Author Contributions
Conceptualizations, N.A., F.V., M.H. and A.W.; methodology, N.A., F.V., M.H. and A.W.; software, N.A. and F.V.; validation, M.H. and A.W.; formal analysis, N.A.; investigation, N.A., F.V., M.H. and A.W.; resources, F.V. and M.H.; data curation, M.H. and A.W.; writing—original draft preparation, N.A.; writing—review and editing, F.V., M.H., A.W. and F.G.; visualisation, N.A.; supervision, F.V., M.H. and F.G.; project administration, F.V. and M.H.; funding acquisition, M.H. All authors have read and agreed to the published version of the manuscript.
Figure 1.
Processing pipeline for BLP identification using UAV-based spectral data and AI.
Figure 1.
Processing pipeline for BLP identification using UAV-based spectral data and AI.
Figure 2.
Study site of coastal strip from Point Cartwright to Wurtulla.
Figure 2.
Study site of coastal strip from Point Cartwright to Wurtulla.
Figure 3.
BLP ground truth locations at Wurtulla site.
Figure 3.
BLP ground truth locations at Wurtulla site.
Figure 4.
MicaSense Altum processing workflow for multispectral orthomosaic generation (including Reflectance Calibration) in Agisoft Metashape Professional.
Figure 4.
MicaSense Altum processing workflow for multispectral orthomosaic generation (including Reflectance Calibration) in Agisoft Metashape Professional.
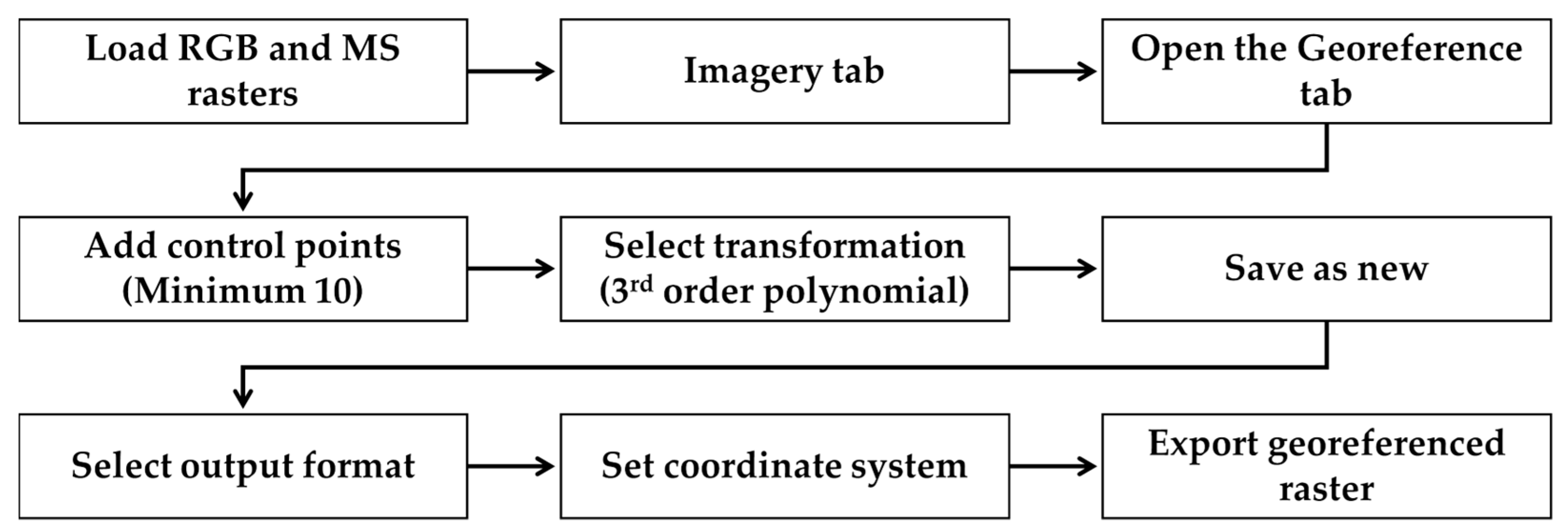
Figure 5.
Outline of processing pipeline for georeferencing of high-resolution RGB and multispectral imagery.
Figure 5.
Outline of processing pipeline for georeferencing of high-resolution RGB and multispectral imagery.
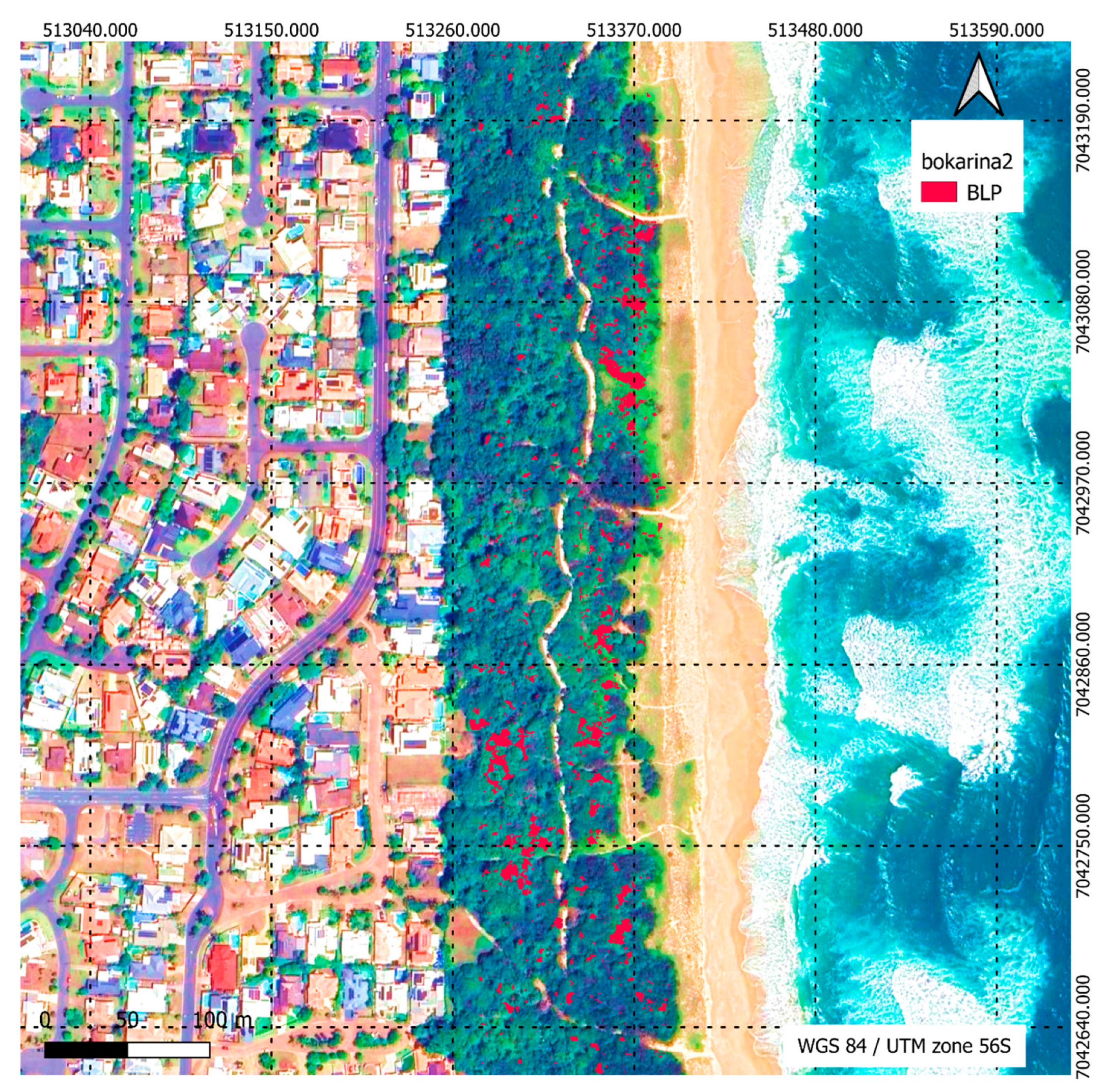
Figure 6.
Ground truth labeling of BLP at the Bokarina site, highlighting BLP population in red within a small region highlighting in yellow dotted lines.
Figure 6.
Ground truth labeling of BLP at the Bokarina site, highlighting BLP population in red within a small region highlighting in yellow dotted lines.
Figure 7.
Processing pipeline for classical machine learning model training for BLP classification.
Figure 7.
Processing pipeline for classical machine learning model training for BLP classification.
Figure 8.
Processing pipeline for DL U-Net model training for BLP classification.
Figure 8.
Processing pipeline for DL U-Net model training for BLP classification.
Figure 9.
U-Net architecture used for BLP classification.
Figure 9.
U-Net architecture used for BLP classification.
Figure 10.
Spectral signature differences for various VIs.
Figure 10.
Spectral signature differences for various VIs.
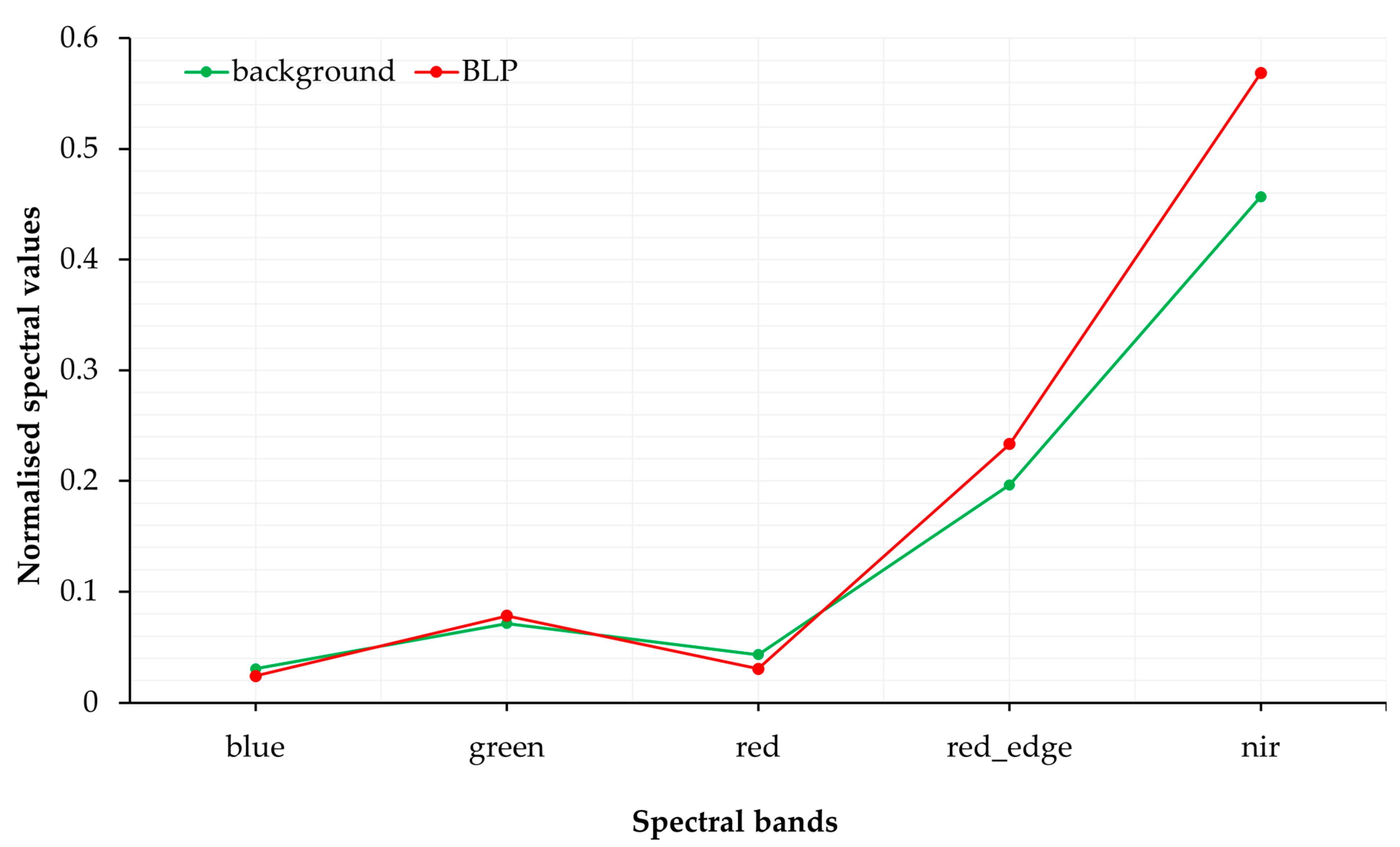
Figure 11.
Spectral signature difference for spectral bands.
Figure 11.
Spectral signature difference for spectral bands.
Figure 12.
Variable importance factor (VIF) values for different VIs.
Figure 12.
Variable importance factor (VIF) values for different VIs.
Figure 13.
Correlation heatmap for different VIs used in this study.
Figure 13.
Correlation heatmap for different VIs used in this study.
Figure 14.
BLP prediction outcomes generated by RF model at region of interest in Bokarina study site: yellow polygons represent ground truth labels, regions highlighted in red denote prediction outcomes (a) training phase, (b) testing phase.
Figure 14.
BLP prediction outcomes generated by RF model at region of interest in Bokarina study site: yellow polygons represent ground truth labels, regions highlighted in red denote prediction outcomes (a) training phase, (b) testing phase.
Figure 15.
Visual representation of the RGB regions of interest with respective labelled mask, multispectral, and selected VIs.
Figure 15.
Visual representation of the RGB regions of interest with respective labelled mask, multispectral, and selected VIs.
Figure 16.
Comparison of U-Net model performance (precision (P) and recall (R) for BLP) using different feature sets in testing dataset.
Figure 16.
Comparison of U-Net model performance (precision (P) and recall (R) for BLP) using different feature sets in testing dataset.
Figure 17.
U-Net BLP model training plot: (a) accuracy, (b) precision (BLP).
Figure 17.
U-Net BLP model training plot: (a) accuracy, (b) precision (BLP).
Figure 18.
K-fold cross-validation for BLP U-Net model: (a) accuracy, (b) loss metrics.
Figure 18.
K-fold cross-validation for BLP U-Net model: (a) accuracy, (b) loss metrics.
Figure 19.
BLP prediction outcomes generated by U-Net model showcasing selected ROIs from testing phase. Representation includes RGB images, MS views, corresponding labelled masks, and U-Net model predictions.
Figure 19.
BLP prediction outcomes generated by U-Net model showcasing selected ROIs from testing phase. Representation includes RGB images, MS views, corresponding labelled masks, and U-Net model predictions.
Figure 20.
U-Net predictions, encompassing high-resolution RGB image of entire study area of Bokarina2 site overlaid on Google Earth satellite image. (a) U-Net predictions depicted with BLP highlighted in red, (b) offers zoomed-in view of prediction, providing closer examination of model’s output at a more detailed level.
Figure 20.
U-Net predictions, encompassing high-resolution RGB image of entire study area of Bokarina2 site overlaid on Google Earth satellite image. (a) U-Net predictions depicted with BLP highlighted in red, (b) offers zoomed-in view of prediction, providing closer examination of model’s output at a more detailed level.
Figure 21.
Integration of Google Earth satellite image depicting site within Bokarina2 overlaid with BLP predictions highlighted in red, illustrating model’s spatial accuracy in identifying target species.
Figure 21.
Integration of Google Earth satellite image depicting site within Bokarina2 overlaid with BLP predictions highlighted in red, illustrating model’s spatial accuracy in identifying target species.
Table 1.
Comprehensive sensor specifications for MicaSense Altum-PT.
Table 1.
Comprehensive sensor specifications for MicaSense Altum-PT.
| Specification | MicaSense Altum-PT |
|---|
| Weight | 577 g |
| Spectral Bands | Blue (475 nm center, 32 nm bandwidth), Green (560 nm center, 27 nm bandwidth), Red (668 nm center, 14 nm bandwidth), Red-edge (717 nm center, 12 nm bandwidth), and Near-IR (842 nm center, 57 nm bandwidth) |
| Sensor Resolution | 2064 × 1544 (3.2 MP per MS band)
4112 × 3008 (12 MP panchromatic band)
320 × 256 thermal infrared |
| Field of View | 50° HFOV × 38° VFOV (MS) 46° HFOV × 35° VFOV (panchromatic) 48° × 40° (thermal) |
Table 2.
Summary of flight parameters for UAV data collection.
Table 2.
Summary of flight parameters for UAV data collection.
| Image | UAV | Sensor | AGL | GSD | Speed | Front Overlap | Side Overlap |
|---|
| RGB | DJI Matrice 300 | DJI Zenmuse–P1 | 45 m | 0.57 cm/pixel | 6.1 ms−1 | 80% | 70% |
| MS | DJI Matrice 300 | MicaSense Altum–PT | 45 m–50 m | 2.59–2.88 cm/pixel | 5.9 ms−1 | 80% | 80% |
Table 3.
Dates of data capture for RGB and multispectral imagery in five foreshore bushland reserves.
Table 3.
Dates of data capture for RGB and multispectral imagery in five foreshore bushland reserves.
| Mapping Area | Date of UAV Data Collation |
|---|
| RGB | Multispectral |
|---|
| Pt Cartwright | 24 October 2022, 7 November 2022, 9 November 2022 | 14 November 2022, 22 November 2022 |
| Buddina | 26 October 2022, 7 November 2022 | 15 November 2022 |
| Warana | 9 November 2022 | 17 November 2022 |
| Bokarina | 28 November 2022 | 18 November 2022, 21 November 2022 |
| Wurtulla | 28 November 2022 | 21 November 2022, 22 November 2022 |
Table 4.
BLP ground truthing dates time allocation.
Table 4.
BLP ground truthing dates time allocation.
| Mapping Area | Time Taken | Date of Ground Truth Data Collection |
|---|
| Pt Cartwright | 2:00 | 23 March 2023 |
| Buddina (BA 201–202, BA 211–212) | 2:00 | 23 March 2023 |
| Warana 237–238 | 7:00 | 16 March 2023 |
| Warana 233–234 | 6:30 | 27 March 2023 |
| Bokarina 242–243 | 11:00 | 16 March 2023, 3 April 2023 |
| Bokarina 245–246 | 3:00 | 3 April 2023 |
| Wurtulla 248–249 | 11:00 | 31 March 2023 |
| Wurtulla 251–252 | 5:00 | 31 March 2023 |
| Total | 47.5 h | |
Table 5.
VIs derived from spectral bands including blue (B), green (G), red (R), near-infrared (NIR), and red-edge used for BLP model training and improvement.
Table 5.
VIs derived from spectral bands including blue (B), green (G), red (R), near-infrared (NIR), and red-edge used for BLP model training and improvement.
| Vegetation Indices | Formula | References |
|---|
| Normalised Difference Vegetation Index (NDVI) | | [55] |
| Green Normalised Difference Vegetation Index (GNDVI) | | [56] |
| Normalised Difference Red Edge Index (NDRE) | NDRE = | [57] |
| Leaf Chlorophyll Index (LCI) | LCI = | [58] |
| Difference Vegetation Index (DVI) | DVI = NIR − R | [59] |
| Enhanced Vegetation Index (EVI) | EVI = | [58] |
| Triangular Vegetation Index (TVI) | TVI = 60(NIR − G) − 100(R − G) | [58] |
| Green Chlorophyll Index (GCI) | | [60] |
| Green Difference Vegetation Index (GDVI) | | [61] |
| Normalised Green Red Difference Index (NGRDI) | | [62] |
| Modified Soil-Adjusted Vegetation Index (MSAVI) | MASVI = | [63] |
| Atmospherically Resistant Vegetation Index (ARVI) | | [63] |
| Structure Insensitive Pigment Index (SIPI) | | [64] |
| Optimised Soil-Adjusted Vegetation Index (OSAVI) | OSAVI = | [65] |
| Green Optimised Soil Adjusted Vegetation Index (GOSAVI) | GOSAVI = | [65] |
| Excess Green (ExG) | | [66] |
| Excess Red (ExR) | | [66] |
| Excess Green Red (ExGR) | | [66] |
| Green, Red Vegetation Index (GRVI) | | [66] |
| Normalised Difference Index (NDI) | | [66] |
| Red Green Index (RGI) | | [66] |
| Enhanced Normalised Difference Vegetation Index (ENDVI) | | [64] |
| Simple Ratio Index (SRI) | | [67] |
| Green Chromatic Coordinate (GCC) | | [68] |
| Red edge chlorophyll Index (RECI) | | [69] |
| Normalised Difference Water Index (NDWI) | | [69] |
Table 6.
Parameter tunning for U-Net model improvement.
Table 6.
Parameter tunning for U-Net model improvement.
| Processing Stages | Key Parameters | Configurations |
|---|
| Pre processing | Bands | Without bands, 5 bands, Top 2 bands |
| Vegetation indices (VIs) | Without VIs, Top 5 VIs, Top 3 VIs |
| Patch size | 32, 64, 128, 256, 512 |
| Low pass filter | Without filter, 3 × 3, 5 × 5 |
| Gaussian blur filter | Without filter, 3 × 3, 5 × 5 |
| Train test split | 20%, 25%, 30%, 40% |
| Model Architecture | Convolution layers | 32–024, 64–1024, 128–1024, 16–512, 32–512, 16–256, 32–256 |
| Dropout | 0.1, 0.2 |
| Model compile and Training | Learning rate | 0.1, 0.01, 0.001, 0.0001 |
| Batch size | 10, 15, 20, 25, 30, 35, 40, 45 |
| Epochs | 50, 75, 100, 150, 200, 250, 300, 400, 500, 600 |
Table 7.
Summary of selected VIs using different feature extraction techniques.
Table 7.
Summary of selected VIs using different feature extraction techniques.
| Spectral Signature | VIF | Correlation Matrix | PCA |
|---|
| MSAVI | SRI | GCI | GOSAVI |
| EVI | RECI | SRI | NGRDI |
| OSAVI | EVI | RGI | GRVI |
| TVI | GCI | OSAVI | EVI |
| DVI | RGI | RECI | RECI |
Table 8.
Comparison of performance metrics (precision, recall, F1–score, Overall Accuracy) for Background and BLP classes across different classification models (XGBoost, RF, SVM) in training, validation, and testing phases.
Table 8.
Comparison of performance metrics (precision, recall, F1–score, Overall Accuracy) for Background and BLP classes across different classification models (XGBoost, RF, SVM) in training, validation, and testing phases.
| Class | XGBoost | RF | SVM |
|---|
| Training and Validation | Training and Validation | Training and Validation |
|---|
| P | R | F1 | OA | P | R | F1 | OA | P | R | F1 | OA |
|---|
| Background | 94% | 95% | 94% | 91% | 95% | 92% | 93% | 93% | 86% | 62% | 72% | 76% |
| BLP | 74% | 68% | 71% | 92% | 95% | 94% | 70% | 90% | 79% |
| Class | Testing | Testing | Testing |
| P | R | F1 | OA | P | R | F1 | OA | P | R | F1 | OA |
| Background | 86% | 90% | 88% | 80% | 91% | 81% | 85% | 77% | 96% | 55% | 70% | 62% |
| BLP | 45% | 35% | 39% | 43% | 64% | 51% | 32% | 90% | 47% |
Table 9.
U-Net model in training, validation, and testing performance metrics (precision (P), recall (R), F1–score (F1), and Intersection over Union (IoU)) for background and BLP classes using two feature sets (5 bands and all 27 vegetation indices) without feature extraction technique.
Table 9.
U-Net model in training, validation, and testing performance metrics (precision (P), recall (R), F1–score (F1), and Intersection over Union (IoU)) for background and BLP classes using two feature sets (5 bands and all 27 vegetation indices) without feature extraction technique.
| Feature Sets | Matrix | Training and Validation | Testing |
|---|
| Background | BLP | Background | BLP |
|---|
| 5 bands (Blue, Green, Red, NIR, and Red-edge) only | P | 94% | 89% | 92% | 77% |
| R | 96% | 85% | 96% | 60% |
| F1 | 95% | 87% | 94% | 68% |
| IoU | 90% | 76% | 88% | 51% |
| All VIs (27) | P | 95% | 61% | 92% | 67% |
| R | 93% | 68% | 97% | 42% |
| F1 | 94% | 64% | 94% | 52% |
| IoU | 89% | 47% | 89% | 35% |
Table 10.
U-Net model in training, validation, and testing performance metrics (precision (P), recall (R), F1–score (F1), and Intersection over Union (IoU)) for background and BLP classes using four feature extraction techniques.
Table 10.
U-Net model in training, validation, and testing performance metrics (precision (P), recall (R), F1–score (F1), and Intersection over Union (IoU)) for background and BLP classes using four feature extraction techniques.
| Feature Sets | Matrix | Training and Validation | Testing |
|---|
| Background | BLP | Background | BLP |
|---|
| 5 VIs from spectral signature plot (MSAVI, EVI, OSAVI, TVI, DVI) only | P | 96% | 82% | 88% | 83% |
| R | 93% | 87% | 92% | 75% |
| F1 | 94% | 85% | 90% | 79% |
| IoU | 90% | 81% | 81% | 65% |
| 5 VIs from VIF (SRI, RECI, EVI, GCI, RGI) | P | 69% | 49% | 70% | 84% |
| R | 83% | 31% | 97% | 24% |
| F1 | 75% | 38% | 82% | 38% |
| IoU | 60% | 23% | 69% | 23% |
| 5 VIs from correlation (GCI, SRI, RGI, OSAVI, RECI) | P | 90% | 68% | 83% | 83% |
| R | 78% | 84% | 93% | 64% |
| F1 | 83% | 75% | 87% | 72% |
| IoU | 72% | 66% | 78% | 56% |
| 5 VIs from PCA (GOSAVI, NGRDI, GRVI, EVI, RECI) | P | 81% | 83% | 70% | 71% |
| R | 93% | 59% | 94% | 25% |
| F1 | 87% | 69% | 80% | 37% |
| IoU | 76% | 52% | 67% | 23% |
Table 11.
U-Net model in training, validation, and testing performance metrics (precision (P), recall (R), F1–score (F1), and Intersection over Union (IoU)) for background and BLP classes using spectral signature technique.
Table 11.
U-Net model in training, validation, and testing performance metrics (precision (P), recall (R), F1–score (F1), and Intersection over Union (IoU)) for background and BLP classes using spectral signature technique.
| Feature Sets | Matrix | Training and Validation | Testing |
|---|
| Background | BLP | Background | BLP |
|---|
| 2 bands (NIR, and Red-edge) and 3 VIs (MSAVI, EVI, OSAVI) | P | 94% | 53% | 92% | 59% |
| R | 92% | 61% | 94% | 50% |
| F1 | 93% | 57% | 93% | 54% |
| IoU | 87% | 39% | 87% | 37% |
| 2 bands (NIR, and Red-edge) and 5 VIs from spectral signature plot ((MSAVI, EVI, OSAVI, TVI, DVI)) | P | 94% | 83% | 88% | 86% |
| R | 95% | 81% | 93% | 76% |
| F1 | 94% | 82% | 90% | 81% |
| IoU | 89% | 89% | 82% | 68% |


 ,
, 



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}