
Joint Gravity and Magnetic Inversion Using CNNs’ Deep Learning
 ,
,  , and
, and {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Methodology
2.1. Forward Simulation of Gravity and Magnetic Fields
2.2. Joint Inversion of Gravity and Magnetic Potential Fields Based on Convolutional Neural Networks
2.3. Data Preparation
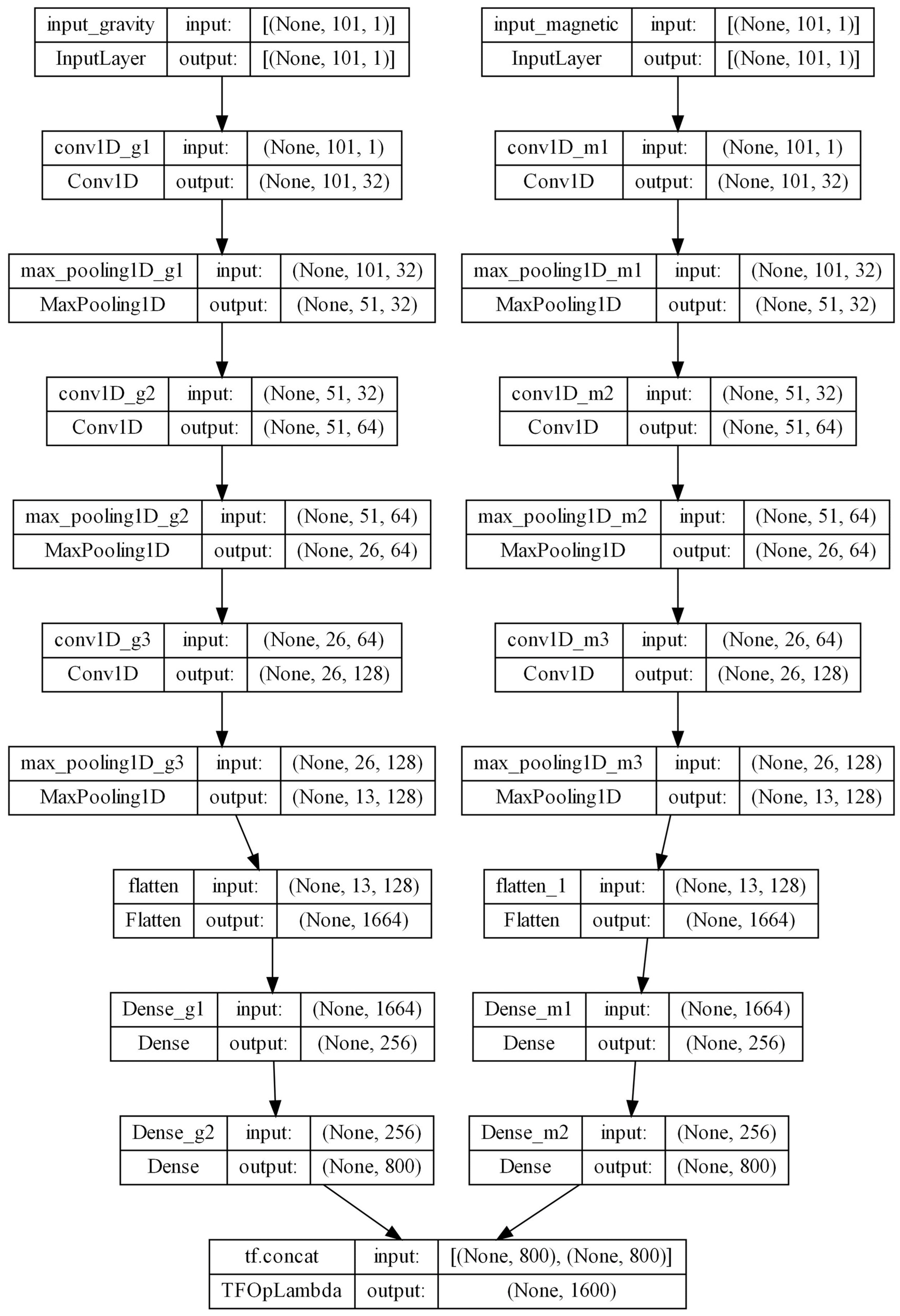
2.4. Network Architecture
2.5. Physical Informed Loss Function
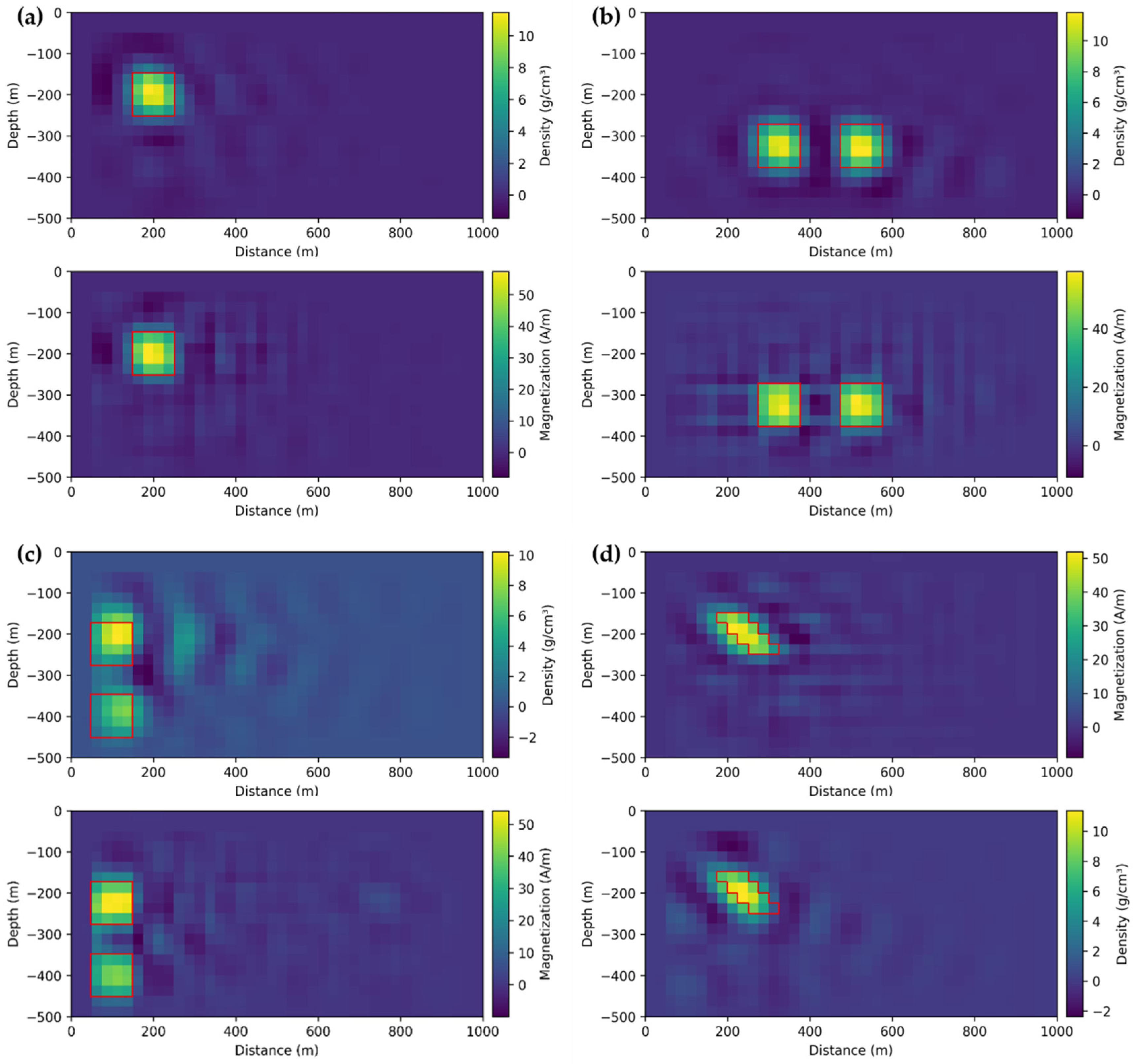
3. Synthetic Experiments
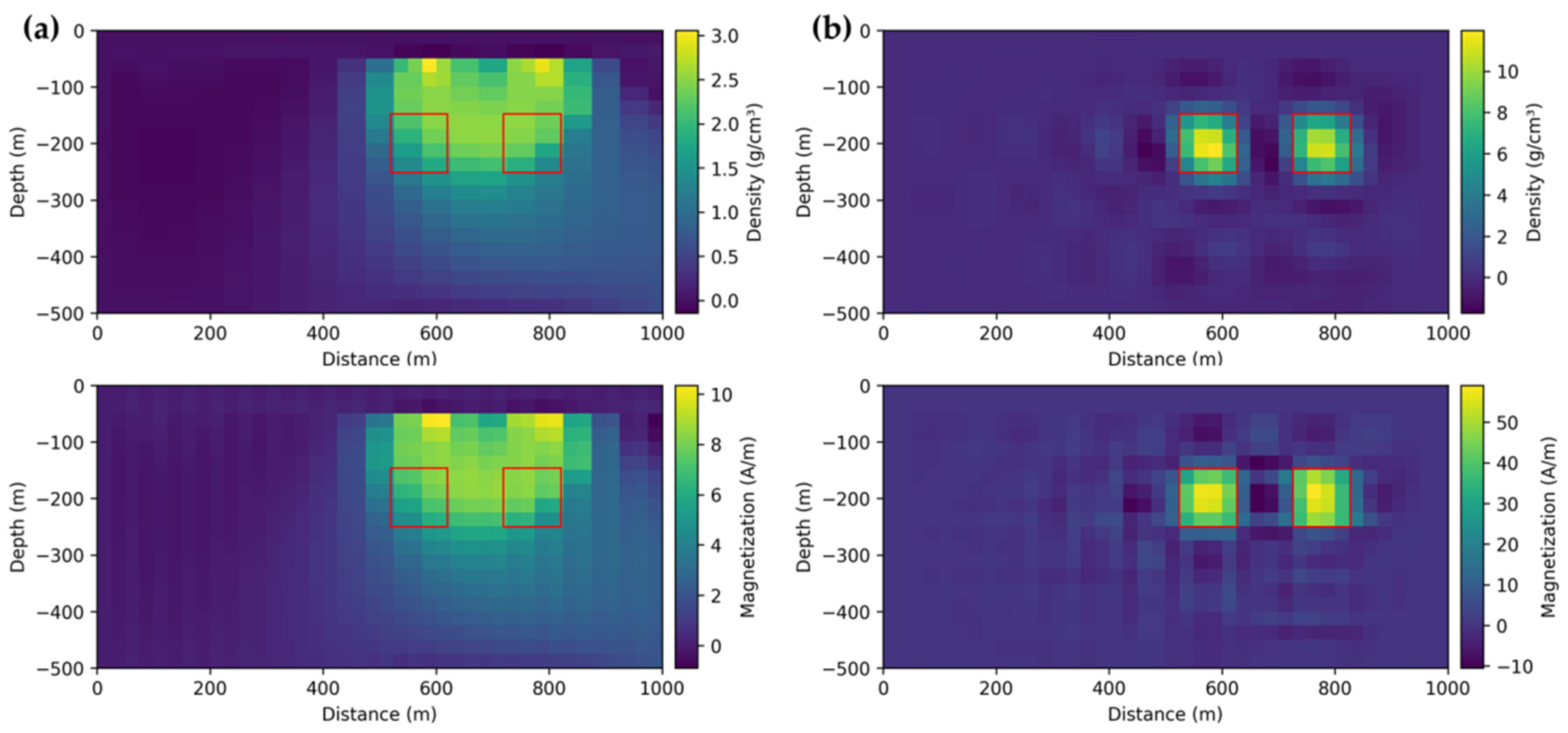
4. Comparison of GMNet Machine Learning Method and Cross-Gradient-Based Joint Inversion Method
4.1. Cross-Gradients
- (1)
- The gradient of a point within the scalar field indicates the direction of fastest growth, with its magnitude signifying the rate of change in the scalar field at that point;
- (2)
- The cross-product of two vectors equals the product of their magnitudes multiplied by sinθ, where θ represents the angle between the two vectors. When the two vectors are parallel, resulting in an angle of 0 or 180 degrees, and sinθ becomes zero, the cross-product equates to zero as well.
- (1)
- If both physical parameters involved in the joint inversion change in the same direction, or if one physical parameter remains unchanged, the cross-gradient function assumes a value of zero.
- (2)
- Conversely, when the gradient of the two physical parameters is not parallel, the cross-gradient function does not equal zero.
4.2. Comparison of Cross-Gradients-Based Inversion with GMNet Inversion
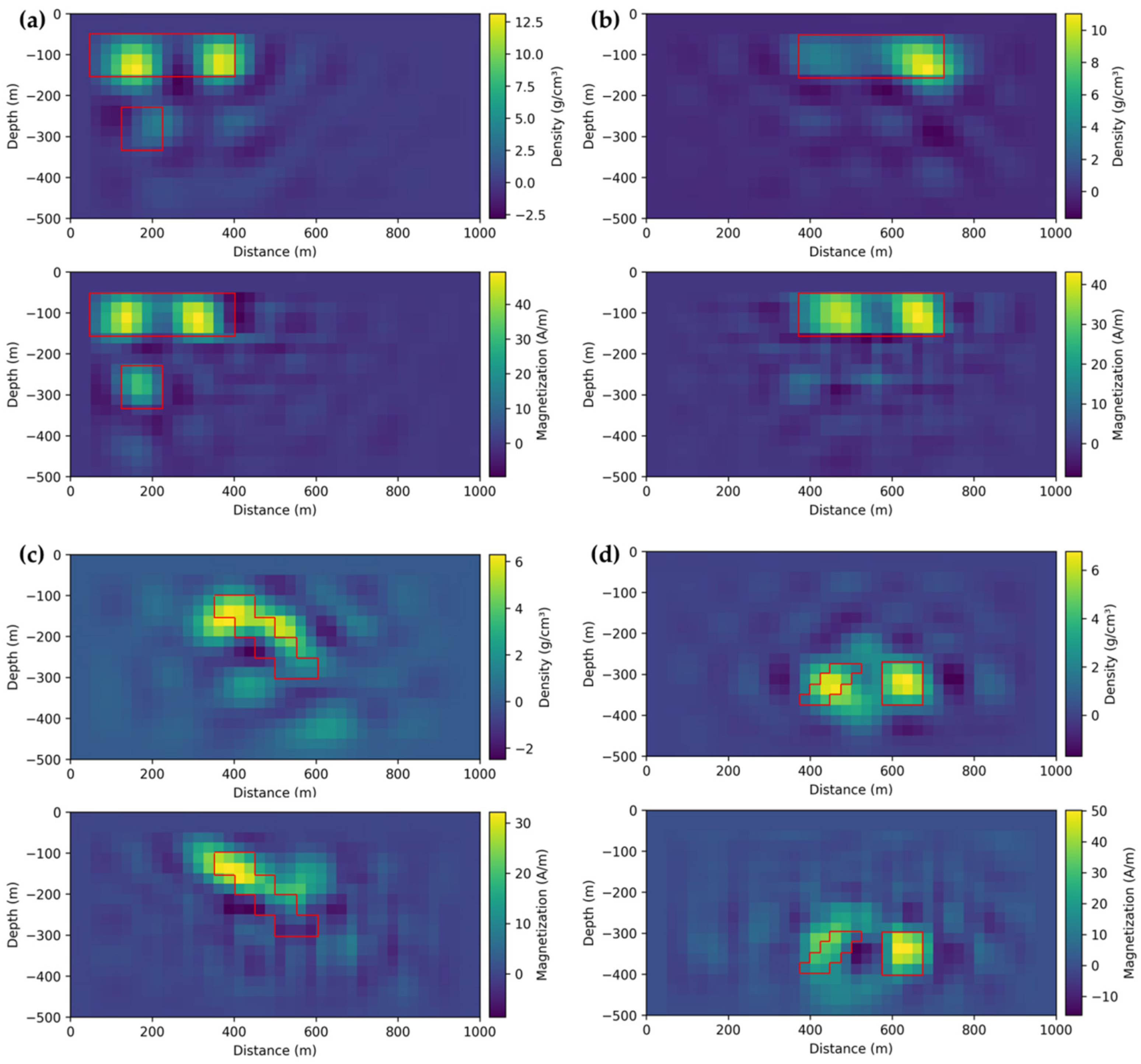
5. Testing Model Inversion
6. Field Example
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhdanov, M.S. Geophysical Inverse Theory and Regularization Problems; Elsevier: Amsterdam, The Netherlands, 2002. [Google Scholar]
- Zeng, H.L. Gravity Field and Gravity Exploration; Geological Press: Beijing, China, 2005. [Google Scholar]
- Guan, Z.N. Geomagnetic Field and Magnetic Exploration; Geological Press: Beijing, China, 2005. [Google Scholar]
- Phillips, N.D. Geophysical Inversion in an Integrated Exploration Program: Examples from the San Nicolas Deposit. Master’s Thesis, University of British Columbia, Vancouver, BC, Canada, 2001. [Google Scholar]
- Lane, R.; FitzGerald, D.; Guillen, A.; Seikel, R.; Mclnerey, P. Lithologically constrained inversion of magnetic and gravity data sets. In Proceedings of the 10th SAGA Biennial Technical Meeting and Exhibition, Wild Coast, South Africa, 22–26 October 2007; Volume 129, pp. 11–17. [Google Scholar]
- Farquharson, C.G.; Ash, M.R.; Miller, H.G. Geologically constrained gravity inversion for the Voisey’s Bay ovoid deposit. Lead. Edge 2008, 27, 64–69. [Google Scholar] [CrossRef]
- Williams, N.C. Geologically-Constrained UBC-GIF Gravity and Magnetic Inversions with Examples from the Agnew-Wiluna Greenstone Belt, Western Australia. Ph.D. Thesis, University of British Columbia, Vancouver, BC, Canada, 2008. [Google Scholar]
- Lelièvre, P.G. Integrating Geologic and Geophysical Data through Advanced Constrained Inversions. Ph.D. Thesis, University of British Columbia, Vancouver, BC, Canada, 2009. [Google Scholar]
- Moorkamp, M.; Heincke, B.; Jegen, M.; Hobbs, R.; Henderson, D. Joint inversion of MT, gravity and seismic data applied to sub-basalt imaging. In Proceedings of the International Workshop on Electromagnetic Induction in the Earth, Beijing, China, 23–29 October 2008. [Google Scholar]
- Gallardo, L.A.; Meju, M.A. Characterization of heterogeneous near-surface materials by joint 2D inversion of dc resistivity and seismic data. Geophys. Res. Lett. 2003, 30, 183–196. [Google Scholar] [CrossRef]
- Zhang, Y.P.; Wang, Y.F. Three-dimensional gravity-magnetic cross-gradient joint inversion based on structural coupling and a fast gradient method. J. Comput. Math. 2019, 37, 758–777. [Google Scholar]
- Sun, J.; Li, Y. Multidomain petrophysically constrained inversion and geology differentiation using guided fuzzy c-means clustering. Geophysics 2015, 80, ID1–ID181. [Google Scholar] [CrossRef]
- Samuel, A.L. Some studies in machine learning using the game of checkers. IBM J. Res. Dev. 1959, 3, 210–229. [Google Scholar] [CrossRef]
- Mitchell, T.M. Machine Learning; McGraw-Hill Higher Education: New York, NY, USA, 1997. [Google Scholar]
- Dowla, F.U.; Taylor, S.R.; Anderson, R.W. Seismic discrimination with artificial neural networks: Preliminary results with regional spectral data. Bull. Seismol. Soc. Am. 1990, 80, 1346–1373. [Google Scholar]
- Zhao, X.; Mendel, J.M. 1988. Minimum-variance deconvolution using artificial neural networks. In SEG Technical Program Expanded Abstracts; Society of Exploration Geophysicists: Houston, TX, USA, 1988; pp. 738–741. [Google Scholar]
- Li, J.; Liu, Y.; Yin, C.; Ren, X.; Su, Y. Fast imaging of time-domain airborne EM data using deep learning technology. Geophysics 2020, 85, E163–E170. [Google Scholar] [CrossRef]
- Moghadas, D. One-dimensional deep learning inversion of electromagnetic induction data using convolutional neural network. Geophys. J. Int. 2020, 222, 247–259. [Google Scholar] [CrossRef]
- Wu, B.; Meng, D.; Wang, L.; Liu, N.; Wang, Y. Seismic impedance inversion using fully convolutional residual network and transfer learning. IEEE Geosci. Remote Sens. Lett. 2020, 17, 1–5. [Google Scholar] [CrossRef]
- Nurindrawati, F.; Sun, J. Predicting magnetization directions using convolutional neural networks. J. Geophys. Res. Solid Earth 2020, 125, e2020JB019675. [Google Scholar] [CrossRef]
- Li, Y.; Yang, D. Electrical imaging of hydraulic fracturing fluid using steel-cased wells and a deep-learning method. Geophysics 2021, 86, E315–E332. [Google Scholar] [CrossRef]
- He, S.; Cai, H.; Liu, S.; Xie, J.; Hu, X. Recovering 3D Basement Relief Using Gravity Data Through Convolutional Neural Networks. J. Geophys. Res. Solid Earth 2021, 126, e2021JB022611. [Google Scholar] [CrossRef]
- Huang, R.; Liu, S.; Qi, R.; Zhang, Y. Deep learning 3D sparse inversion of gravity data. J. Geophys. Res. Solid Earth 2021, 126, e2021JB022476. [Google Scholar] [CrossRef]
- Yang, Q.; Hu, X.; Liu, S.; Jie, Q.; Wang, H.; Chen, Q. 3-D gravity inversion based on deep convolution neural networks. IEEE Geosci. Remote Sens. Lett. 2021, 19, 1–5. [Google Scholar] [CrossRef]
- Zhang, L.; Zhang, G.; Liu, Y.; Fan, Z. Deep learning for 3-D inversion of gravity data. IEEE Trans. Geosci. Remote Sens. 2021, 60, 1–18. [Google Scholar] [CrossRef]
- Bergen, K.J.; Johnson, P.A.; Maarten, V.; Beroza, G.C. Machine learning for data-driven discovery in solid Earth geoscience. Science 2019, 363, eaau0323. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.F.; Volkov, V.T.; Yagola, A.G. Basic Theory of Inverse Problems: Variational Analysis and Geoscience Applications; Science Press: Beijing, China, 2021. [Google Scholar]
- Wang, Y.F.; Zou, A.Q. Regularization and optimization methods for micro pore structure analysis of shale based on neural networks. Acta Petrol. Sin. 2018, 34, 281–288. [Google Scholar]
- Yang, F.; Ma, J. Deep-learning inversion: A next-generation seismic velocity model building method. Geophysics 2019, 84, R583–R599. [Google Scholar] [CrossRef]
- Kevin, J.; Koray, K.; Marc’Aurelio, R.; Yann, L. What is the best multi-stage architecture for object recognition? In Proceedings of the IEEE 12th International Conference on Computer Vision, Kyoto, Japan, 27 September–4 October 2009. [Google Scholar] [CrossRef]
- Kingma, D.P.; Ba, J. Adam: A method for stochastic optimization. arXiv 2014. [Google Scholar] [CrossRef]
- Gao, J.; Zhang, H.J. An efficient sequential strategy for realizing cross-gradient joint inversion: Method and its application to two-dimensional cross borehole seismic travel time and DC resistivity tomography. Geophys. J. Int. 2018, 213, 1044–1055. [Google Scholar]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bai, Z.; Wang, Y.; Wang, C.; Yu, C.; Lukyanenko, D.; Stepanova, I.; Yagola, A.G. Joint Gravity and Magnetic Inversion Using CNNs’ Deep Learning. Remote Sens. 2024, 16, 1115. https://doi.org/10.3390/rs16071115
Bai Z, Wang Y, Wang C, Yu C, Lukyanenko D, Stepanova I, Yagola AG. Joint Gravity and Magnetic Inversion Using CNNs’ Deep Learning. Remote Sensing. 2024; 16(7):1115. https://doi.org/10.3390/rs16071115
Chicago/Turabian StyleBai, Zhijing, Yanfei Wang, Chenzhang Wang, Caixia Yu, Dmitry Lukyanenko, Inna Stepanova, and Anatoly G. Yagola. 2024. "Joint Gravity and Magnetic Inversion Using CNNs’ Deep Learning" Remote Sensing 16, no. 7: 1115. https://doi.org/10.3390/rs16071115
APA StyleBai, Z., Wang, Y., Wang, C., Yu, C., Lukyanenko, D., Stepanova, I., & Yagola, A. G. (2024). Joint Gravity and Magnetic Inversion Using CNNs’ Deep Learning. Remote Sensing, 16(7), 1115. https://doi.org/10.3390/rs16071115