
A Full-Life-Cycle Modeling Framework for Cropland Abandonment Detection Based on Dense Time Series of Landsat-Derived Vegetation and Soil Fractions


Abstract
1. Introduction
2. Materials and Methods
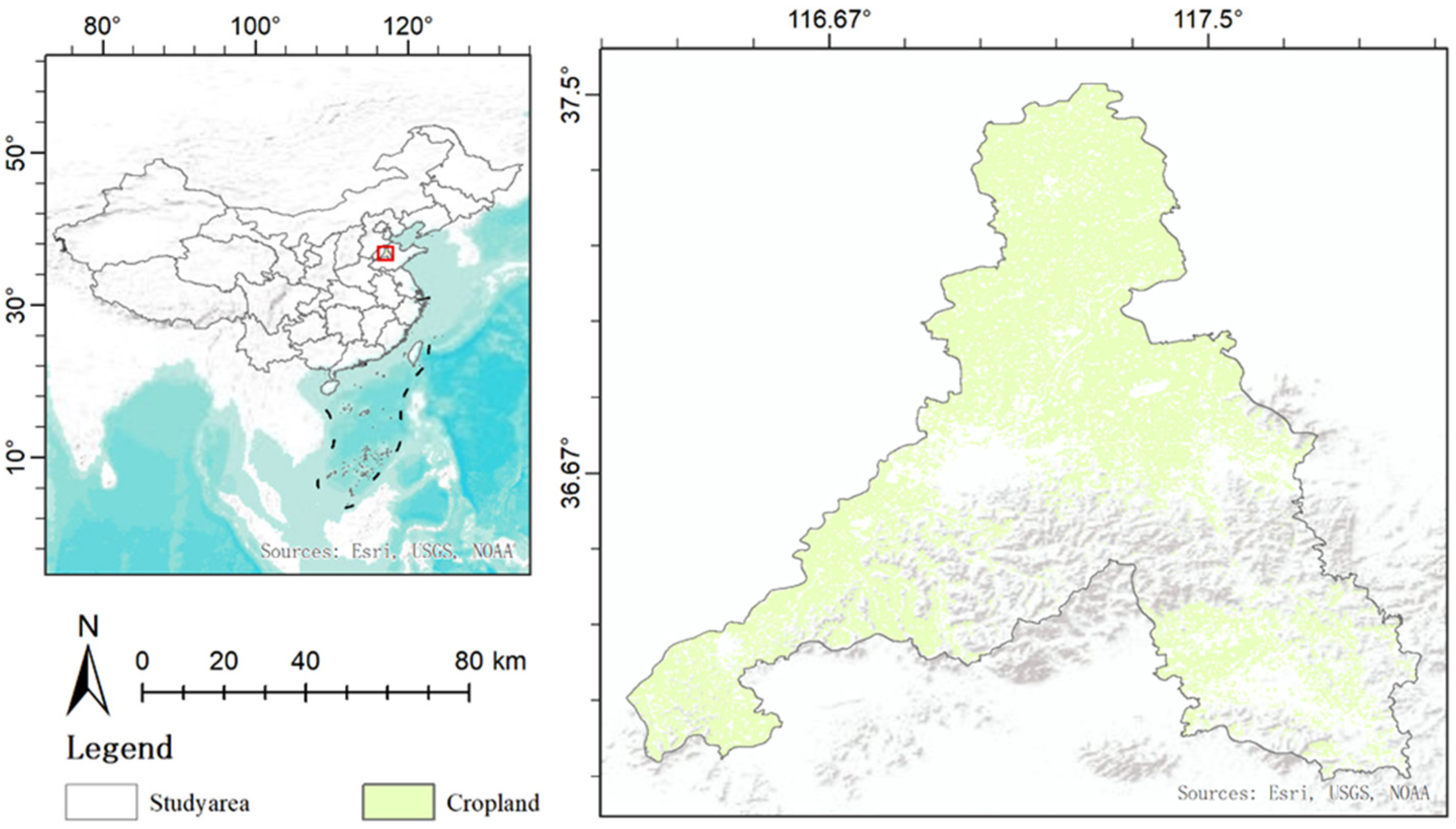
2.1. Study Area
2.2. Data and Processes
2.2.1. Landsat Surface Reflectance Time Series (2000–2022)
2.2.2. Multi-Source Cropland Boundary Datasets
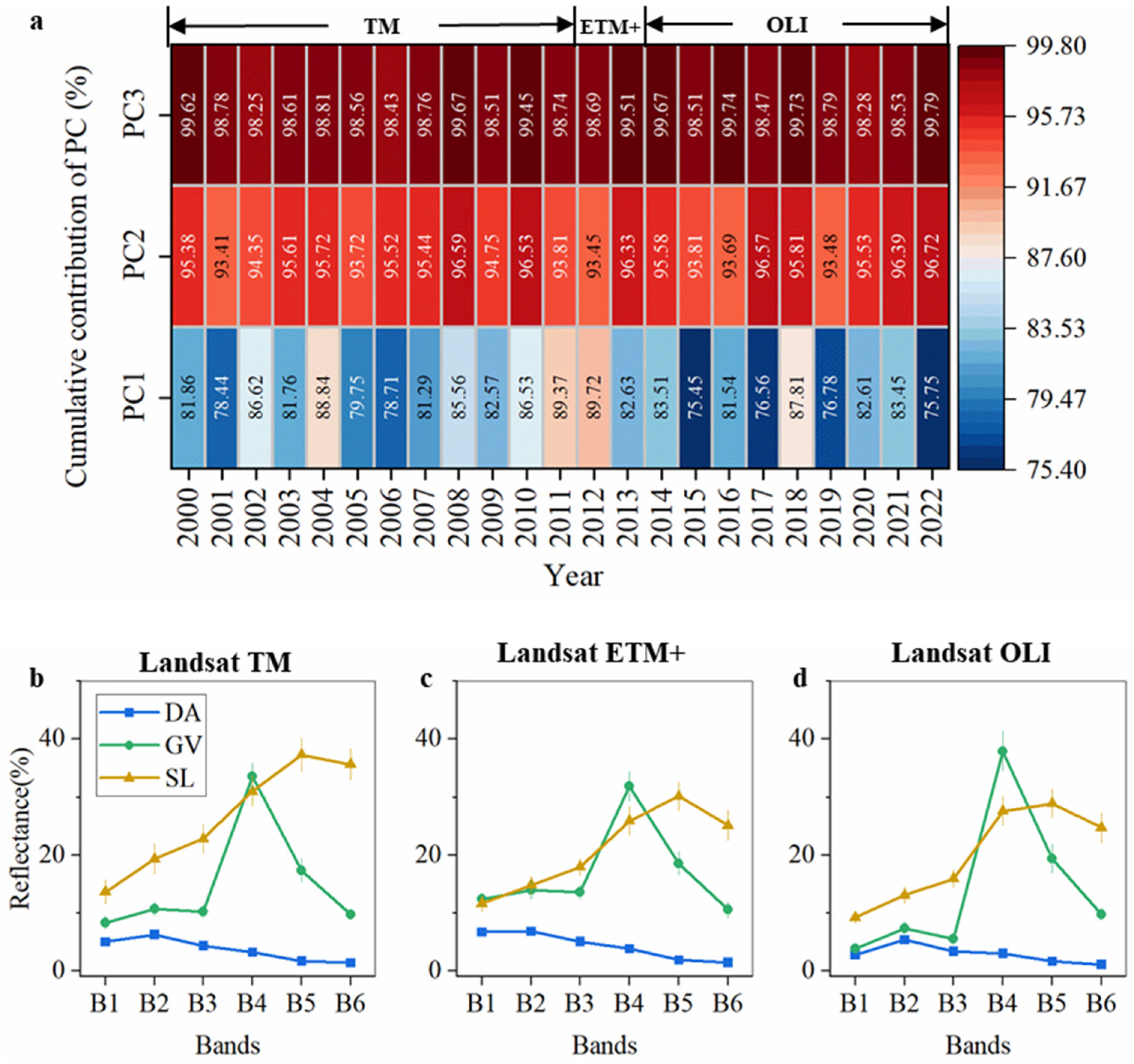
2.3. Generating Annual Continuous Vegetation–Soil Fractional Maps from Spectral Mixture Model
2.4. Cropland Abandonment Detection
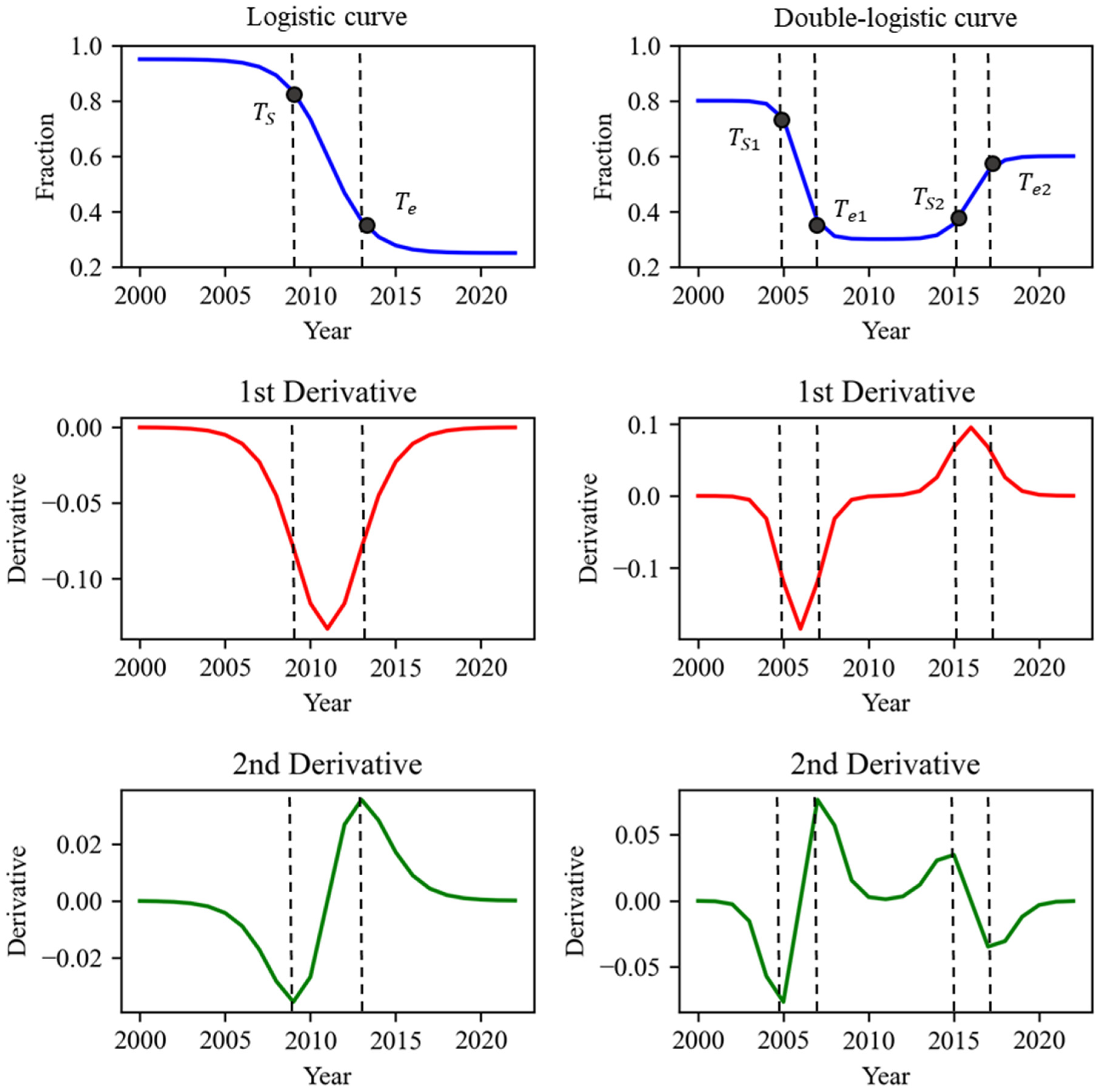
2.4.1. Modeling Temporal Trajectories in Vegetation–Soil Endmember Time Series
2.4.2. Characterizing the Full-Life-Cycle Thematic Features of the Abandonment Process
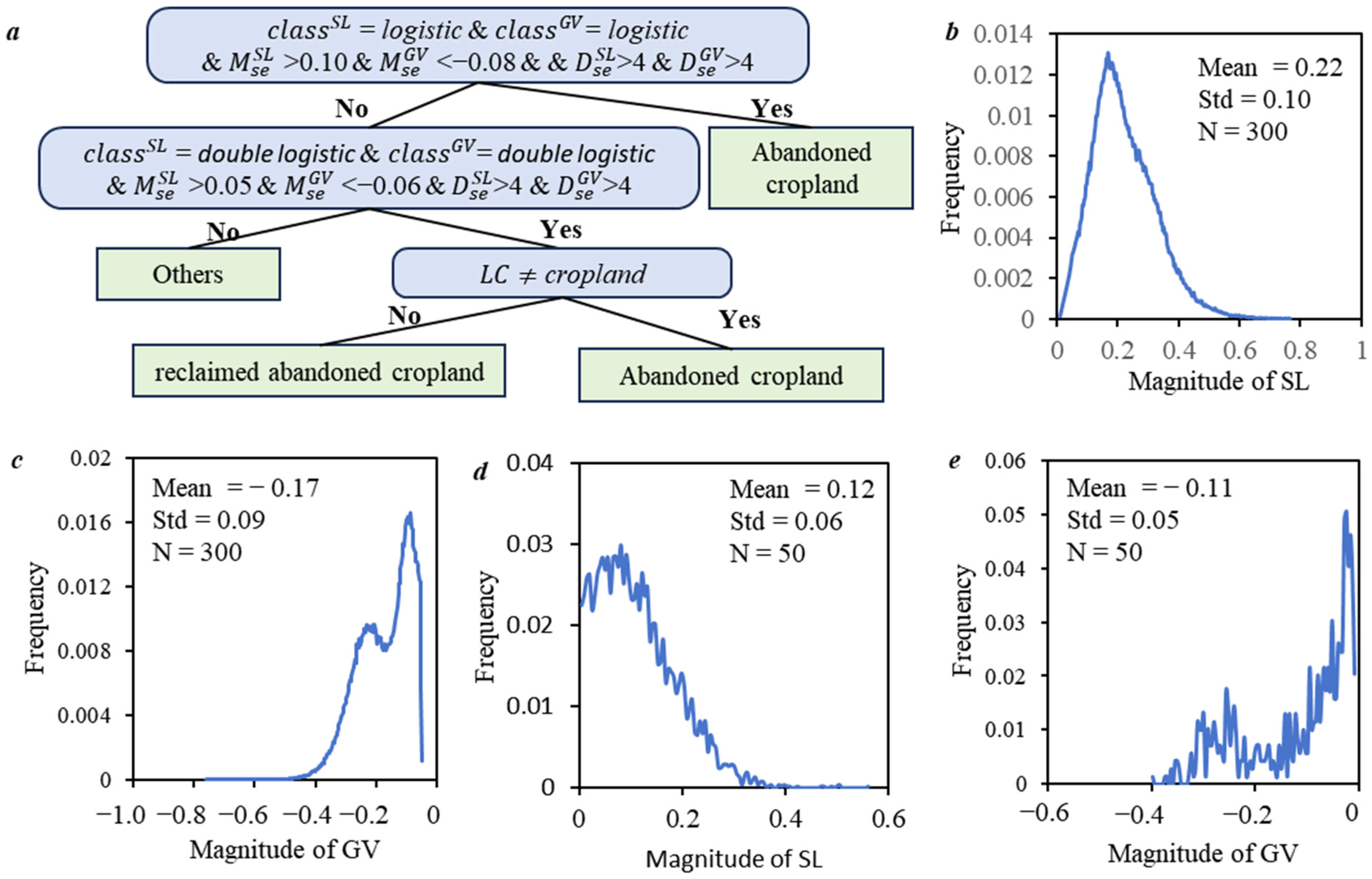
2.4.3. Detecting Cropland Abandonment Using Knowledge-Based Framework
2.4.4. Validation and Assessments
3. Results
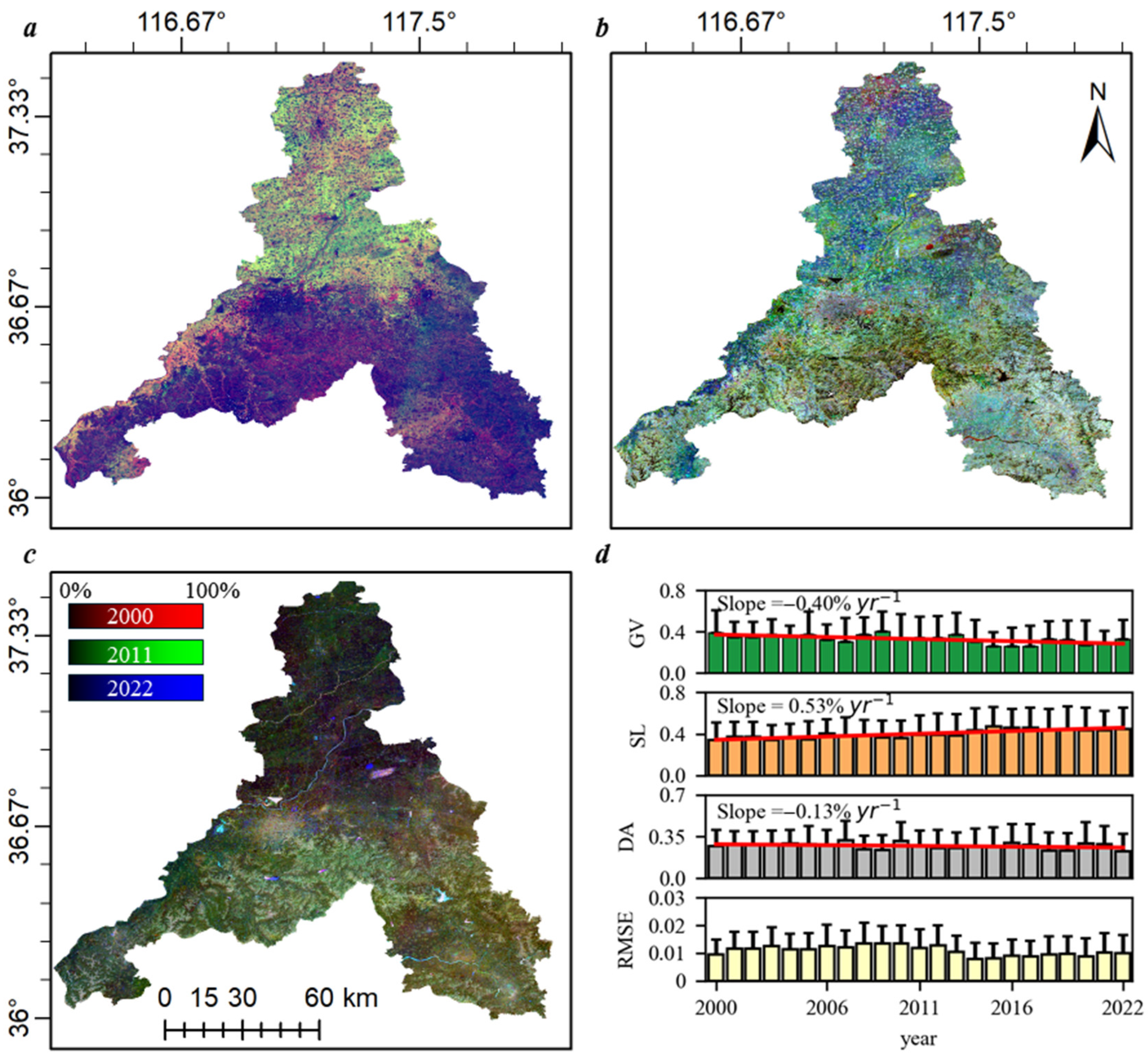
3.1. Annual Estimates of GV, SL, and DA Fractional Maps
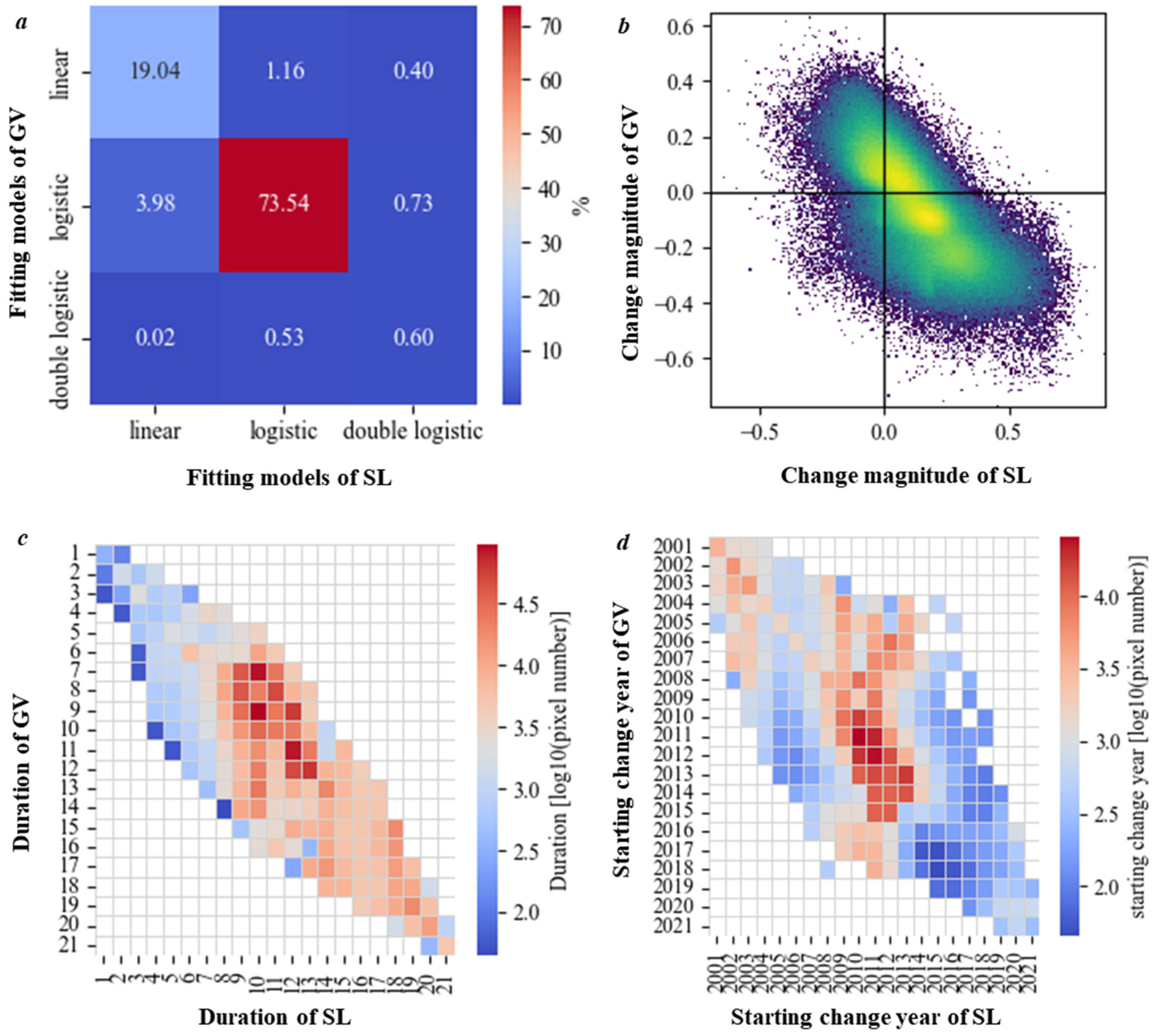
3.2. Multi-Dimensional Thematic Features in Vegetation–Soil Endmember Time Series
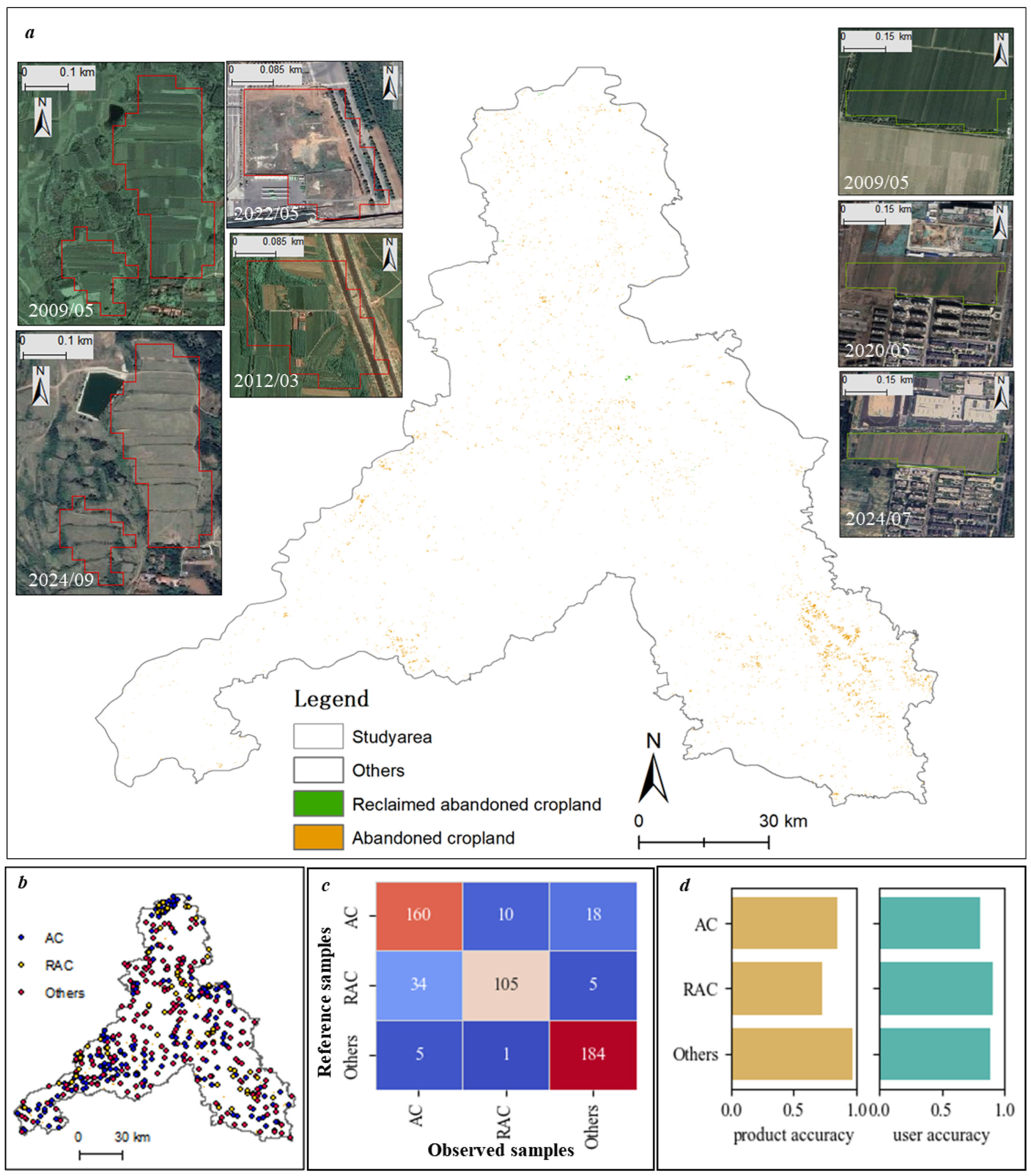
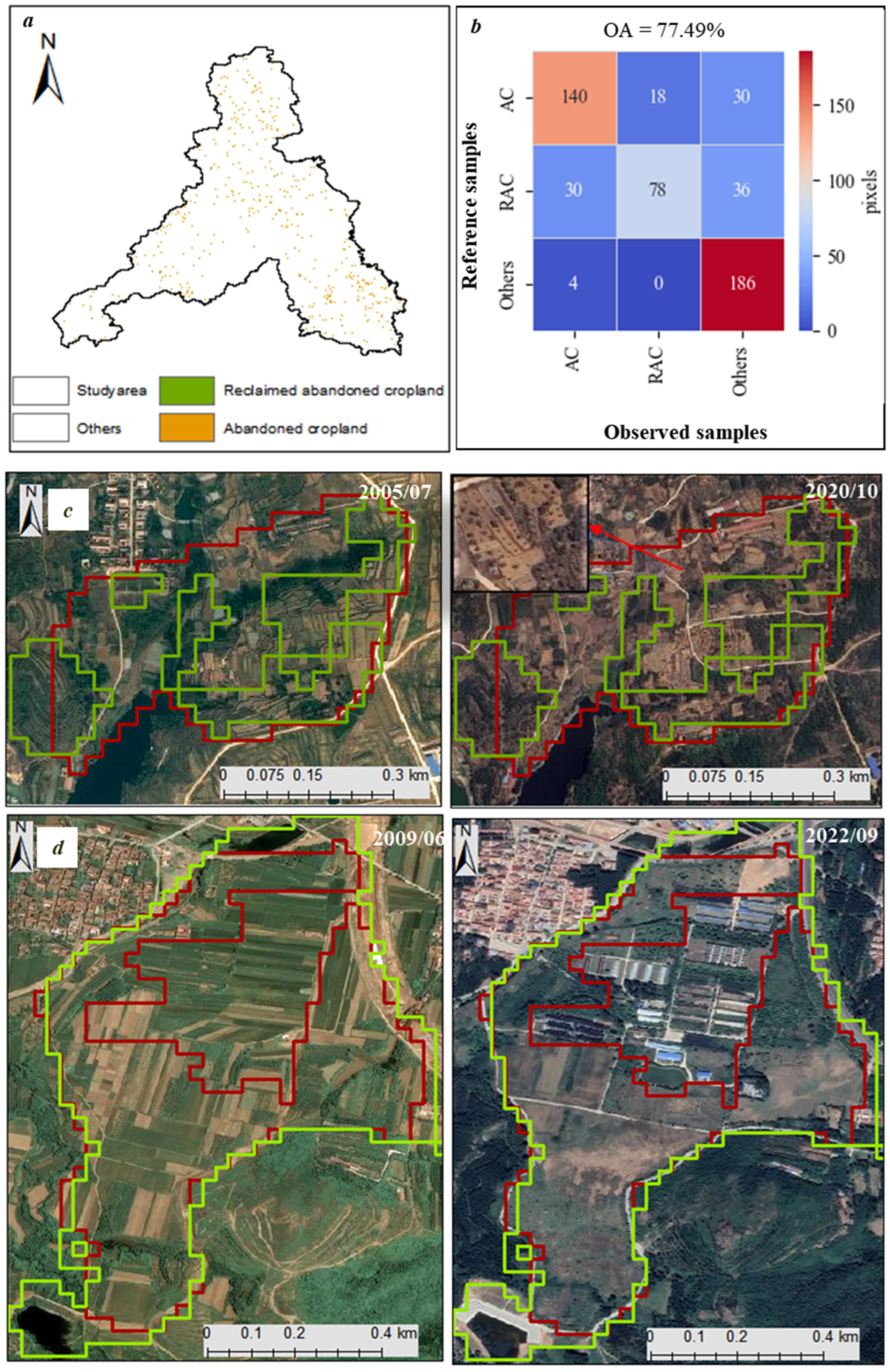
3.3. Mapping Cropland Abandonment: Abandoned vs. Reclaimed Cropland
4. Discussion
4.1. Comparison to Land Cover-Based Detection Methods
4.2. Advantages and Limitations of Change Detection from Endmember Time Series
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Rey Benayas, J.M.; Martins, A.; Nicolau, J.M.; Schulz, J.J. Abandonment of agricultural land: An overview of drivers and consequences. CABI Rev. 2007, 57, 1–14. [Google Scholar] [CrossRef]
- Hong, C.; Prishchepov, A.V.; Bavorova, M. Cropland abandonment in mountainous China: Patterns and determinants at multiple scales and policy implications. Land Use Policy 2024, 145, 107292. [Google Scholar] [CrossRef]
- Crawford, C.L.; Wiebe, R.A.; Yin, H.; Radeloff, V.C.; Wilcove, D.S. Biodiversity consequences of cropland abandonment. Nat. Sustain. 2024, 7, 1596–1607. [Google Scholar] [CrossRef]
- Knoke, T.; Calvas, B.; Moreno, S.O.; Onyekwelu, J.C.; Griess, V.C. Food production and climate protection—What abandoned lands can do to preserve natural forests. Glob. Environ. Change 2023, 23, 1064–1072. [Google Scholar] [CrossRef]
- Yang, Y.; Hobbie, S.E.; Hernandez, R.R.; Fargione, J.; Grodsky, S.M.; Tilman, D.; Zhu, Y.-G.; Luo, Y.; Smith, T.M.; Jungers, J.M.; et al. Restoring abandoned farmland to mitigate climate change on a full earth. One Earth 2020, 3, 176–186. [Google Scholar] [CrossRef]
- Zheng, Q.; Ha, T.; Prishchepov, A.V.; Zeng, Y.; Yin, H.; Koh, L.P. The neglected role of abandoned cropland in supporting both food security and climate change mitigation. Nat. Commun. 2023, 14, 6083. [Google Scholar] [CrossRef]
- Hong, C.; Prishchepov, A.V.; Jin, X.; Han, B.; Lin, J.; Liu, J.; Ren, J.; Zhou, Y. The role of harmonized Landsat Sentinel-2 (HLS) products to reveal multiple trajectories and determinants of cropland abandonment in subtropical mountainous areas. J. Environ. Manag. 2023, 336, 117621. [Google Scholar] [CrossRef]
- Löw, F.; Prishchepov, A.V.; Waldner, F.; Dubovyk, O.; Akramkhanov, A.; Biradar, C.; Lamers, J.P.A. Mapping Cropland Abandonment in the Aral Sea Basin with MODIS Time Series. Remote Sens. 2018, 10, 159. [Google Scholar] [CrossRef]
- Ye, J.; Hu, Y.; Feng, Z.; Zhen, L.; Shi, Y.; Tian, Q.; Zhang, Y. Monitoring of Cropland Abandonment and Land Reclamation in the Farming–Pastoral Zone of Northern China. Remote Sens. 2024, 16, 1089. [Google Scholar] [CrossRef]
- Tamiminia, H.; Salehi, B.; Mahdianpari, M.; Quackenbush, L.; Adeli, S.; Brisco, B. Google Earth Engine for geo-big data applications: A meta-analysis and systematic review. ISPRS J. Photogramm. Remote Sens. 2020, 164, 152–170. [Google Scholar] [CrossRef]
- Dara, A.; Baumann, M.; Kuemmerle, T.; Pflugmacher, D.; Rabe, A.; Griffiths, P.; Hölzel, N.; Kamp, J.; Freitag, M.; Hostert, P. Mapping the timing of cropland abandonment and recultivation in northern Kazakhstan using annual Landsat time series. Remote Sens. Environ. 2018, 213, 49–60. [Google Scholar] [CrossRef]
- Guo, A.; Yue, W.; Yang, J.; Xue, B.; Xiao, W.; Li, M.; He, T.; Zhang, M.; Jin, X.; Zhou, Q. Cropland abandonment in China: Patterns, drivers, and implications for food security. J. Clean. Prod. 2023, 418, 138154. [Google Scholar] [CrossRef]
- Long, Y.; Sun, J.; Wellens, J.; Colinet, G.; Wu, W.; Meersmans, J. Mapping the Spatiotemporal Dynamics of Cropland Abandonment and Recultivation across the Yangtze River Basin. Remote Sens. 2024, 16, 1052. [Google Scholar] [CrossRef]
- Hong, C.; Prishchepov, A.V.; Jin, X.; Zhou, Y. Mapping cropland abandonment and distinguishing from intentional afforestation with Landsat time series. Int. J. Appl. Earth Obs. Geoinf. 2024, 127, 103693. [Google Scholar] [CrossRef]
- Yin, H.; Brandão, A., Jr.; Buchner, J.; Helmers, D.; Iuliano, B.G.; Kimambo, N.E.; Lewińska, K.E.; Razenkova, E.; Rizayeva, A.; Rogova, N.; et al. Monitoring cropland abandonment with Landsat time series. Remote Sens. Environ. 2020, 246, 111873. [Google Scholar] [CrossRef]
- Elmore, A.J.; Mustard, J.F.; Manning, S.J.; Lobell, D.B. Quantifying vegetation change in semiarid environments: Precision and accuracy of spectral mixture analysis and the normalized difference vegetation index. Remote Sens. Environ. 2000, 73, 87–102. [Google Scholar] [CrossRef]
- Weng, Q.; Hu, X.; Liu, H. Estimating impervious surfaces using linear spectral mixture analysis with multitemporal ASTER images. Int. J. Remote Sens. 2009, 30, 4807–4830. [Google Scholar] [CrossRef]
- Sun, Q.; Zhang, P.; Wei, H.; Liu, A.; You, S.; Sun, D. Improved mapping and understanding of desert vegetation-habitat complexes from intraannual series of spectral endmember space using cross-wavelet transform and logistic regression. Remote Sens. Environ. 2020, 236, 111516. [Google Scholar] [CrossRef]
- Sun, Q.; Zhang, P.; Jiao, X.; Lin, X.; Duan, W.; Ma, S.; Pan, Q.; Chen, L.; Zhang, Y.; You, S.; et al. A global estimate of monthly vegetation and soil fractions from spatio-temporally adaptive spectral mixture analysis during 2001–2022. Earth Syst. Sci. Data Discuss. 2023, 16, 1333–1351. [Google Scholar] [CrossRef]
- Zhu, Z.; Wang, S.; Woodcock, C.E. Improvement and expansion of the Fmask algorithm: Cloud, cloud shadow, and snow detection for Landsats 4–7, 8, and Sentinel 2 images. Remote Sens. Environ. 2015, 159, 269–277. [Google Scholar] [CrossRef]
- Potapov, P.; Turubanova, S.; Hansen, M.C.; Tyukavina, A.; Zalles, V.; Khan, A.; Song, X.-P.; Pickens, A.; Shen, Q.; Cortez, J. Global maps of cropland extent and change show accelerated cropland expansion in the twenty-first century. Nat. Food 2022, 3, 19–28. [Google Scholar] [CrossRef] [PubMed]
- Oliphant, A.; Thenkabail, P.; Teluguntla, P. Global Food-Security-Support-Analysis Data at 30-m Resolution (GFSAD30) Cropland-extent Products—Download Analysis; U.S. Geological Survey Open-File Report 2022–1001; US Geological Survey: Reston, VA, USA, 2022; 20p. [CrossRef]
- Tu, Y.; Wu, S.; Chen, B.; Weng, Q.; Bai, Y.; Yang, J.; Yu, L.; Xu, B. A 30 m annual cropland dataset of China from 1986 to 2021. Earth Syst. Sci. Data 2024, 16, 2297–2316. [Google Scholar] [CrossRef]
- Chen, J.; Chen, J.; Liao, A.; Cao, X.; Chen, L.; Chen, X.; He, C.; Han, G.; Peng, S.; Lu, M.; et al. Global land cover mapping at 30 m resolution: A POK-based operational approach. ISPRS J. Photogramm. Remote Sens. 2015, 103, 7–27. [Google Scholar] [CrossRef]
- Zhang, X.; Zhao, T.; Xu, H.; Liu, W.; Wang, J.; Chen, X.; Liu, L. GLC_FCS30D: The first global 30 m land-cover dynamics monitoring product with a fine classification system for the period from 1985 to 2022 generated using dense-time-series Landsat imagery and the continuous change-detection method. Earth Syst. Sci. Data 2024, 16, 1353–1381. [Google Scholar] [CrossRef]
- Xu, X.; Li, B.; Liu, X.; Li, X.; Shi, Q. Mapping annual global land cover changes at a 30 m resolution from 2000 to 2015. Natl. Remote Sens. Bull. 2021, 25, 1896–1916. [Google Scholar] [CrossRef]
- Yang, J.; Huang, X. The 30 m annual land cover dataset and its dynamics in China from 1990 to 2019. Earth Syst. Sci. Data 2021, 13, 3907–3925. [Google Scholar] [CrossRef]
- Sun, D. Detection of dryland degradation using Landsat spectral unmixing remote sensing with syndrome concept in Minqin County, China. Int. J. Appl. Earth Obs. Geoinf. 2015, 41, 34–45. [Google Scholar] [CrossRef]
- Sun, Q.; Zhang, P.; Jiao, X.; Han, W.; Sun, Y.; Sun, D. Identifying and understanding alternative states of dryland landscape: A hierarchical analysis of time series of fractional vegetation-soil nexuses in China’s Hexi Corridor. Landsc. Urban Plan. 2021, 215, 104225. [Google Scholar] [CrossRef]
- Powell, R.L.; Roberts, D.A.; Dennison, P.E.; Hess, L.L. Sub-pixel mapping of urban land cover using multiple endmember spectral mixture analysis: Manaus, Brazil. Remote Sens. Environ. 2007, 106, 253–267. [Google Scholar] [CrossRef]
- Small, C.; Milesi, C. Multi-scale standardized spectral mixture models. Remote Sens. Environ. 2013, 136, 442–454. [Google Scholar] [CrossRef]
- Zhang, P.; Kohli, D.; Sun, Q.; Zhang, Y.; Liu, S.; Sun, D. Remote sensing modeling of urban density dynamics across 36 major cities in China: Fresh insights from hierarchical urbanized space. Landsc. Urban Plan. 2020, 203, 103896. [Google Scholar] [CrossRef]
- Li, X.; Zhou, Y.; Zhu, Z.; Liang, L.; Yu, B.; Cao, W. Mapping annual urban dynamics (1985–2015) using time series of Landsat data. Remote Sens. Environ. 2018, 216, 674–683. [Google Scholar] [CrossRef]
- Wu, X.; Zhao, N.; Wang, Y.; Ye, Y.; Wang, W.; Yue, T.; Zhang, L.; Liu, Y. The potential role of abandoned cropland for food security in China. Resour. Conserv. Recycl. 2025, 212, 108004. [Google Scholar] [CrossRef]
- Yadav, K.; Congalton, R.G. Accuracy Assessment of Global Food Security-Support Analysis Data (GFSAD) Cropland Extent Maps Produced at Three Different Spatial Resolutions. Remote Sens. 2018, 10, 1800. [Google Scholar] [CrossRef]
- Zhang, C.; Dong, J.; Ge, Q. Quantifying the accuracies of six 30-m cropland datasets over China: A comparison and evaluation analysis. Comput. Electron. Agric. 2022, 197, 106946. [Google Scholar] [CrossRef]
- Zhu, Z.; Woodcock, C.E. Continuous change detection and classification of land cover using all available Landsat data. Remote Sens. Environ. 2014, 144, 152–171. [Google Scholar] [CrossRef]
- Verbesselt, J.; Hyndman, R.; Newnham, G.; Culvenor, D. Detecting trend and seasonal changes in satellite image time series. Remote Sens. Environ. 2010, 114, 106–115. [Google Scholar] [CrossRef]
- Wang, Q.; Ding, X.; Tong, X.; Atkinson, P.M. Spatio-temporal spectral unmixing of time-series images. Remote Sens. Environ. 2021, 259, 112407. [Google Scholar] [CrossRef]
- Somers, B.; Asner, G.P.; Tits, L.; Coppin, P. Endmember variability in spectral mixture analysis: A review. Remote Sens. Environ. 2011, 115, 1603–1616. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Products | Spatial Resolution | Time Span | Declared Accuracy | Source |
|---|---|---|---|---|
| Global Cropland Change 2000–2019 | 30 m | 2000–2019 | OA: 97.5% | [21] |
| GFSAD | 30 m | 2000–2020 | OA: 91.7% | [22] |
| CACD | 30 m | 1986–2021 | OA: 93% | [23] |
| Globeland30 | 30 m | 2000/2010/2020 | OA: 83.5–85.7% PA of cropland: 79.6% | [24] |
| GLC_FCS30D | 30 m | 1985–2022 | OA: 80.88% PA of cropland: 87.22% | [25] |
| AGLC | 30 m | 2000–2015 | OA: 76.10% PA of cropland: 74.23% | [26] |
| CLCD | 30 m | 1990–2019 | OA: 79.30% PA of cropland: 71.43–86.22% | [27] |
| Fitting Model | Parameters | Explanations |
|---|---|---|
| Linear | k | Change magnitude from 2001 to 2022 |
| Logistic | Starting change point timing | |
| Ending change point timing | ||
| Change magnitude from starting point to ending point | ||
| Duration between 2022 and starting change point timing | ||
| Double-logistic | Starting change point timing for first logistic | |
| Ending change point timing for first logistic | ||
| Change magnitude for ending change point timing for first logistic and Starting change point timing for second logistic | ||
| Starting change point timing for second logistic | ||
| Ending change point timing for second logistic | ||
| Duration between ending change point timing for first logistics and starting change point timing for second logistics |
| Scenario Type | Scenario Knowledge | Schematic of the Time Series | Essentials for Identification |
|---|---|---|---|
| Abandoned cropland | In arid zones, cropland abandonment leads to a sharp decrease in GV, accompanied by an increase in SL. Due to water constraints, most of the cropland after abandonment is dominated by bare soil or low-cover barren land. | 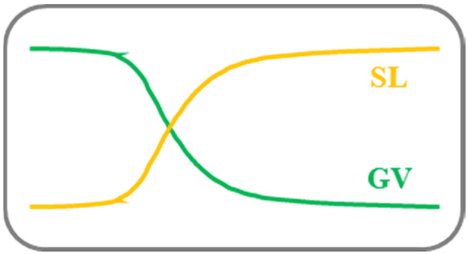 |
|
| In humid zones, cropland abandonment also results in a sharp decrease in GV, accompanied by an increase in SL. However, natural vegetation gradually recovers, and natural land types with a high degree of cover are dominant after the abandonment of cultivated land. | 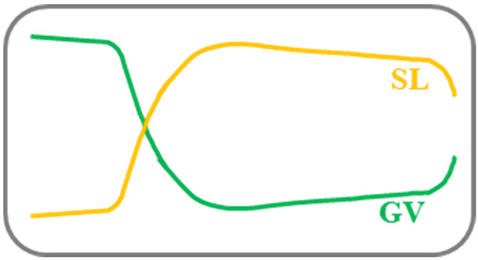 |
| |
| Reclaimed cropland | Initially, the abandonment of cropland leads to a sharp reduction in vegetation cover, accompanied by an increase in bare soil, which again develops as cropland land after a sustained period of natural land cover (≥5 years). |  |
|
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, Q.; You, Z.; Zhang, P.; Wu, H.; Yu, Z.; Wang, L. A Full-Life-Cycle Modeling Framework for Cropland Abandonment Detection Based on Dense Time Series of Landsat-Derived Vegetation and Soil Fractions. Remote Sens. 2025, 17, 2193. https://doi.org/10.3390/rs17132193
Sun Q, You Z, Zhang P, Wu H, Yu Z, Wang L. A Full-Life-Cycle Modeling Framework for Cropland Abandonment Detection Based on Dense Time Series of Landsat-Derived Vegetation and Soil Fractions. Remote Sensing. 2025; 17(13):2193. https://doi.org/10.3390/rs17132193
Chicago/Turabian StyleSun, Qiangqiang, Zhijun You, Ping Zhang, Hao Wu, Zhonghai Yu, and Lu Wang. 2025. "A Full-Life-Cycle Modeling Framework for Cropland Abandonment Detection Based on Dense Time Series of Landsat-Derived Vegetation and Soil Fractions" Remote Sensing 17, no. 13: 2193. https://doi.org/10.3390/rs17132193
APA StyleSun, Q., You, Z., Zhang, P., Wu, H., Yu, Z., & Wang, L. (2025). A Full-Life-Cycle Modeling Framework for Cropland Abandonment Detection Based on Dense Time Series of Landsat-Derived Vegetation and Soil Fractions. Remote Sensing, 17(13), 2193. https://doi.org/10.3390/rs17132193