1. Introduction
In the forward-looking region, high-resolution radar imaging serves as a vital component in both defense and civil application, such as autonomous landing, aerial supply drops, ground mapping, and regional navigation [
1,
2,
3,
4]. However, traditional Doppler beam sharpening (DBS) and Synthetic Aperture Radar (SAR) techniques are unable to achieve high-resolution radar imaging results in the forward-looking region due to Doppler ambiguity [
5,
6]. Real aperture radar (RAR) typically benefits from its scanning mode to achieve imaging by arbitrary observation geometry, which enables high-range resolution through the transmission of chirp signals with a wide bandwidth. However, its azimuth resolution is typically limited by the size of its antenna aperture, resulting in comparatively coarse resolution [
7,
8,
9]. Consequently, enhancing the angular resolution capability emerges as a critical technical requirement.
In RAR scanning mode, the azimuthal echo can be mathematically modeled as the convolution between the target scattering coefficients and the antenna pattern [
10,
11,
12]. However, caused by the underdetermined antenna measurement matrix, target reconstruction is equivalent to a pathological inverse problem.
To reconstruct target scenes, a substantial number of super-resolution methods have been proposed. In [
13,
14,
15,
16], a sparse Bayesian framework-based target reconstruction method is developed. The method enhances angular resolution by assuming statistical prior distributions for both the target and noise. Unfortunately, it is sensitive to noise and may struggle to reconstruct target scenes in the low-SNR environments. To reduce noise influence, a truncated singular value decomposition (TSVD)-based approach is introduced in [
17,
18,
19], and the authors obtain an approximate solution by truncating the singular value components most affected by noise. Nevertheless, the enhancement in angular resolution is inherently constrained. In [
20], a Tikhonov-regularized solution framework is developed through systematic modification of the steering matrix’s singular value spectrum, where the regularization parameter is chosen manually. However, the angular resolution enhancement is functionally equivalent to that of the TSVD method.
Due to the mathematical similarities, many scholars introduce array signal processing methods into RAR imaging to obtain robust target scene reconstruction results [
9,
21]. Wiener filtering is a classic signal processing method for enhancing resolution [
22,
23]. But this method has poor performance in low-SNR environments. To address the limitations of Wiener filtering, a Spectral Iterative Adaptive Approach (IAA) method is introduced [
24]. The method has demonstrated good robustness and effective noise suppression capabilities in various environments, but it requires multiple inversion of high-dimensional matrices, resulting in significant time costs. To address this problem, a Fast IAA method by exploiting the block-triangular structure of the echo autocorrelation matrix is further proposed in [
25]. While retaining good super-resolution performance, this method has lower computational complexity. However, its fixed number of iterations per range bin undoubtedly leads to computational redundancy. To address the drawback of slow convergence in the IAA algorithm, a range recursive IAA algorithm is proposed in [
26], based on the correlation of adjacent echoes. This algorithm effectively addresses the issue of iterative redundancy, but its computational complexity increases as the number of azimuthal sampling points increases.
When sparse targets in the forward-looking region are typically the object of interest, RAR super-resolution reconstruction can be equivalently considered as sparse reconstruction problem [
27,
28,
29,
30,
31]. The enhancement of angular resolution can be modeled by introducing target prior information under a regularization framework [
32,
33]. The core of sparse regularization methods lies in selecting appropriate target prior information. To emphasize the sparsity of targets in the scene, most studies choose the
norm as the constraint term within the regularization framework [
34,
35]. To solve the non-differentiable
regularization problem, iterative reweighted algorithm [
36], split Bregman algorithm [
37,
38], iterative shrinkage threshold algorithm [
39], augmented Lagrange algorithm [
40], and majorization–minimization (MM) algorithm [
41,
42] are usually used. However, the above-mentioned methods focus on batch data processing, requiring a large amount of storage space, and may introduce delays due to data collection. As the radar beam systematically scans the imaging region, the increase in data dimensions significantly raises storage requirements and acquisition time. To reduce storage requirements, decrease latency, and achieve real-time imaging, an online reconstruction method based on sparse
regularization is proposed [
43,
44]. However, this method fails to account for the physical correspondence between echo pulses and target grids inherent in the beam-scanning process. The iteration relationship remains fixed, resulting in a significant amount of computational redundancy.
In this paper, an online sparse reconstruction method based on a beam recursive-sliding (BRS) updating framework is proposed to achieve low storage requirements and low latency. First, the antenna measurement matrix is repaired to reduce imaging edge information errors. Then, since the echo signals return from adjacent beamwidths intervals are statistically uncorrelated, the structural properties of the repaired antenna measurement matrix can be utlized to achieve local beam recursive updates. Finally, global beam recursive updating can be achieved through overlap shifting processing to effectively recover the target. Building upon the proposed method, the effective utilization of the correspondence between echo samples and target grid is achieved. While preserving the inherent advantages of the online framework, this algorithm effectively reduces the significant computational redundancy present in traditional online sparse reconstruction methods.
The organizational framework of this paper is presented as follows.
Section 2 formulates the RAR signal model and related works are introduced. In
Section 3, the proposed method is analyzed in detail. In
Section 4 and
Section 5, to verify the advantage of the proposed method, the simulated and experimental results are presented, respectively. Finally,
Section 6 summarizes this paper and presents the conclusions.
2. Azimuth Echo Model and Related Work
The top and side views of the airbone RAR forward-looking imaging geometry model are presented in
Figure 1a,b. And as illustrated in
Figure 1b, the airborne flies along the
y-axis direction, and the
z-axis is altitude direction.
is antenna scanning speed,
v is carrier platform speed,
is pitch angle, and
H is vertical height of the carrier. In addition,
and
are the azimuthal angle and range history at the starting moment, respectively. At time
t,
and
denote the azimuthal angle and range history, respectively.
In
Figure 1b, target
P has a range history that is indicated as
By applying Taylor series approximation to the above equation, we obtain
Meanwhile, RAR, while operating, transmits a chirp signal. Upon completing the scanning process, received echo is represented as
where
signifies the received echo signal whereas
t corresponds to the time in the azimuthal dimension. The time in the range dimension, denoted as
, is related to the speed of light. Meanwhile,
M and
N represent the number of sampling points in the range and azimuth directions, respectively. And
corresponds to amplitude of the
th target,
is wavelength,
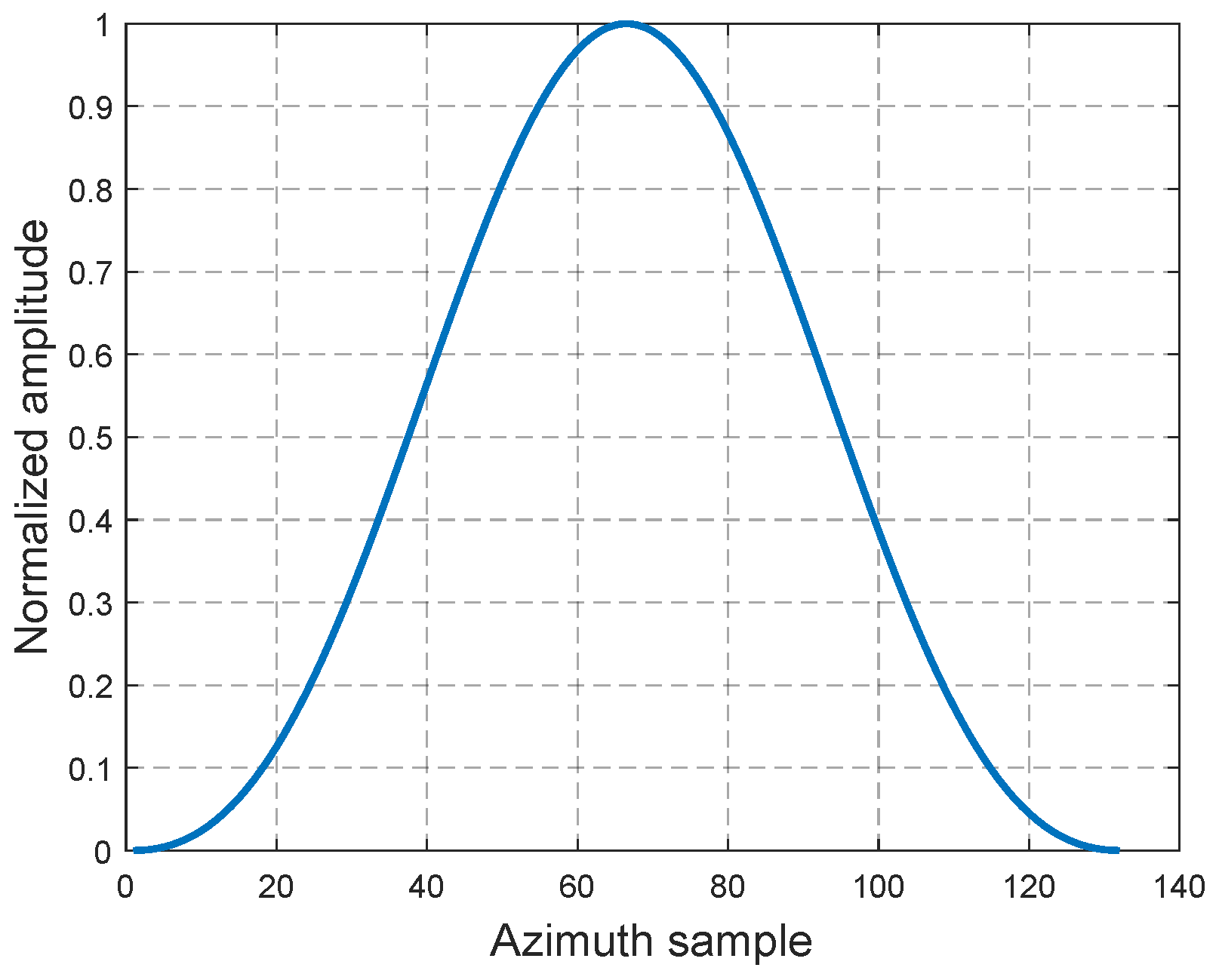
is antenna pattern function, which can be expressed in terms of spatial variables as
,
is carrier frequency,
refers to rectangular window function,
T denotes the pulse width,
is the linear tuning frequency, and
denotes the time delay.
After applying pulse compression and range walk correction to echo signal in model (
3) and utilizing
and
, it can be further represented as
The range walk correction enables the decoupling of the range and azimuth directions, and the range and azimuth echoes can be processed separately. According to Model (
4), the Doppler shift
can be further written as
. As a result, the Doppler shift in any direction in the forward looking region
is almost the same when the platform is low-speed, which can be neglected in practical applications. Meanwhile, to clearly reveal the convolutional characteristics of the azimuth echo signal, the azimuth signal of an arbitrary range bin, when observed along the azimuth direction, can be expressed as
where
denotes the sampling intensity of the
th sampling point of the antenna pattern function. The above expression can be further rewritten in a convolutional form, and by considering additive white noise, it becomes
where ∗ denotes convolution operation.
Therefore, in practical applications, for computational convenience, the signal is discretized, and the
mth range bin’s echo can then be written in a convoluted form as follows:
where
denotes the echo dates,
denotes the target scatterings, and
denotes zero-mean Gaussian white noise. The antenna measurement matrix, denoted as
, can be expressed as follows:
where the samples of the mainlobe antenna pattern are represented by
, the sampling index
L is fundamentally governed by three key system parameters: Pulse Repetition Frequency (PRF), angular beamwidth (
), and antenna’s angular scanning rate
, as expressed by relationship, i.e.,
.
To address the aforementioned challenges, prior research has explored various approaches. In this paper, we first introduce the traditional batch processing sparse regularization method; then, we further deduced its online structure.
2.1. Batch Processing Sparse Regularization Method
Since the relationship between echoes and targets is shown in (
7), the target reconstruction problem is framed as an optimal estimation problem
where (
9) corresponds to the least-square solution [
45] which implements the
norm to regularization to constrain the noise variance. Nevertheless, this is an underdetermined problem, which cannot be directly solved.
To enhance angular resolution, in recent years, based on the sparse characteristics of targets, the Lasso model [
46], by introducing the
norm as a constraint term within the regularization framework, can be represented as
where regularization parameter
governs the weight added to the constraint term. The MM principle, which converts the non-differentiable issue into a smooth one, can be applied to solve the Lasso model in (
10).
Due to the MM principle [
47], the second term in (
10) can be equivalently represented as
where
denotes diagonal loading matrix,
is the result of the
kth iteration for the target.
Thus, Model (
10) is further expressed as
And it can be obtained by calculating the iterative formula as follows:
The batch processing sparse regularization method requires multiple iterations to achieve convergence. And each iteration involves matrix inversion, leading to increased storage requirements and lag in imaging for the RAR system.
2.2. Online Reconstruction Method Based on Sparse Regularization
To reduce storage requirements, decrease latency, and achieve real-time imaging, an online structure for the batch processing sparse
regularization approach is further proposed in [
43,
44].
First, the antenna measurement matrix
is divided into rows. Then, it follows that
, where
denotes the
nth row vector of
. Based on (
10), to perform online sparse estimation, it would be natural to solve
where
denotes the
jth element of the echo
, corresponding to the echo value at the
jth azimuth sampling instant.
From the above analysis, (
14) can be reformulated in an equivalent form as
Here,
, and
represents estimated real-time target scattering coefficients when the
th echo arrives. And the following equation provides the closed-form solution to (
15).
For the solution in (
16), we let
,
, then
. Thus, (
16) can be written as
For the recursion initialization at
, the initialization vector takes the form
The terminal recursion step at
is calculated by the following formula:
Through the above derivation, we obtain the online structure for the batch processing sparse
regularization, and the algorithm flowchart is shown in
Table 1.
Relative to the classical batch processing algorithm, the online sparse regularization algorithm fully exploits the similarity between adjacent echo signals. The initial value of iteration at time equals to estimate value at time n. Adjacent echo pulses are usually close to each other. Therefore, the online sparse regularization algorithm typically requires only 1–2 iterations to obtain better recovery images as the echo pulses continue to increase.
However, with the dimension of echo data continues to increase, the computational burden grows exponentially due to the need for repeated matrix inversions. When facing a high-dimensional echo matrix, the computation time exceeds the data collection time, making it difficult to achieve instant target reconstruction. As a result, the advantages of online updating framework are completely lost, which is clearly unacceptable.
As shown in (
16), the fundamental reason becomes apparent: each iteration of its online process requires solving the inverse of an
th-order matrix, leading to the updating of the temporary global target scattering coefficient which is an
-dimensional vector each time.
3. The Proposed Method
In this section, to overcome the aforementioned issue, by leveraging the correspondence between echo samples and target grids, a beam recursive-sliding (BRS) updating framework is proposed to achieve online fast target reconstruction.
According to the physical scanning process of the RAR system, there exists a correspondence between the echo pulse samples and the target grid. The corresponding relationship is shown in
Figure 2. The reconstruction of a target grid is determined solely by its adjacent
L echo pulse samples, and an echo pulse sample can only influence its corresponding adjacent
L target grids. Therefore, in practice,
echo pulse samples correspond to the reconstruction of
target grid points. Among them, the middle
L target grid points are obtained through traversing complete echoes corresponding to them. So traditional online sparse reconstruction methods suffer from significant computational redundancy during the continuous updating process, leading to the challenge of achieving instant imaging when facing high-dimensional echo matrix.
In this paper, an online beam recursive-sliding (BRS) updating framework is proposed to reduce computational overhead of online sparse reconstruction methods. First, the antenna measurement matrix is repaired to facilitate the effective restoration of edge target grid information; then, by windowing, the effective information of the repaired antenna measurement matrix is extracted, enabling local beam recursive updating; finally, by employing overlap shifting processing, global beam recursive updating is achieved.
3.1. Repair of Antenna Measurement Matrix
In the echo model presented in
Section 2, the antenna measurement matrix used is usually truncated. However, under the proposed online LGBRT updating framework, the target grid points restored by edge echo pulse samples exceed the number of echo samples. Therefore, to reduce the reconstruction error of edge target grids, the antenna measurement matrix
is repaired as
, represented as
Based on the repaired antenna measurement matrix, the local updating framework first restores target grids containing virtual edge targets. Subsequently, the global updating framework employs overlapping sliding processing and applies truncation to the temporarily reconstructed targets, enabling efficient real-time target reconstruction.
3.2. Local Updating Framework Within Unit Echo Region
Based on the above analysis,
echo pulse samples correspond to the reconstruction of
target grid points. Among them, the middle
L target grid points are obtained through traversing complete echoes corresponding to them. Thus, the entire echo region
along one range bin can be divided into several unit echo regions as
where
,
denotes the floor function and the length of vectors
are all
. Furthermore, by completing the target reconstruction within each unit echo region, the target reconstruction for the entire complete echo region can be achieved.
As known from [
48], in (
16),
primarily serves as a sparse constraint on target reconstruction. The online beam recursive updating is mainly determined by
and
. In this process, the updating of
and
is a continuous accumulation, but with each incoming echo pulse, it essentially only updates
and
. By observing the structure of repaired matrix in (
20), we can observe that
contains many zero elements, while non-zero elements are the main part responsible for target reconstruction.
Therefore, when the
th echo pulse sample arrives, we make
windowed and extract the non-zero elements of length
L, denoted as
In this way, the windowed operation yields
,
,
, and
after processing. However, it is important to note that the windowed variables obtained above cannot be directly substituted into (
16) for calculation. Because the repaired antenna measurement matrix
in (
20) is a cyclic shift matrix, the effective non-zero elements of
and
are misaligned in position. This leads to misaligned addition of effective information in the summation processes of
with
and
with
.
Thus, to maintain mathematical consistency between the target reconstruction process of the windowed recursive variables and the original online updating process, when the
th echo pulse sample arrives,
expands towards the bottom-right direction. As shown in
Figure 3, the value of expanded elements is 0, which means
with dimension
expands to
with dimensions
. Similarly,
with dimension
expands towards the upper-left direction to become
with dimension
;
, with dimension
, expands towards the bottom direction to become
with dimension
;
, with dimension
, expands towards the upper direction to become
with dimension
. Its mathematical expression is as follows:
According to the above description, (
19) can be updated to
Therefore, with each online updating traversing through an echo sample pulse, the dimension of the target increases by one order. After updating data points within each unit echo region, the dimension of increases from the initial L order to the order. Thus, the mathematical process of beam recursive updating within the unit echo region is now aligned with the physical process. It is worth noting that if the last unit echo region contains fewer than data points, it can be traversed directly to completion, following the same principle as above.
3.3. Global Updating Framework of the Complete Echo Region
For the
target grids recovered from each unit echo region, the
target grids at its edges are also influenced by other unit echo regions. We let the target grid recovered from the
th unit echo region be denoted as
with dimension of
. So it can be partitioned into
, where
,
, and
are vectors of equal length
L. Similarly, the target grid recovered from the
th unit echo region is
. We define ⊕ as the overlap shifting processing, which can be expressed as
Therefore, the global recursive update result of the complete echo region is
where
,
denotes the floor function and
denotes the sum of overlap shifting processing. At the same time, there exist virtual targets of length
generated at the edges corresponding to the antenna measurement matrix after repaired. Therefore, the final target reconstruction result
is obtained by truncating the middle
N-length vector from
.
Table 2 summarizes the proposed online BRS-based updating framework.
3.4. Analysis of the Operational Complexity and Storage Requirement
It can be seen from the above analysis that the classical batch processing sparse regularization method, the online sparse regularization method, and the proposed method can all obtain super-resolution results. This subsection presents a comparative analysis of computational complexity and storage requirements across the evaluated algorithms.
From the expression of the traditional batch sparse
regularization method in (
11), it can be noted that computational complexity of matrix multiplication and matrix inversion in each iteration is
. And since the iteration times
K typically reaches several tens, the computational complexity of obtaining a full image is
. In particular, batch processing methods can only occur after data collection, resulting in a significant storage requirement for radar data and antenna measurement matrix.
As a comparison, the matrix inversion in (
16) can be performed using the Sherman–Morrison formula [
49] recursively, requiring
computations. Considering that the online structure does not require storing accumulations, the computational complexity for reconstructing the entire image is
. The online sparse
regularization algorithm requires only 1–2 iterations, denoted as
, significantly reducing computational complexity compared to classical batch processing methods. However, due to the typically large number of azimuth points, the computational complexity of the online sparse
regularization method remains high. Fortunately, the online structure allows for direct data processing, thus avoiding the need for storing a large matrix.
Meanwhile, the operational complexity and storage requirements can be further reduced by the proposed online LGBRT-based updating framework. Based on the correspondence between echo pulse samples and target grids, the framework proposed in this paper decompose the global recursive updating of the complete echo region into local recursive updating of multiple unit echo regions. The computational complexity of the proposed framework is
where iteration times
typically only needs 1–2 times,
,
denotes the floor function, and
represents the average computational complexity per iteration process within the unit echo region, which is in the rage of
. Therefore, this method significantly reduces computational complexity while having low storage requirements. The computational complexities of the above three algorithms are summarized in
Table 3. The online processing framework attains true real-time processing while computation time is shorter than the echo acquisition time.
Figure 4 illustrates the flowchart of the proposed algorithm.
5. Experimental Data
The preceding simulations validate the effectiveness of the proposed algorithm. This section further validates the reliability of the proposed algorithm through experiments. The radar used in the experiment operates in a ring-scanning mode, with its system parameters listed in
Table 8.
The experiment was conducted in the South Second Gate parking lot of the University of Electronic Science and Technology of China, Chengdu, China. The experimental scenario is shown in
Figure 9a, where the distant area contains complex scenes such as houses, vehicles, and flowerbeds. The nearby area is relatively open, and we placed four corner reflectors within this space as sparse targets.
Meanwhile, the experiment employed an X-band radar, with the physical setup depicted in
Figure 9b. The radar scans in a circular pattern with a certain downward angle, obtaining real beam result of the experiment.
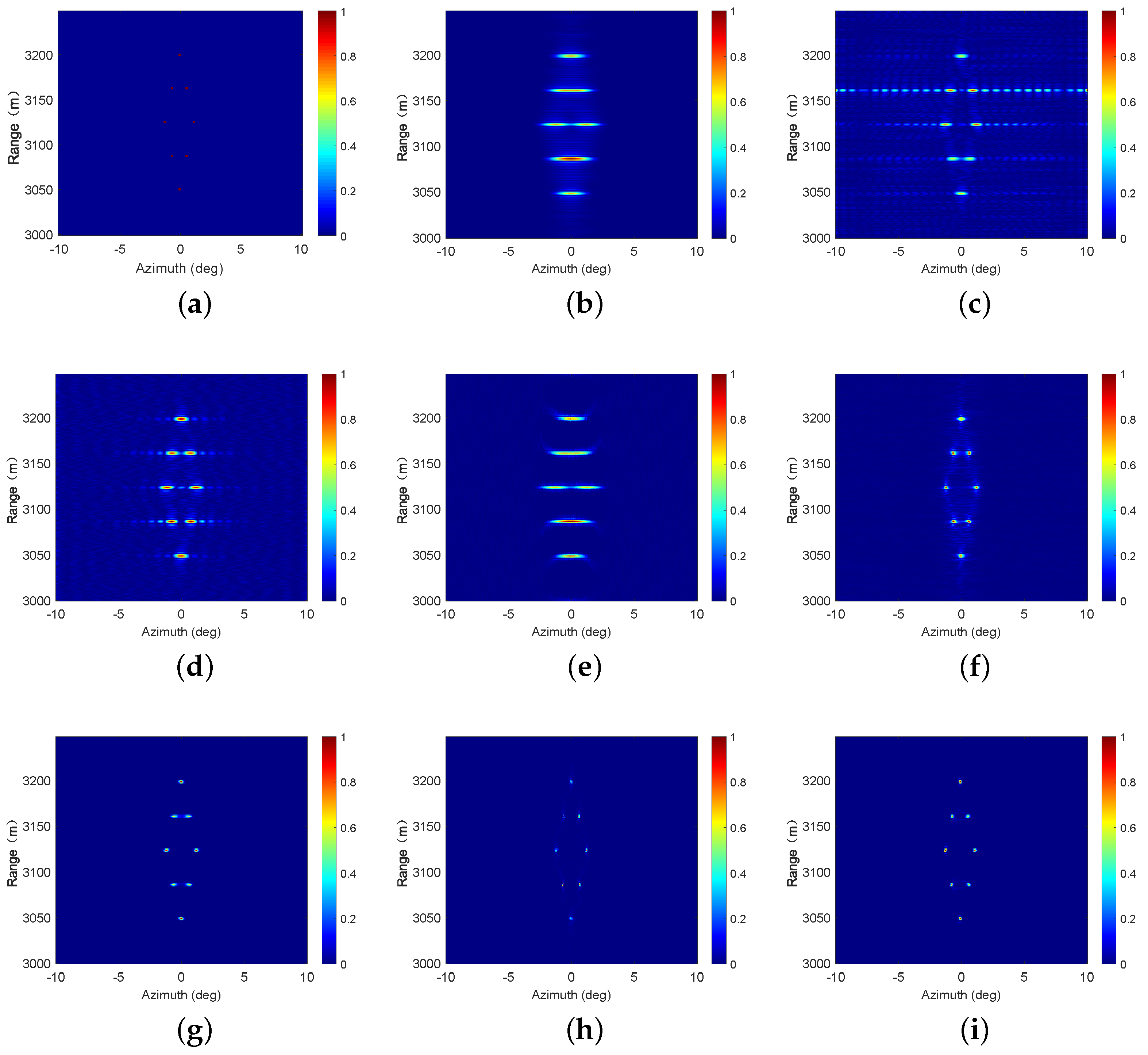
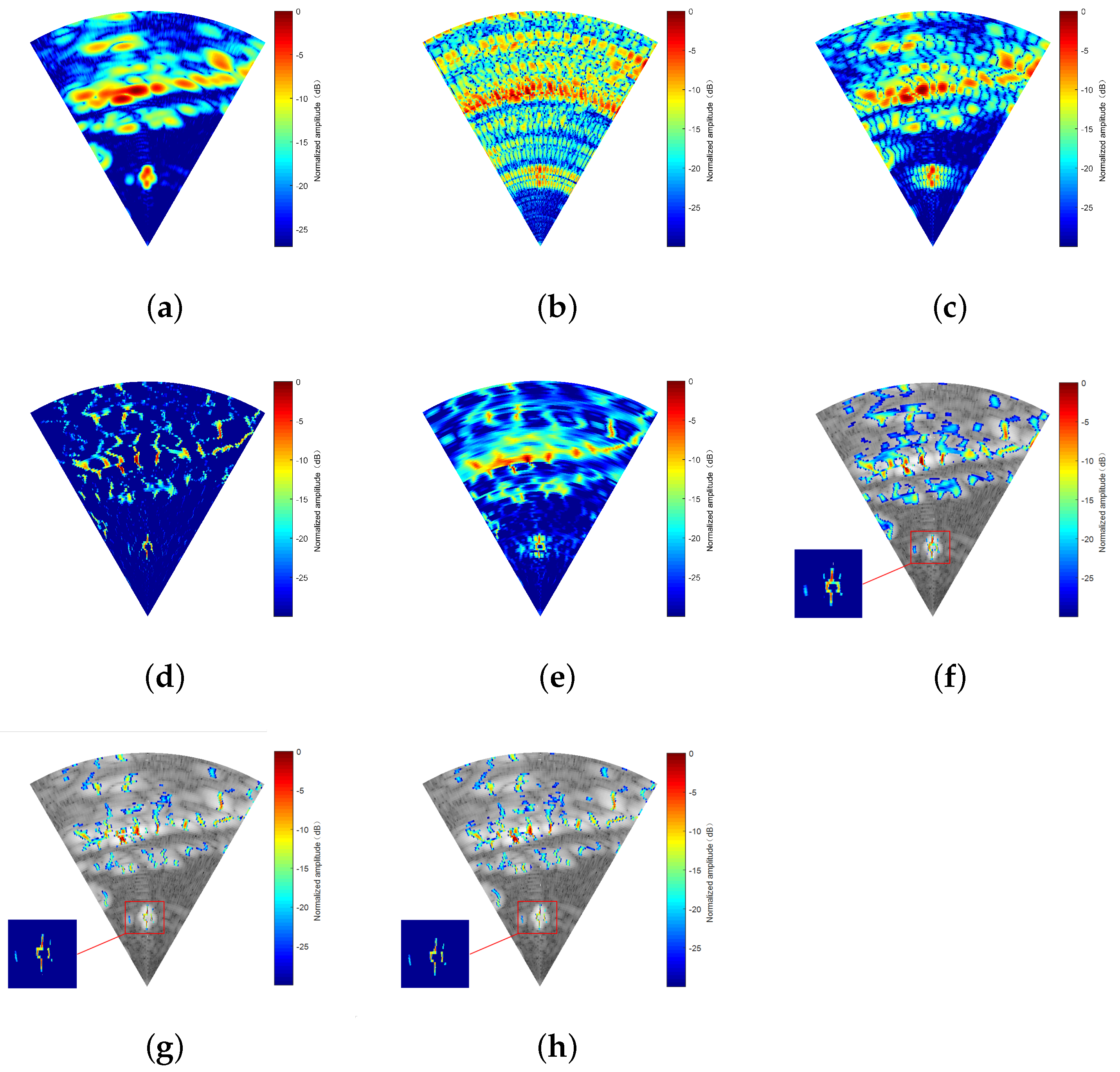
Figure 10 presentes the experimental results, with a matrix dimension of
(range × azimuth). As presented in
Figure 10a, the real beam echo in this region exhibits low resolution and high noise levels, making it almost difficult to discern targets.
Figure 10b–h are the reconstructed target results after processing the real beam echoes using various algorithms. In
Figure 10b, the TSVD method results in highly cluttered reconstructed targets due to its high side lobes. As shown in
Figure 10c, the REGU algorithm exhibits a certain degree of side lobe suppression. The image quality is significantly enhanced compared to that obtained using the TSVD algorithm, although its resolution enhancement is still relatively limited.
Figure 10d presents the results obtained using the Lucy method, which exhibits some suppression of side lobes. However, the lower resolution prevents it from obtaining a satisfactory image.
Figure 10e is the result of the IAA algorithm, with an improved resolution enhancement. However, it fails to suppress the strong noise, and significant residual shadows are present in the image. In
Figure 10f–h, to demonstrate the improvement achieved by the
-based methods, the real beam data are merged in the bottom layer.
Figure 10f represents the result of the batch processing sparse
regularization algorithm, which effectively distinguishes the sparse targets. But there is still some merging between the targets, as shown in the enlarged part.
Figure 10g,h display the results of the online sparse
regularization algorithm and the proposed algorithm, respectively. It can be observed that both algorithms exhibit a significant improvement in resolution. However, the online sparse
regularization algorithm used to generate
Figure 10g imposes a substantial computational burden due to its online structure, while the proposed algorithm used to generate
Figure 10h effectively addresses this issue based on the LGBRT framework. Meanwhile, compared with the online sparse
regularization algorithm, the ET of the proposed algorithm decreases from 185.62 s to 36.41 s.
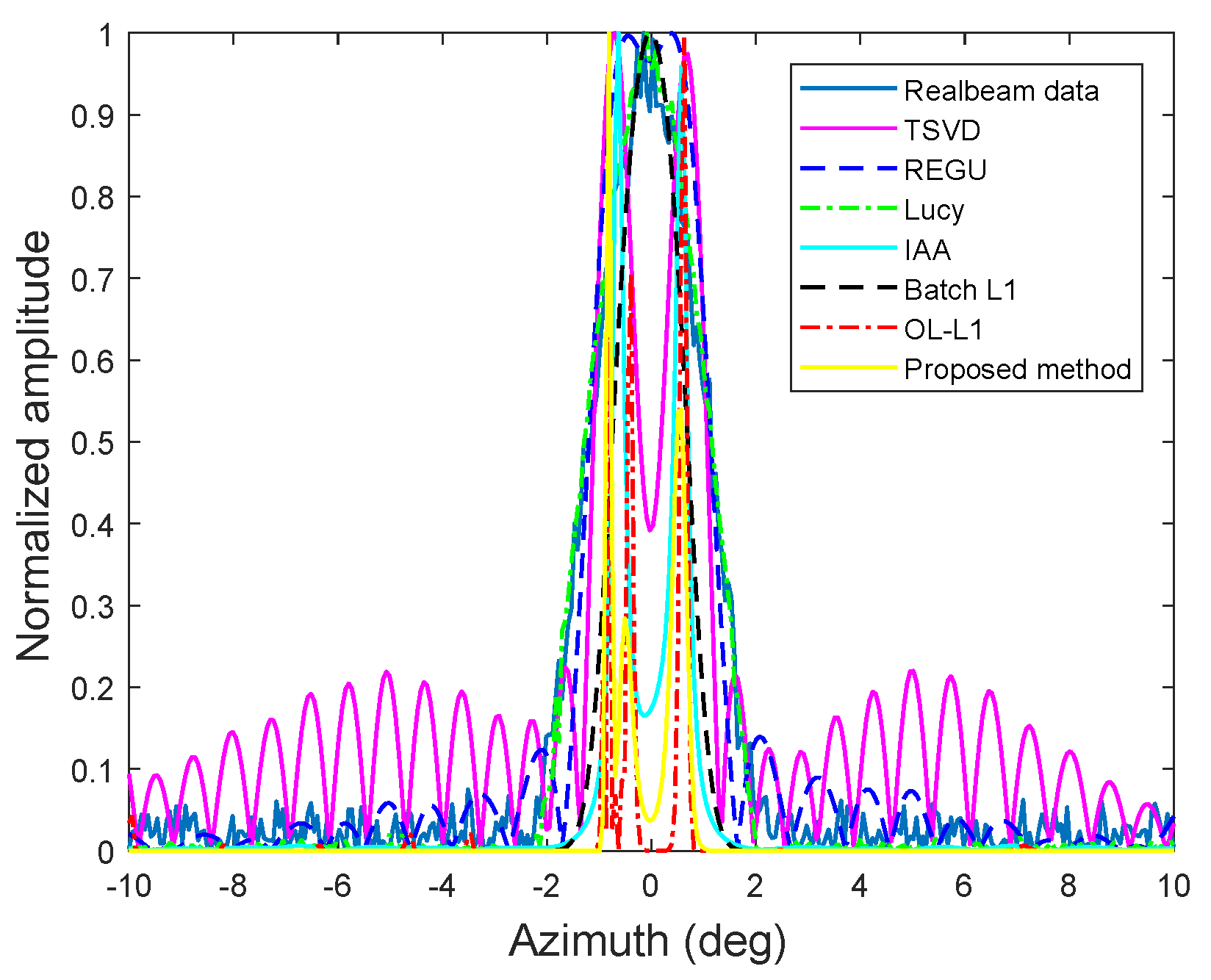
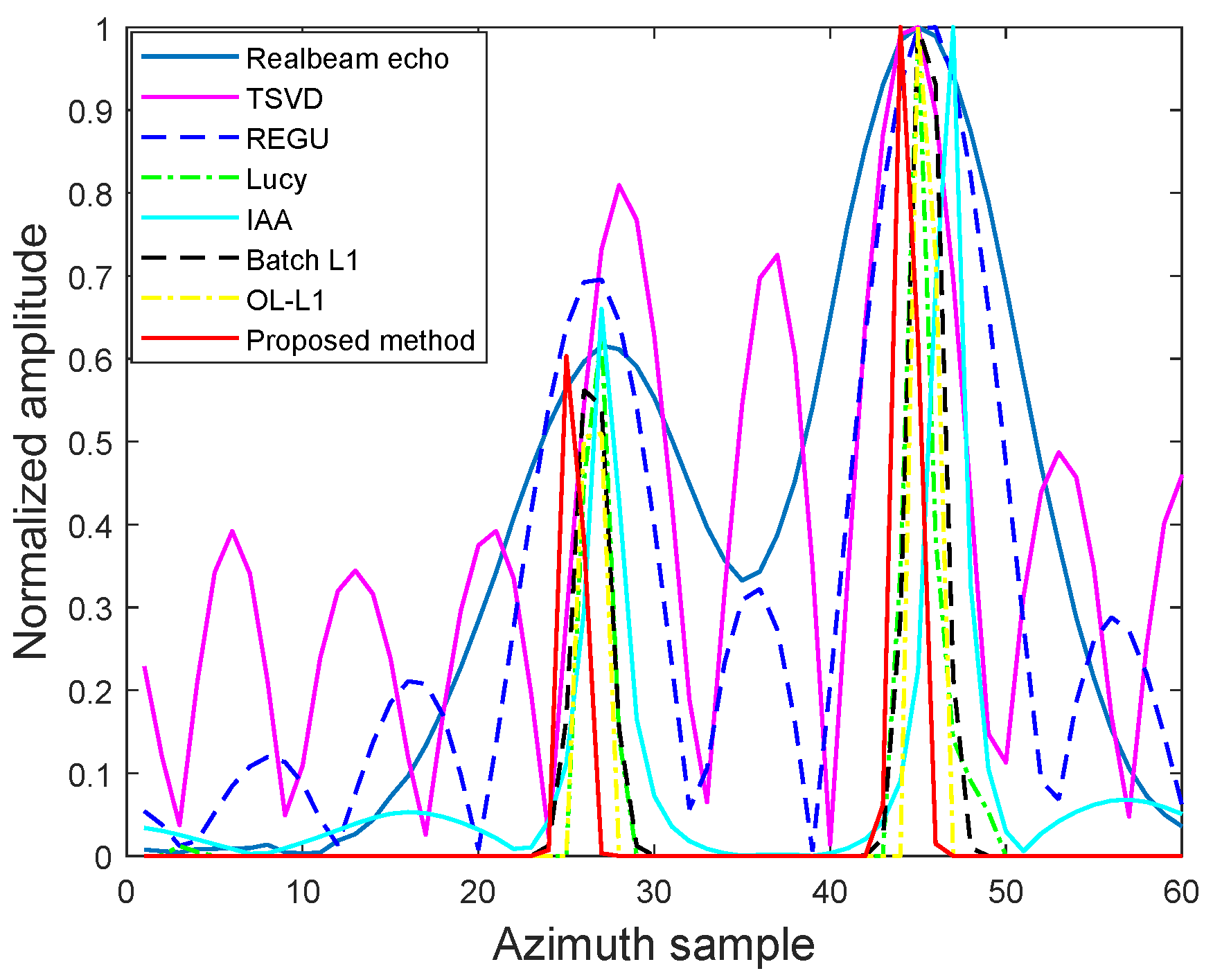
To further provide an intuitive comparison of the reconstruction performance across different algorithms,
Figure 11 presents the profiles of the targets at a range of 27 m. It can be seen that the proposed algorithm not only successfully distinguishes the sparse targets but also has the narrowest beam width, undoubtedly demonstrating its outstanding reconstruction performance. Hence, the experimental data processing results also prove the effectiveness of the proposed method.
6. Conclusions
This paper introduces an online BRS-based updating framework aimed at improving computational efficiency and reducing storage requirements in target reconstruction for RAR. First, by incorporating sparse prior information into the regularization framework, the target reconstruction problem can be reformulated as an -norm minimization issue. Then, an online structure of sparse regularization model is further proposed. Finally, based on the correspondence between echo pulse samples and target grids, the framework proposed in this article decomposes the global recursive updating of the complete echo region into local recursive updating of multiple unit echo regions, so it effectively achieves online fast target reconstruction.
To evaluate the effectiveness of the proposed algorithm, this paper presents the result simulation and experimental data which indicate that the proposed algorithm exhibits comparable target reconstruction performance to the online sparse regularization method. Consequently, the primary advantage of the proposed method lies in its approximately sixfold improvement in computational speed compared to the conventional online sparse regularization approach. Moreover, it enables real-time target reconstruction during beam scanning without incurring processor latency. However, the current derivation of this framework is limited to the online regularization algorithm, which somewhat restricts its generality. In future work, leveraging the inherent physical consistency of scanning radar systems, we aim to extend this framework into a more generalized version applicable to a wider range of target reconstruction algorithms.



 ,
, 



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}