
A Refined Terrace Extraction Method Based on a Local Optimization Model Using GF-2 Images


 ,
,  and
and
Abstract
1. Introduction
- (1)
- By utilizing GF-2 images, this study achieved the precise extraction of terrace patches and incorporated DEM data during both the training and prediction stages phases to improve enhance the accuracy of terrace extraction.
- (2)
- Five deep learning models—U-Net, U-Net++, TransUNet, DeepLabV3+, and PSPNet were employed as baseline models to extract detailed terrace patches from GF-2 images. Subsequently, local information was then extracted by incorporating morphological, textural, and spectral features, thereby addressing issues of poor adhesion and edge segmentation. The model architecture and loss function were refined to achieve high-quality terrace mapping.
- (3)
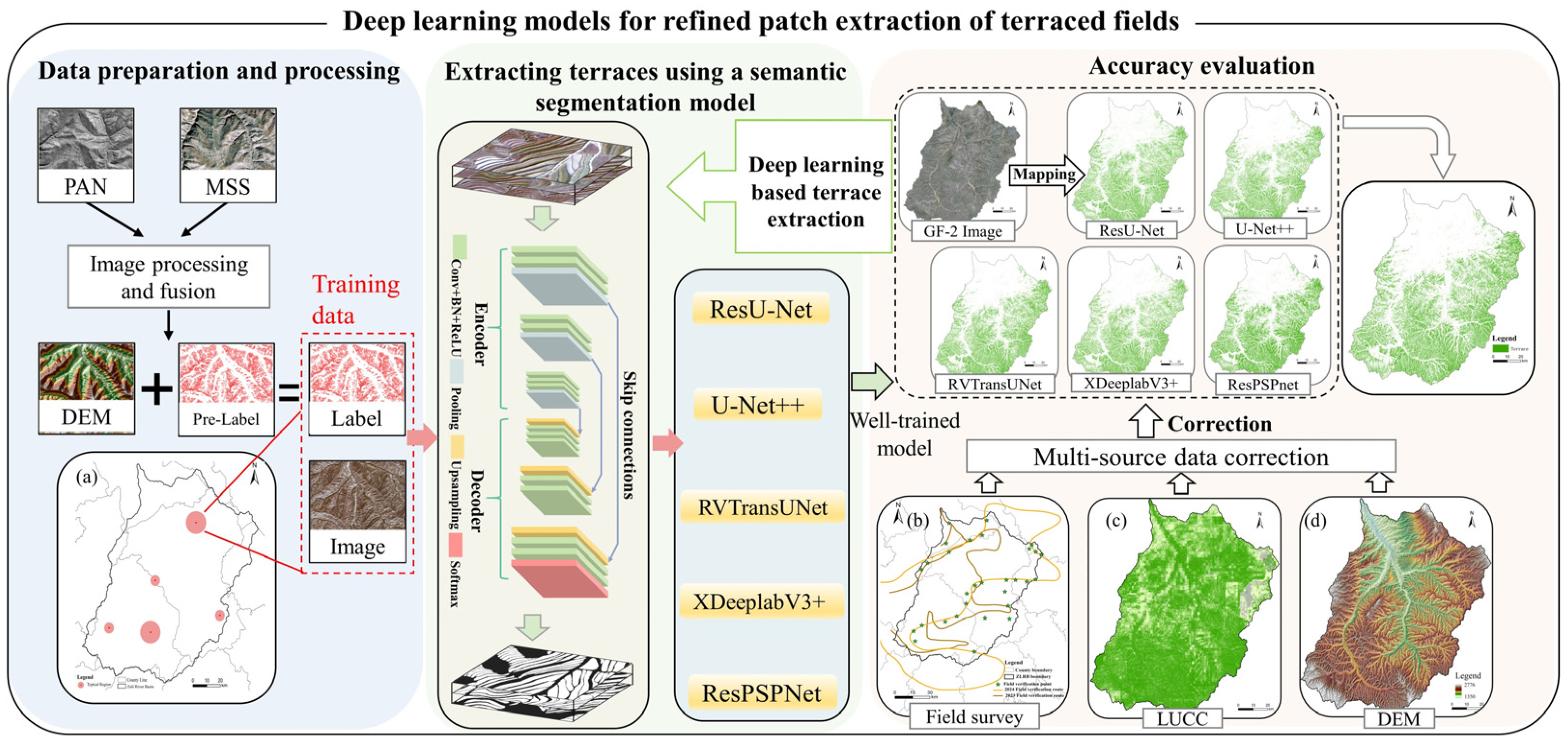
- Multi-source data integration was utilized to evaluate assess model performance through visual inspection, field surveys, and confusion matrix evaluation. Remote sensing data and topographic elements were leveraged for correction and optimization.
- (4)
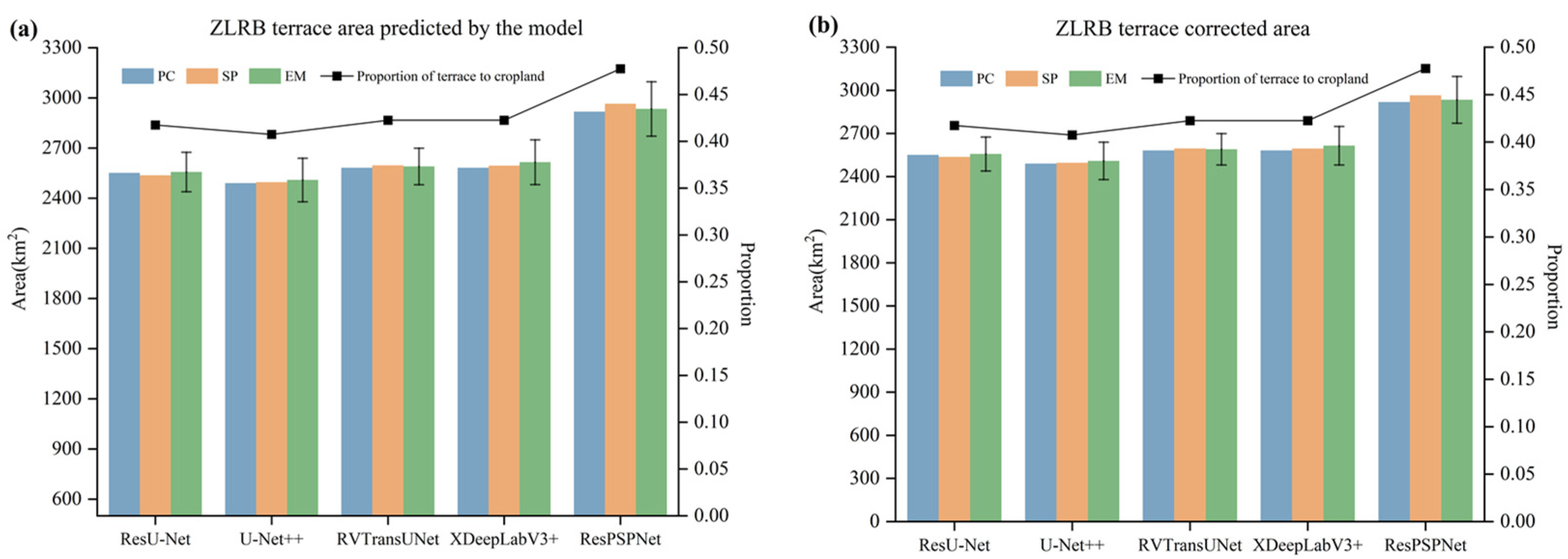
- The terrace area was quantified using pixel counting (PC), sample proportion (SP), and error matrix-based model-assisted estimation (EM).
2. Materials and Methods
2.1. Study Area
2.2. Data Source
2.2.1. GF-2 RS Image Sources and Preprocessing
2.2.2. SinoLC-1(LUCC Data) and DEM Data
2.3. Methods
2.3.1. Dataset Construction
2.3.2. Development of a DL Model for Enhanced Extraction of Terraced Fields
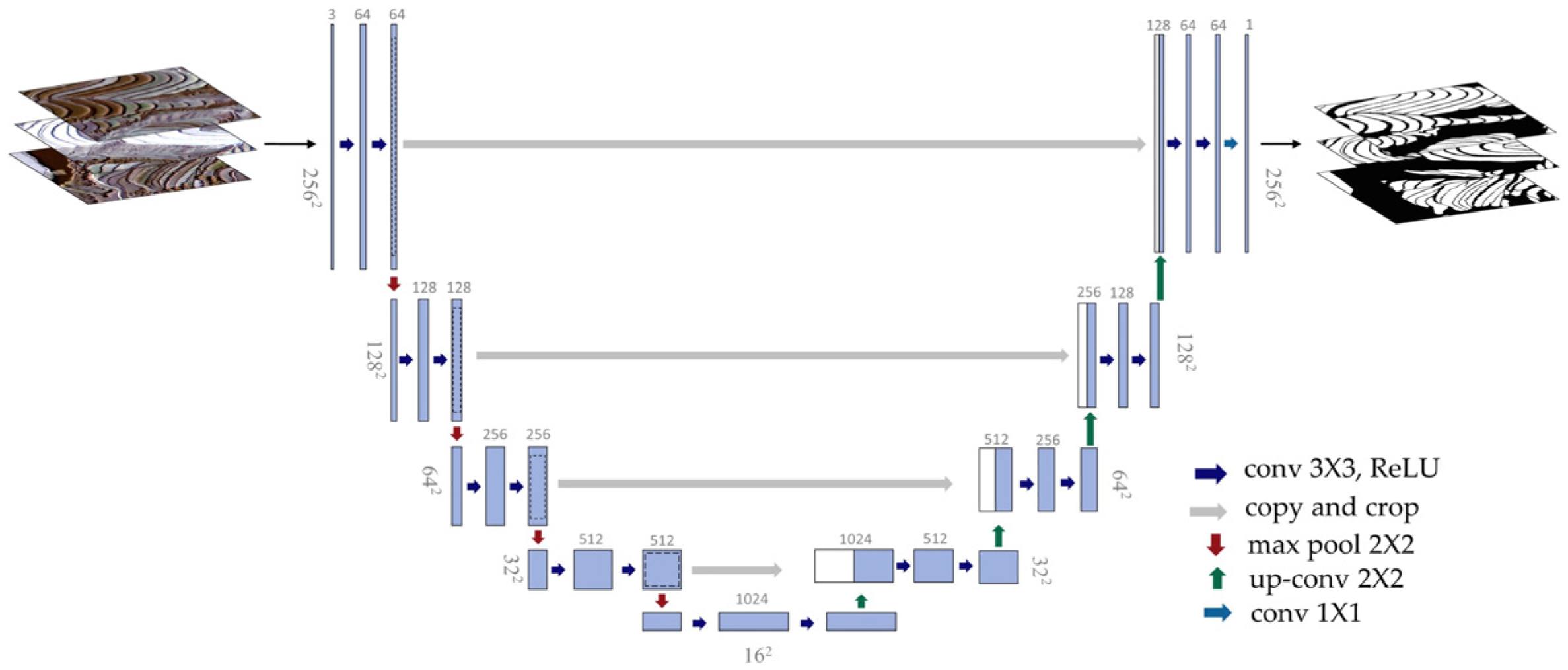
- ResU-Net
- 2.
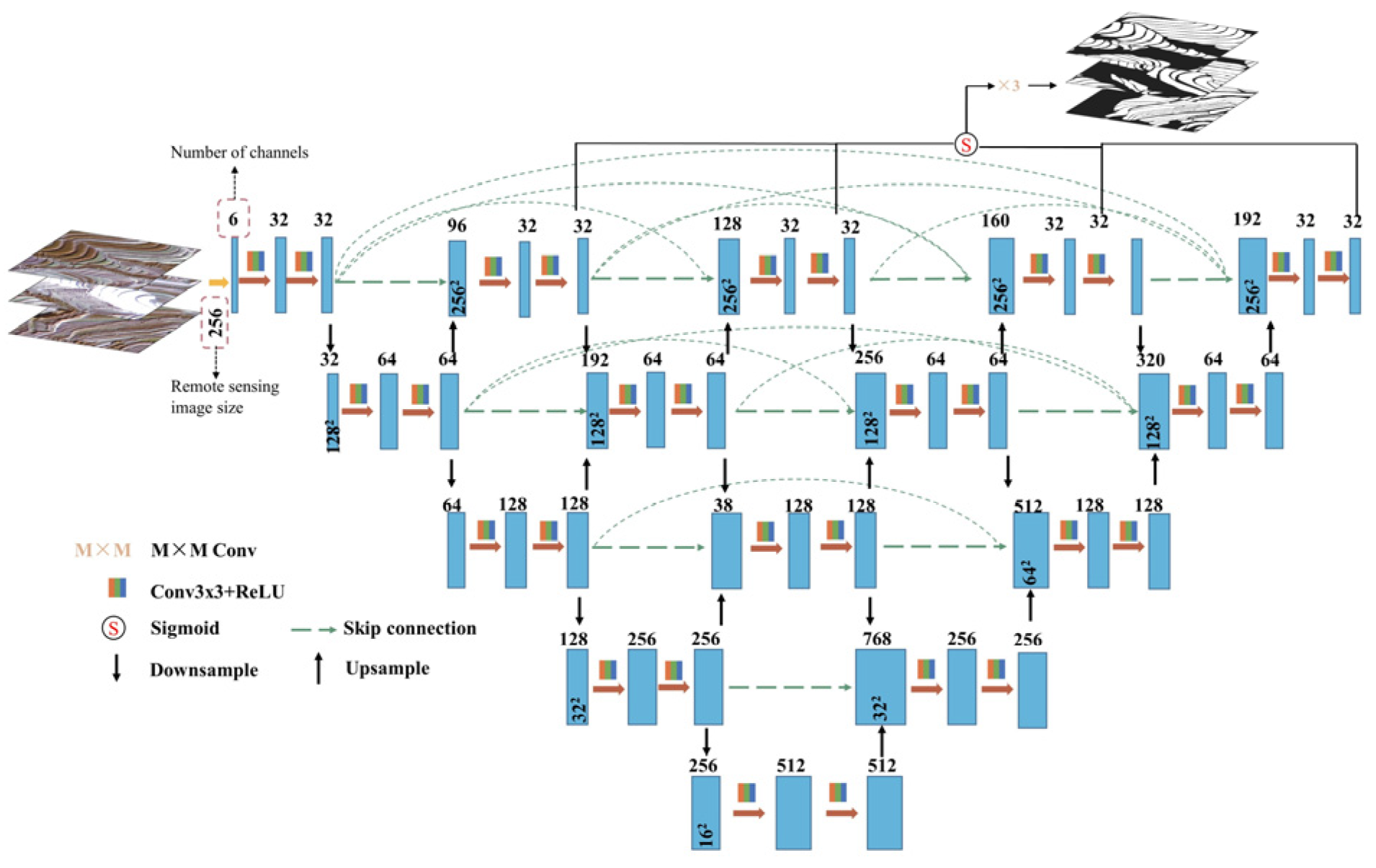
- U-Net++
- 3.
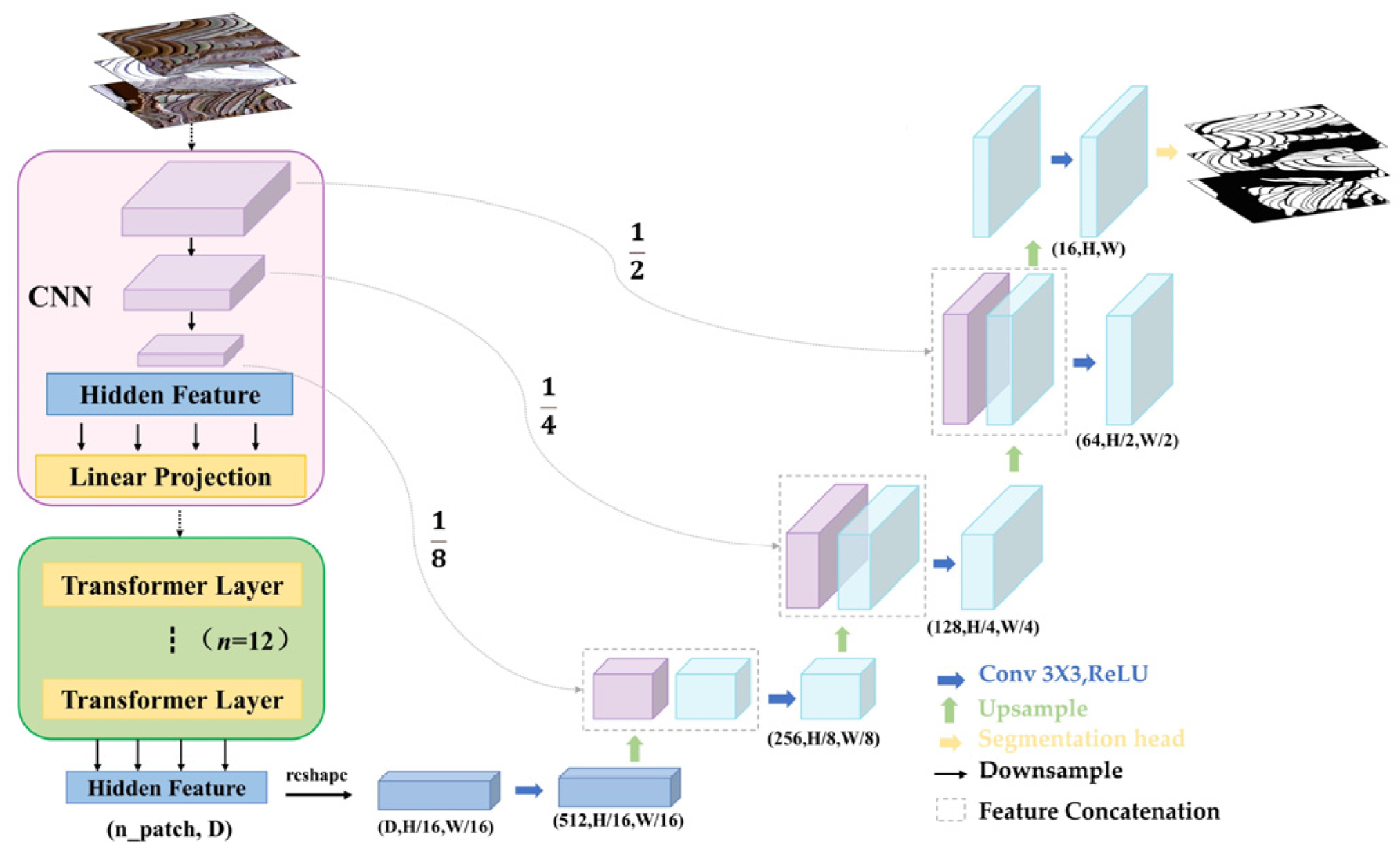
- RVTransUNet
- 4.
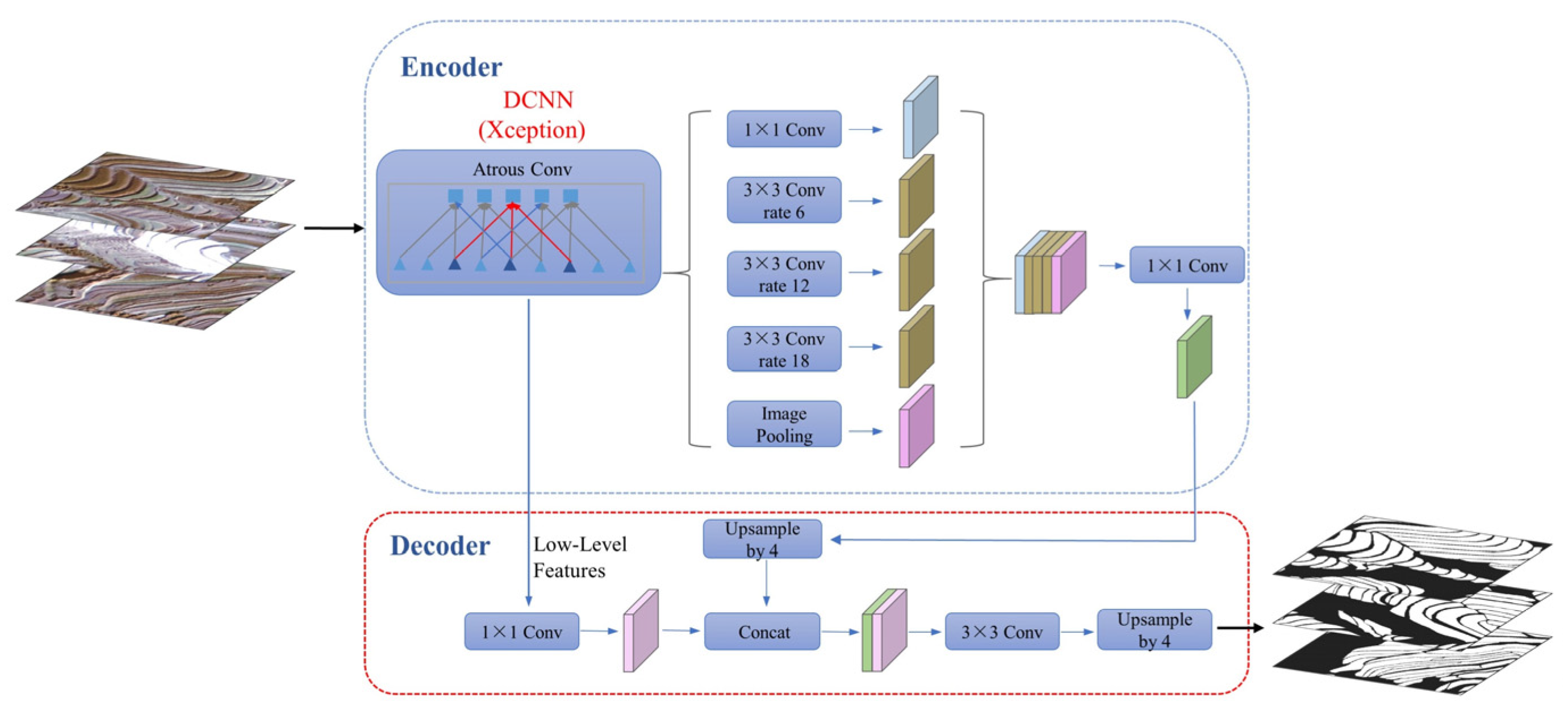
- XDeepLabV3+
- 5.
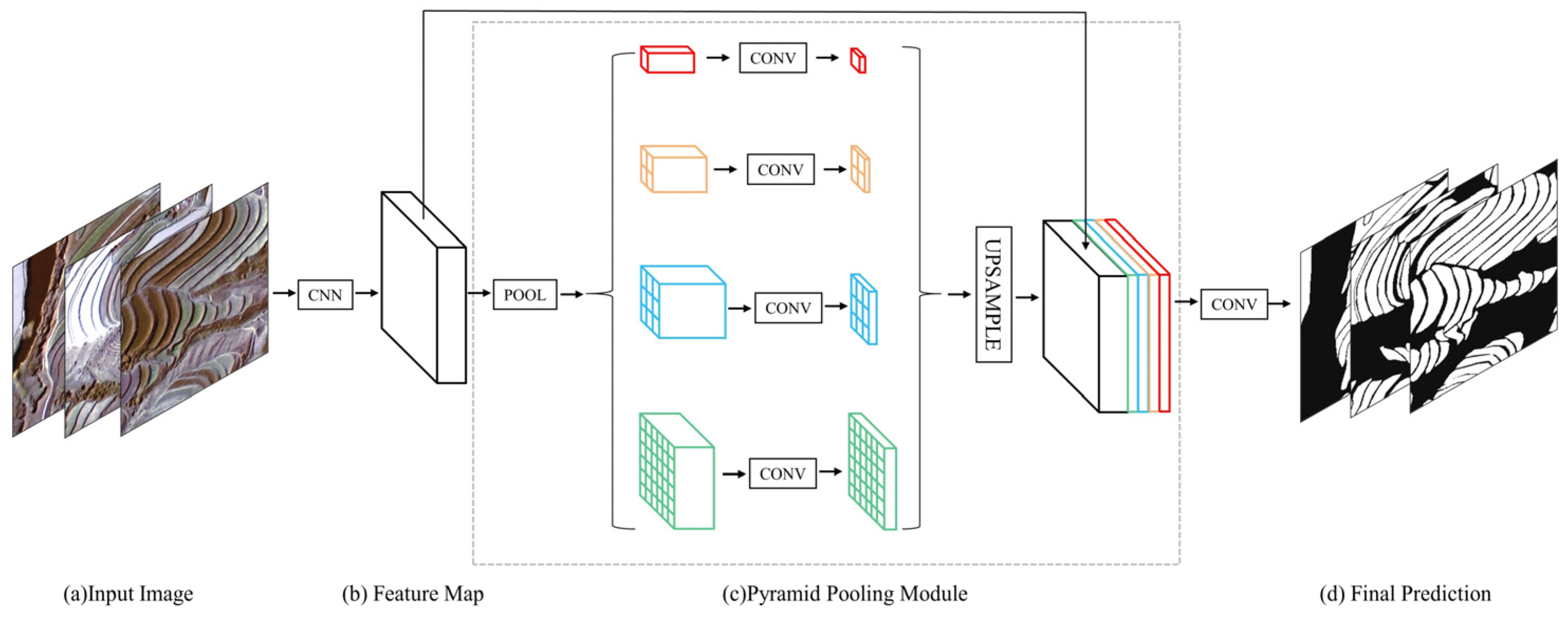
- ResPSPNet
- 6.
- Loss function
2.3.3. Post-Processing
2.3.4. Estimation of Terrace Area
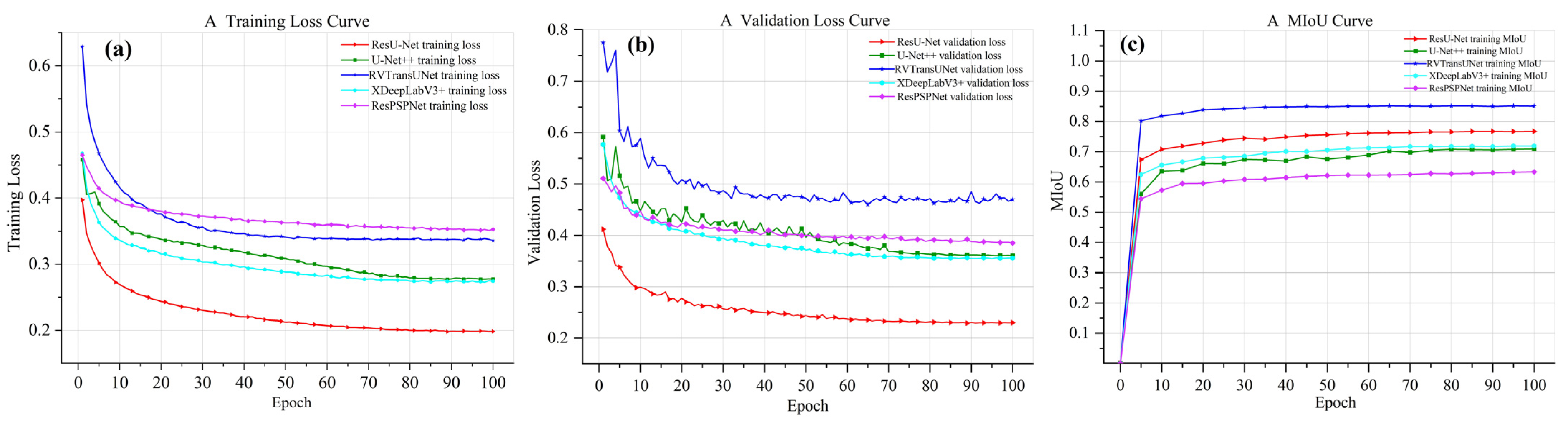
2.3.5. DL Model Training
2.3.6. DL Model Evaluation
3. Results
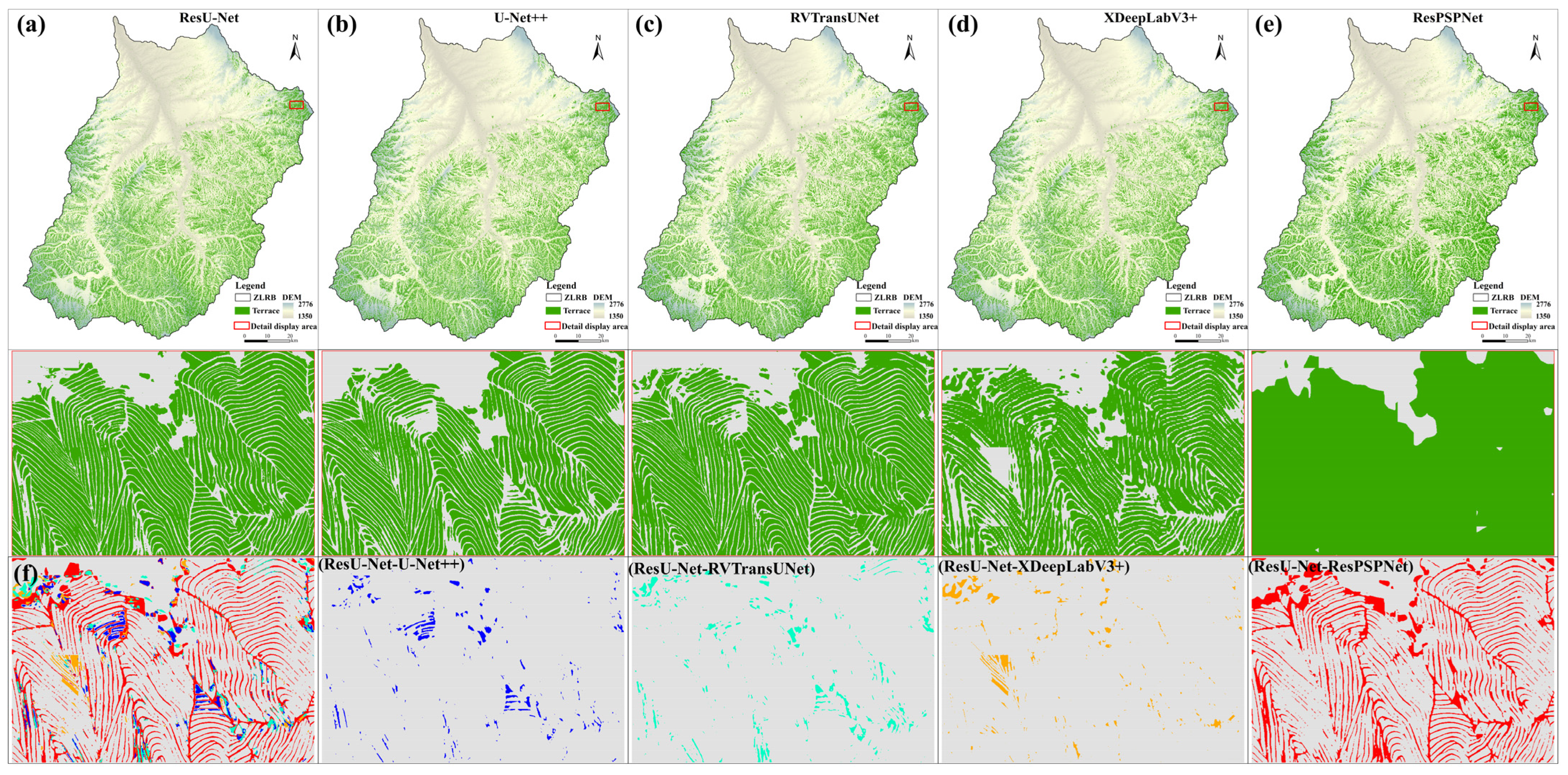
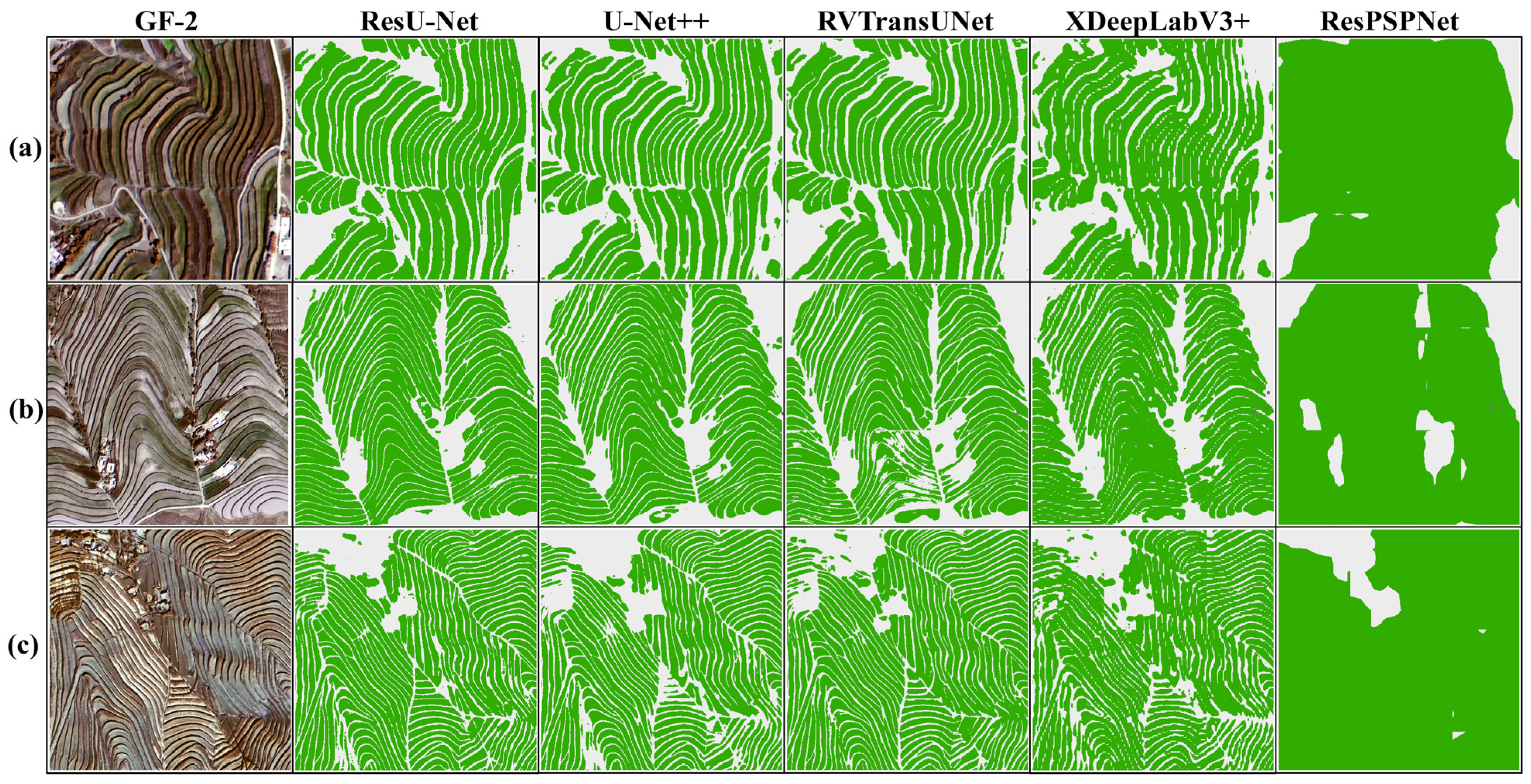
3.1. Comparing Extraction Results of These Five Models
3.2. Model Accuracy Assessment
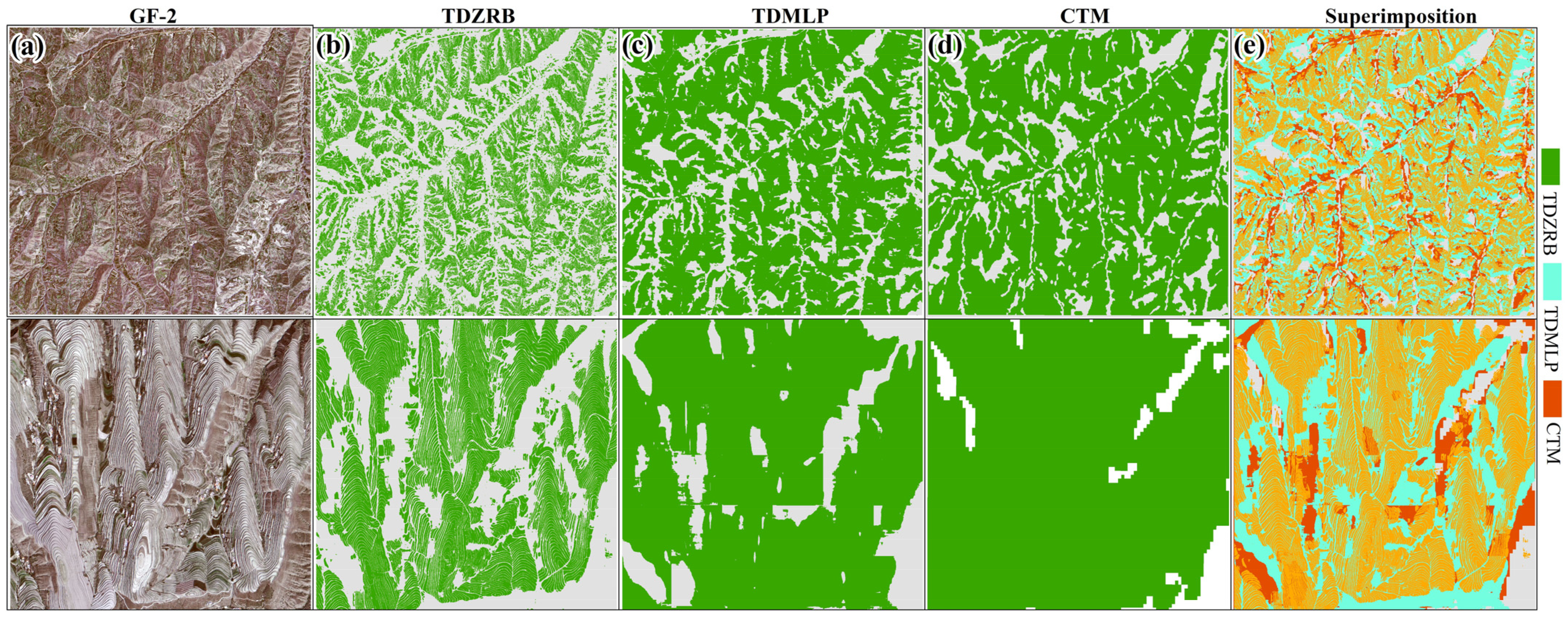
3.3. Verification and Correction of Terrace Data
3.4. Estimation of Terraced Areas in the ZLRB
4. Discussion
4.1. Comparison with Other Terrace Extraction Results
4.2. Error Source Analysis of Terrace Extraction Results
4.3. Limitations and Future Research Directions
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Advantages | Disadvantages |
|---|---|---|
| ResU-Net | Incorporates residual connections, enhancing feature extraction capabilities and enabling precise processing of terrace edges and details. Utilizes pre-trained weights to accelerate convergence and improve generalization. Excels at handling small objects and complex terrains, delivering the highest accuracy in terrace extraction. | Requires relatively higher computational resources due to its complex network structure. |
| U-Net++ | Introduces dense skip connections and deep supervision, which improve multi-scale feature extraction and boundary detection. Strong capability in capturing intricate image details. | Slightly less effective in extracting small objects compared to ResU-Net. Higher training complexity. |
| RVTransUNet | Combines CNN and Transformer modules, effectively capturing both local features and global dependencies. Demonstrates strong generalization and adaptability to diverse datasets. | Higher computational demands and less effective at preserving small object details and boundaries compared to ResU-Net. |
| XDeepLabV3+ | Adopts deep separable convolution for efficient feature learning and multi-scale processing. Performs well in capturing spatial information in high-resolution images. | Lower boundary localization accuracy and reduced effectiveness in extracting small objects compared to ResU-Net. |
| ResPSPNet | Integrates multi-scale feature information through pyramid pooling and employs a lightweight structure for improved processing efficiency. Mitigates gradient vanishing issues for better feature learning. | Prone to losing details of small objects and more susceptible to misclassification in complex backgrounds. |
Appendix B
Appendix C
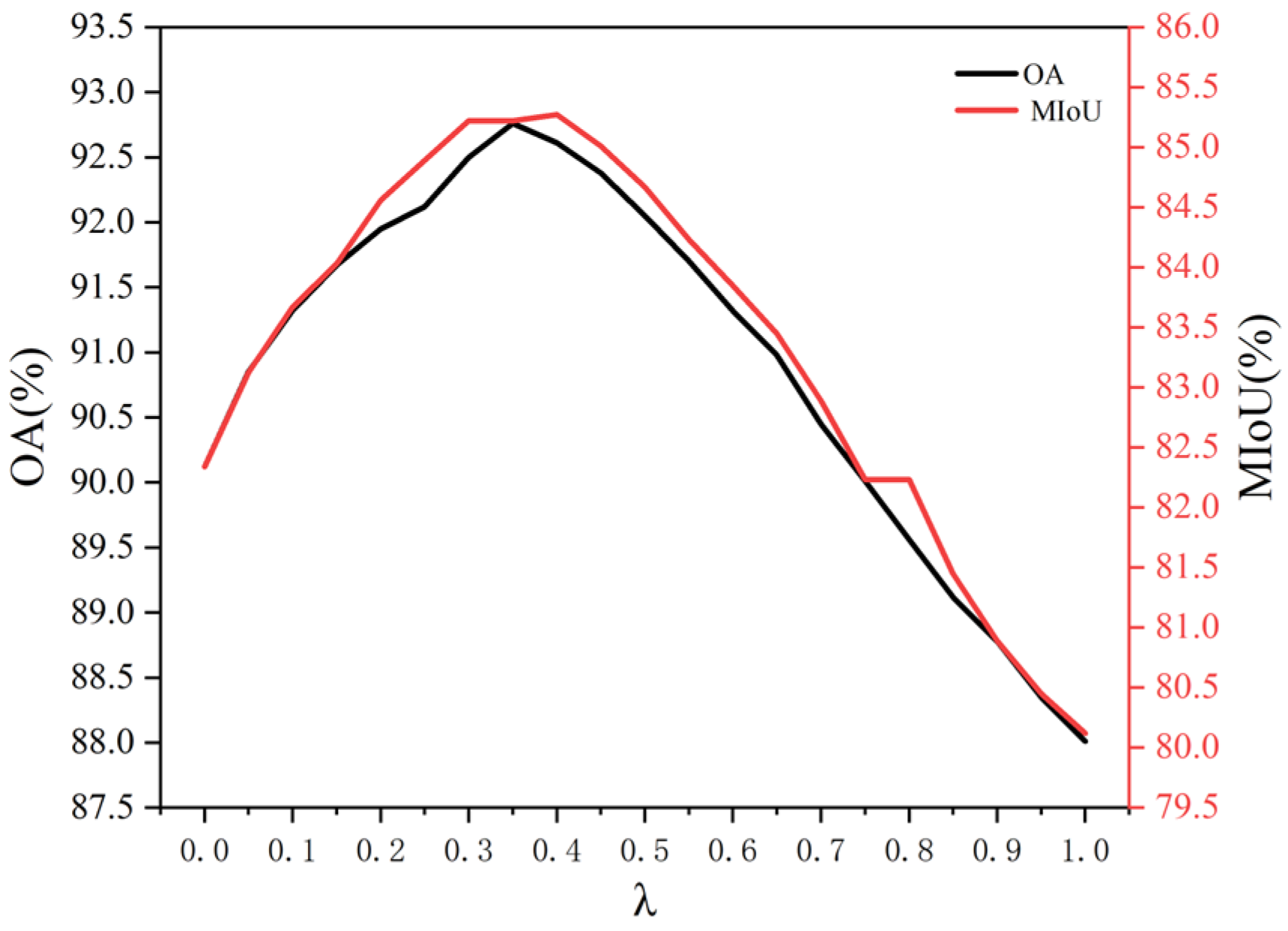
| Dataset | Optimal λ Value | OA | MIoU |
|---|---|---|---|
| This research dataset | 0.35 | 92.76% | 85.41% |
| Denotes the vegetation area | 0.30 | 91.23% | 83.72% |
| Bare ground | 0.40 | 90.89% | 84.12% |
References
- Petanidou, T.; Kizos, T.; Soulakellis, N. Socioeconomic dimensions of changes in the agricultural landscape of the Mediterranean basin: A case study of the abandonment of cultivation terraces on Nisyros Island, Greece. Environ. Manag. 2008, 41, 250–266. [Google Scholar] [CrossRef]
- Ren, W.; Yang, A.; Wang, Y. Spatial Patterns, Drivers, and Sustainable Utilization of Terrace Abandonment in Mountainous Areas of Southwest China. Land 2024, 13, 283. [Google Scholar] [CrossRef]
- Deng, C.; Zhang, G.; Liu, Y.; Nie, X.; Li, Z.; Liu, J.; Zhu, D. Advantages and disadvantages of terracing: A comprehensive review. Int. Soil Water Conserv. Res. 2021, 9, 344–359. [Google Scholar] [CrossRef]
- Wei, W.; Chen, D.; Wang, L.; Daryanto, S.; Chen, L.; Yu, Y.; Lu, Y.; Feng, T. Global synthesis of the classifications, distributions, benefits and issues of terracing. Earth-Sci. Rev. 2016, 159, 388–403. [Google Scholar] [CrossRef]
- Feng, J.; Wei, W.; Pan, D. Effects of rainfall and terracing-vegetation combinations on water erosion in a loess hilly area, China. J. Environ. Manag. 2020, 261, 110247. [Google Scholar] [CrossRef] [PubMed]
- Wolka, K.; Mulder, J.; Biazin, B. Effects of soil and water conservation techniques on crop yield, runoff and soil loss in Sub-Saharan Africa: A review. Agric. Water Manag. 2018, 207, 67–79. [Google Scholar] [CrossRef]
- Chen, D.; Wei, W.; Daryanto, S.; Tarolli, P. Does terracing enhance soil organic carbon sequestration? A national-scale data analysis in China. Sci. Total Environ. 2020, 721, 137751. [Google Scholar] [CrossRef] [PubMed]
- Tarolli, P.; Pijl, A.; Cucchiaro, S.; Wei, W. Slope instabilities in steep cultivation systems: Process classification and opportunities from remote sensing. Land Degrad. Dev. 2021, 32, 1368–1388. [Google Scholar] [CrossRef]
- Ministry of Water Resources of the People’s Republic of China. National Soil Erosion Dynamic Monitoring Results for 2020. Available online: http://www.mwr.gov.cn/xw/slyw/202106/t20210608_1521925.html (accessed on 9 December 2024).
- Xu, G.; Zhang, T.; Li, Z.; Li, P.; Cheng, Y.; Cheng, S. Temporal and spatial characteristics of soil water content in diverse soil layers on land terraces of the Loess Plateau, China. Catena 2017, 158, 20–29. [Google Scholar] [CrossRef]
- Li, Z.; Chen, B.; Wu, S.; Su, M.; Chen, J.M.; Xu, B. Deep learning for urban land use category classification: A review and experimental assessment. Remote Sens. Environ. 2024, 311, 114290. [Google Scholar] [CrossRef]
- Mohiuddin, G.; Mund, J.P. Spatiotemporal analysis of land surface temperature in response to land use and land cover changes: A remote sensing approach. Remote Sens. 2024, 16, 1286. [Google Scholar] [CrossRef]
- Martínez-Casasnovas, J.A.; Ramos, M.C.; Cots-Folch, R. Influence of the EU CAP on Terrain Morphology and Vineyard Cultivation in the Priorat Region of NE Spain. Land Use Policy 2010, 27, 11–21. [Google Scholar] [CrossRef]
- Agnoletti, M.; Cargnello, G.; Gardin, L.; Santoro, A.; Bazzoffi, P.; Sansone, L.; Pezza, L.; Belfiore, N. Traditional landscape and rural development: Comparative study in three terraced areas in northern, central and southern Italy to evaluate the efficacy of GAEC standard 4.4 of cross compliance. Ital. J. Agron. 2011, 6, e16. [Google Scholar] [CrossRef]
- Zhao, B.; Ma, N.; Yang, J.; Li, Z.; Wang, Q. Extracting features of soil and water conservation measures from remote sensing images of different resolution levels: Accuracy analysis. Bull. Soil Water Conserv. 2012, 32, 154–157. [Google Scholar]
- Li, Y.; Gong, J.; Wang, D.; An, L.; Li, R. Sloping farmland identification using hierarchical classification in the Xi-He region of China. Int. J. Remote Sens. 2013, 34, 545–562. [Google Scholar] [CrossRef]
- Luo, L.; Li, F.; Dai, Z.; Yang, X.; Liu, W.; Fang, X. Terrace Extraction Based on Remote Sensing Images and Digital Elevation Model in the Loess Plateau, China. Earth Sci. Inform. 2020, 13, 433–446. [Google Scholar] [CrossRef]
- Zhang, Y.; Shi, M.; Zhao, X.; Wang, X.; Luo, Z.; Zhao, Y. Methods for automatic identification and extraction of terraces from high spatial resolution satellite data (China-GF-1). Int. Soil Water Conserv. Res. 2017, 5, 17–25. [Google Scholar] [CrossRef]
- Zhang, X.; Liu, L.; Chen, X.; Gao, Y.; Xie, S.; Mi, J. GLC_FCS30: Global land-cover product with fine classification system at 30 m using time-series Landsat imagery, Earth Syst. Sci. Data 2021, 13, 2753–2776. [Google Scholar] [CrossRef]
- Eckert, S.; Ghebremicael, S.T.; Hurni, H.; Kohler, T. Identification and classification of structural soil conservation measures based on very high-resolution stereo satellite data. J. Environ. Manag. 2017, 193, 592–606. [Google Scholar] [CrossRef]
- Zhao, H.; Fang, X.; Ding, H.; Strobl, J.; Xiong, L.; Na, J.; Tang, G. Extraction of terraces on the Loess Plateau from high-resolution DEMs and imagery utilizing object-based image analysis. ISPRS Int. J. Geo-Inf. 2017, 6, 157. [Google Scholar] [CrossRef]
- Sheikh, M.A.A.; Maity, T.; Kole, A. IRU-Net: An efficient end-to-end network for automatic building extraction from remote sensing images. IEEE Access 2022, 10, 37811–37828. [Google Scholar] [CrossRef]
- Band, S.S.; Janizadeh, S.; Chandra Pal, S.; Saha, A.; Chakrabortty, R.; Shokri, M.; Mosavi, A. Novel ensemble approach of deep learning neural network (DLNN) model and particle swarm optimization (PSO) algorithm for prediction of gully erosion susceptibility. Sensors 2020, 20, 5609. [Google Scholar] [CrossRef]
- Do, H.T.; Raghavan, V.; Yonezawa, G. Pixel-based and object-based terrace extraction using feed-forward deep neural network. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, 4, 1–7. [Google Scholar] [CrossRef]
- Huang, F.; Zhang, J.; Zhou, C.; Wang, Y.; Huang, J.; Zhu, L. A deep learning algorithm using a fully connected sparse autoencoder neural network for landslide susceptibility prediction. Landslides 2020, 17, 217–229. [Google Scholar] [CrossRef]
- Yu, M.; Rui, X.; Xie, W.; Xu, X.; Wei, W. Research on automatic identification method of terraces on the loess plateau based on deep transfer learning. Remote Sens. 2022, 14, 2446. [Google Scholar] [CrossRef]
- Lu, Y.; Li, X.; Xin, L.; Song, H.; Wang, X. Mapping the terraces on the Loess Plateau based on a deep learning-based model at 1.89 m resolution. Sci. Data 2023, 10, 115. [Google Scholar] [CrossRef]
- Zhang, F.; Xing, Z.; Zhao, C.; Deng, J.; Yang, B.; Tian, Q.; Rees, H.; Badreldin, N. Characterizing long-term soil and water erosion and their interactions with various conservation practices in the semi-arid Zulihe basin, Dingxi, Gansu, China. Ecol. Eng. 2017, 106, 458–470. [Google Scholar] [CrossRef]
- Chen, D.; Wei, W.; Chen, L. Effects of terracing practices on water erosion control in China: A meta-analysis. Earth-Sci. Rev. 2017, 173, 109–121. [Google Scholar] [CrossRef]
- Zhao, F.; Xiong, L.Y.; Wang, C.; Wang, H.R.; Wei, H.; Tang, G.A. Terraces mapping by using deep learning approach from remote sensing images and digital elevation models. Trans. GIS 2021, 25, 2438–2454. [Google Scholar] [CrossRef]
- Yang, D.; Huang, X. Landscape design and planning methods for plant protection based on deep learning and remote sensing techniques. Crop Prot. 2024, 180, 106620. [Google Scholar] [CrossRef]
- Li, Z.; He, W.; Cheng, M.; Hu, J.; Yang, G.; Zhang, H. SinoLC-1: The first 1  m resolution national-scale land-cover map of China created with a deep learning framework and open-access data. Earth Syst. Sci. Data 2023, 15, 4749–4780. [Google Scholar]
- Liu, Z.; Chen, G.; Tang, B.; Wen, Q.; Tan, R.; Huang, Y. Regional scale terrace mapping in fragmented mountainous areas using multi-source remote sensing data and sample purification strategy. Sci. Total Environ. 2024, 925, 171366. [Google Scholar] [CrossRef]
- Piramanayagam, S.; Saber, E.; Schwartzkopf, W.; Koehler, F.W. Supervised classification of multisensor remotely sensed images using a deep learning framework. Remote Sens. 2018, 10, 1429. [Google Scholar] [CrossRef]
- Sun, Y.; Tian, Y.; Xu, Y. Problems of encoder-decoder frameworks for high-resolution remote sensing image segmentation: Structural stereotype and insufficient learning. Neurocomputing 2019, 330, 297–304. [Google Scholar] [CrossRef]
- Ma, L.; Liu, Y.; Zhang, X.; Ye, Y.; Yin, G.; Johnson, B.A. Deep learning in remote sensing applications: A meta-analysis and review. ISPRS J. Photogramm. Remote Sens. 2019, 152, 166–177. [Google Scholar] [CrossRef]
- Ronneberger, O.; Fischer, P.; Brox, T. U-Net: Convolutional Networks for Biomedical Image Segmentation. In Proceedings of the Medical Image Computing and Computer-Assisted Intervention–MICCAI 2015: 18th International Conference, Munich, Germany, 5–9 October 2015. [Google Scholar]
- Zhou, Z.; Siddiquee, M.M.R.; Tajbakhsh, N.; Liang, J. Unet++: Redesigning skip connections to exploit multiscale features in image segmentation. IEEE Trans. Med. Imaging 2019, 39, 1856–1867. [Google Scholar] [CrossRef] [PubMed]
- Chen, J.; Lu, Y.; Yu, Q.; Luo, X.; Adeli, E.; Wang, Y.; Lu, L.; Yuille, A.L.; Zhou, Y. TransUNet: Transformers Make Strong Encoders for Medical Image Segmentation. arXiv 2021, arXiv:2102.04306. [Google Scholar]
- Li, Z.; Wang, R.; Zhang, W.; Hu, F.; Meng, L. Multiscale features supported DeepLabV3+ optimization scheme for accurate water semantic segmentation. IEEE Access 2019, 7, 155787–155804. [Google Scholar] [CrossRef]
- da Cruz, L.B.; Júnior, D.A.D.; Diniz, J.O.B.; Silva, A.C.; de Almeida, J.D.S.; de Paiva, A.C.; Gattass, M. Kidney tumor segmentation from computed tomography images using DeepLabv3+ 2.5 D model. Expert Syst Appl. 2022, 192, 116270. [Google Scholar] [CrossRef]
- Du, S.; Du, S.; Liu, B.; Zhang, X. Incorporating DeepLabv3+ and object-based image analysis for semantic segmentation of very high-resolution remote sensing images. Expert Syst. Appl. 2021, 14, 357–378. [Google Scholar] [CrossRef]
- Chen, L.-C.; Zhu, Y.; Papandreou, G.; Schroff, F.; Adam, H. Encoder-Decoder with Atrous Separable Convolution for Semantic Image Segmentation. arXiv 2018, arXiv:1802.02611. [Google Scholar]
- Zhao, H.; Shi, J.; Qi, X.; Wng, X.; Jia, J. Pyramid scene parsing network. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 2881–2890. [Google Scholar]
- Cao, B.; Yu, L.; Naipal, V.; Ciais, P.; Li, W.; Zhao, Y.; Wei, W.; Chen, D.; Liu, Z.; Gong, P. A 30-meter terrace mapping in China using Landsat 8 imagery and digital elevation model based on the Google Earth Engine. Earth Syst. Sci. Data Discuss. 2020, 2020, 1–35. [Google Scholar]
- Yang, H.; Zhou, C.; Xing, X.; Wu, Y.; Wu, Y. A High-Resolution Remote Sensing Road Extraction Method Based on the Coupling of Global Spatial Features and Fourier Domain Features. Remote Sens. 2024, 16, 3896. [Google Scholar] [CrossRef]
- Liang, Z.; Wang, F.; Zhu, J.; Li, P.; Xie, F.; Zhao, Y. Autonomous Extraction Technology for Aquaculture Ponds in Complex Geological Environments Based on Multispectral Feature Fusion of Medium-Resolution Remote Sensing Imagery. Remote Sens. 2024, 16, 4130. [Google Scholar] [CrossRef]
- Olofsson, P.; Foody, G.M.; Stehman, S.V.; Woodcock, C.E. Making better use of accuracy data in land change studies: Estimating accuracy and area and quantifying uncertainty using stratified estimation. Remote Sens. Environ. 2013, 129, 122–131. [Google Scholar] [CrossRef]
- Gómez, C.; White, J.C.; Wulder, M.A. Optical remotely sensed time series data for land cover classification: A review. ISPRS J. Photogramm. Remote Sens. 2016, 116, 55–72. [Google Scholar] [CrossRef]
- Yu, L.; Li, X.; Li, C.; Zhao, Y.; Niu, Z.; Huang, H.; Wang, J.; Cheng, Y.; Lu, H.; Si, Y.; et al. Using a global reference sample set and a cropland map for area estimation in China. Sci. China Earth Sci. 2017, 60, 277–285. [Google Scholar] [CrossRef]
- Olofsson, P.; Foody, G.M.; Herold, M.; Stehman, S.V.; Woodcock, C.E.; Wulder, M.A. Good practices for estimating area and assessing accuracy of land change. Remote Sens. Environ. 2014, 148, 42–57. [Google Scholar] [CrossRef]
- Liu, X.; Yu, J.; Song, W.; Zhao, X.; Wang, A. Remote sensing image classification algorithm based on texture feature and extreme learning machine. Comput. Mater. Contin. 2020, 65, 1385–1395. [Google Scholar] [CrossRef]
- Simon, P.; Uma, V. Deep learning based feature extraction for texture classification. Procedia Comput. Sci. 2020, 171, 1680–1687. [Google Scholar] [CrossRef]
- Shen, Q.; Deng, H.; Wen, X.; Chen, Z.; Xu, H. Statistical texture learning method for monitoring abandoned suburban cropland based on high-resolution remote sensing and deep learning. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2023, 16, 3060–3069. [Google Scholar] [CrossRef]


| Configuration | Version |
|---|---|
| CPU | 13th Gen Intel(R) Core (TM) i7-13700KF, 3.40 GHz |
| GPU | NVIDIA GeForce RTX 4070 |
| Memory | 16 GB |
| System | Microsoft Windows 11 Pro for Workstations, 64-bit |
| Language | Python 3.11.5 |
| Frame | Pytorch 2.1.1 |
| CUDA | 23.11.0 |
| Programming | PyCharm 2023.2.5 (Professional Edition) |
| Metric | Equation |
|---|---|
| OA | |
| MPA | |
| MIOU | |
| Precision | |
| Recall | |
| F1-Score |
| Method | OA | MPA | MIoU | Precision | Recall | F1-Score |
|---|---|---|---|---|---|---|
| ResU-Net | 92.76 ± 0.02 a | 93.1 ± 0.03 a | 85.41 ± 0.04 a | 91.51 ± 0.06 a | 93.8 ± 0.02 a | 90.5 ± 0.01 a |
| U-Net++ | 85.48 ± 0.03 d | 85.95 ± 0.02 d | 74.48 ± 0.03 d | 87.15 ± 0.02 c | 86.8 ± 0.04 d | 86.25 ± 0.03 d |
| RVTransUNet | 90.73 ± 0.03 b | 90.92 ± 0.03 b | 81.68 ± 0.04 b | 88.96 ± 0.03 b | 91.63 ± 0.03 b | 89.78 ± 0.02 b |
| XDeepLabV3+ | 87.41 ± 0.02 c | 87.63 ± 0.01 c | 75.88 ± 0.02 c | 86.77 ± 0.02 d | 88.31 ± 0.02 c | 87.08 ± 0.02 c |
| ResPSPNet | 82.15 ± 0.02 e | 82.26 ± 0.03 e | 68.37 ± 0.04 e | 80.31 ± 0.03 e | 82.62 ± 0.03 e | 81.57 ± 0.04 e |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kan, G.; Gong, J.; Wang, B.; Li, X.; Shi, J.; Ma, Y.; Wei, W.; Zhang, J. A Refined Terrace Extraction Method Based on a Local Optimization Model Using GF-2 Images. Remote Sens. 2025, 17, 12. https://doi.org/10.3390/rs17010012
Kan G, Gong J, Wang B, Li X, Shi J, Ma Y, Wei W, Zhang J. A Refined Terrace Extraction Method Based on a Local Optimization Model Using GF-2 Images. Remote Sensing. 2025; 17(1):12. https://doi.org/10.3390/rs17010012
Chicago/Turabian StyleKan, Guobin, Jie Gong, Bao Wang, Xia Li, Jing Shi, Yutao Ma, Wei Wei, and Jun Zhang. 2025. "A Refined Terrace Extraction Method Based on a Local Optimization Model Using GF-2 Images" Remote Sensing 17, no. 1: 12. https://doi.org/10.3390/rs17010012
APA StyleKan, G., Gong, J., Wang, B., Li, X., Shi, J., Ma, Y., Wei, W., & Zhang, J. (2025). A Refined Terrace Extraction Method Based on a Local Optimization Model Using GF-2 Images. Remote Sensing, 17(1), 12. https://doi.org/10.3390/rs17010012