
Bayesian Denoising Algorithm for Low SNR Photon-Counting Lidar Data via Probabilistic Parameter Optimization Based on Signal and Noise Distribution




Abstract

1. Introduction
2. Materials
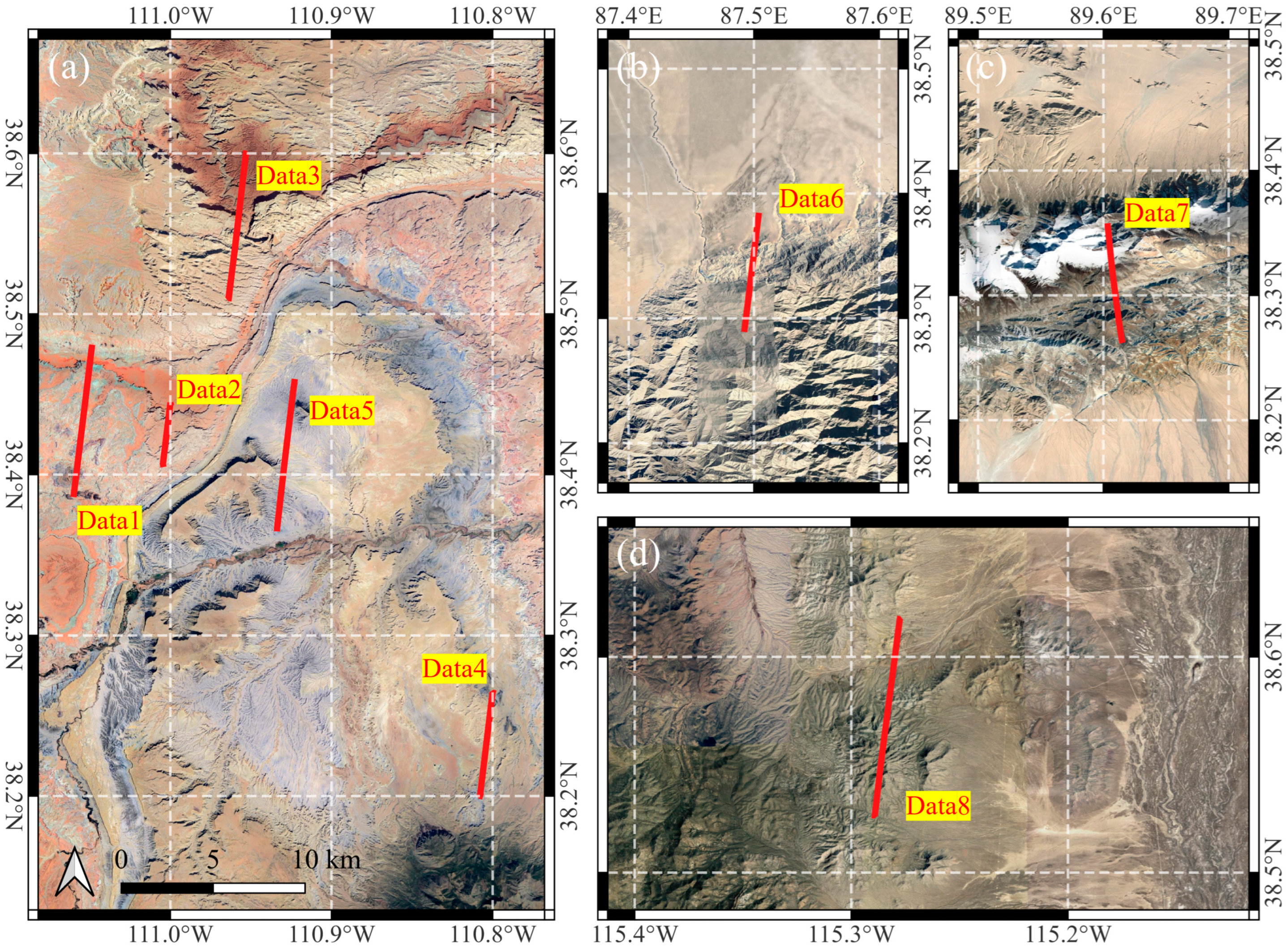
2.1. Datasets
2.1.1. ATLAS Data
2.1.2. Airborne Data
2.2. Photon Event Simulation Method of a Lidar
2.3. Test Dataset
3. Denoising Method
3.1. PDF Model of Signal and Noise Photons
3.1.1. PDF of Noise Photons
3.1.2. PDF of Signal Photons
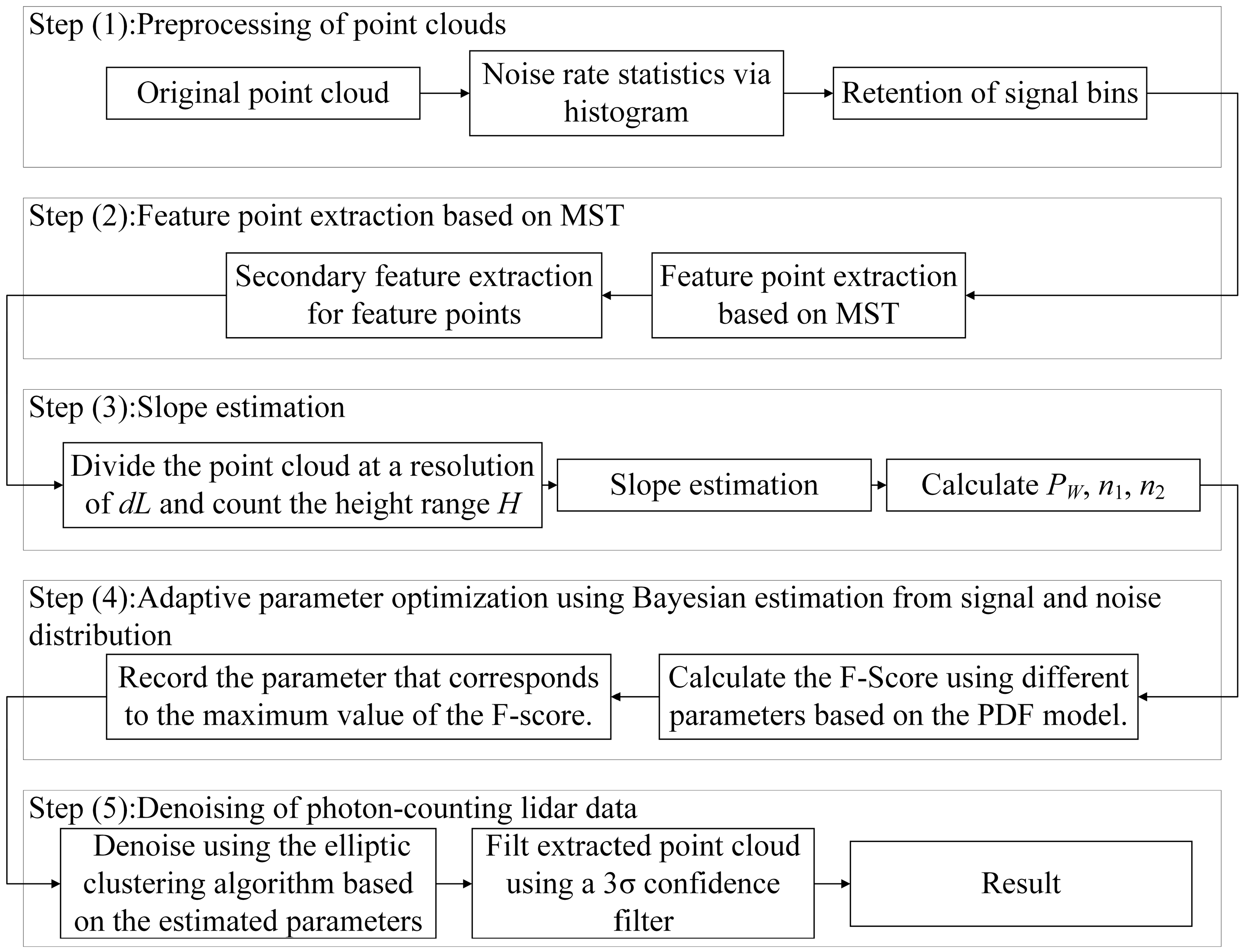
3.2. Denoising Algorithm Based on a MST Bayesian Framework
4. Model Validation
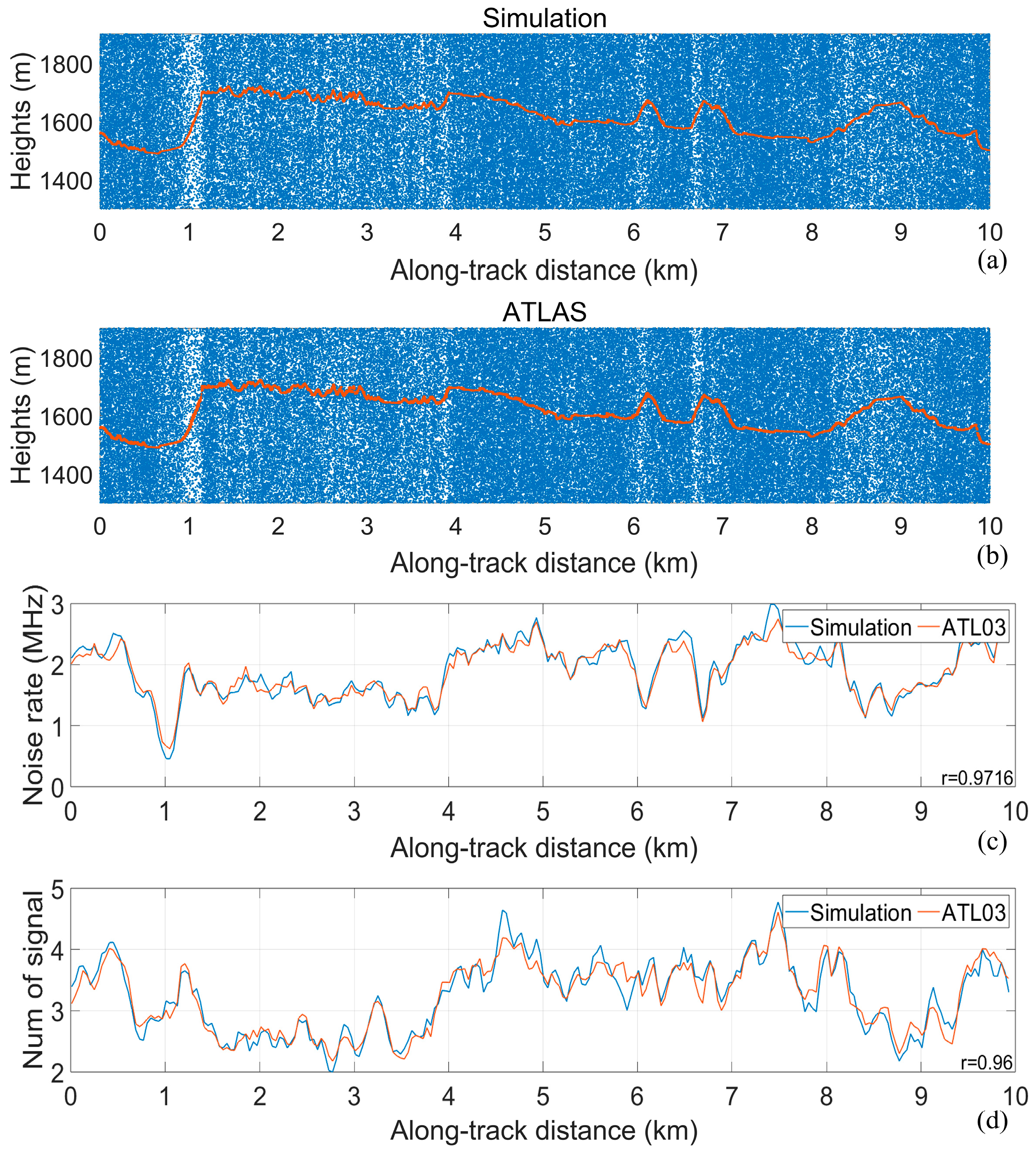
4.1. Validation of the Simulation Results
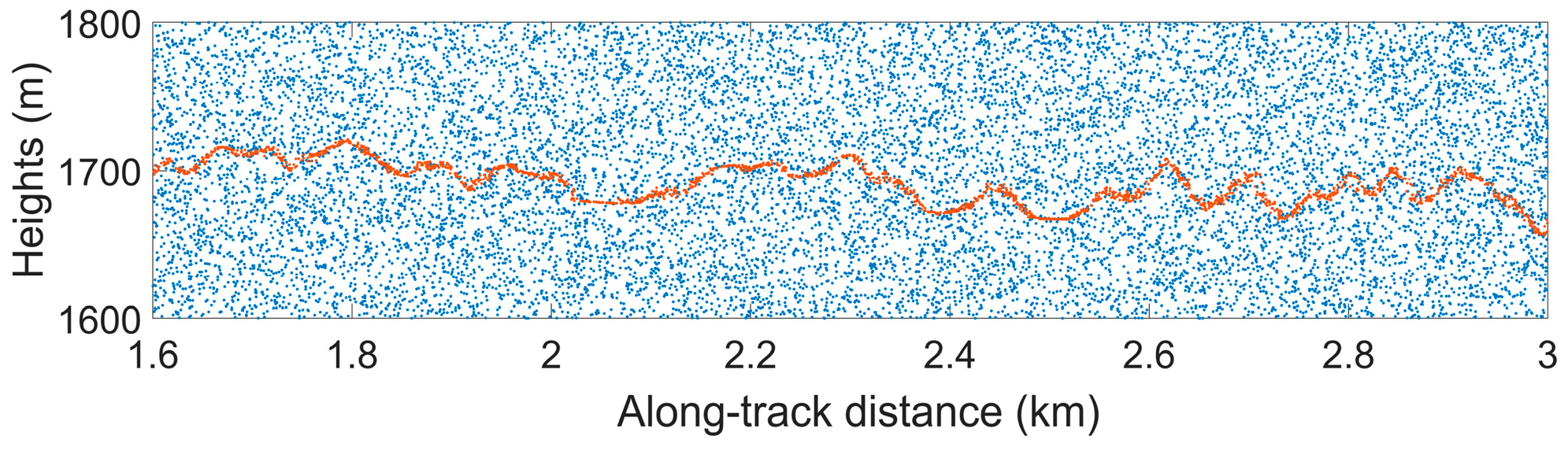
4.2. Validation of Feature Point Extraction
4.3. Validation of the PDF Model
5. Results
5.1. Results of Slope Estimation
5.2. Denoising Results
6. Discussion
6.1. Analysis of Denoising Results
6.2. The Robustness to Mislabeled Signal/Noise in Validation Datasets
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Markus, T.; Neumann, T.; Martino, A.; Abdalati, W.; Brunt, K.; Csatho, B.; Farrell, S.; Fricker, H.; Gardner, A.; Harding, D.; et al. The Ice, Cloud, and land Elevation Satellite-2 (ICESat-2): Science requirements, concept, and implementation. Remote Sens. Environ. 2017, 190, 260–273. [Google Scholar] [CrossRef]
- Neumann, T.A.; Martino, A.J.; Markus, T.; Bae, S.; Bock, M.R.; Brenner, A.C.; Brunt, K.M.; Cavanaugh, J.; Fernandes, S.T.; Hancock, D.W.; et al. The Ice, Cloud, and Land Elevation Satellite-2 mission: A global geolocated photon product derived from the Advanced Topographic Laser Altimeter System. Remote Sens. Environ. 2019, 233, 111325. [Google Scholar] [CrossRef] [PubMed]
- Smith, B.; Fricker, H.A.; Gardner, A.S.; Medley, B.; Nilsson, J.; Paolo, F.S.; Holschuh, N.; Adusumilli, S.; Brunt, K.; Csatho, B.; et al. Pervasive ice sheet mass loss reflects competing ocean and atmosphere processes. Science 2020, 368, 1239. [Google Scholar] [CrossRef]
- Popescu, S.C.; Zhou, T.; Nelson, R.; Neuenschwande, A.; Sheridan, R.; Narine, L.; Walsh, K.M. Photon counting LiDAR: An adaptive ground and canopy height retrieval algorithm for ICESat-2 data. Remote Sens. Environ. 2018, 208, 154–170. [Google Scholar] [CrossRef]
- Narine, L.L.; Popescu, S.; Neuenschwander, A.; Zhou, T.; Srinivasan, S.; Harbeck, K. Estimating aboveground biomass and forest canopy cover with simulated ICESat-2 data. Remote Sens. Environ. 2019, 224, 1–11. [Google Scholar] [CrossRef]
- Fan, Y.; Ke, C.; Shen, X.; Xiao, Y.; Livingstone, S.J.; Sole, A.J. Subglacial lake activity beneath the ablation zone of the Greenland Ice Sheet. Cryosphere Discuss. 2022, 17, 1775–1786. [Google Scholar] [CrossRef]
- Xu, Y.; Li, H.; Liu, B.; Xie, H.; Ozsoy Cicek, B. Deriving Antarctic sea-ice thickness from satellite altimetry and estimating consistency for NASA’s ICESat/ICESat-2 missions. Geophys. Res. Lett. 2021, 48, e2021GL093425. [Google Scholar] [CrossRef]
- Feng, T.; Duncanson, L.; Montesano, P.; Hancock, S.; Minor, D.; Guenther, E.; Neuenschwander, A. A systematic evaluation of multi-resolution ICESat-2 ATL08 terrain and canopy heights in boreal forests. Remote Sens. Environ. 2023, 291, 113570. [Google Scholar] [CrossRef]
- Zhu, X.X.; Nie, S.; Wang, C.; Xi, X.H.; Lao, J.Y.; Li, D. Consistency analysis of forest height retrievals between GEDI and ICESat-2. Remote Sens. Environ. 2022, 281, 113244. [Google Scholar] [CrossRef]
- Martino, A.J.; Neumann, T.A.; Kurtz, N.T.; Mclennan, D. ICESat-2 mission overview and early performance. In Proceedings of the Sensors, Systems, and Next-Generation Satellites XXIII, Strasbourg, France, 9–12 September 2019; pp. 68–77. [Google Scholar]
- Magruder, L.A.; Brunt, K.M.; Alonzo, M. Early ICESat-2 on-orbit geolocation validation using ground-based corner cube retro-reflectors. Remote Sens. 2020, 12, 3653. [Google Scholar] [CrossRef]
- Parrish, C.E.; Magruder, L.A.; Neuenschwander, A.L.; Forfinski-Sarkozi, N.; Alonzo, M.; Jasinski, M. Validation of ICESat-2 ATLAS Bathymetry and Analysis of ATLAS’s Bathymetric Mapping Performance. Remote Sens. 2019, 11, 1634. [Google Scholar] [CrossRef]
- Ranndal, H.; Sigaard Christiansen, P.; Kliving, P.; Baltazar Andersen, O.; Nielsen, K. Evaluation of a statistical approach for extracting shallow water bathymetry signals from ICESat-2 ATL03 photon data. Remote Sens. 2021, 13, 3548. [Google Scholar] [CrossRef]
- Lee, Z.; Shangguan, M.; Garcia, R.A.; Lai, W.; Lu, X.; Wang, J.; Yan, X. Confidence measure of the shallow-water bathymetry map obtained through the fusion of Lidar and multiband image data. J. Remote Sens. 2021, 2021, 9841804. [Google Scholar] [CrossRef]
- Franze, S.E.; Andersen, O.B.; Nilsson, B.; Nielsen, K. Lake gravity anomalies from ICESat-2 laser altimetry and geodetic radar altimetry. Adv. Space Res. 2024, 74, 4487–4501. [Google Scholar] [CrossRef]
- Horvat, C.; Blanchard Wrigglesworth, E.; Petty, A. Observing waves in sea ice with ICESat-2. Geophys. Res. Lett. 2020, 47, e2020GL087629. [Google Scholar] [CrossRef]
- Bagnardi, M.; Kurtz, N.T.; Petty, A.A.; Kwok, R. Sea Surface Height Anomalies of the Arctic Ocean from ICESat-2: A First Examination and Comparisons with CryoSat-2. Geophys. Res. Lett. 2021, 48, e2021GL093155. [Google Scholar] [CrossRef]
- Herzfeld, U.; Hayes, A.; Palm, S.; Hancock, D.; Vaughan, M.; Barbieri, K. Detection and Height Measurement of Tenuous Clouds and Blowing Snow in ICESat-2 ATLAS Data. Geophys. Res. Lett. 2021, 48, e2021GL093473. [Google Scholar] [CrossRef]
- Palm, S.P.; Yang, Y.K.; Herzfeld, U.; Hancock, D.; Hayes, A.; Selmer, P.; Hart, W.; Hlavka, D. ICESat-2 Atmospheric Channel Description, Data Processing and First Results. Earth Space Sci. 2021, 8, e2020EA001470. [Google Scholar] [CrossRef]
- Palm, S.P.; Selmer, P.; Yorks, J.; Nicholls, S.; Nowottnick, E. Planetary Boundary Layer Height Estimates from ICESat-2 and CATS Backscatter Measurements. Front. Remote Sens. 2021, 2, 716951. [Google Scholar] [CrossRef]
- Xu, N.; Ma, Y.; Zhou, H.; Zhang, W.; Zhang, Z.; Wang, X.H. A method to derive bathymetry for dynamic water bodies using ICESat-2 and GSWD data sets. IEEE Geosci. Remote Sens. Lett. 2020, 19, 1500305. [Google Scholar] [CrossRef]
- Winker, D.M.; Vaughan, M.A.; Omar, A.; Hu, Y.; Powell, K.A.; Liu, Z.; Hunt, W.H.; Young, S.A. Overview of the CALIPSO mission and CALIOP data processing algorithms. J. Atmos. Ocean. Technol. 2009, 26, 2310–2323. [Google Scholar] [CrossRef]
- Palm, S.P.; Yang, Y.U.; Herzfeld, C. ICESat-2 Algorithm Theoretical Basis Document for Atmospheric Data Products (ATL04 & ATL09), version 8.3; Technical Report; NASA National Snow and Ice Data Center, Distributed Active Archive Center: Washington, DC, USA, 2020. [Google Scholar]
- Yang, J.; Zheng, H.Y.; Ma, Y.; Zhao, P.F.; Zhou, H.; Li, S.; Wang, X.H. Background noise model of spaceborne photon-counting lidars over oceans and aerosol optical depth retrieval from ICESat-2 noise data. Remote Sens. Environ. 2023, 299, 113858. [Google Scholar] [CrossRef]
- Abshire, J.B.; Sun, X.; Riris, H.; Sirota, J.M.; Mcgarry, J.F.; Palm, S.; Yi, D.; Liiva, P. Geoscience laser altimeter system (GLAS) on the ICESat mission: On-orbit measurement performance. Geophys. Res. Lett. 2005, 32, 21–22. [Google Scholar] [CrossRef]
- Horan, K.H.; Kerekes, J.P. An automated statistical analysis approach to noise reduction for photon-counting lidar systems. In Proceedings of the 2013 IEEE International Geoscience and Remote Sensing Symposium-IGARSS, Melbourne, Australia, 21–26 July 2013; pp. 4336–4339. [Google Scholar]
- Luthcke, S.B.; Pennington, T.; Rebold, T.; Thomas, T. Algorithm Theoretical Basis Document (ATBD) for ATL03g ICESat-2 Receive Photon Geolocation; NASA Goddard Space Flight Center: Greenbelt, MD, USA, 2019; p. 53. [Google Scholar]
- Neuenschwander, A.; Pitts, K. The ATL08 land and vegetation product for the ICESat-2 Mission. Remote Sens. Environ. 2019, 221, 247–259. [Google Scholar] [CrossRef]
- Wang, X.; Pan, Z.G.; Glennie, C. A Novel Noise Filtering Model for Photon-Counting Laser Altimeter Data. IEEE Geosci. Remote Sens. Lett. 2016, 13, 947–951. [Google Scholar] [CrossRef]
- Ma, R.J.; Kong, W.; Chen, T.; Shu, R.; Huang, G.H. KNN Based Denoising Algorithm for Photon-Counting LiDAR: Numerical Simulation and Parameter Optimization Design. Remote Sens. 2022, 14, 6236. [Google Scholar] [CrossRef]
- Zhang, J.; Kerekes, J.; Csatho, B.; Schenk, T.; Wheelwright, R. A clustering approach for detection of ground in micropulse photon-counting LiDAR altimeter data. In Proceedings of the 2014 IEEE Geoscience and Remote Sensing Symposium, Quebec City, QC, Canada, 13–18 July 2014; pp. 177–180. [Google Scholar]
- Zhang, J.S.; Kerekes, J. An Adaptive Density-Based Model for Extracting Surface Returns from Photon-Counting Laser Altimeter Data. IEEE Geosci. Remote Sens. Lett. 2015, 12, 726–730. [Google Scholar] [CrossRef]
- Ester, M.; Kriegel, H.; Sander, J.; Xu, X. A density-based algorithm for discovering clusters in large spatial databases with noise. In Proceedings of the KDD-96: The Second International Conference on Knowledge Discovery and Data Mining, Miinchen, Germany, 2 August 1996; pp. 226–231. [Google Scholar]
- Ma, Y.; Zhang, W.; Sun, J.; Li, G.; Wang, X.H.; Li, S.; Xu, N. Photon-counting Lidar: An adaptive signal detection method for different land cover types in coastal areas. Remote Sens. 2019, 11, 471. [Google Scholar] [CrossRef]
- Huang, J.; Xing, Y.; You, H.; Qin, L.; Tian, J.; Ma, J. Particle swarm optimization-based noise filtering algorithm for photon cloud data in forest area. Remote Sens. 2019, 11, 980. [Google Scholar] [CrossRef]
- Zhang, J. Analytical Modeling and Performance Assessment of Micropulse Photon-Counting Lidar System; Rochester Institute of Technology: Rochester, NY, USA, 2014; ISBN 1321453779. [Google Scholar]
- Nie, S.; Wang, C.; Xi, X.; Luo, S.; Li, G.; Tian, J.; Wang, H. Estimating the vegetation canopy height using micro-pulse photon-counting LiDAR data. Opt. Express 2018, 26, A520–A540. [Google Scholar] [CrossRef]
- Zhang, Z.Y.; Liu, X.Y.; Ma, Y.; Xu, N.; Zhang, W.H.; Li, S. Signal Photon Extraction Method for Weak Beam Data of ICESat-2 Using Information Provided by Strong Beam Data in Mountainous Areas. Remote Sens. 2021, 13, 863. [Google Scholar] [CrossRef]
- Zhu, X.X.; Nie, S.; Wang, C.; Xi, X.H.; Wang, J.S.; Li, D.; Zhou, H.Y. A Noise Removal Algorithm Based on OPTICS for Photon-Counting LiDAR Data. IEEE Geosci. Remote Sens. Lett. 2021, 18, 1471–1475. [Google Scholar] [CrossRef]
- Zhang, G.P.; Xu, Q.; Xing, S.; Li, P.C.; Zhang, X.L.; Wang, D.D.; Dai, M.F. A Noise-Removal Algorithm Without Input Parameters Based on Quadtree Isolation for Photon-Counting LiDAR. IEEE Geosci. Remote Sens. Lett. 2022, 19, 1–5. [Google Scholar] [CrossRef]
- Neumann, T.; Brenner, A.; Hancock, D.; Robbins, J.; Saba, J.; Harbeck, K.; Gibbons, A. ICE, CLOUD, and Land Elevation Satellite-2 (ICESat-2) Project Algorithm Theoretical Basis Document (ATBD) for Global Geolocated Photons ATL03; National Aeronautics and Space Administration, Goddard Space Flight Center: Greenbelt, MD, USA, 2019. [Google Scholar]
- Neumann, T.A.; Brenner, A.; Hancock, D.; Robbins, J.; Saba, J.; Harbeck, K.; Gibbons, A.; Lee, J.; Luthcke, S.B.; Rebold, T. ATLAS/ICESat-2 L2A Global Geolocated Photon Data, version 3; NASA National Snow and Ice Data Center Distributed Active Archive Center: Boulder, CO, USA, 2021. [Google Scholar]
- Neuenschwander, A.L.; Pitts, K.L.; Jelley, B.P.; Robbins, J.; Klotz, B.; Popescu, S.C.; Nelson, R.F.; Harding, D.; Pederson, D.; Sheridan, R. ATLAS/ICESat-2 L3A Land and Vegetation Height, version 3; NASA National Snow and Ice Data Center Distributed Active Archive Center: Boulder, CO, USA, 2021. [Google Scholar]
- Malambo, L.; Popescu, S. Photonlabeler: An inter-disciplinary platform for visual interpretation and labeling of icesat-2 geolocated photon data. Remote Sens. 2020, 12, 3168. [Google Scholar] [CrossRef]
- Gardner, C.S. Target Signatures for Laser Altimeters—An analysis. Appl. Opt. 1982, 21, 448–453. [Google Scholar] [CrossRef]
- Gardner, C.S. Ranging performance of satellite laser altimeters. IEEE Trans. Geosci. Remote Sens. 1992, 30, 1061–1072. [Google Scholar] [CrossRef]
- Degnan, J.J. Photon-counting multikilohertz microlaser altimeters for airborne and spaceborne topographic measurements. J. Geodyn. 2002, 34, 503–549. [Google Scholar] [CrossRef]
- Liu, X.; Ma, Y.; Li, S.; Yang, J.; Zhang, Z.; Tian, X. Photon counting correction method to improve the quality of reconstructed images in single photon compressive imaging systems. Opt. Express 2021, 29, 37945–37961. [Google Scholar] [CrossRef]
- Li, S.; Liu, X.; Xiao, Y.; Ma, Y.; Yang, J.; Zhu, K.; Tian, X. 3D compressive imaging system with a single photon-counting detector. Opt. Express 2023, 31, 4712–4738. [Google Scholar] [CrossRef]
- Müller, J.W. Dead-time problems. Nucl. Instrum. Methods 1973, 112, 47–57. [Google Scholar] [CrossRef]
- Gatt, P.; Johnson, S.; Nichols, T. Geiger-mode avalanche photodiode ladar receiver performance characteristics and detection statistics. Appl. Opt. 2009, 48, 3261–3276. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Z.; Ma, Y.; Li, S.; Zhao, P.; Xiang, Y.; Liu, X.; Zhang, W. Ranging performance model considering the pulse pileup effect for PMT-based photon-counting lidars. Opt. Express 2020, 28, 13586–13600. [Google Scholar] [CrossRef]
- Ma, Y.; Li, S.; Zhang, W.; Zhang, Z.; Liu, R.; Wang, X.H. Theoretical ranging performance model and range walk error correction for photon-counting lidars with multiple detectors. Opt. Express 2018, 26, 15924–15934. [Google Scholar] [CrossRef]
- Marpaung, F.; Arnita. Comparative of prim’s and boruvka’s algorithm to solve minimum spanning tree problems. J. Phys. Conf. Ser. 2020, 1462, 012043. [Google Scholar] [CrossRef]
- Sedgewick, R.; Wayne, K. Algorithms; Addison-Wesley Professional: Boston, MA, USA, 2011; ISBN 032157351X. [Google Scholar]
- Gelman, A.; Carlin, J.B.; Stern, H.S.; Rubin, D.B. Bayesian Data Analysis; Chapman and Hall/CRC: Boca Raton, FL, USA, 1995; ISBN 0429258410. [Google Scholar]
- Hripcsak, G.; Rothschild, A.S. Agreement, the f-measure, and reliability in information retrieval. J. Am. Med. Inf. Assoc. 2005, 12, 296–298. [Google Scholar] [CrossRef] [PubMed]
- Lin, Y.; Knudby, A.J. Global automated extraction of bathymetric photons from icesat-2 data based on a pointnet++ model. Int. J. Appl. Earth Obs. Geoinf. 2023, 124, 103512. [Google Scholar] [CrossRef]
- Velikova, M.; Fernandez-Diaz, J.; Glennie, C. ICESat-2 noise filtering using a point cloud neural network. ISPRS Open J. Photogramm. Remote Sens. 2024, 11, 100053. [Google Scholar] [CrossRef]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Area | Name | Track Number | Track Used | Date |
|---|---|---|---|---|
| Eastern Utah | Data 1 | ATL03_20231018193445_04552106_006_02 | gt3L | 2023.10.18 |
| Data 2 | ATL03_20220121015652_04551406_005_01 | gt2L | 2022.01.21 | |
| Data 3 | ATL03_20200425081752_04550706_005_01 | gt3L | 2020.04.25 | |
| Data 4 | ATL03_20210821091308_08971206_005_01 | gt3R | 2021.08.21 | |
| Data 5 | ATL03_20220421213643_04551506_005_02 | gt3R | 2022.04.21 | |
| Altun Mountain in Tibet | Data 6 | ATL03_20221001003812_01571706_005_01 | gt2L | 2022.10.01 |
| Data 7 | ATL03_20210926055926_00581302_005_01 | gt2L | 2021.09.26 | |
| Southern Nevada | Data 8 | ATL03_20220613192251_12631506_005_01 | gt2L | 2022.06.13 |
| Track Used | Quantitative Parameter | OPTICS | Quadtree | ATL08 | Proposed Algorithm | |
|---|---|---|---|---|---|---|
| Data 5 | ATL03_20220421213643_ 04551506_005_02_GT3L | REC | 0.9957 | 0.7908 | 0.9681 | 0.9301 |
| PRE | 0.8372 | 0.8903 | 0.9119 | 0.9416 | ||
| F | 0.9096 | 0.8376 | 0.9391 | 0.9358 | ||
| Data 6 | ATL03_20221001003812_ 01571706_005_01_GT2L | REC | 0.9929 | 0.7661 | 0.7351 | 0.9292 |
| PRE | 0.8727 | 0.9904 | 0.9640 | 0.9929 | ||
| F | 0.9289 | 0.8639 | 0.8341 | 0.9600 | ||
| Data 7 | ATL03_20210926055926_ 00581302_005_01_GT2L | REC | 0.9942 | 0.7964 | 0.8182 | 0.9030 |
| PRE | 0.7244 | 0.7925 | 0.8091 | 0.9450 | ||
| F | 0.8381 | 0.7945 | 0.8136 | 0.9235 | ||
| Data 8 | ATL03_20220613192251_ 12631506_005_01_GT2L | REC | 0.9992 | 0.8079 | 0.9784 | 0.9136 |
| PRE | 0.6707 | 0.7666 | 0.8440 | 0.9373 | ||
| F | 0.8027 | 0.7867 | 0.9062 | 0.9253 |
| NS | FN | Quantitative Parameter | OPTICS | Quadtree | DRAGANN | Proposed Algorithm | |
|---|---|---|---|---|---|---|---|
| Data 2 | 1 | 0.5 MHZ | REC | 0.9913 | 0.8932 | 0.9876 | 0.9816 |
| PRE | 0.9152 | 0.9745 | 0.9145 | 0.9807 | |||
| F | 0.9517 | 0.9321 | 0.9497 | 0.9812 | |||
| 2 MHZ | REC | 0.9841 | 0.8494 | 0.9440 | 0.9733 | ||
| PRE | 0.8335 | 0.8890 | 0.8280 | 0.9218 | |||
| F | 0.9026 | 0.8687 | 0.8822 | 0.9468 | |||
| 10 MHZ | REC | 0.9573 | 0.7929 | 0.9008 | 0.9049 | ||
| PRE | 0.6737 | 0.6579 | 0.7765 | 0.8985 | |||
| F | 0.7908 | 0.7191 | 0.8340 | 0.9017 | |||
| 2 | 0.5 MHZ | REC | 0.9847 | 0.8973 | 0.9960 | 0.9949 | |
| PRE | 0.9524 | 0.9764 | 0.9541 | 0.9887 | |||
| F | 0.9683 | 0.9352 | 0.9746 | 0.9918 | |||
| 2 MHZ | REC | 0.9839 | 0.8552 | 0.9755 | 0.9908 | ||
| PRE | 0.9048 | 0.9470 | 0.8939 | 0.9550 | |||
| F | 0.9427 | 0.8988 | 0.9329 | 0.9726 | |||
| 10 MHZ | REC | 0.9730 | 0.8419 | 0.9691 | 0.9362 | ||
| PRE | 0.7611 | 0.6050 | 0.7309 | 0.9328 | |||
| F | 0.8541 | 0.7041 | 0.8333 | 0.9345 | |||
| Data 3 | 0.64 | 0.5 MHZ | REC | 0.9955 | 0.8044 | 0.9494 | 0.9252 |
| PRE | 0.8575 | 0.9428 | 0.8233 | 0.9857 | |||
| F | 0.9213 | 0.8681 | 0.8818 | 0.9545 | |||
| 1 MHZ | REC | 0.9915 | 0.8054 | 0.8859 | 0.8965 | ||
| PRE | 0.7969 | 0.8595 | 0.7727 | 0.9752 | |||
| F | 0.8836 | 0.8316 | 0.8255 | 0.9342 | |||
| 2 MHZ | REC | 0.9879 | 0.7816 | 0.9104 | 0.8803 | ||
| PRE | 0.6780 | 0.6973 | 0.6824 | 0.9426 | |||
| F | 0.8041 | 0.7371 | 0.7801 | 0.9104 | |||
| Data 4 | 1.35 | 1 MHZ | REC | 1 | 0.8947 | 0.9913 | 0.9973 |
| PRE | 0.9225 | 0.9688 | 0.9225 | 0.9613 | |||
| F | 0.9597 | 0.9303 | 0.9557 | 0.9789 | |||
| 5 MHZ | REC | 0.9976 | 0.8249 | 0.9847 | 0.9825 | ||
| PRE | 0.8606 | 0.8690 | 0.7925 | 0.9295 | |||
| F | 0.9240 | 0.8464 | 0.8782 | 0.9553 | |||
| 10 MHZ | REC | 0.9936 | 0.8337 | 0.9551 | 0.9773 | ||
| PRE | 0.8438 | 0.6006 | 0.7372 | 0.9062 | |||
| F | 0.9126 | 0.6982 | 0.8321 | 0.9404 |
| System Parameter | Pre | Rec | F |
|---|---|---|---|
| Truth | 0.9218 | 0.9733 | 0.9468 |
| Mislabeled | 0.9234 | 0.9057 | 0.9147 |
| Error | 0.17% | 6.95% | 3.39% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Q.; Yang, J.; Ma, Y.; Yu, W.; Han, Q.; Zhou, Z.; Li, S. Bayesian Denoising Algorithm for Low SNR Photon-Counting Lidar Data via Probabilistic Parameter Optimization Based on Signal and Noise Distribution. Remote Sens. 2025, 17, 2182. https://doi.org/10.3390/rs17132182
Liu Q, Yang J, Ma Y, Yu W, Han Q, Zhou Z, Li S. Bayesian Denoising Algorithm for Low SNR Photon-Counting Lidar Data via Probabilistic Parameter Optimization Based on Signal and Noise Distribution. Remote Sensing. 2025; 17(13):2182. https://doi.org/10.3390/rs17132182
Chicago/Turabian StyleLiu, Qi, Jian Yang, Yue Ma, Wenbo Yu, Qijin Han, Zhibiao Zhou, and Song Li. 2025. "Bayesian Denoising Algorithm for Low SNR Photon-Counting Lidar Data via Probabilistic Parameter Optimization Based on Signal and Noise Distribution" Remote Sensing 17, no. 13: 2182. https://doi.org/10.3390/rs17132182
APA StyleLiu, Q., Yang, J., Ma, Y., Yu, W., Han, Q., Zhou, Z., & Li, S. (2025). Bayesian Denoising Algorithm for Low SNR Photon-Counting Lidar Data via Probabilistic Parameter Optimization Based on Signal and Noise Distribution. Remote Sensing, 17(13), 2182. https://doi.org/10.3390/rs17132182