


A Hierarchical Heuristic Architecture for Unmanned Aerial Vehicle Coverage Search with Optical Camera in Curve-Shape Area


Abstract
1. Introduction
- (1)
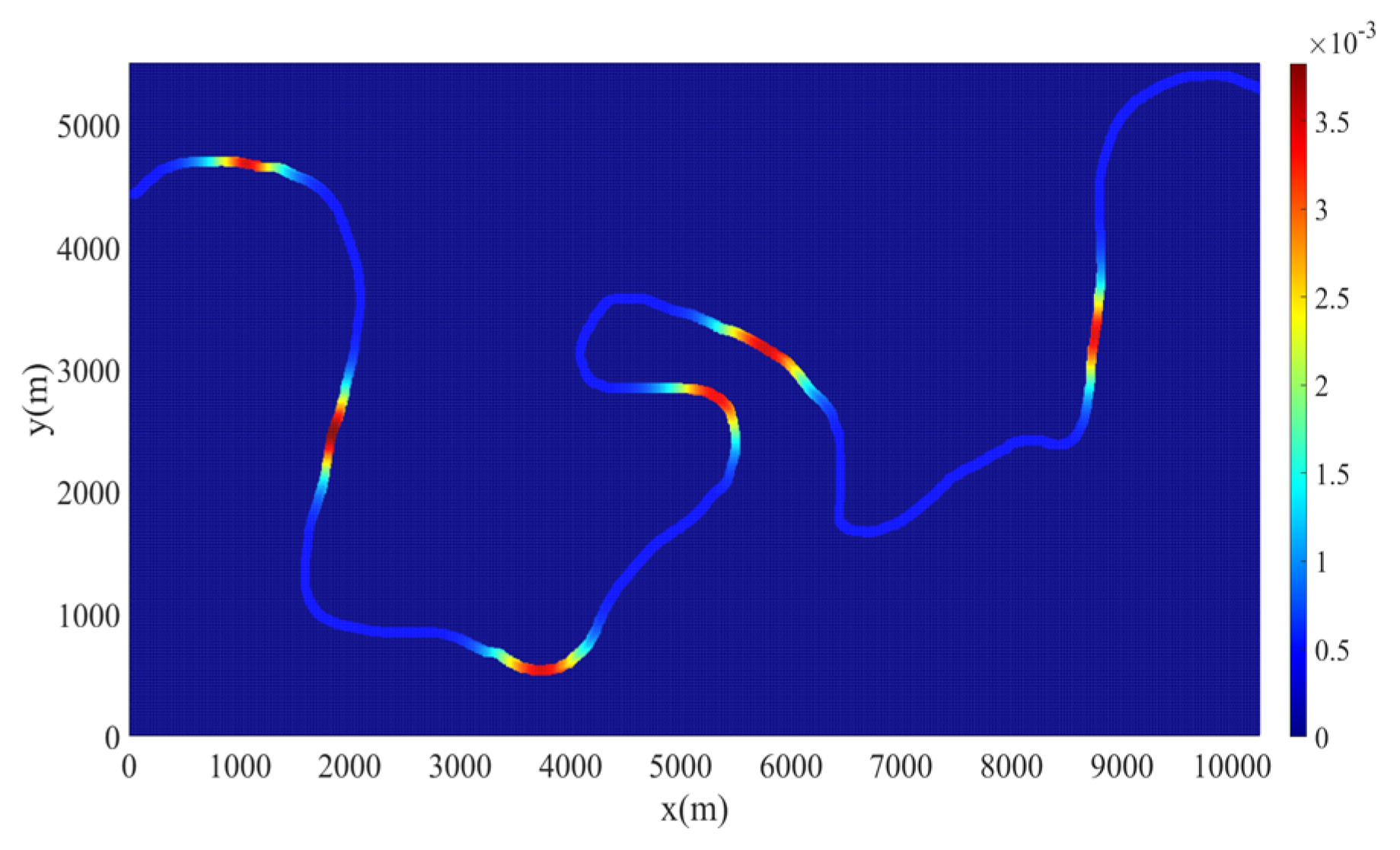
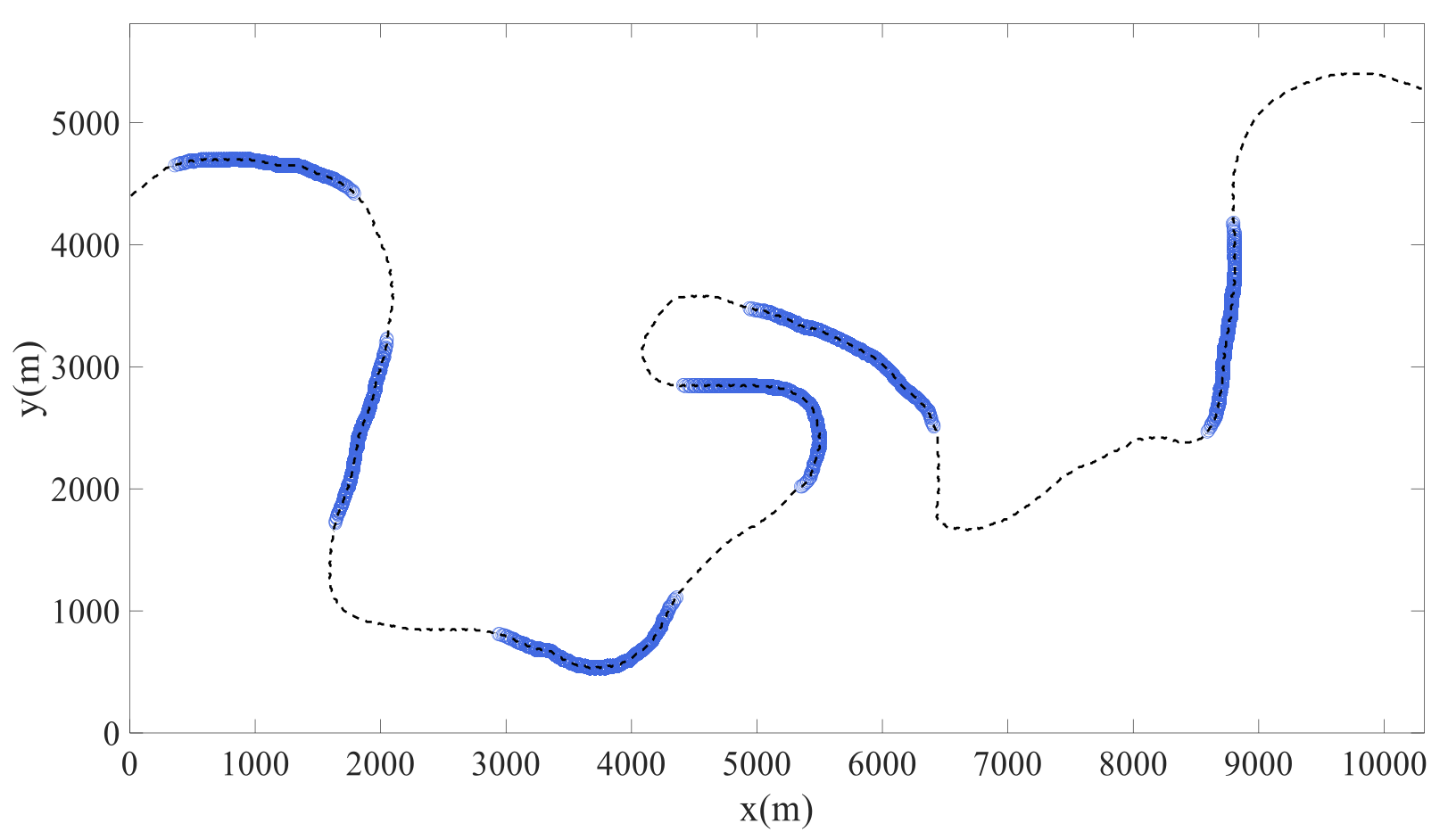
- Based on the original target probability map generated by Parzen windows with 1D Gaussian kernels, several high-value curve segments can be extracted by DBSCAN.
- (2)
- Considering the dynamic characteristics of drifting targets, the boundary of each curve segment is predicted, and the coverage sequence of curve segments is dynamically determined by the rolling SOM (RSOM) neural network.
- (3)
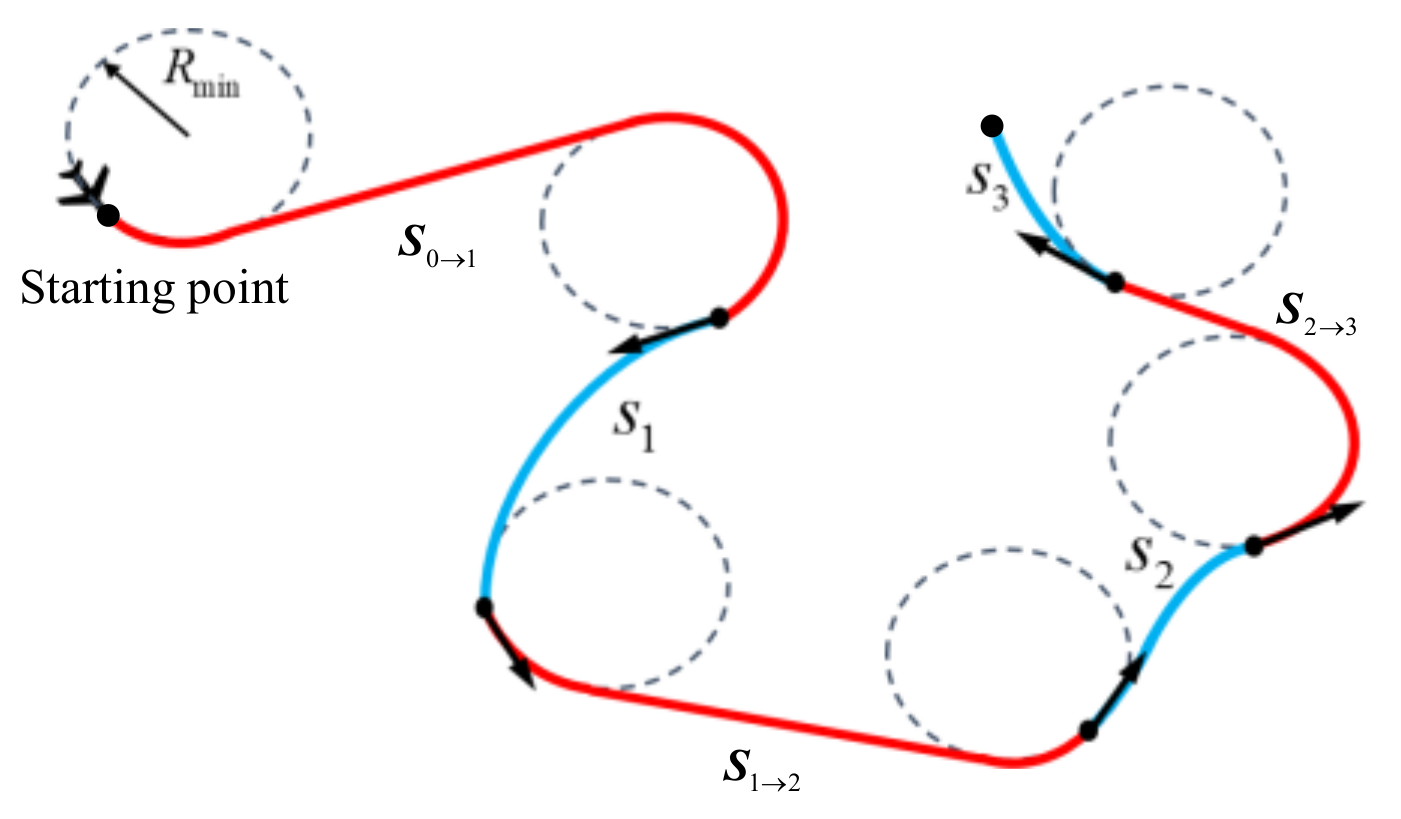
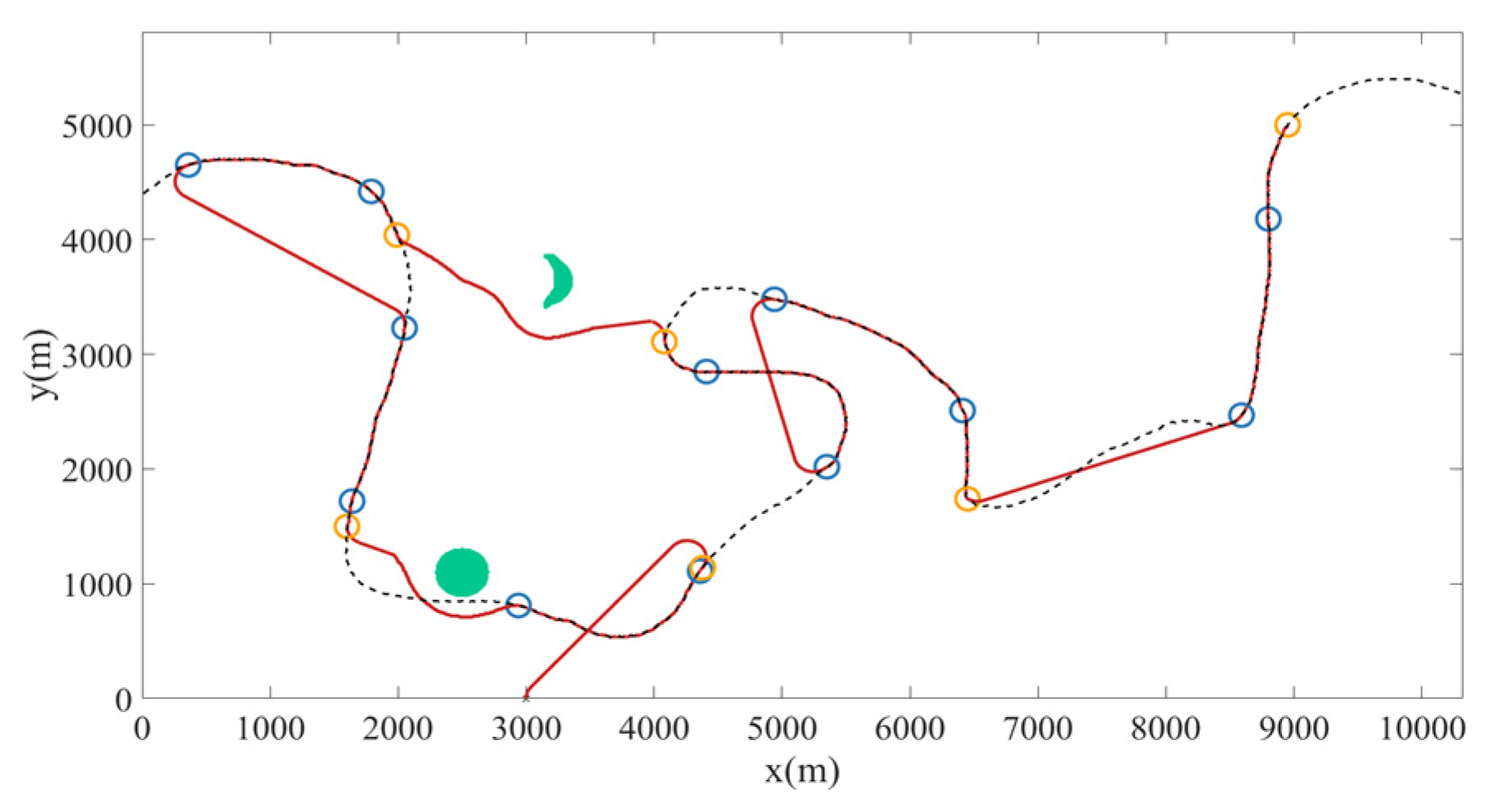
- The whole path of UAVs is a successive combination of coverage paths and transferring paths planned by the Dubins method with modified guidance vector field (MGVF) satisfying the constraints of maneuverability and obstacle avoidance.
2. Problem Formulation
2.1. Simplified UAV Model
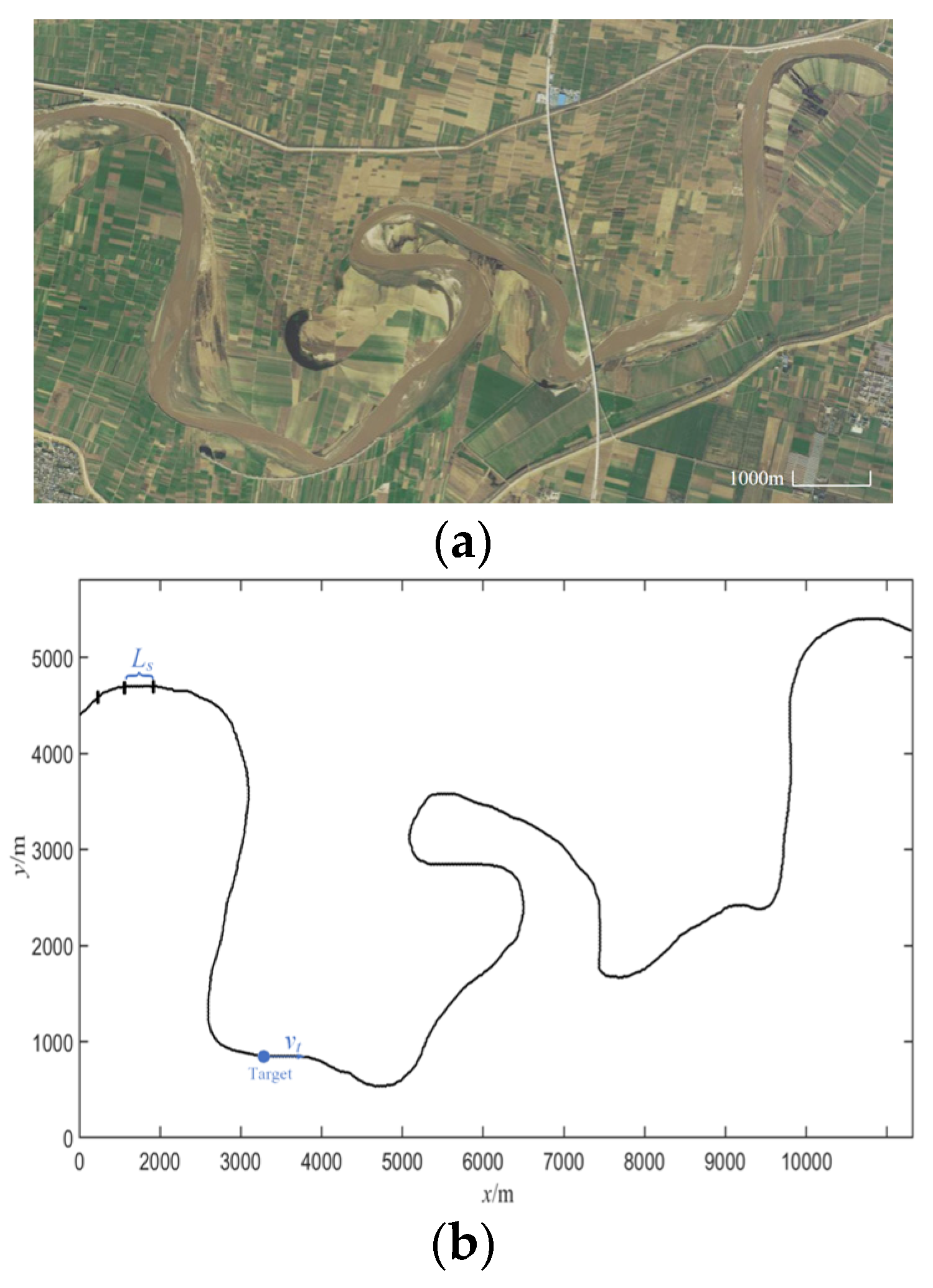
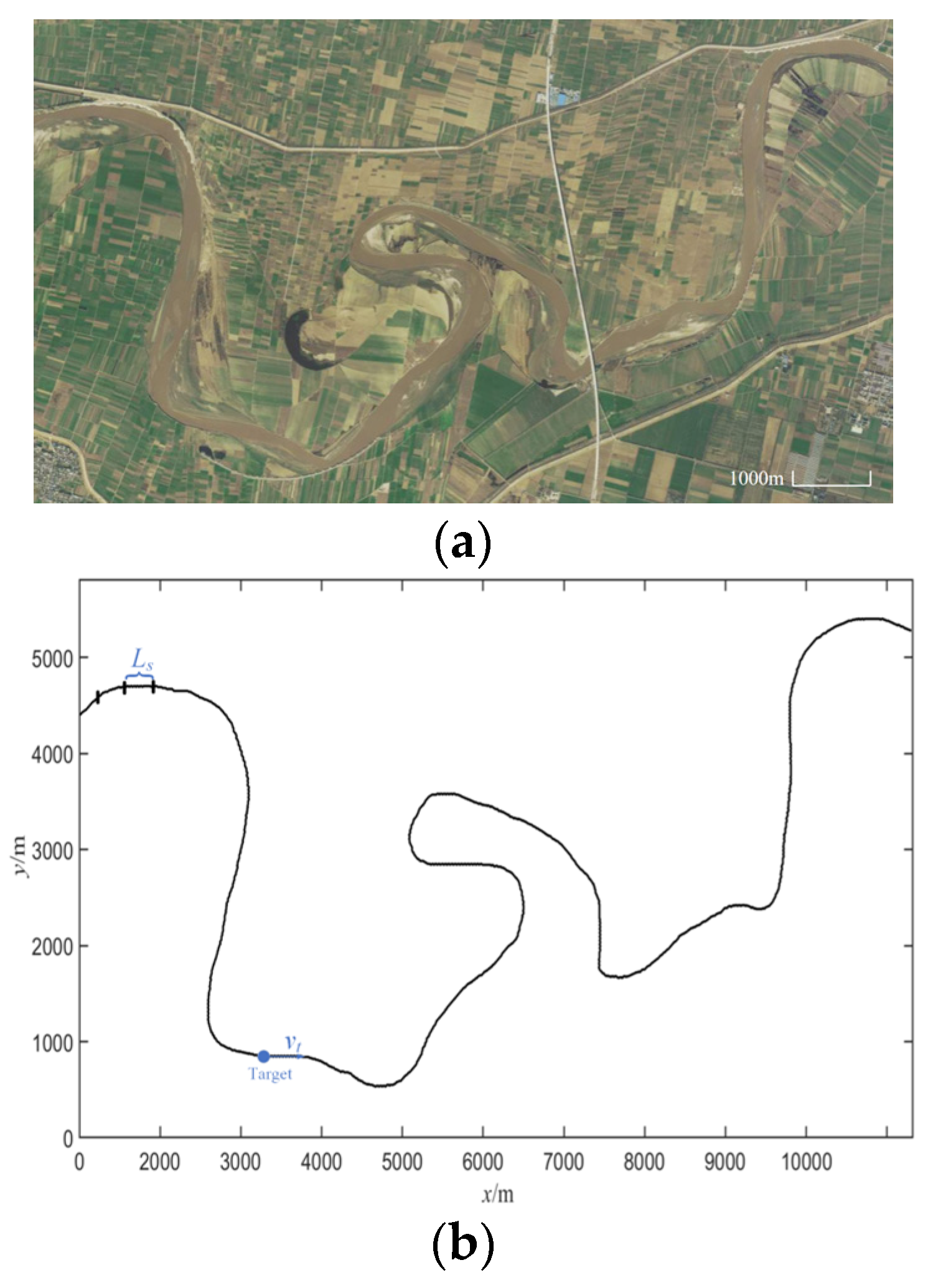
2.2. Environment Model
2.3. Problem Description
3. Three-Layer Hierarchical Heuristic Architecture
3.1. Preliminary Processing of Curve-Shape Area
3.1.1. Generation of Original Target Probability Map
3.1.2. Extraction of High-Value Curve Segments by DBSCAN
3.2. Coverage Sequence of Curve Segments
3.2.1. Prediction of Downstream Boundary by Beta Distribution
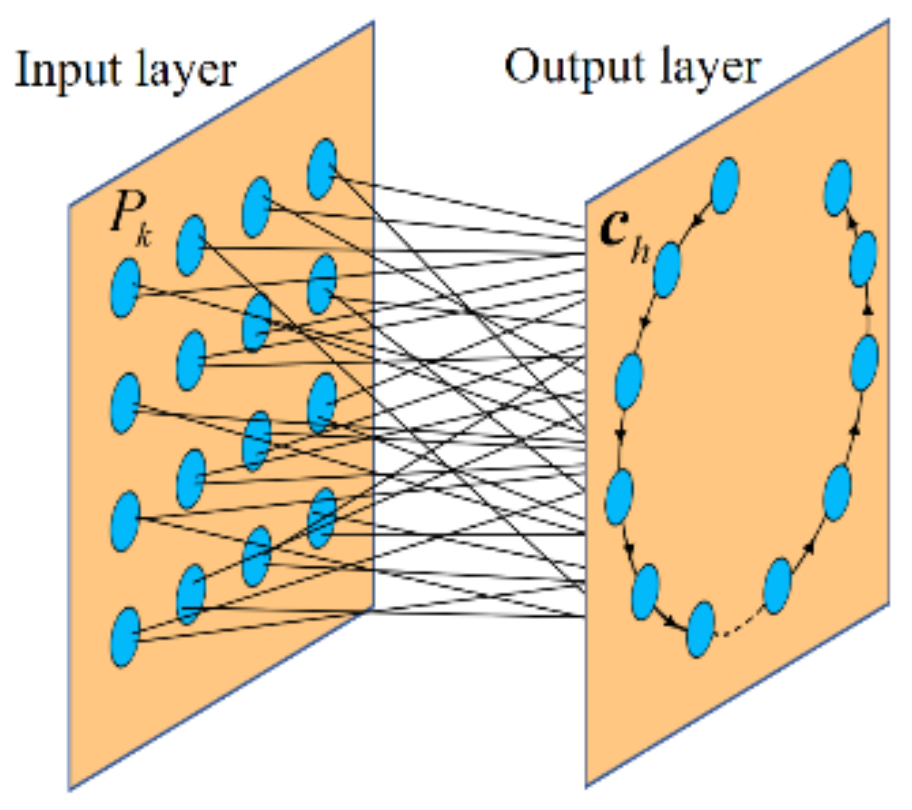
3.2.2. Sorting Curve Segments by RSOM
3.3. UAV Path Planning
3.3.1. UAV Path in Free Environment
3.3.2. UAV Path in Obstacle Environment
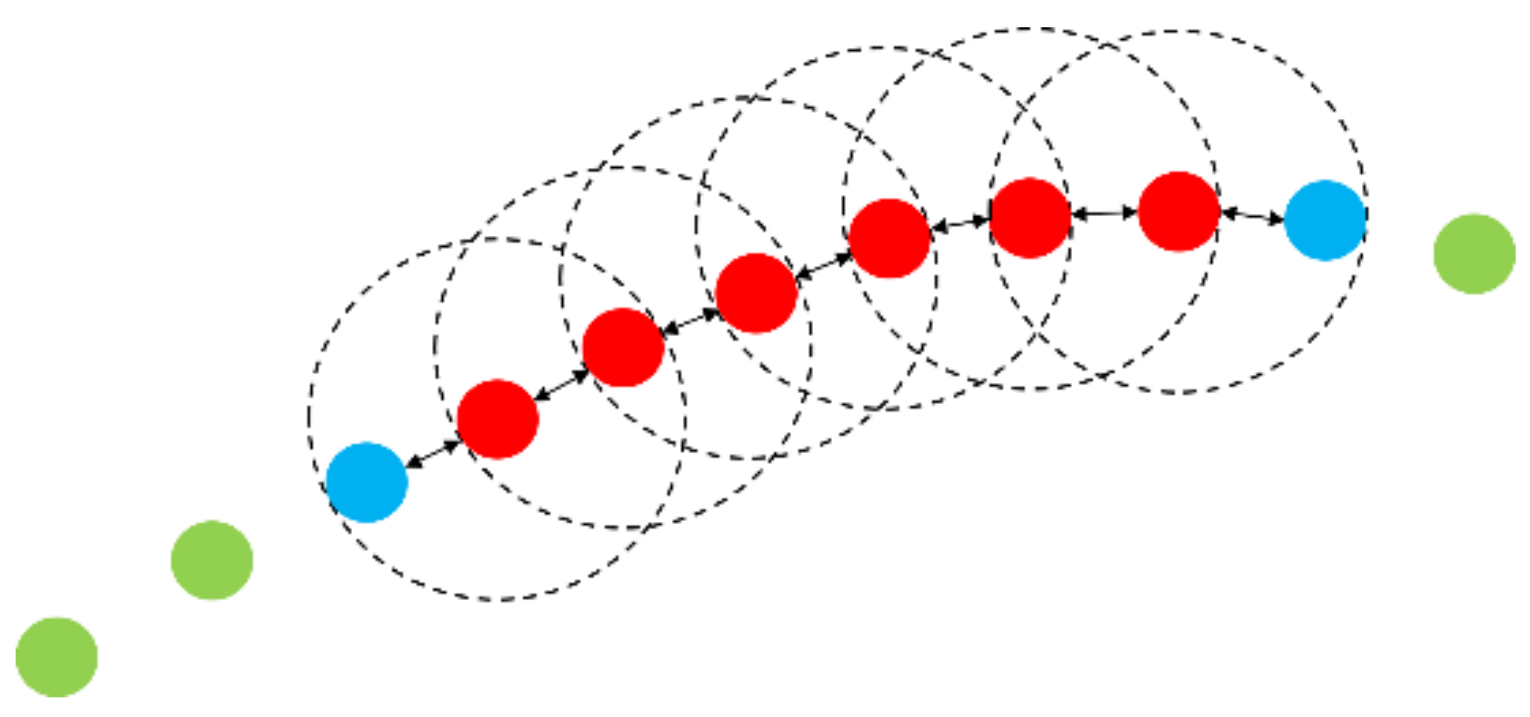
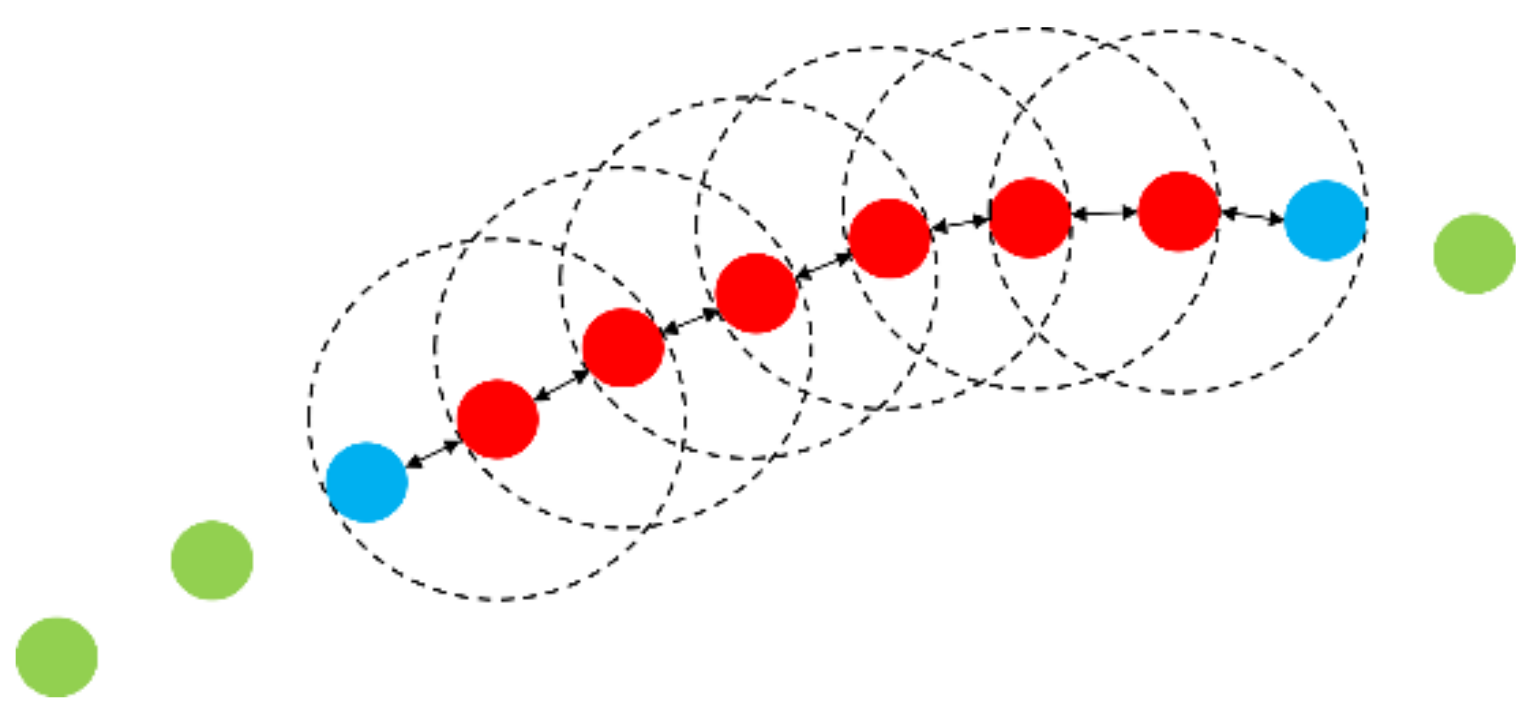
3.4. Constraint of UAV Communication Network
4. Experiment
4.1. Coverage Search by DBSCAN-RSOM
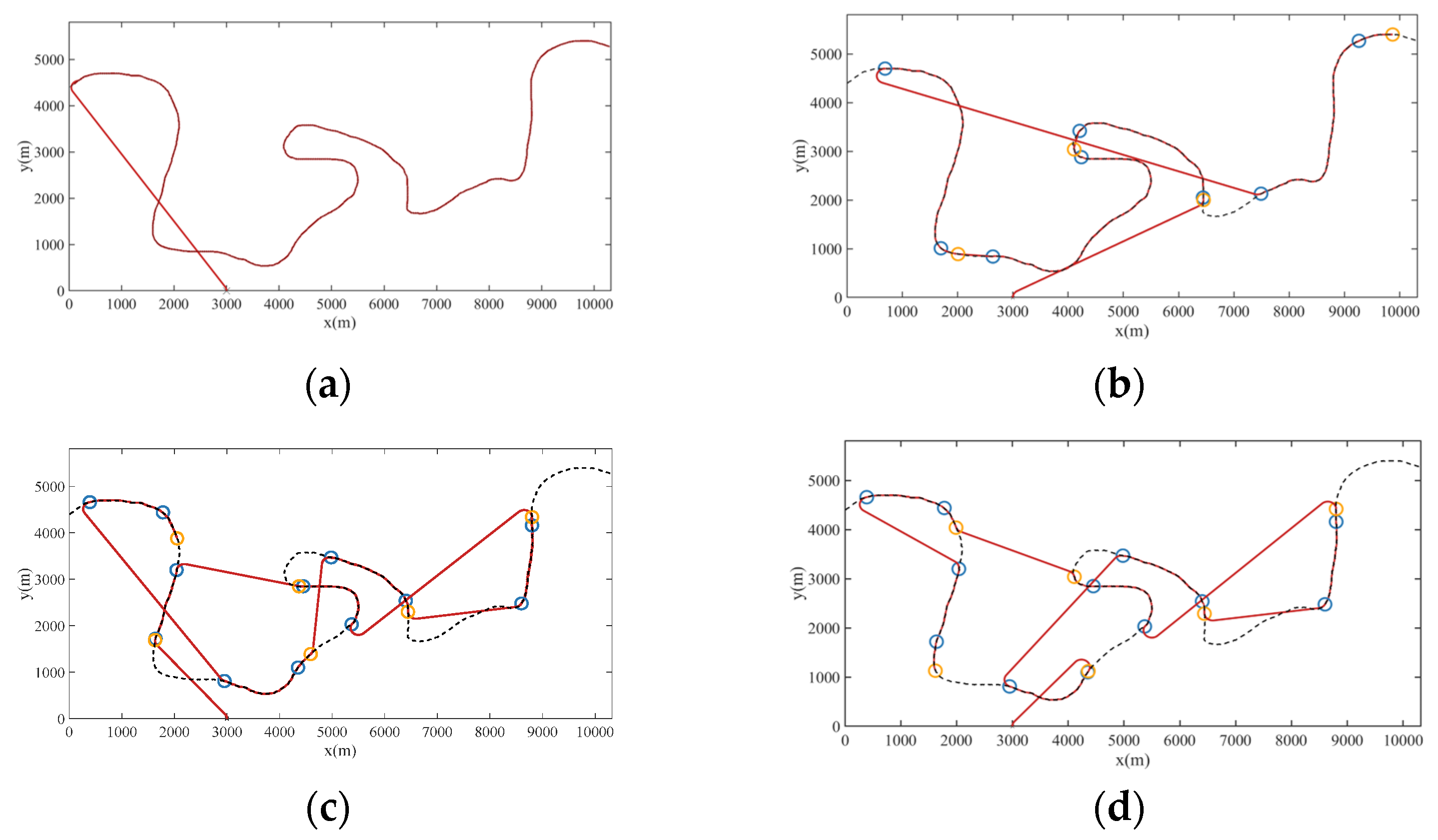
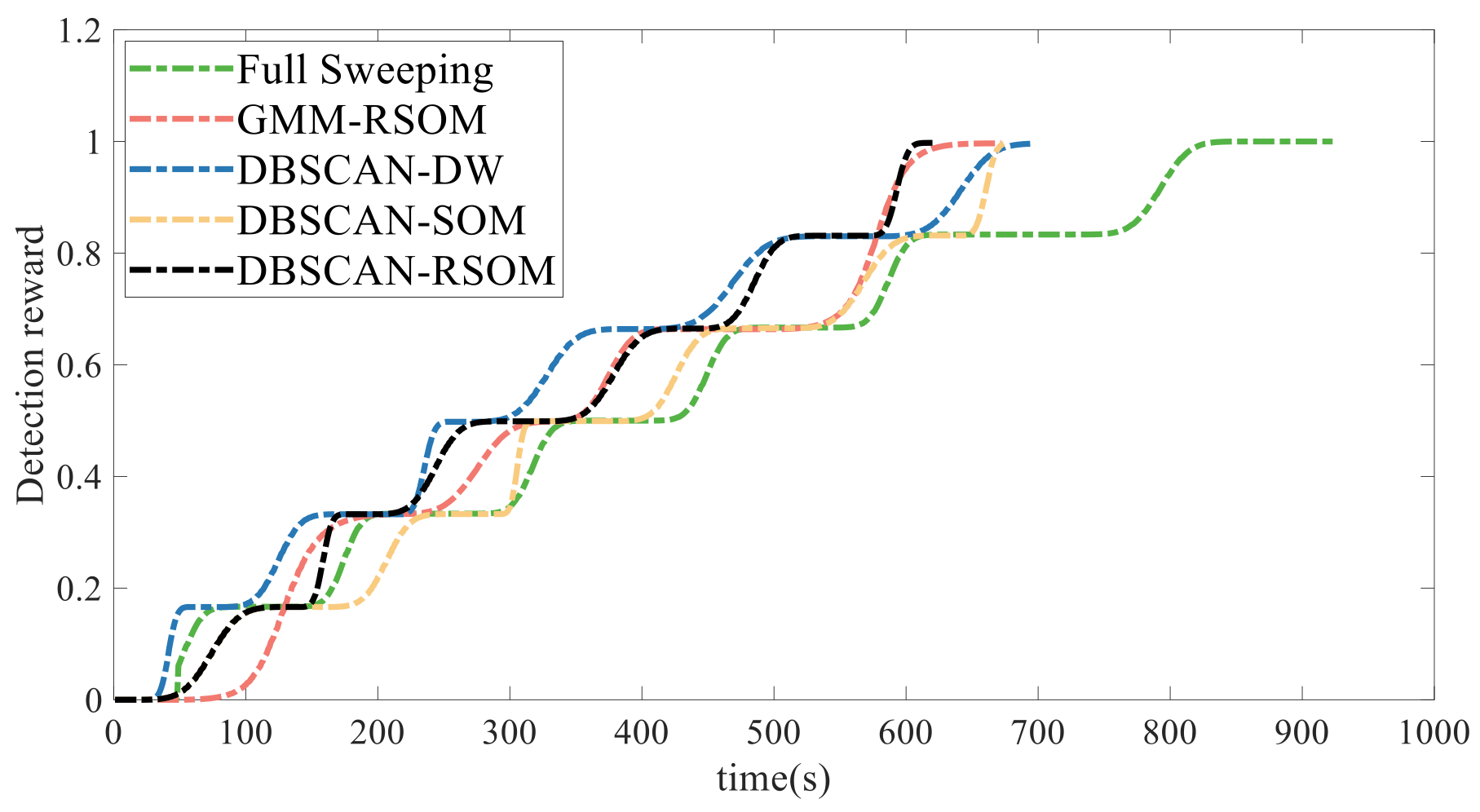
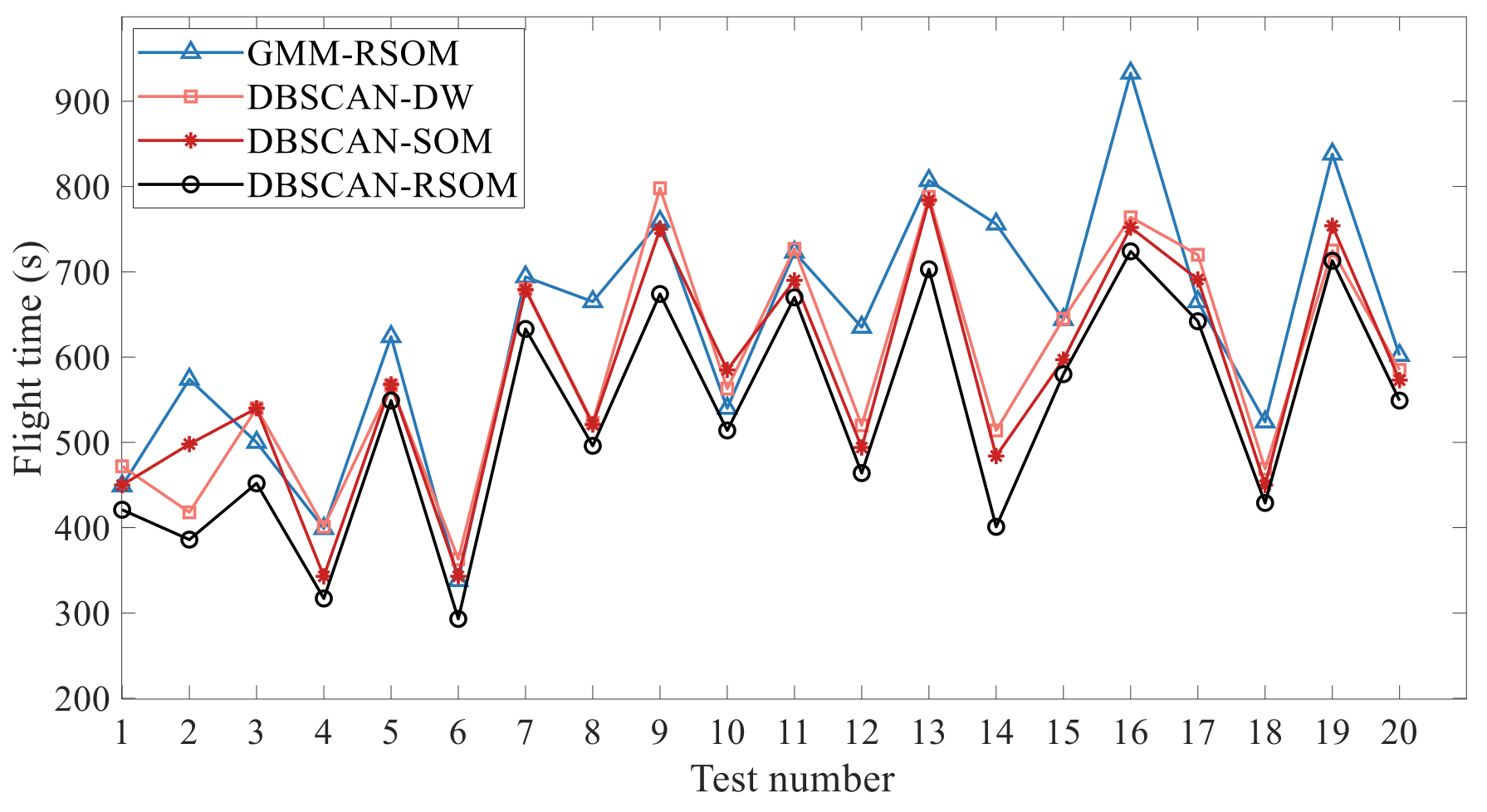
4.2. Comparison of Different Methods
4.3. Real-World Flight Experiment
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Wilhelm, J.P.; Clem, G. Vector field UAV guidance for path following and obstacle avoidance with minimal deviation. J. Guid. Control Dyn. 2019, 42, 1848–1856. [Google Scholar] [CrossRef]
- Akter, R.; Doan, V.S.; Huynh-The, T.; Kim, D.-S. Rfdoa-net: An efficient convnet for rf-based doa estimation in uav surveillance systems. IEEE Trans. Veh. Technol. 2021, 70, 12209–12214. [Google Scholar] [CrossRef]
- Ye, J.; Fu, C.; Lin, F.; Ding, F.; An, S.; Lu, G. Multi-regularized correlation filter for UAV tracking and self-localization. IEEE Trans. Ind. Electron. 2021, 69, 6004–6014. [Google Scholar] [CrossRef]
- Booth, K.E.C.; Piacentini, C.; Bernardini, S.; Beck, J.C. Target search on road networks with range-constrained UAVs and ground-based mobile recharging vehicles. IEEE Robot. Autom. Lett. 2020, 5, 6702–6709. [Google Scholar] [CrossRef]
- Lun, Y.; Wang, H.; Wu, J.; Liu, Y.; Wang, Y. Target Search in Dynamic Environments with Multiple Solar-Powered UAVs. IEEE Trans. Veh. Technol. 2022, 71, 9309–9321. [Google Scholar] [CrossRef]
- Yao, P.; Wang, H. Dynamic Adaptive Ant Lion Optimizer applied to route planning for unmanned aerial vehicle. Soft Comput. 2017, 21, 5475–5488. [Google Scholar] [CrossRef]
- Sarkar, M.; Yan, X.; Erol, B.A.; Raptis, I.; Homaifar, A. A novel search and survey technique for unmanned aerial systems in detecting and estimating the area for wildfires. Robot. Auton. Syst. 2021, 145, 103848. [Google Scholar] [CrossRef]
- Ivić, S.; Crnković, B.; Arbabi, H.; Loire, S.; Clary, P.; Mezić, I. Search strategy in a complex and dynamic environment: The MH370 case. Sci. Rep. 2020, 10, 19640. [Google Scholar] [CrossRef] [PubMed]
- Brown, D.; Sun, L. Dynamic exhaustive mobile target search using unmanned aerial vehicles. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 3413–3423. [Google Scholar] [CrossRef]
- Wang, T.; Qin, R.; Chen, Y.; Snoussi, H.; Choi, C. A reinforcement learning approach for UAV target searching and tracking. Multimed. Tools Appl. 2019, 78, 4347–4364. [Google Scholar] [CrossRef]
- Boulares, M.; Barnawi, A. A novel UAV path planning algorithm to search for floating objects on the ocean surface based on object’s trajectory prediction by regression. Robot. Auton. Syst. 2021, 135, 103673. [Google Scholar] [CrossRef]
- Quamar, M.; ElFerik, S.; Saif, A.-W.A. A Bioinspired Adaptation-Based Algorithm for Swarm of UAVs in multiple threat prone Environments. In Proceedings of the 2023 20th International Multi-Conference on Systems, Signals & Devices (SSD), Mahdia, Tunisia, 20–23 February 2023. [Google Scholar]
- Zhu, K.; Han, B.; Zhang, T. Multi-UAV distributed collaborative coverage for target search using heuristic strategy. Guid. Navig. Control 2021, 1, 2150002. [Google Scholar] [CrossRef]
- Yao, P.; Zhao, Z. Improved Glasius bio-inspired neural network for target search by multi-agents. Inf. Sci. 2021, 568, 40–53. [Google Scholar] [CrossRef]
- Cho, S.W.; Park, H.J.; Lee, H.; Shim, D.H.; Kim, S.-Y. Coverage path planning for multiple unmanned aerial vehicles in maritime search and rescue operations. Comput. Ind. Eng. 2021, 161, 107612. [Google Scholar] [CrossRef]
- Oh, H.; Kim, S.; Tsourdos, A.; White, B.A. Coordinated road-network search route planning by a team of UAVs. Int. J. Syst. Sci. 2014, 45, 825–840. [Google Scholar] [CrossRef]
- Abubakar, A.; Farah, M.; Alsheikh, M.; Saif, A.-W.A. Optimal Altitude Range for Image Collection UAV from Agricultural Areas with Image Resolution and Power Consumption Constraints. In Proceedings of the 2023 20th International Multi-Conference on Systems, Signals & Devices (SSD), Mahdia, Tunisia, 20–23 February 2023; pp. 689–693. [Google Scholar] [CrossRef]
- Li, Y.; Zhang, Z.; Sun, Q.; Huang, Y. A distributed framework for multiple UAV cooperative target search under dynamic environment. J. Frankl. Inst. 2024, 361, 106810. [Google Scholar] [CrossRef]
- Huang, H.; Savkin, A.V.; Huang, C. Decentralized autonomous navigation of a UAV network for road traffic monitoring. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 2558–2564. [Google Scholar] [CrossRef]
- Yao, P.; Xie, Z.; Ren, P. Optimal UAV route planning for coverage search of stationary target in river. IEEE Trans. Control Syst. Technol. 2017, 27, 822–829. [Google Scholar] [CrossRef]
- Li, J.; Li, W.; Zhang, W. Path Planning of UAV Navigation Mark Inspection Using a K-means Clustering ACA. J. Mar. Sci. Technol. 2023, 31, 10. [Google Scholar] [CrossRef]
- Qiu, Z.; Ma, Y.; Fan, F.; Huang, J.; Wu, L.; Du, Y. Improved DBSCAN for Infrared Cluster Small Target Detection. IEEE Geosci. Remote Sens. Lett. 2023, 20, 3329372. [Google Scholar] [CrossRef]
- Zhao, L.; Bi, X.; Dong, Z.; Xiao, N.; Zhao, A. Robust traveling salesman problem with UAV: Balancing risk and makespan in contactless delivery. Int. Trans. Oper. Res. 2024, 31, 167–191. [Google Scholar] [CrossRef]
- Yu, K.; Budhiraja, A.K.; Buebel, S.; Tokekar, P. Algorithms and experiments on routing of unmanned aerial vehicles with mobile recharging stations. J. Field Robot. 2019, 36, 602–616. [Google Scholar] [CrossRef]
- Yao, P.; Lou, Y.; Zhang, K. Multi-USV cooperative path planning by window update based self-organizing map and spectral clustering. Ocean. Eng. 2023, 275, 114140. [Google Scholar] [CrossRef]
- Saif, A.-W.A.; Aliyu, A.; Al Dhaifallah, M.; Elshafei, M. Decentralized backstepping control of a quadrotor with tilted-rotor under wind gusts. Int. J. Control Autom. Syst. 2018, 16, 2458–2472. [Google Scholar] [CrossRef]
- Elfeky, M.; Elshafei, M.; Saif, A.-W.A.; Al-Malki, M.F. Modeling and simulation of quadrotor UAV with tilting rotors. Int. J. Control Autom. Syst. 2016, 14, 1047–1055. [Google Scholar] [CrossRef]
- Zhu, D.; Cao, X.; Sun, B.; Luo, C. Biologically inspired self-organizing map applied to task assignment and path planning of an AUV system. IEEE Trans. Cogn. Dev. Syst. 2018, 10, 304–313. [Google Scholar] [CrossRef]
- Yao, P.; Wei, X. Multi-UAV Information Fusion and Cooperative Trajectory Optimization in Target Search. IEEE Syst. J. 2022, 16, 4325–4333. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Final Reward | Flight Time (s) | Computation Time (s) |
|---|---|---|---|
| Full sweeping | 1 | 923 | 0.91 |
| GMM-RSOM | 0.99 | 671 | 2.33 |
| DBSCAN-DW | 0.99 | 694 | 2.28 |
| DBSCAN-SOM | 0.99 | 674 | 3.38 |
| DBSCAN-RSOM | 0.99 | 620 | 4.03 |
| Method | Final Reward | Flight Time (s) |
|---|---|---|
| Full Sweeping | 1 | 92 |
| DBSCAN-DW | 0.99 | 85 |
| DBSCAN-RSOM | 0.99 | 77 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, L.; Wang, D.; Yu, J.; Yao, P.; Zhong, C.; Fu, D. A Hierarchical Heuristic Architecture for Unmanned Aerial Vehicle Coverage Search with Optical Camera in Curve-Shape Area. Remote Sens. 2024, 16, 1502. https://doi.org/10.3390/rs16091502
Liu L, Wang D, Yu J, Yao P, Zhong C, Fu D. A Hierarchical Heuristic Architecture for Unmanned Aerial Vehicle Coverage Search with Optical Camera in Curve-Shape Area. Remote Sensing. 2024; 16(9):1502. https://doi.org/10.3390/rs16091502
Chicago/Turabian StyleLiu, Lanjun, Dechuan Wang, Jiabin Yu, Peng Yao, Chen Zhong, and Dongfei Fu. 2024. "A Hierarchical Heuristic Architecture for Unmanned Aerial Vehicle Coverage Search with Optical Camera in Curve-Shape Area" Remote Sensing 16, no. 9: 1502. https://doi.org/10.3390/rs16091502
APA StyleLiu, L., Wang, D., Yu, J., Yao, P., Zhong, C., & Fu, D. (2024). A Hierarchical Heuristic Architecture for Unmanned Aerial Vehicle Coverage Search with Optical Camera in Curve-Shape Area. Remote Sensing, 16(9), 1502. https://doi.org/10.3390/rs16091502