
Research on Three-Dimensional Cloud Structure Retrieval and Fusion Technology for the MODIS Instrument



Abstract
1. Introduction
2. Data and Methodology
2.1. CloudSat and MODIS Datasets
2.2. Requirements for Retrieving 3D Cloud Fields for the MODIS Granules
2.3. Case Selection
2.4. Verification Metrics
3. Bidirectional Ensemble Binning Probability Fusion (BEBPF)
3.1. Errors Distribution of the CGAN Scene Retrievals
3.2. Ensembles of the CGAN-Retrieved Scenes
3.3. Ensemble Binning Probability Fusion (EBPF)
- (1)
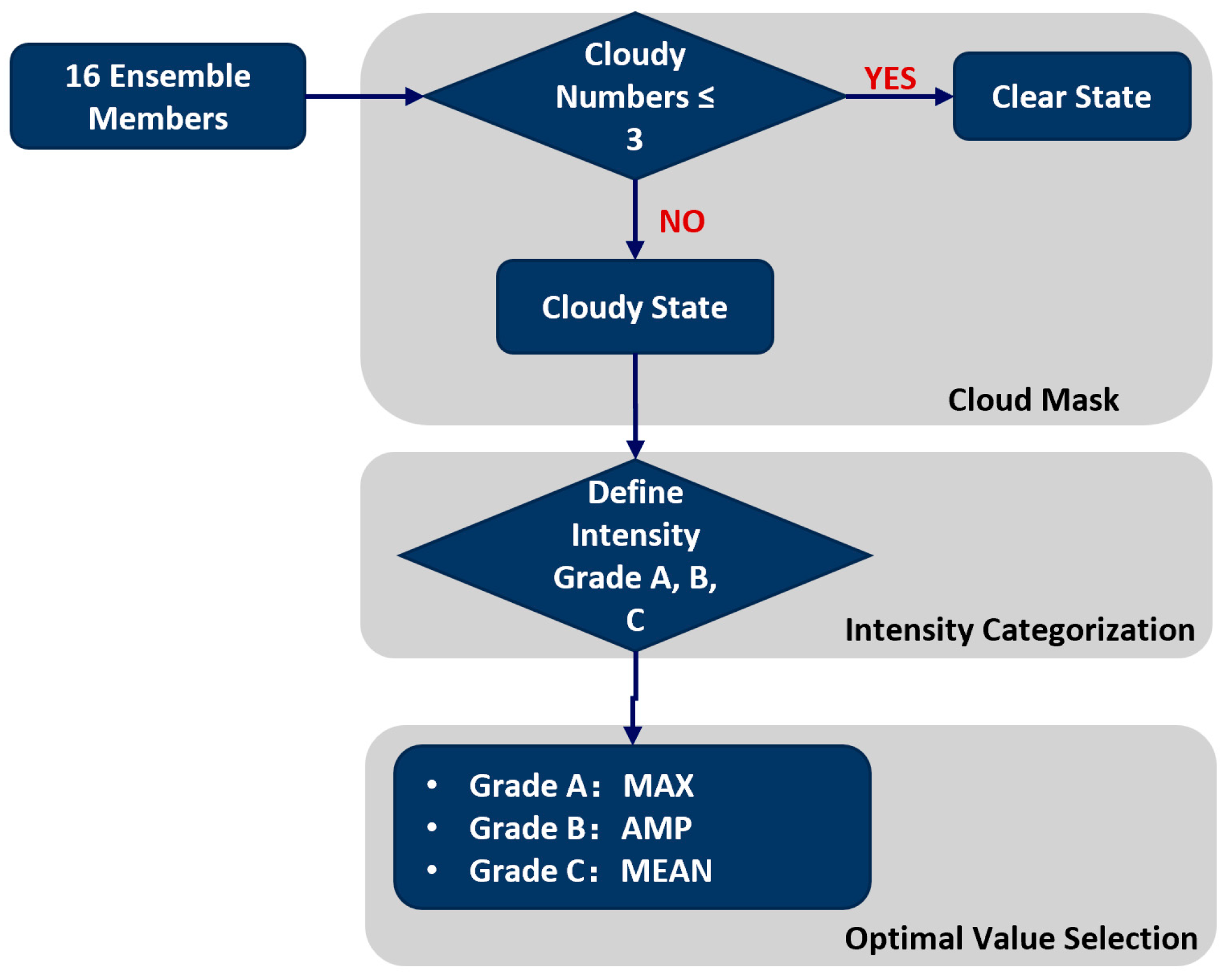
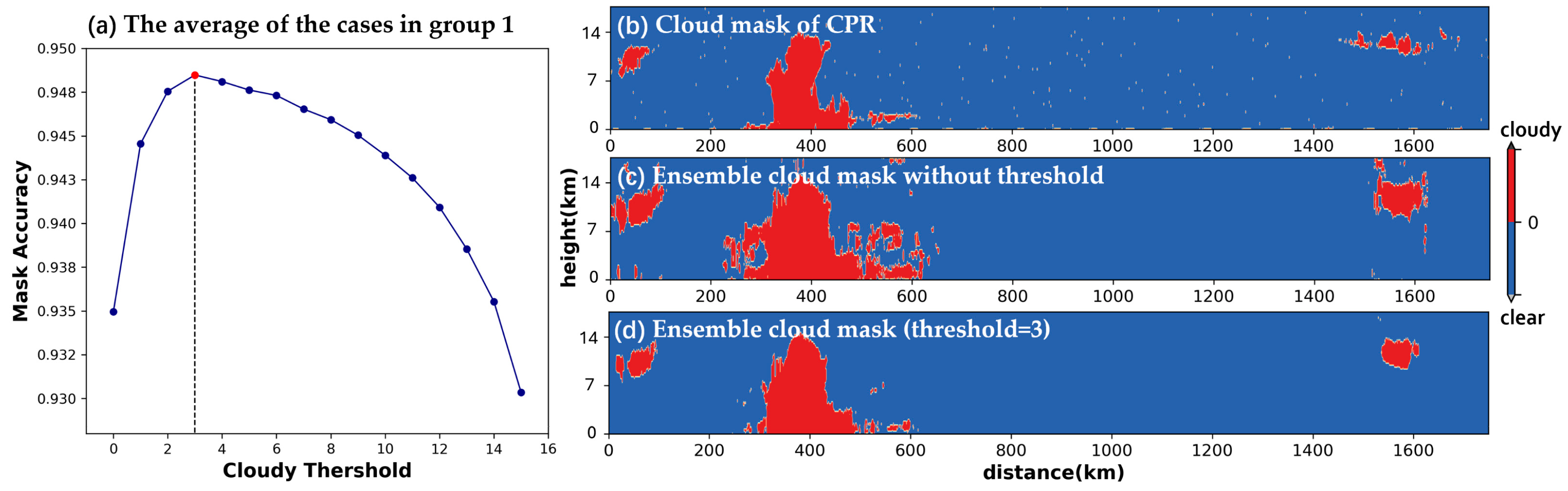
- Cloud Masking
- (2)
- Intensity Scaling and Processing
3.4. Evaluation of EBPF
3.5. Bidirectional EBPF 3D Cloud Retrieving (BEBPF)
4. Case Studies
4.1. Typhoon Chaba
4.2. A Multi-Cell Convective System
5. Conclusions
- (1)
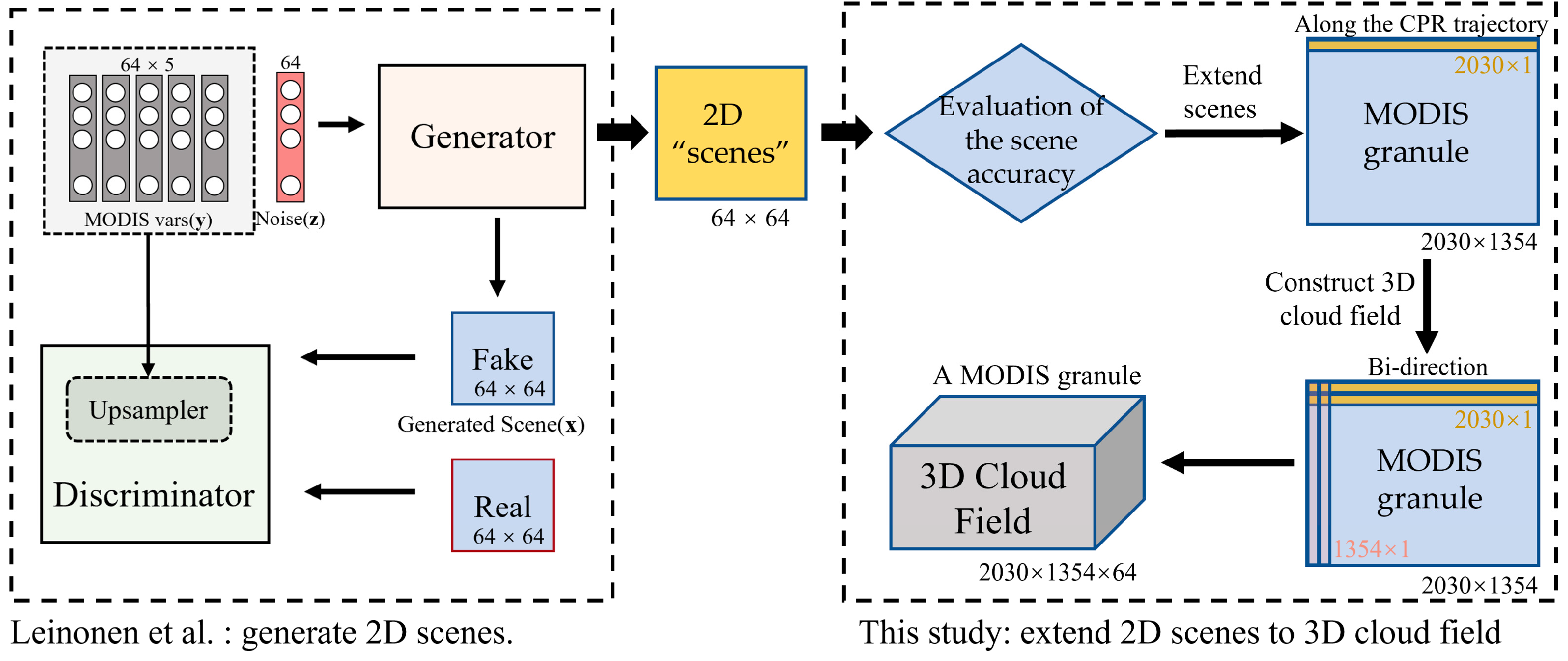
- Statistical verification of the 7180 2D cloud scenes (vertical cross sections of cloud radar reflectivity) generated by the CGAN model of Leinonen et al. [20] exhibited discontinuity in neighboring scenes, internal uncertainties, and an increase in error towards lateral boundaries. Running the model for the overlapping scenes, but with a small shift in the grids, changed the retrieval results significantly.
- (2)
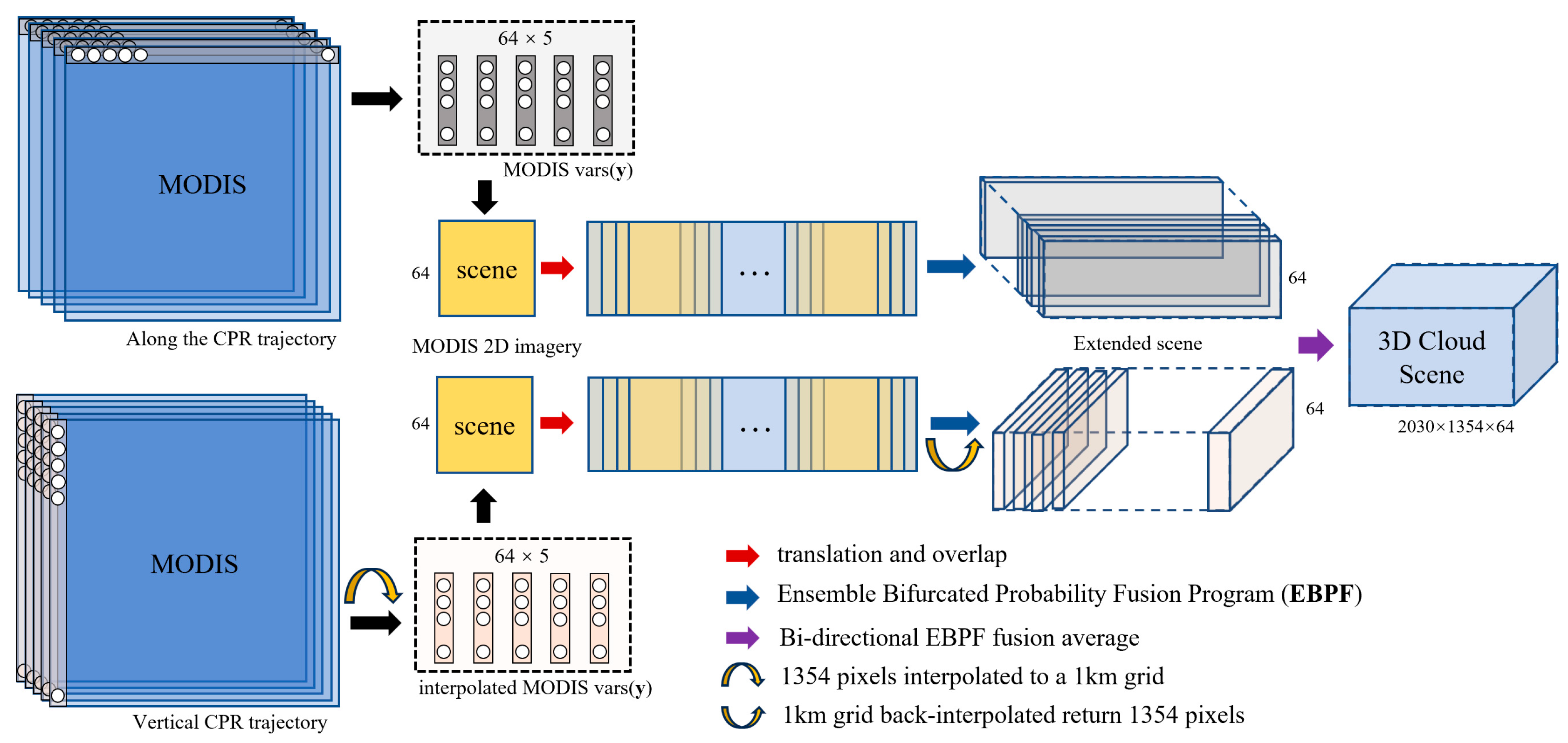
- A bidirectional ensemble binning probability fusion (BEBPF) technique was introduced to overcome the issues of Leinonen et al. CGAN model and generate seamless 3D cloud fields for the MODIS granules, termed CGAN-BEBPF. CGAN-BEBPF optimized the Leinonen et al. [20] CGAN model retrieval (scenes) accuracy and realized seamless fusion of the scene by generating overlapped scenes and pixel-wise ensembles and making use of the ensemble probability information. CGAN-BEBPF had three components: cloud masking, intensity scaling, and optimal value selection. CGAN-BEBPF provided superior coverage of the low reflectivity areas and preserved high reflectivity in the cloud cores, significantly outperforming the direct splicing or simple ensemble mean methods.
- (3)
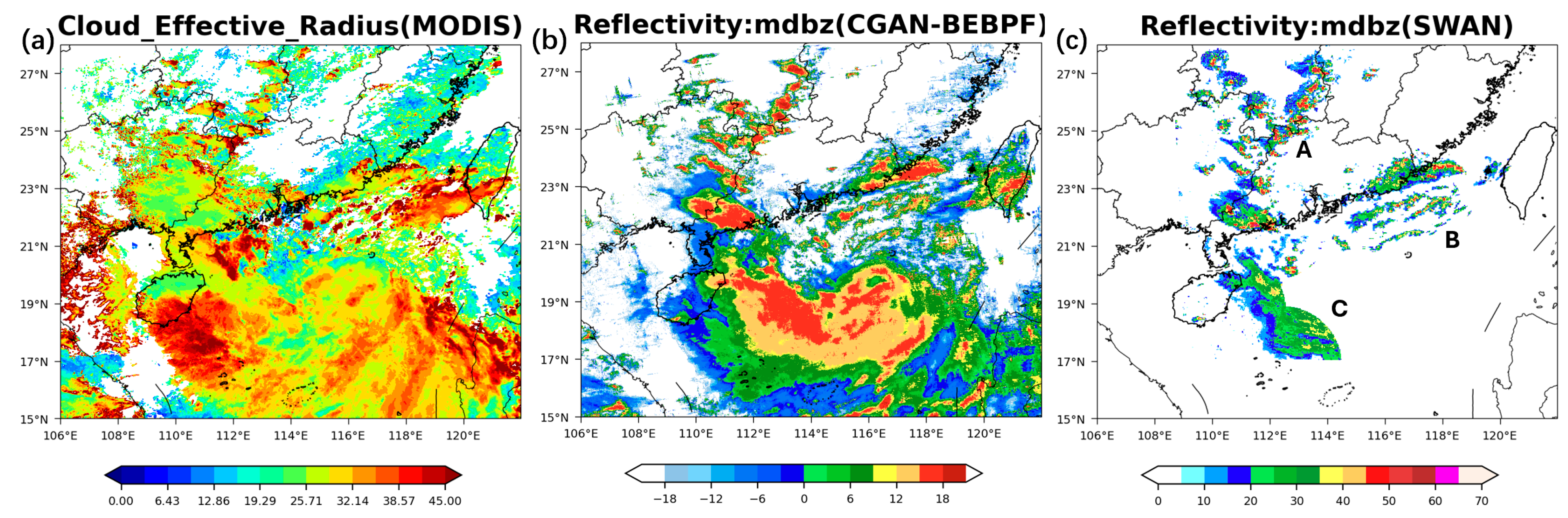
- CGAN-BEBPF was applied to retrieve the 3D cloud structure of typhoon Chaba and a multi-cell convective system. A comparison of the retrieved CGAN-BEBPF 3D cloud fields with the ground-based radar observations showed that CGAN-BEBPF was remarkably capable of retrieving the structure and locations of rainbands and convective cells of typhoon and severe convection, as well as the weak ice and snow clouds in the upper layer of deep convective systems, which were mostly missed by ground-based radars. Furthermore, CGAN-BEBPF retrieved weak clouds around rainbands, producing broader 3D rainbands than those observed by ground-based radars.
- (4)
- Due to the signal attenuation effect of the CloudSat CPR (W-band), CGAN-BEBPF underestimated the radar reflectivity in the lowest 2–3 km precipitation layer of deep convective cores and had difficulty in resolving the sharp small-scale core structures.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Li, Z.; Barker, H.W.; Moreau, L. The variable effect of clouds on atmospheric absorption of solar radiation. Nature 1995, 376, 486–490. [Google Scholar] [CrossRef]
- Stephens, G.L. Cloud feedbacks in the climate system: A critical review. J. Clim. 2005, 18, 237–273. [Google Scholar] [CrossRef]
- Randall, D.; Khairoutdinov, M.; Arakawa, A.; Grabowski, W. Breaking the cloud parameterization deadlock. Bull. Am. Meteorol. Soc. 2003, 84, 1547–1564. [Google Scholar] [CrossRef]
- Stephens, G.L.; Vane, D.G.; Boain, R.J.; Mace, G.G.; Sassen, K.; Wang, Z.; Illingworth, A.J.; O’connor, E.J.; Rossow, W.B.; Durden, S.L.; et al. The CloudSat mission and the A-Train: A new dimension of space-based observations of clouds and precipitation. Bull. Am. Meteorol. Soc. 2002, 83, 1771–1790. [Google Scholar] [CrossRef]
- Iguchi, T.; Seto, S.; Meneghini, R.; Yoshida, N.; Awaka, J.; Le, M.; Chandrasekar, V.; Kubota, T. GPM/DPR Level-2 Algorithm Theoretical Basis Document; NASA Goddard Space Flight Center: Greenbelt, MD, USA, 2010. [Google Scholar]
- Liao, L.; Meneghini, R. GPM DPR retrievals: Algorithm, evaluation, and validation. Remote Sens. 2022, 14, 843. [Google Scholar] [CrossRef]
- Bali, M. GSICS Quarterly Vol. 17 No. 3. 2023. Available online: https://repository.library.noaa.gov/view/noaa/56327 (accessed on 24 April 2024).
- Parkinson, C.L. Aqua: An Earth-observing satellite mission to examine water and other climate variables. IEEE Trans. Geosci. Remote Sens. 2003, 41, 173–183. [Google Scholar] [CrossRef]
- Platnick, S.; King, M.D.; Ackerman, S.A.; Menzel, W.P.; Baum, B.A.; Riédi, J.C.; Frey, R.A. The MODIS cloud products: Algorithms and examples from Terra. IEEE Trans. Geosci. Remote Sens. 2003, 41, 459–473. [Google Scholar] [CrossRef]
- Barker, H.W.; Jerg, M.P.; Wehr, T.; Kato, S.; Donovan, D.P.; Hogan, R.J. A 3D cloud-construction algorithm for the EarthCARE satellite mission. Q. J. R. Meteorol. Soc. 2011, 137, 1042–1058. [Google Scholar] [CrossRef]
- Miller, S.D.; Forsythe, J.M.; Partain, P.T.; Haynes, J.M.; Bankert, R.L.; Sengupta, M.; Mitrescu, C.; Hawkins, J.D.; Haar, T.H.V. Estimating three-dimensional cloud structure via statistically blended satellite observations. J. Appl. Meteorol. Climatol. 2014, 53, 437–455. [Google Scholar] [CrossRef]
- Noh, Y.J.; Haynes, J.M.; Miller, S.D.; Seaman, C.J.; Heidinger, A.K.; Weinrich, J.; Kulie, M.S.; Niznik, M.; Daub, B.J. A Framework for Satellite-Based 3D Cloud Data: An Overview of the VIIRS Cloud Base Height Retrieval and User Engagement for Aviation Applications. Remote Sens. 2022, 14, 5524. [Google Scholar] [CrossRef]
- Dubovik, O.; Schuster, G.L.; Xu, F.; Hu, Y.; Bösch, H.; Landgraf, J.; Li, Z. Grand challenges in satellite remote sensing. Front. Remote Sens. 2021, 2, 619818. [Google Scholar] [CrossRef]
- Jeppesen, J.H.; Jacobsen, R.H.; Inceoglu, F.; Toftegaard, T.S. A cloud detection algorithm for satellite imagery based on deep learning. Remote Sens. Environ. 2019, 229, 247–259. [Google Scholar] [CrossRef]
- Lee, Y.; Kummerow, C.D.; Ebert-Uphoff, I. Applying machine learning methods to detect convection using Geostationary Operational Environmental Satellite-16 (GOES-16) advanced baseline imager (ABI) data. Atmos. Meas. Tech. 2021, 14, 2699–2716. [Google Scholar] [CrossRef]
- Pritt, M.; Chern, G. Satellite image classification with deep learning. In Proceedings of the 2017 IEEE Applied Imagery Pattern Recognition Workshop (AIPR), Washington, DC, USA, 10–12 October 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–7. [Google Scholar]
- Chen, S.; Wang, H.; Xu, F.; Jin, Y.-Q. Target classification using the deep convolutional networks for SAR images. IEEE Trans. Geosci. Remote Sens. 2016, 54, 4806–4817. [Google Scholar] [CrossRef]
- Goodfellow, I.; Pouget-Abadie, J.; Mirza, M.; Xu, B.; Warde-Farley, D.; Ozair, S.; Courville, A.; Bengio, Y. Generative adversarial nets. arXiv 2014, arXiv:1406.2661. [Google Scholar]
- Mirza, M.; Osindero, S. Conditional generative adversarial nets. arXiv 2014, arXiv:1411.1784. [Google Scholar]
- Leinonen, J.; Guillaume, A.; Yuan, T. Reconstruction of cloud vertical structure with a generative adversarial network. Geophys. Res. Lett. 2019, 46, 7035–7044. [Google Scholar] [CrossRef]
- Wang, F.; Liu, Y.; Zhou, Y.; Sun, R.; Duan, J.; Li, Y.; Ding, Q.; Wang, H. Retrieving Vertical Cloud Radar Reflectivity from MODIS Cloud Products with CGAN: An Evaluation for Different Cloud Types and Latitudes. Remote Sens. 2023, 15, 816. [Google Scholar] [CrossRef]
- Remer, L.A.; Tanré, D.; Kaufman, Y.J.; Levy, R.; Mattoo, S. Algorithm for remote sensing of tropospheric aerosol from MODIS: Collection 005. Natl. Aeronaut. Space Adm. 2006, 1490. Available online: https://modis-images.gsfc.nasa.gov/_docs/MOD04:MYD04_ATBD_C005_rev1.pdf (accessed on 18 March 2024).
- Marchand, R.; Mace, G.G.; Ackerman, T.; Stephens, G. Hydrometeor detection using CloudSat—An Earth-orbiting 94-GHz cloud radar. J. Atmos. Ocean. Technol. 2008, 25, 519–533. [Google Scholar] [CrossRef]
- Stephens, G.L.; Vane, D.G.; Tanelli, S.; Im, E.; Durden, S.; Rokey, M.; Reinke, D.; Partain, P.; Mace, G.G.; Austin, R.; et al. CloudSat mission: Performance and early science after the first year of operation. J. Geophys. Res. Atmos. 2008, 113. [Google Scholar] [CrossRef]
- Barnes, W.L.; Xiong, X.; Salomonson, V.V. Status of terra MODIS and aqua MODIS. Adv. Space Res. 2003, 32, 2099–2106. [Google Scholar] [CrossRef]
- Kotarba, A.Z. Calibration of global MODIS cloud amount using CALIOP cloud profiles. Atmos. Meas. Tech. 2020, 13, 4995–5012. [Google Scholar] [CrossRef]
- Kang, L.; Marchand, R.; Smith, W. Evaluation of MODIS and Himawari-8 low clouds retrievals over the Southern Ocean with in situ measurements from the SOCRATES campaign. Earth Space Sci. 2021, 8, e2020EA001397. [Google Scholar] [CrossRef]
- Cronk, H.; Partain, P. Cloudsat mod06-aux auxiliary data process description and interface control document. Natl. Aeronaut. Space Adm. Earth Syst. Sci. Pathfind. Mission. 2018. Available online: https://www.cloudsat.cira.colostate.edu/cloudsat-static/info/dl/mod06-5km-aux/MOD06-AUX_PDICD.P1_R05.rev0_.pdf (accessed on 18 March 2024).
- Barnes, W.L.; Pagano, T.S.; Salomonson, V.V. Prelaunch characteristics of the moderate resolution imaging spectroradiometer (MODIS) on EOS-AM1. IEEE Trans. Geosci. Remote Sens. 1998, 36, 1088–1100. [Google Scholar] [CrossRef]
- Heidke, P. Calculation of the success and goodness of strong wind forecasts in the storm warning service. Geogr. Ann. Stockh. 1926, 8, 301–349. [Google Scholar]
- Doswell, C.A., III; Davies-Jones, R.; Keller, D.L. On Summary Measures of Skill in Rare Event Forecasting Based on Contingency Tables. Weather Forecast. 1990, 5, 576–585. [Google Scholar] [CrossRef]
- Gilbert, G.K. Finley’s Tornado predictions. Am. Meteorol. J. 1884, 1, 166. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Group 1 | Group 2 | |
|---|---|---|
| 23:10, 31 December 2014 Western Pacific (44°17′48″N, 150°18′1″W) | 14:10, 31 March 2014 Atlantic Ocean (10°29′28″S, 5°34′52″W) | 02:50, 2 July 2022 Typhoon Chaba (19°42′56″N, 114°21′21″E) |
| 23:45, 31 March 2015 Western Pacific (35°26′5″N, 156°40′55″W) | 16:40, 20 October 2016 Atlantic Ocean (43°56′46″S, 37°00′43″W) | 06:00, 24 August 2022 A complex convective system (18°44′28″N, 111°34′23″E) |
| 04:00, 30 July 2016 Eastern Pacific (23°00′47″N, 141°33′43″E) | 15:45, 4 December 2017 Atlantic Ocean (21°03′40″S, 27°52′6″W) | |
| Predictions (Positive) | Predictions (Negative) | |
|---|---|---|
| Observation (positive) | True positive (TP) | False negative (FN) |
| Observation (negative) | False positive (FP) | True negative (TN) |
| −22 dBZ | −15 dBZ | −10 dBZ | −5 dBZ | 0 dBZ | 5 dBZ | 10 dBZ | |
|---|---|---|---|---|---|---|---|
| Direct splicing | 0.69 | 0.71 | 0.72 | 0.69 | 0.64 | 0.55 | 0.40 |
| Ensemble mean | 0.67 | 0.73 | 0.73 | 0.70 | 0.66 | 0.57 | 0.31 |
| Ensemble maximum | 0.67 | 0.73 | 0.73 | 0.71 | 0.66 | 0.57 | 0.48 |
| EBPF | 0.71 | 0.74 | 0.75 | 0.71 | 0.66 | 0.59 | 0.53 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qin, Y.; Wang, F.; Liu, Y.; Fan, H.; Zhou, Y.; Duan, J. Research on Three-Dimensional Cloud Structure Retrieval and Fusion Technology for the MODIS Instrument. Remote Sens. 2024, 16, 1561. https://doi.org/10.3390/rs16091561
Qin Y, Wang F, Liu Y, Fan H, Zhou Y, Duan J. Research on Three-Dimensional Cloud Structure Retrieval and Fusion Technology for the MODIS Instrument. Remote Sensing. 2024; 16(9):1561. https://doi.org/10.3390/rs16091561
Chicago/Turabian StyleQin, Yu, Fengxian Wang, Yubao Liu, Hang Fan, Yongbo Zhou, and Jing Duan. 2024. "Research on Three-Dimensional Cloud Structure Retrieval and Fusion Technology for the MODIS Instrument" Remote Sensing 16, no. 9: 1561. https://doi.org/10.3390/rs16091561
APA StyleQin, Y., Wang, F., Liu, Y., Fan, H., Zhou, Y., & Duan, J. (2024). Research on Three-Dimensional Cloud Structure Retrieval and Fusion Technology for the MODIS Instrument. Remote Sensing, 16(9), 1561. https://doi.org/10.3390/rs16091561