal Process Mag. 2020, 37, 98–117. [Google Scholar] [CrossRef]
- Held, P.; Steinhauser, D.; Koch, A.; Brandmeier, T.; Schwarz, U.T. A Novel Approach for Model-Based Pedestrian Tracking Using Automotive Radar. IEEE Trans. Intell. Transp. Syst. 2022, 23, 7082–7095. [Google Scholar] [CrossRef]
- Ramchandani, M.; Sahu, S.P.; Dewangan, D.K. A Comparative Study in Pedestrian Detection for Autonomous Driving Systems. In Proceedings of the 2022 OPJU International Technology Conference on Emerging Technologies for Sustainable Development (OTCON), Raigarh, India, 8–10 February 2023; pp. 1–6. [Google Scholar]
- Steinhauser, D.; Held, P.; Thöresz, B.; Brandmeier, T. Towards Safe Autonomous Driving: Challenges of Pedestrian Detection in Rain with Automotive Radar. In Proceedings of the 2020 17th European Radar Conference (EuRAD), Utrecht, The Netherlands, 10–15 January 2021; pp. 409–412. [Google Scholar]
- Jeon, S.Y.; Kim, S.; Kim, J.; Kim, S.; Shin, S.; Kim, M.; Ka, M.H. W-Band FMCW MIMO Radar System for High-Resolution Multimode Imaging With Time- and Frequency-Division Multiplexing. IEEE Trans. Geosci. Remote Sens. 2020, 58, 5042–5057. [Google Scholar] [CrossRef]
- Cui, H.; Dahnoun, N. High Precision Human Detection and Tracking Using Millimeter-Wave Radars. IEEE Aerosp. Electron. Syst. Mag. 2021, 36, 22–32. [Google Scholar] [CrossRef]
- Han, K.; Hong, S. Detection and Localization of Multiple Humans Based on Curve Length of I/Q Signal Trajectory Using MIMO FMCW Radar. IEEE Microw. Wirel. Compon. Lett. 2021, 31, 413–416. [Google Scholar] [CrossRef]
- Sun, R.; Suzuki, K.; Owada, Y.; Takeda, S.; Umehira, M.; Wang, X.; Kuroda, H. A millimeter-wave automotive radar with high angular resolution for identification of closely spaced on-road obstacles. Sci. Rep. 2023, 13, 3233. [Google Scholar] [CrossRef]
- Duan, Z.; Wu, B.; Wang, Y.; Fang, Y.; Li, Y.; Wu, Y.; Zhang, T.; Zhu, C.; Dai, Y.; Sang, L.; et al. A 76–81 GHz 2×8 MIMO Radar Transceiver with Broadband Fast Chirp Generation and 16-Antenna-in-Package Virtual Array. IEEE J. Solid-St. Cir. 2023, 58, 3103–3112. [Google Scholar] [CrossRef]
- Manzoni, M.; Tebaldini, S.; Monti-Guarnieri, A.V.; Prati, C.M. Multipath in Automotive MIMO SAR Imaging. IEEE Trans. Geosci. Remote Sens. 2023, 61, 5202612. [Google Scholar] [CrossRef]
- Balashova, D.M.; Burov, V.N.; Kuzin, A.A.; Mihaylov, A.D.; Myakinkov, A.V.; Fadeev, R.S.; Shabalin, S.A.; Fomina, K.S. Technique of beam forming for the radar of railway crossing control. AIP Conf. Proc. 2023, 2605, 020004. [Google Scholar] [CrossRef]
- Fang, X.; Li, J.; Zhang, Z.; Xiao, G. FMCW-MIMO Radar-Based Pedestrian Trajectory Tracking Under Low- Observable Environments. IEEE Sens. J. 2022, 22, 19675–19687. [Google Scholar] [CrossRef]
- Will, C.; Vaishnav, P.; Chakraborty, A.; Santra, A. Human Target Detection, Tracking, and Classification Using 24-GHz FMCW Radar. IEEE Sens. J. 2019, 19, 7283–7299. [Google Scholar] [CrossRef]
- Zhang, Z.; Wang, X.; Huang, D.; Fang, X.; Zhou, M.; Zhang, Y. MRPT: Millimeter-Wave Radar-Based Pedestrian Trajectory Tracking for Autonomous Urban Driving. IEEE Trans. Instrum. Meas. 2022, 71, 8000117. [Google Scholar] [CrossRef]
- Etinger, A.; Balal, N.; Litvak, B.; Einat, M.; Kapilevich, B.; Pinhasi, Y. Non-Imaging MM-Wave FMCW Sensor for Pedestrian Detection. IEEE Sens. J. 2014, 14, 1232–1237. [Google Scholar] [CrossRef]
- López-Valcárcel, L.A.; Sánchez, M.G.; Fioranelli, F.; Krasnov, O.A. An MTI-Like Approach for Interference Mitigation in FMCW Radar Systems. IEEE Trans. Aerosp. Electron. Syst. 2024, 60, 1985–2000. [Google Scholar] [CrossRef]
- Goncharenko, Y.V.; Farquharson, G.; Gorobets, V.; Gutnik, V.; Tsarin, Y. Adaptive moving target indication in a windblown clutter environment. IEEE Trans. Aerosp. Electron. Syst. 2014, 50, 2989–2997. [Google Scholar] [CrossRef]
- Jin, F.; Cao, S. Automotive Radar Interference Mitigation Using Adaptive Noise Canceller. IEEE Trans. Veh. Technol. 2019, 68, 3747–3754. [Google Scholar] [CrossRef]
- Chen, X.; Yu, X.; Huang, Y.; Guan, J. Adaptive Clutter Suppression and Detection Algorithm for Radar Maneuvering Target With High-Order Motions Via Sparse Fractional Ambiguity Function. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 1515–1526. [Google Scholar] [CrossRef]
- Yu, J.; Krolik, J. MIMO multipath clutter mitigation for GMTI automotive radar in urban environments. In Proceedings of the IET International Conference on Radar Systems (Radar 2012), Glasgow, UK, 22–25 October 2012; pp. 1–5. [Google Scholar]
- Uysal, F.; Sanka, S. Mitigation of automotive radar interference. In Proceedings of the 2018 IEEE Radar Conference (RadarConf18), Oklahoma City, OK, USA, 23–27 April 2018; pp. 0405–0410. [Google Scholar]
- Correas-Serrano, A.; Gonzalez-Huici, M.A. Sparse Reconstruction of Chirplets for Automotive FMCW Radar Interference Mitigation. In Proceedings of the 2019 IEEE MTT-S International Conference on Microwaves for Intelligent Mobility (ICMIM), Detroit, MI, USA, 15–16 April 2019; pp. 1–4. [Google Scholar]
- Wu, J.; Yang, S.; Lu, W.; Liu, Z. Iterative modified threshold method based on EMD for interference suppression in FMCW radars. IET Radar Sonar Navig. 2020, 14, 1219–1228. [Google Scholar] [CrossRef]
- Oliveira, M.L.L.d.; Bekooij, M.J.G. Deep Convolutional Autoencoder Applied for Noise Reduction in Range-Doppler Maps of FMCW Radars. In Proceedings of the 2020 IEEE International Radar Conference (RADAR), Washington, DC, USA, 28–30 April 2020; pp. 630–635. [Google Scholar]
- Rock, J.; Toth, M.; Meissner, P.; Pernkopf, F. Deep Interference Mitigation and Denoising of Real-World FMCW Radar Signals. In Proceedings of the 2020 IEEE International Radar Conference (RADAR), Washington, DC, USA, 28–30 April 2020; pp. 624–629. [Google Scholar]
- Mun, J.; Ha, S.; Lee, J. Automotive Radar Signal Interference Mitigation Using RNN with Self Attention. In Proceedings of the ICASSP 2020—2020 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Barcelona, Spain, 4–8 May 2020; pp. 3802–3806. [Google Scholar]
- Tinti, A.; Alfageme, S.T.; Biarge, S.D.; Balcells-Ventura, J.; Pohl, N. Fully Polarimetric Automotive Radar: Proof of Concept. IEEE Trans. Radar Syst. 2024, 2, 645–660. [Google Scholar] [CrossRef]
- Raney, R.K. Radar Polarimetry: Classical Versus Quad-Pol Methodologies. IEEE Geosci. Remote Sens. Lett. 2024, 21, 4002204. [Google Scholar] [CrossRef]
- Aldhubaib, F.; Shuley, N.V. Radar Target Recognition Based on Modified Characteristic Polarization States. IEEE Trans. Aerosp. Electron. Syst. 2010, 46, 1921–1933. [Google Scholar] [CrossRef]
- Yang, J.; Peng, Y.-N.; Lin, S.-M. Similarity between two scattering matrices. Electron. Lett. 2001, 37, 193–194. [Google Scholar] [CrossRef]
- Yang, J.; Zhang, H.; Yamaguchi, Y. GOPCE-Based Approach to Ship Detection. IEEE Geosci. Remote Sens. Lett. 2012, 9, 1089–1093. [Google Scholar] [CrossRef]
- Zhang, C.; Mu, Y.; Xia, Z.; Jin, S.; Yue, F.; Liu, X.; Zhang, L.; Tian, Z.; Liu, Z.; Zhang, Y.; et al. Feature Extraction for Moving Targets Based on the Statistical Characteristics of Echo Amplitude with the L-Band Fully Polarimetric Radar. Remote Sens. 2023, 15, 80. [Google Scholar] [CrossRef]
- Huynen, J.R. Measurement of the target scattering matrix. Proc. IEEE 1965, 53, 936–946. [Google Scholar] [CrossRef]
- Guissard, A. Mueller and Kennaugh matrices in radar polarimetry. IEEE Trans. Geosci. Remote Sens. 1994, 32, 590–597. [Google Scholar] [CrossRef]
- Jian, Y.; Yamaguchi, Y.; Boerner, W.M.; Lin, S. Numerical methods for solving the optimal problem of contrast enhancement. IEEE Trans. Geosci. Remote Sens. 2000, 38, 965–971. [Google Scholar] [CrossRef]
- Ghojogh, B.; Karray, F.; Crowley, M. Eigenvalue and generalized eigenvalue problems: Tutoria. arXiv 2019, arXiv:1903.11240. [Google Scholar]
- Otsu, N. A threshold selection method from gray-level histograms. IEEE Trans. Syst. Man Cybern. 1979, 9, 62–66. [Google Scholar] [CrossRef]
- Xu, J.; Liu, P.; Wang, H.; Lian, J.; Li, B. Marine Radar Oil Spill Monitoring Technology Based on Dual-Threshold and C–V Level Set Methods. J. Indian Soc. Remote Sens. 2018, 46, 1949–1961. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).