
Urban Expansion Scenario Prediction Model: Combining Multi-Source Big Data, a Graph Attention Network, a Vector Cellular Automata, and an Agent-Based Model



Abstract
1. Introduction
2. Study Area and Data
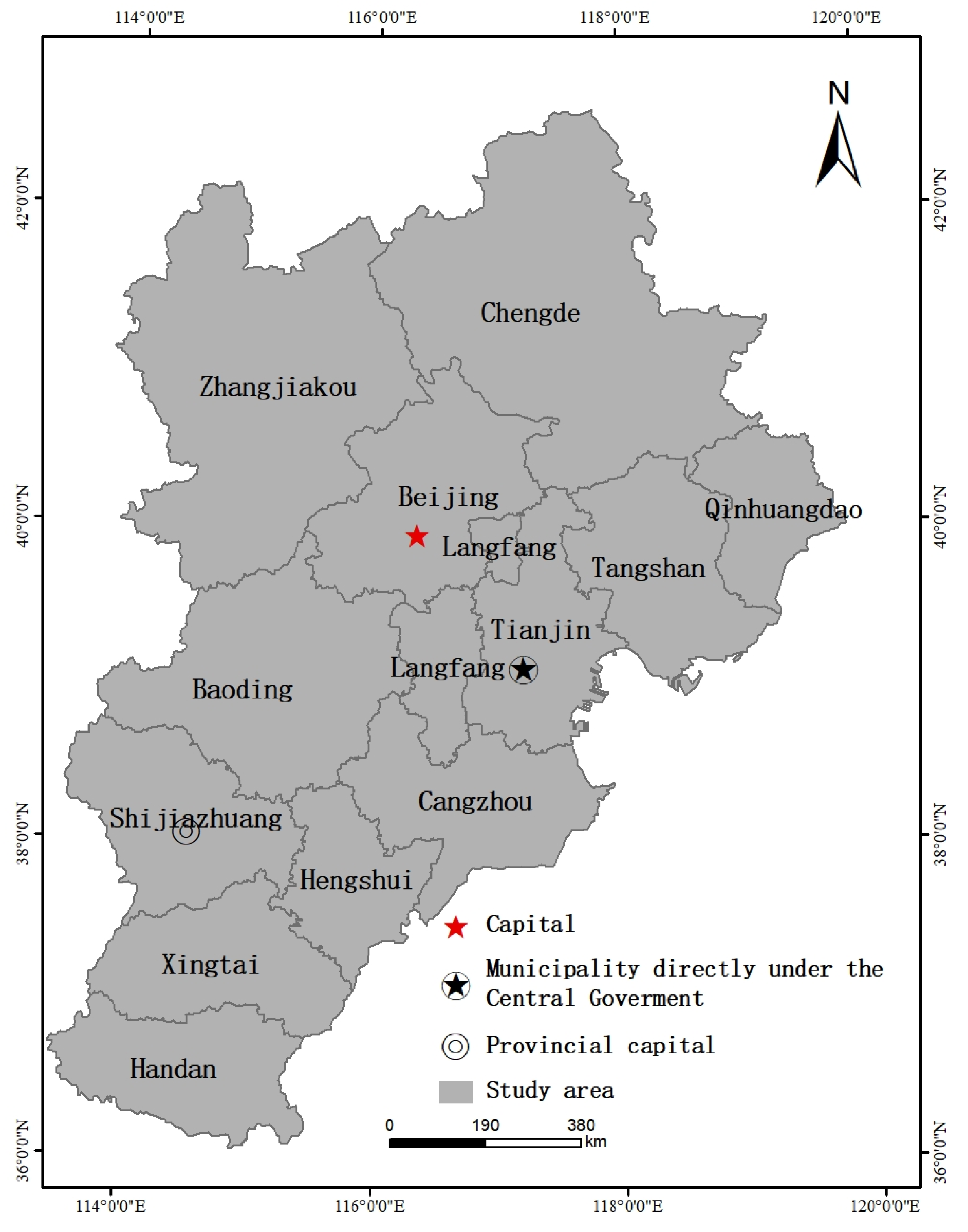
2.1. Study Area
2.2. Data
3. Methodology
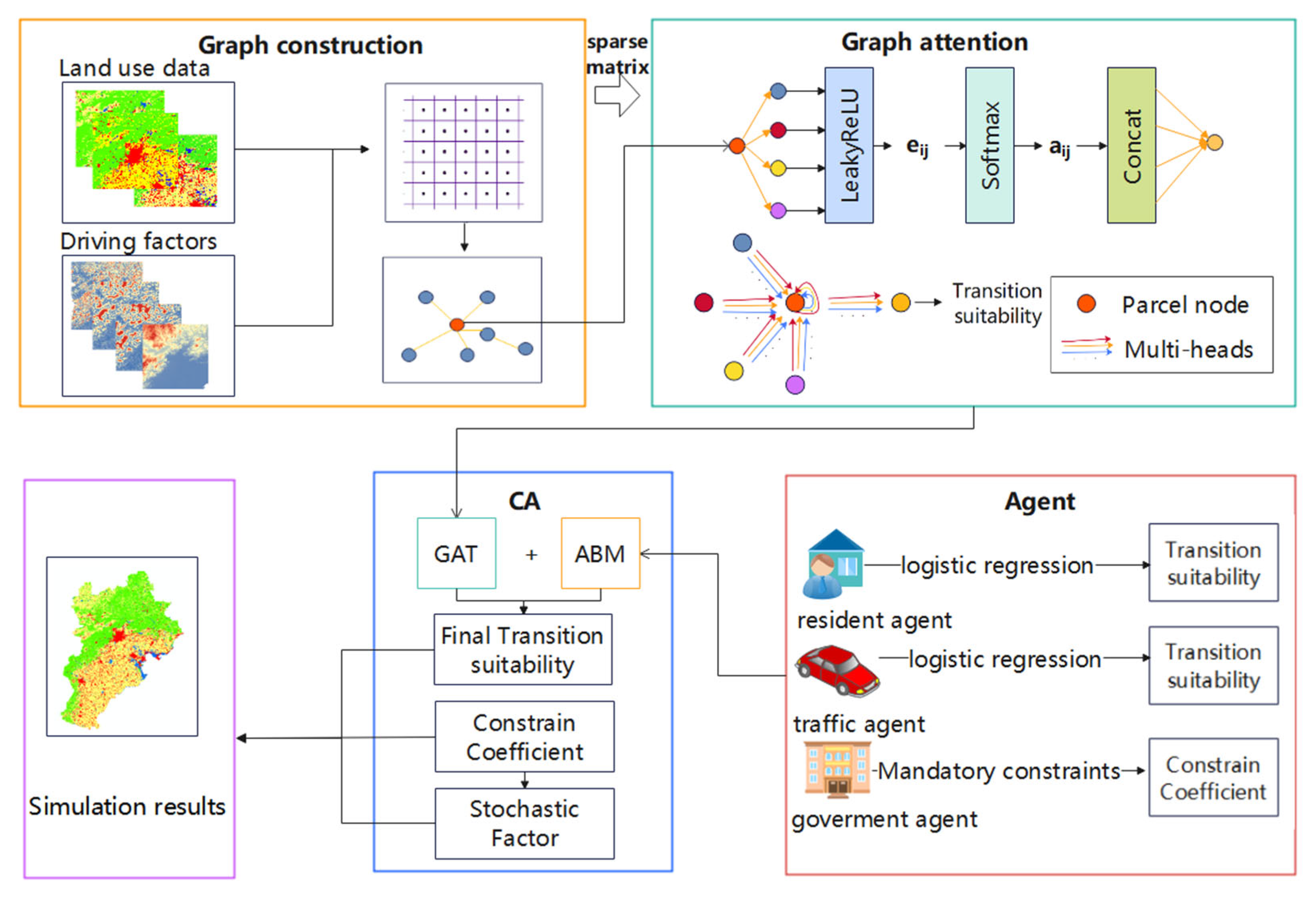
3.1. Overview
3.2. GAT-VCA-ABM
3.2.1. GAT
- (1)
- Graph structure construction
- (2)
- Graph Attention Operation
3.2.2. ABM
3.2.3. UESP Model Construction
- (1)
- CA
- (2)
- VCA
3.3. Accuracy Assessment
4. Results
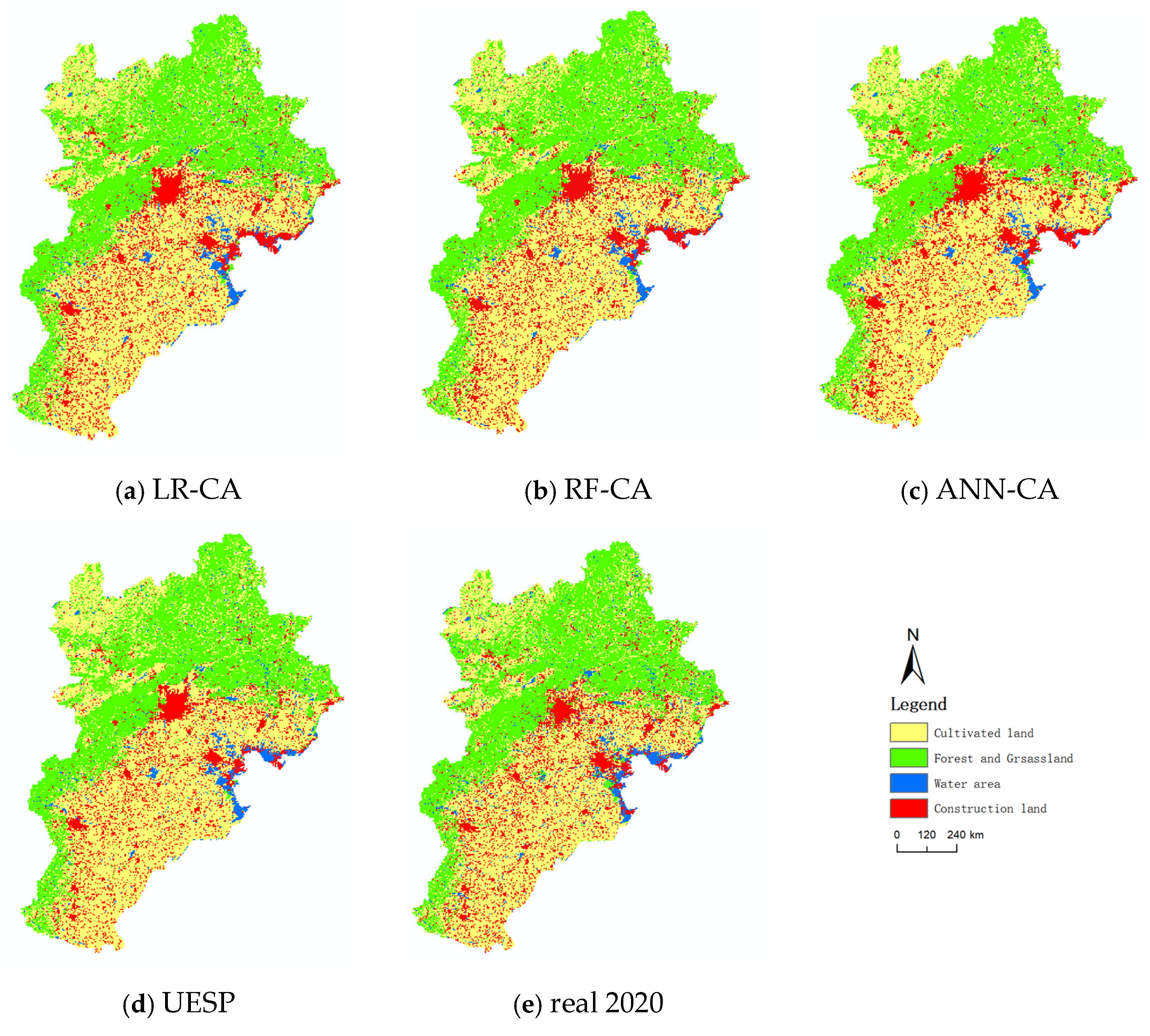
4.1. Application of Model and Results
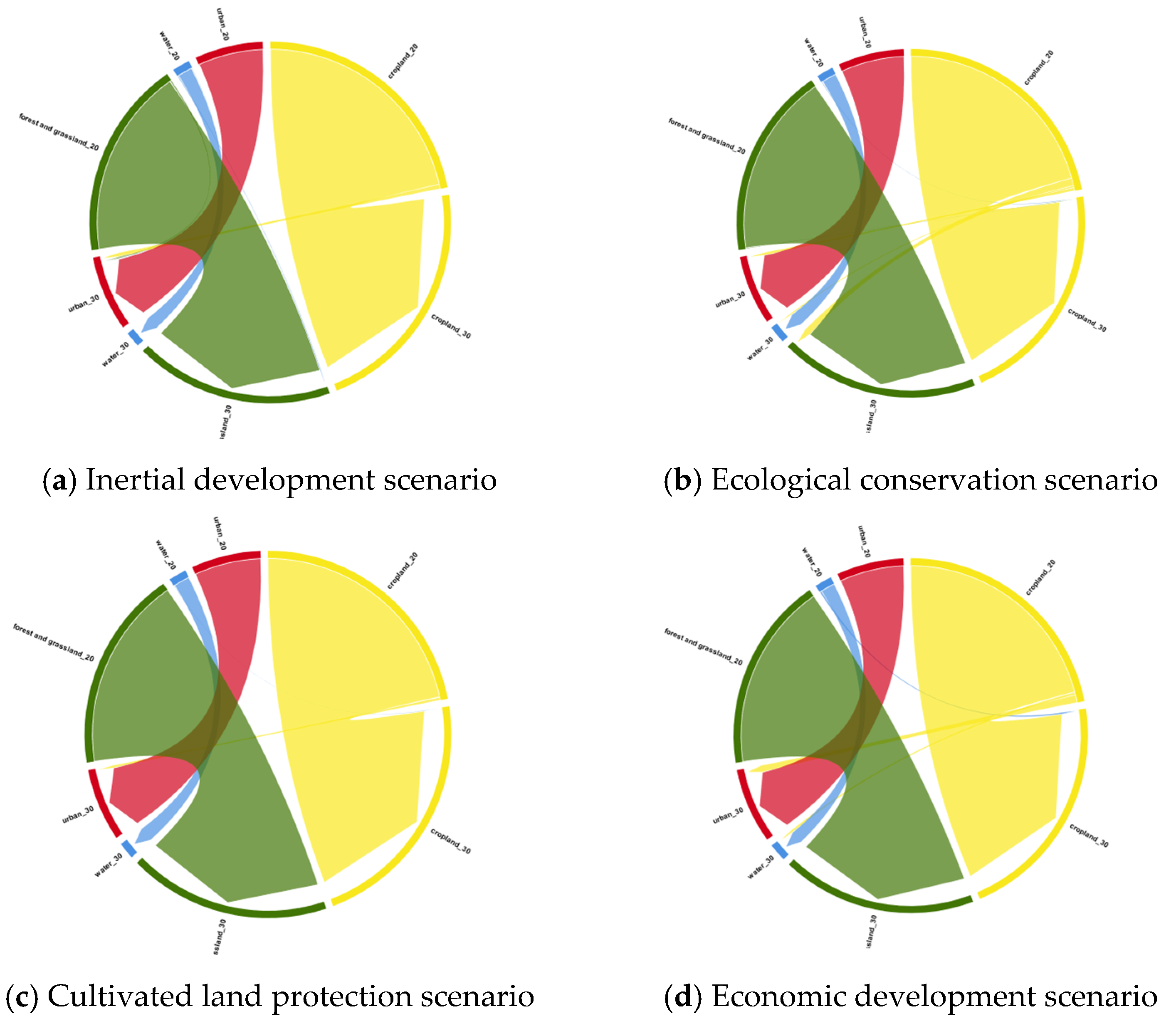
4.2. Future Scenario Simulation
5. Discussion
5.1. Analysis of Differences in Simulations of Different Scenarios
5.2. Policy Implications
5.3. Uncertainty and Limitations
- (1)
- Policy unpredictability in China:
- In practice, land use policies in China often undergo rapid and unexpected changes. The sudden implementation of environmental redlines, urban renewal projects, or demolition policies can significantly alter urban expansion trends. These abrupt policy shifts are difficult to predict and parameterize within the scenario-based modeling framework.
- (2)
- Simplified representation of human decision-making:
- 2.
- Although the ABM module incorporates agent-level decision rules, these behaviors are simplified and parameterized using aggregated statistical indicators such as GDP, POI density, and accessibility. Such input variables cannot fully capture the nonlinearity, heterogeneity, and contextual dependence of real human decision-making processes, especially under unexpected social, political, or emergency events (e.g., COVID-19 lockdowns or disaster-induced population migration).
- (3)
- Limitations of stochastic disturbance factors:
- 3.
- While stochastic factors are incorporated into the CA transition rules to simulate unknown disturbances in the real world, these random disturbances cannot precisely replicate complex, large-scale external shocks such as pandemics or natural disasters. Therefore, the model’s ability to fully represent sudden and highly dynamic environmental changes remains limited.
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Bren, C.; Femke, R.; Giovanni, B.; Stephan, B.; Burak, G.; Eickemeier, K.-H.; Helmut, H.; Felix, C.; Seto, K.C. Future urban land expansion and implications for global croplands. Proc. Natl. Acad. Sci. USA 2016, 114, 8939–8944. [Google Scholar] [CrossRef]
- Seto, K.C.; Güneralp, B.; Hutyra, L.R. Global forecasts of urban expansion to 2030 and direct impacts on biodiversity and carbon pools. Proc. Natl. Acad. Sci. USA 2012, 109, 16083–16088. [Google Scholar] [CrossRef] [PubMed]
- Wei, Y.D.; Ewing, R. Urban expansion, sprawl and inequality. Landsc. Urban Plan. 2018, 177, 259–265. [Google Scholar] [CrossRef]
- Boahen, S.A.; Asante, R.A.; Agyei, G.; Cobbinah, S.B.; Keil, M.; Eltz, S.; Schopp, J.; Schilling, D. Urbanization, land use transformation and spatio-environmental impacts: Analyses of trends and implications in major metropolitan regions of Ghana. Land Use Policy 2020, 96, 104707. [Google Scholar]
- European Commission. The European Green Deal [COM (2019) 640 Final]; European Commission: Brussels, Belgium, 2019. [Google Scholar]
- Chen, M.; Liu, W.; Liu, D. Challenges and the way forward in China’s new-type urbanization. Land Use Policy 2016, 55, 334–339. [Google Scholar] [CrossRef]
- Fang, C. Important progress and future direction of studies on China’s urban agglomerations. J. Geogr. Sci. 2015, 25, 1003–1024. [Google Scholar] [CrossRef]
- Zhu, Z.; He, Q. Spatio-temporal evaluation of the urban agglomeration expansion in the middle reaches of the Yangtze River and its impact on ecological lands. Sci. Total Environ. 2021, 790, 148150. [Google Scholar]
- Wang, Z.; Liu, L.; Shao, Z.; Wu, X. Spatiotemporal differentiation and the factors influencing urbanization and ecological environment synergistic effects within the Beijing-Tianjin-Hebei urban agglomeration. J. Environ. Manag. 2019, 243, 227–239. [Google Scholar] [CrossRef]
- Ma, L.; Liu, Y.; Zhang, X.; Yao, Y.; Yang, G.; Jones, B.A. Deep learning in remote sensing applications: A meta-analysis and review. ISPRS J. Photogramm. Remote Sens. 2019, 152, 166–177. [Google Scholar] [CrossRef]
- Fan, W.; Zhang, S. Urban land expansion in China’s six megacities from 1978 to 2015. Sci. Total Environ. 2019, 664, 60–71. [Google Scholar]
- Chen, W.; Zhang, J.; Li, N. Change in land-use structure due to urbanisation in China. J. Clean. Prod. 2021, 321, 128986. [Google Scholar] [CrossRef]
- Qu, Y.; Liu, H. The economic and environmental effects of land use transitions under rapid urbanization and the implications for land use management. Habitat Int. 2018, 82, 113–121. [Google Scholar] [CrossRef]
- Zhang, Y.; Cheng, W.; Zhang, J. Land-use transfer and its ecological effects in rapidly urbanizing areas: A case study of Nanjing, China. Sustainability 2024, 16, 10615. [Google Scholar] [CrossRef]
- Yu, C.; Zhang, X.; Yang, F.; Liu, Z.; Sun, X. Urban Spatial Growth Modeling Using Logistic Regression and Cellular Automata: A Case Study of Hangzhou. Ecol. Indic. 2020, 113, 106200. [Google Scholar]
- Zhang, H.; Wang, H.; Zhou, B. An Urban Cellular Automata Model Based on a Spatiotemporal Non-Stationary Neighborhood. Int. J. Geogr. Inf. Sci. 2024, 38, 902–930. [Google Scholar] [CrossRef]
- Wu, J.; Makhdoom, M.B.; Dakhil, M.A.A.; Aghajani, M. Machine learning in modelling land-use and land cover-change (LULCC): Current status, challenges and prospects. Sci. Total Environ. 2022, 822, 153559. [Google Scholar]
- Yao, Y.; Liu, X.; Zhang, D.; Liu, Z.; Zhao, Y. Simulation of urban expansion and farmland loss in China by integrating cellular automata and random forest. arXiv 2017, arXiv:1705.05651. [Google Scholar]
- Li, J.; Xu, B.; Liu, Y.; Wang, X.; Bai, Q.; Jiang, J. Simulation of dynamic urban expansion under ecological constraints using a long short term memory network model and cellular automata. Remote Sens. 2021, 13, 1499. [Google Scholar] [CrossRef]
- Haldar, S.; Das, S.; Bera, S. Use of Support Vector Machine and Cellular Automata Methods to Evaluate Impact of Irrigation Project on LULC. Environ. Monit. Assess. 2023, 195, 50. [Google Scholar] [CrossRef]
- Liang, X.; Guan, Q.; Clarke, K.C.; Li, S.; Wang, B.; Yao, Y. Understanding the drivers of sustainable land expansion using a patch-generating land use simulation (PLUS) model: A case study in Wuhan, China. Comput. Environ. Urban Syst. 2020, 85, 101569. [Google Scholar] [CrossRef]
- Guo, J.; Shi, S.; Chen, C.; Duan, K. A Hybrid Spatiotemporal Convolution-Based Cellular Automata Model (ST-CA) for Land-Use/Cover Change Simulation. Int. J. Appl. Earth Obs. Geoinf. 2022, 110, 102789. [Google Scholar]
- Xu, T.; Goh, J.; Cossu, G. Simulation of urban expansion via integrating artificial neural network with Markov Chain–Cellular Automata. Int. J. Geogr. Inf. Sci. 2019, 33, 1960–1983. [Google Scholar] [CrossRef]
- Qi, Y.; Xu, W.; Gao, X.; Yang, T.; Wang, H. Coupling Cellular Automata with Area Partitioning and Spatiotemporal Convolution for Dynamic Land Use Change Simulation. Sci. Total Environ. 2020, 722, 137738. [Google Scholar]
- Wu, Z.; Pan, S.; Chen, F.; Long, G.; Zhang, C.; Yu, P.S. A comprehensive survey on graph neural networks. IEEE Trans. Neural Netw. Learn. Syst. 2021, 32, 4–24. [Google Scholar] [CrossRef]
- Kipf, T.N.; Welling, M. Semi-supervised classification with graph convolutional networks. In Proceedings of the International Conference on Learning Representations, Toulon, France, 24–26 April 2017. [Google Scholar]
- Veličković, P.; Cucurull, G.; Casanova, A.; Romero, A.; Liò, P.; Bengio, Y. Graph attention networks. In Proceedings of the International Conference on Learning Representations, Vancouver, BC, Canada, 30 April–3 May 2018. [Google Scholar]
- Zhang, Y.; Yao, Y.; Gong, Q.; Liu, X.; Li, X.; Peng, Y.; Yu, H.; Yang, Z.; Zhang, J. Simulating urban land use change by integrating a convolutional neural network with vector-based cellular automata. Int. J. Geogr. Inf. Sci. 2020, 34, 1475–1499. [Google Scholar]
- Li, Y.; Chen, M.; Zhang, L. A vector-based cellular automata model for simulating urban land use change. In Proceedings of the 25th International Conference on Geoinformatics, Guangzhou, China, 3–5 January 2014; pp. 74–84. [Google Scholar]
- Guan, X.; Xing, W.; Li, J.; Wu, H. HGAT-VCA: Integrating High-Order Graph Attention Network with Vector Cellular Automata for Urban Growth Simulation. Comput. Environ. Urban Syst. 2023, 99, 101900. [Google Scholar] [CrossRef]
- Li, D.; Zheng, X.; Wang, H. Land-use simulation and decision-support system (LandSDS): Seamlessly integrating system dynamics, agent-based model, and cellular automata. Ecol. Model. 2020, 417, 108924. [Google Scholar] [CrossRef]
- Liu, Y.; Batty, M.; Wu, S.; Corcoran, J. Modelling urban change with cellular automata: Contemporary issues and future research directions. Prog. Hum. Geogr. 2021, 45, 3–24. [Google Scholar] [CrossRef]
- Benenson, I. Agent-Based Models of Geographical Systems. Int. J. Geogr. Inf. Sci. 2013, 27, 1047–1053. [Google Scholar] [CrossRef]
- Li, F.; Li, Z.; Chen, H.; Chen, Z.; Liu, M. An agent-based learning-embedded model (ABM-Learning) for urban land use planning: A case study of residential land growth simulation in Shenzhen, China. Land Use Policy 2020, 95, 104620. [Google Scholar] [CrossRef]
- Crooks, A.; Heppenstall, A.; Malleson, N.; Manley, E. Agent-based modeling and the city: A gallery of applications. In Urban Informatics; Springer: Cham, Switzerland, 2021; pp. 885–910. [Google Scholar]
- Liang, X.; Liu, X.; Li, X.; Xu, X.; Ou, J.; Chen, Y.; Wu, S.; Wang, S.; Pan, F. A future land use simulation model (FLUS) for simulating multiple land use scenarios by coupling human and natural effects. Landsc. Urban Plan. 2017, 168, 94–116. [Google Scholar]
- Liu, Y.; Chen, Y.; Fang, Q.; Zhang, X.; Wang, H.; Yang, Z. Dynamics of Land Use/Land Cover Considering Ecosystem Services for a Dense-Population Watershed Based on a Hybrid Dual-Subject Agent and Cellular Automaton Modeling Approach. Engineering 2024, 37, 182–195. [Google Scholar] [CrossRef]
- Haas, J.; Ban, Y. Urban growth and environmental impacts in Jing-Jin-Ji, the Yangtze River Delta and the Pearl River Delta. Int. J. Appl. Earth Obs. Geoinf. 2014, 30, 42–55. [Google Scholar] [CrossRef]
- National Bureau of Statistics of China. China Statistical Yearbook; China Statistic Press: Beijing, China, 2023. (In Chinese) [Google Scholar]
- Zhou, D.; Wang, C. Specific Evaluation of Resource and Environmental Carrying Capacity of Urbanized Areas for Early-Warning: A Case Study of the Beijing-Tianjin-Hebei Region. Prog. Geogr. 2017, 36, 359–366. (In Chinese) [Google Scholar]
- Yang, J.; Huang, X. The 30m annual land cover datasets and its dynamics in China from 1985 to 2023 [Data set]. Earth Syst. Sci. Data 2024, 13, 3907–3925. [Google Scholar] [CrossRef]
- Al-Kheder, S.; Wang, J.; Shan, J. Fuzzy Inference Guided Cellular Automata Urban-Growth Modelling Using Multi-Temporal Satellite Images. Int. J. Geogr. Inf. Sci. 2008, 22, 1271–1293. [Google Scholar] [CrossRef]
- He, C.; Okata, N.; Zhang, Q.; Shi, P.; Zhou, J. Modeling Urban Expansion Scenarios by Coupling Cellular Automata Model and System Dynamic Model in Beijing, China. Appl. Geogr. 2006, 26, 323–345. [Google Scholar] [CrossRef]
- Lau, K.H.; Kam, B.H. A Cellular Automata Model for Urban Land-Use Simulation. Environ. Plan. B Plan. Des. 2005, 32, 247–263. [Google Scholar] [CrossRef]
- Shen, Q.; Cheng, Q.; Tang, B.; Yung, S.; Huang, Y.; Chiu, G. A System Dynamics Model for the Sustainable Land Use Planning and Development. Habitat Int. 2008, 33, 15–25. [Google Scholar] [CrossRef]
- Qian, S.; Guo, C.J.; Xu, C. Multiple Scenarios Analysis on Land Use Simulation by Coupling Socioeconomic and Ecological Sustainability in Shanghai, China. Sustain. Cities Soc. 2023, 95, 104578. [Google Scholar]
- Wang, F.; Ma, C.; Du, X. Analysis of the Driving Force of Land Use Change Based on Geographic Detection and Simulation of Future Land Use Scenarios. Sustainability 2022, 14, 5254. [Google Scholar] [CrossRef]
- Guan, Q.; Liu, J.; Zhang, Y.; Liu, X.; Yao, Y. HashGAT-VCA: A Vector Cellular Automata Model with Hash Function and Graph Attention Network for Urban Land-Use Change Simulation. Landsc. Urban Plan. 2024, 250, 105145. [Google Scholar] [CrossRef]
- Wu, S.; Sun, F.; Zhang, W.; Xie, X.; Cui, B. Graph Neural Networks in Recommender Systems: A Survey. ACM Comput. Surv. 2023, 55, 97. [Google Scholar] [CrossRef]
- Zhou, J.; Cui, G.; Hu, S.; Zhang, Z.; Yang, C.; Liu, Z.; Wang, L.; Li, C.; Sun, M. Graph Neural Networks: A Review of Methods and Applications. AI Open 2020, 1, 57–81. [Google Scholar] [CrossRef]
- Jiang, W.; Luo, J.; He, M.; Gu, W. Graph Neural Network for Traffic Forecasting: The Research Progress. ISPRS Int. J. Geo Inf. 2023, 12, 100. [Google Scholar] [CrossRef]
- Kumar, V.; Singh, V.K.; Gupta, K.; Jha, A.K. Integrating Cellular Automata and Agent-Based Modeling for Predicting Urban Growth: A Case of Dehradun City. J. Indian Soc. Remote Sens. 2021, 49, 2779–2795. [Google Scholar] [CrossRef]
- Li, S.; Liu, X.; Li, X.; Chen, Y. Simulation Model of Land Use Dynamics and Application: Progress and Prospects. Natl. Remote Sens. Bull. 2017, 21, 329–340. (In Chinese) [Google Scholar] [CrossRef]
- Wibowo, A.; Liu, Y. Cellular Automata for Urban Growth Modelling: A Review on Factors Defining Transition Rules. Int. Rev. Spat. Plan. Sustain. Dev. 2016, 4, 60–75. [Google Scholar]
- Yao, Y.; Liu, L.; Li, Z.; Chen, T.; Shao, Z.; Liu, P.; Guo, Q.; Zhang, Y.; Kong, S.; Chen, Y.; et al. UrbanVCA: A Vector-Based Cellular Automata Framework to Simulate the Urban Land-Use Change at the Land-Parcel Level. arXiv 2021, arXiv:2103.08538. [Google Scholar]
- Liu, D.; Zhang, X.; Zhang, C.; Wang, H. A New Temporal–Spatial Dynamics Method of Simulating Land-Use Change. Ecol. Model. 2017, 350, 1–10. [Google Scholar] [CrossRef]
- Da Cunha, E.R.; Santos, C.A.G.; da Silva, R.M.; Bacani, V.M.; Pott, A. Future Scenarios Based on a CA-Markov Land Use and Land Cover Simulation Model for a Tropical Humid Basin in the Cerrado/Atlantic Forest Ecotone of Brazil. Land Use Policy 2021, 101, 105141. [Google Scholar] [CrossRef]
- Olofsson, P.; Foody, G.M.; Herold, M.; Stehman, S.V.; Woodcock, C.E.; Wulder, M.A. Making Better Use of Accuracy Data in Land Change Studies: Estimating Accuracy and Area and Quantifying Uncertainty Using Stratified Estimation. Remote Sens. Environ. 2013, 129, 122–131. [Google Scholar] [CrossRef]
- Yang, X.; Ling, Y.; Li, L.; Chen, L.; Chen, L. Worst Case Scenario-Based Methodology for Simulating Land-Use Change in Coastal City in China: A Case Study of Lianyungang. Resour. Sci. 2019, 41, 1082–1092. (In Chinese) [Google Scholar]
- Yu, Y.; Yang, M.; Zhang, B.; Liu, Z.; Song, X.; Zhang, Z. Spatially Explicit Carbon Emissions from Land Use Change: Dynamics and Scenario Simulation in the Beijing-Tianjin-Hebei Urban Agglomeration. Land Use Policy 2025, 150, 107473. [Google Scholar]
- Liu, D.; Zhang, X.; Wang, H.; Zhang, C.; Liu, J.; Li, Y. Interoperable Scenario Simulation of Land-Use Policy for Beijing–Tianjin–Hebei Region, China. Land Use Policy 2018, 75, 155–165. [Google Scholar] [CrossRef]
- Fandi, M.; Zhang, Z.; Zhang, P. Multi-Objective Optimization of Land Use in the Beijing–Tianjin–Hebei Region of China Based on the GMOP-PLUS Coupling Model. Sustainability 2023, 15, 3977. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| References | DEM | Slope | Primary Roads | Highway | Social Service Facilities | Education | GDP | Population |
|---|---|---|---|---|---|---|---|---|
| Al-Kheder et al., 2008 [42] | 1 √ | √ | √ | √ | ||||
| Guan et al., 2023 [30] | √ | √ | √ | √ | √ | |||
| Guan et al., 2024 [48] | √ | √ | √ | √ | √ | |||
| He et al., 2006 [43] | √ | √ | √ | |||||
| Lau and Kam, 2005 [44] | √ | √ | √ | |||||
| Liang et al., 2020 [21] | √ | √ | √ | √ | √ | √ | √ | |
| Liu et al., 2020 [31] | √ | √ | √ | |||||
| Shen et al., 2008 [45] | √ | |||||||
| Shi et al., 2023 [46] | √ | √ | √ | √ | √ | √ | ||
| Wu et al., 2022 [47] | √ | √ | √ | √ | √ | √ |
| Data | Data Sources | ||
|---|---|---|---|
| Land use data | 2000 Land use data | Landsat 5 TM, Landsat 7 ETM+ | |
| 2010 Land use data | Landsat 5 TM, Landsat 7 ETM+ | ||
| 2020 Land use data | Landsat 8 OLI | ||
| Natural environment factors | DEM | Geospatial data cloud | |
| Slope | Geospatial data cloud | ||
| Socioeconomic factors | School features | OSM | |
| Mall features | OSM | ||
| Bank features | OSM | ||
| Hotel features | OSM | ||
| Hospital features | OSM | ||
| House features | OSM | ||
| Restaurant features | OSM | ||
| Main road features | OSM | ||
| Highway features | OSM | ||
| ABM | Resident agents | Population | NBSC |
| GDP | NBSC | ||
| Traffic agents | Main road features | OSM | |
| Highway features | OSM | ||
| Model | 2000–2010 | 2010–2020 | ||||
|---|---|---|---|---|---|---|
| OA | Kappa | FoM | OA | Kappa | FoM | |
| GAT-VCA | 0.89 | 0.83 | 0.031 | 0.901 | 0.84 | 0.047 |
| UESP | 0.92 | 0.84 | 0.036 | 0.925 | 0.878 | 0.048 |
| Model | OA | PA | UA | FoM | Kappa |
|---|---|---|---|---|---|
| LR-VCA | 0.867 | 0.018 | 0.096 | 0.015 | 0.826 |
| RF-VCA | 0.915 | 0.016 | 0.081 | 0.013 | 0.863 |
| ANN-VCA | 0.896 | 0.056 | 0.111 | 0.041 | 0.835 |
| UESP | 0.925 | 0.069 | 0.162 | 0.048 | 0.878 |
| Type of Land Use | Land Use Area (km2) | ||||
|---|---|---|---|---|---|
| 2020 | Scenario 1 | Scenario 2 | Scenario 3 | Scenario 4 | |
| Cultivated land | 99,964 | 98,004 | 95,104 | 98,900 | 94,212 |
| Forest and grassland | 81,180 | 81,136 | 84,278 | 81,344 | 81,256 |
| Water area | 7180 | 6368 | 7476 | 6788 | 7476 |
| Construction land | 27,932 | 30,748 | 29,400 | 29,224 | 33,312 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, Y.; Liu, D.; Zheng, X.; Wang, X.; Ai, G. Urban Expansion Scenario Prediction Model: Combining Multi-Source Big Data, a Graph Attention Network, a Vector Cellular Automata, and an Agent-Based Model. Remote Sens. 2025, 17, 2272. https://doi.org/10.3390/rs17132272
Gao Y, Liu D, Zheng X, Wang X, Ai G. Urban Expansion Scenario Prediction Model: Combining Multi-Source Big Data, a Graph Attention Network, a Vector Cellular Automata, and an Agent-Based Model. Remote Sensing. 2025; 17(13):2272. https://doi.org/10.3390/rs17132272
Chicago/Turabian StyleGao, Yunqi, Dongya Liu, Xinqi Zheng, Xiaoli Wang, and Gang Ai. 2025. "Urban Expansion Scenario Prediction Model: Combining Multi-Source Big Data, a Graph Attention Network, a Vector Cellular Automata, and an Agent-Based Model" Remote Sensing 17, no. 13: 2272. https://doi.org/10.3390/rs17132272
APA StyleGao, Y., Liu, D., Zheng, X., Wang, X., & Ai, G. (2025). Urban Expansion Scenario Prediction Model: Combining Multi-Source Big Data, a Graph Attention Network, a Vector Cellular Automata, and an Agent-Based Model. Remote Sensing, 17(13), 2272. https://doi.org/10.3390/rs17132272