
High-Quality Radar Pulse Signal Acquisition and Deinterleaving under a Low Signal-to-Noise Ratio with Multi-Layer Particle Swarm Optimization


Abstract

1. Introduction
- In this paper, a non-cooperative radar signal detection and high-quality pulse signal extraction algorithm based on PSO is developed, which can work under pulse interleaving with low SNR.
- The radar signal deinterleaving is achieved by constructing a multi-layer PSO model with good robustness at low SNR. The proposed algorithm can accurately identify and separate the signals from different radar sources and is not sensitive to leakage pulses and false alarms.
2. Reconnaissance Model and Problem Formulation
3. The Proposed Radar Pulse Signal Acquisition and Deinterleaving Algorithm
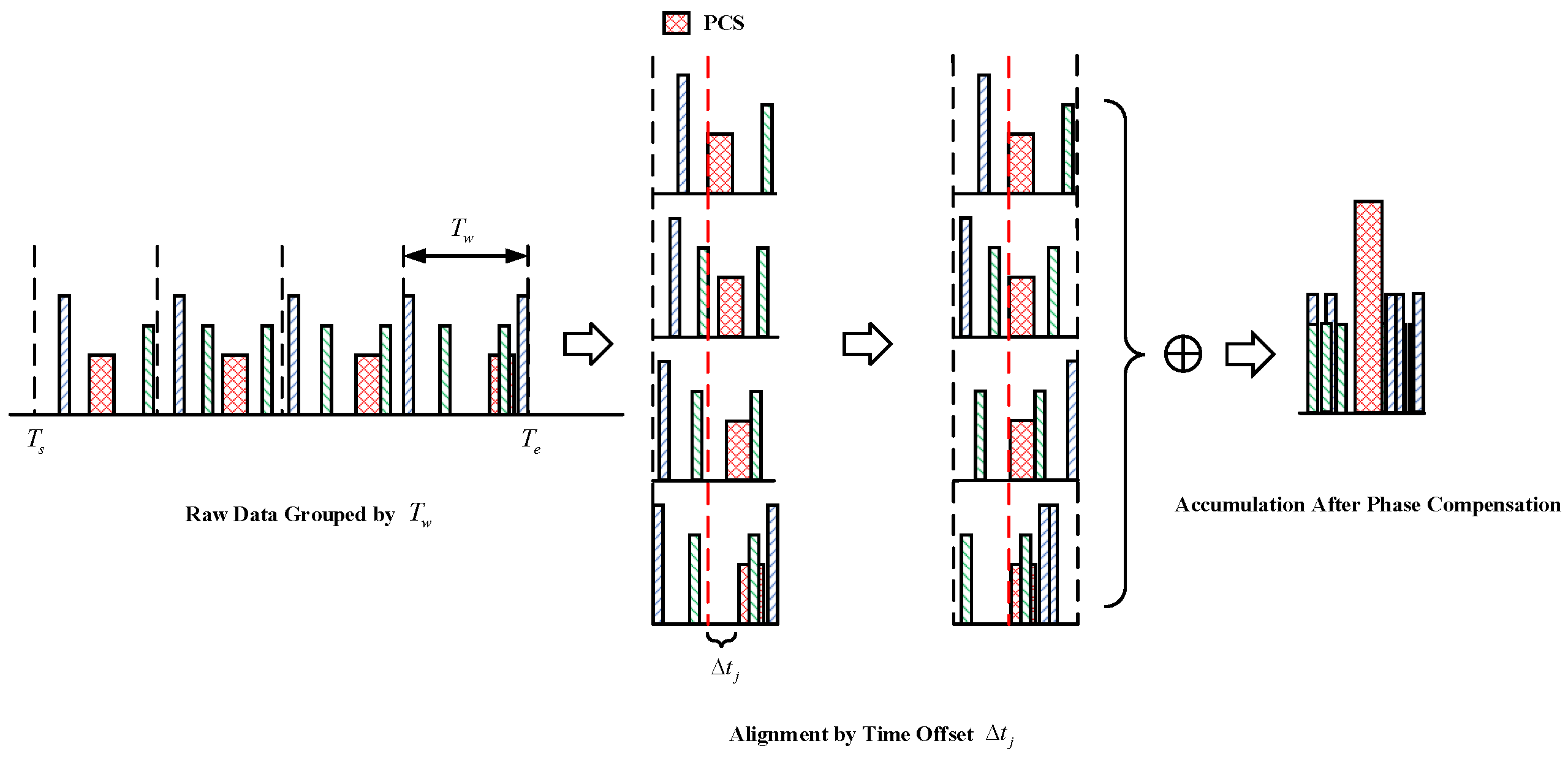
3.1. Blind Extraction of Pulse Signal Based on PSO
| Algorithm 1: High-quality pulse signal acquisition based on PSO algorithm |
| Input: The received interleaved signal . |
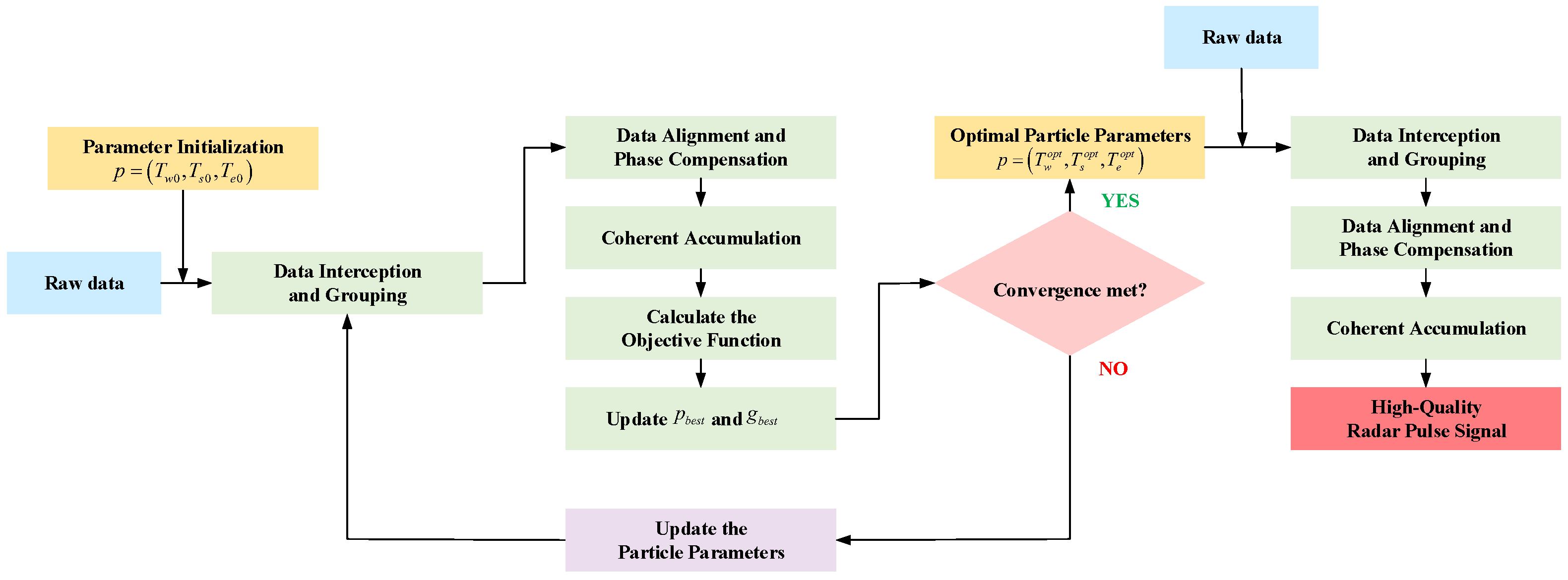
| Step 1: Initialize particle parameter . |
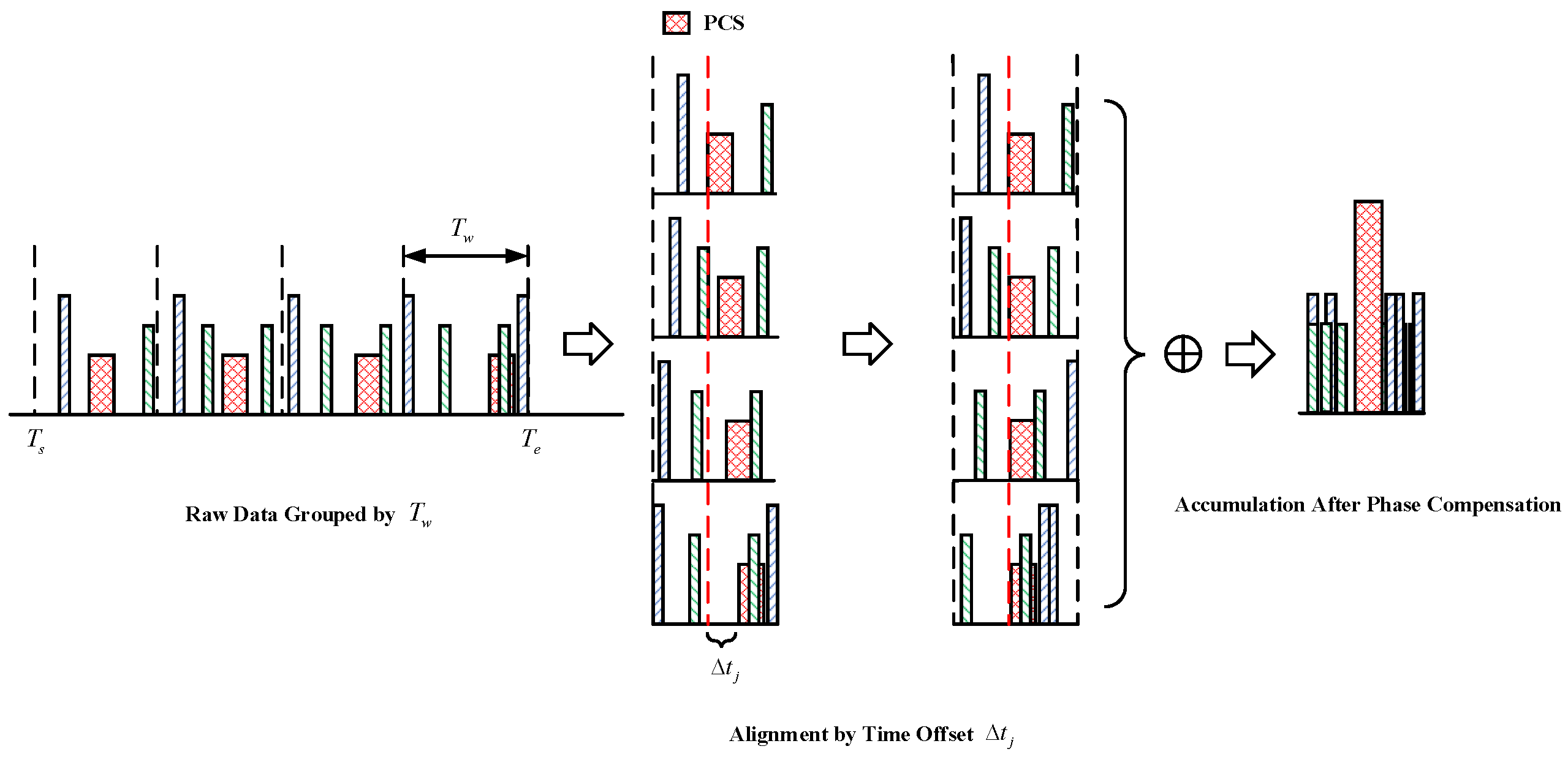
| Step 2: Grouping and accumulating the signal with particle parameter according to Equations from (6) to (12). |
| Step 3: Based on the accumulated data, calculating the objective function according to (13). |
| Step 4: Evaluate the objective function of the current particle parameter p and its optimal parameter and update . |
| Step 5: Evaluate the objective function of the current particle parameter p and the global optimal parameter and update . |
| Step 6: Update the particle position and velocity according to (17) and (18). |
| Step 7: Repeat step 2 to step 6 until the maximum number of iterations or reach the objective function threshold. |
| Output: The optimal particle parameter and high-quality radar pulse signal . |
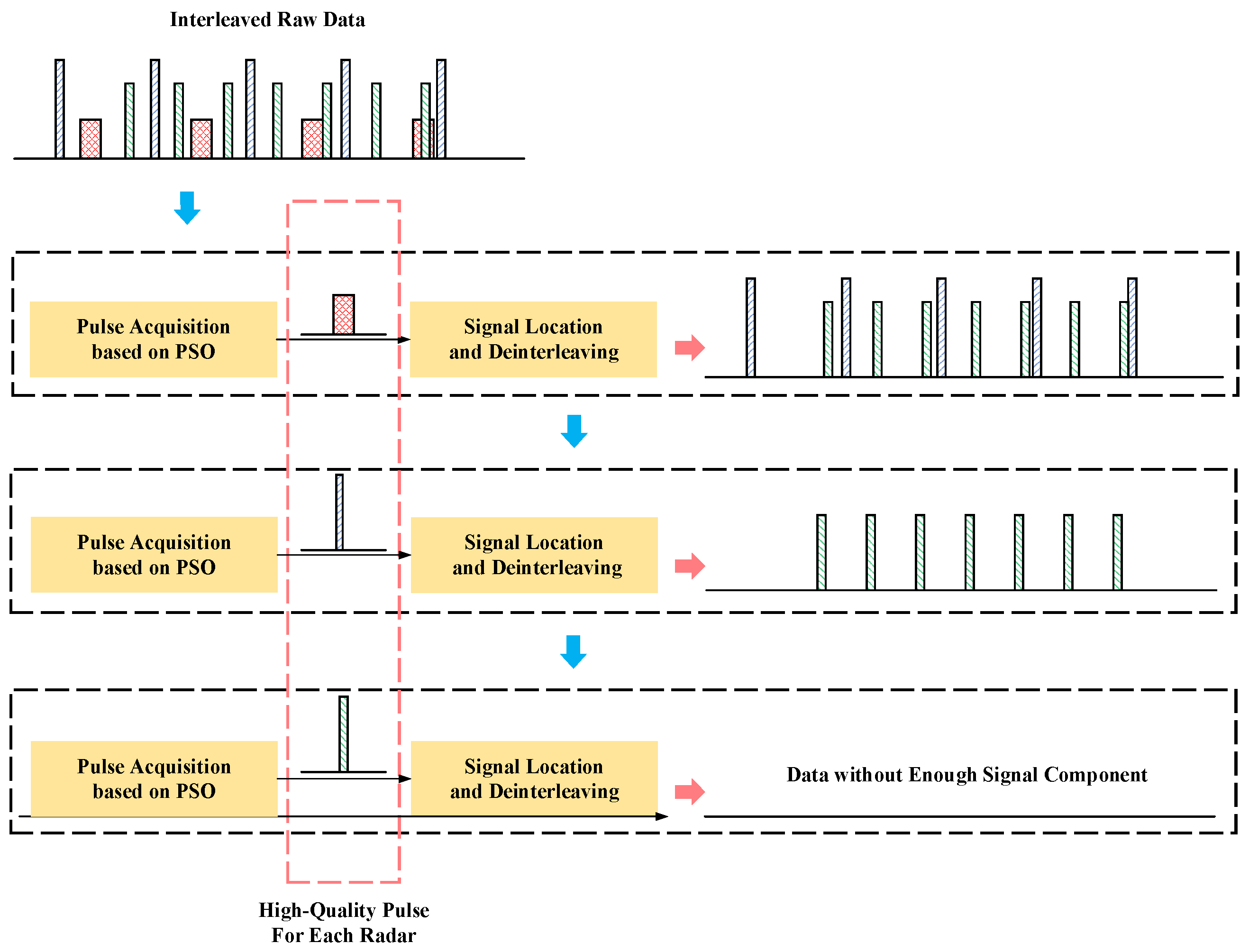
3.2. Multi-Layer PSO for Pulse Deinterleaving
| Algorithm 2: signal deinterleaving under multi-layer PSO |
| Input: The high quality pulse signal obtained by Algorithm 1. |
| Step 1: Construct matching filter based on according to Equation (19). |
| Step 2: Signals from the same radar source are located by (22). |
| Step 3: All the pulse signals are deinterleaved from the received signal according to (24). |
| Step 4: Update and enter into the next layer PSO. |
| Step 5: Re-perform Algorithm 1 and repeat Step 1 to Step 4 until . |
| Step 6: Update the particle position and velocity according to (17) and (18). |
| Output: All the radar source signals are deinterleaved from and the high-quality radar pulse signal of each radar source. |
4. Experiments
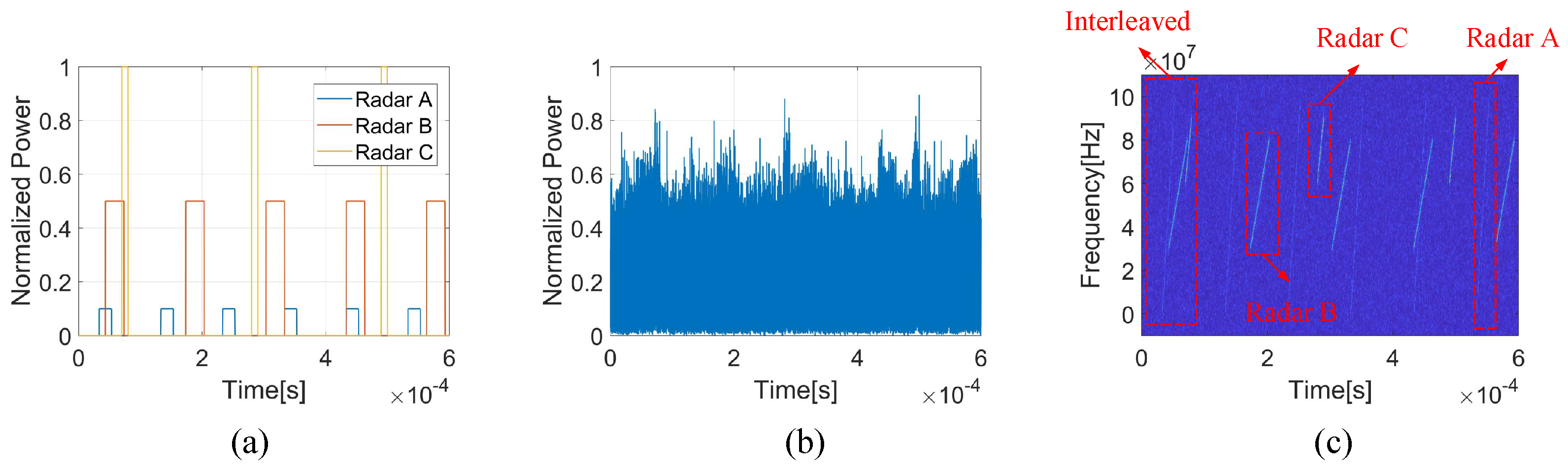
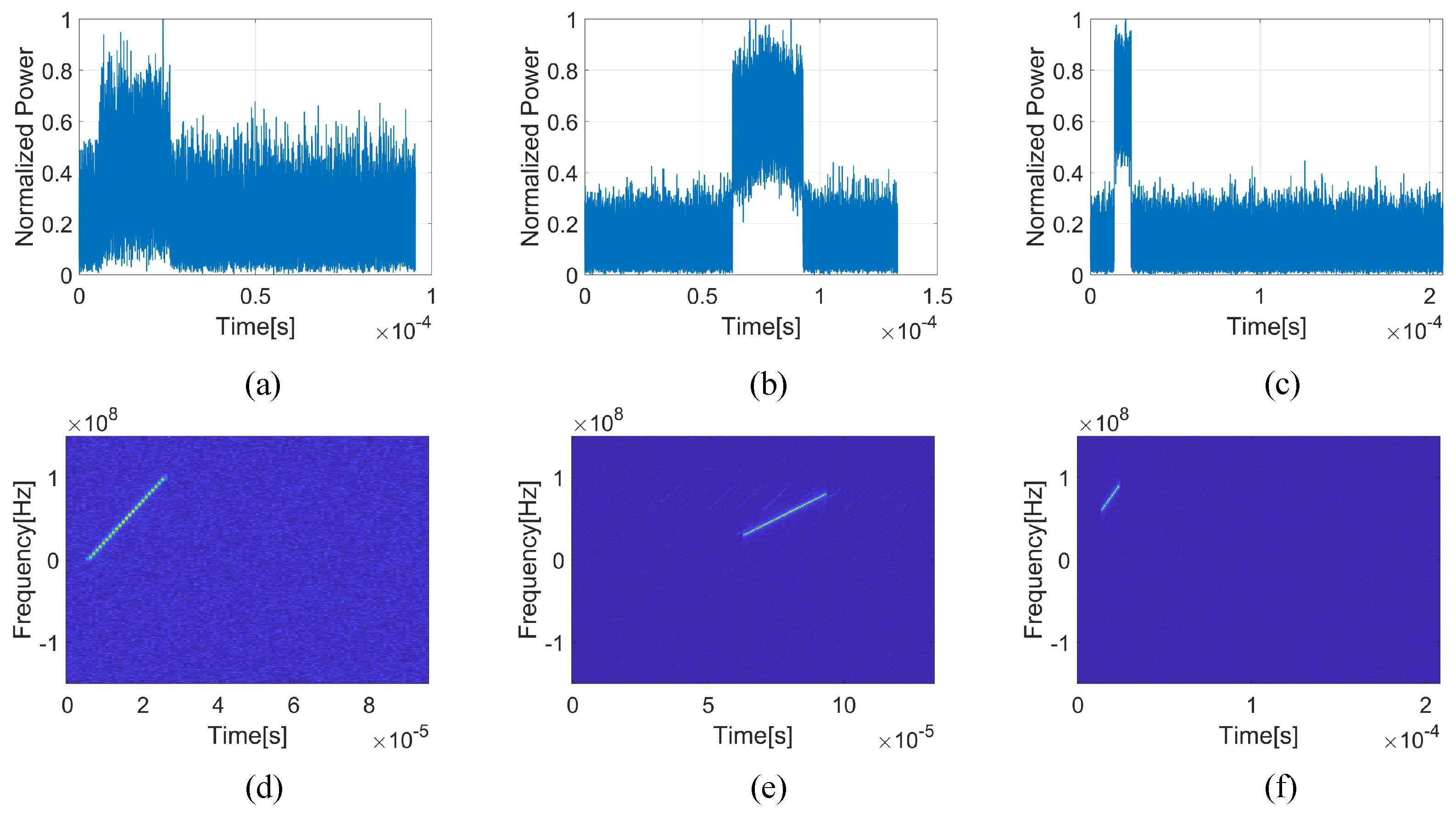
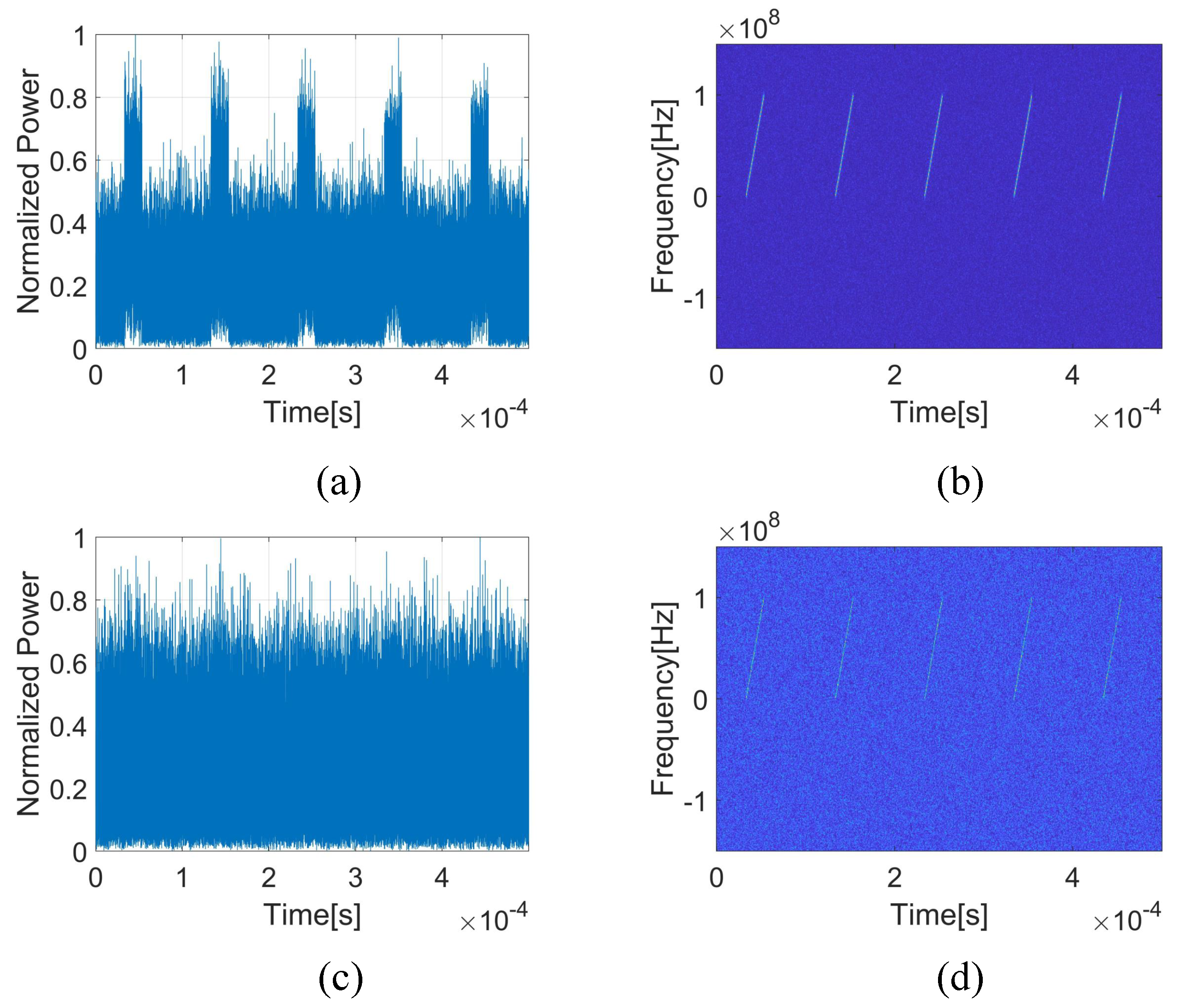
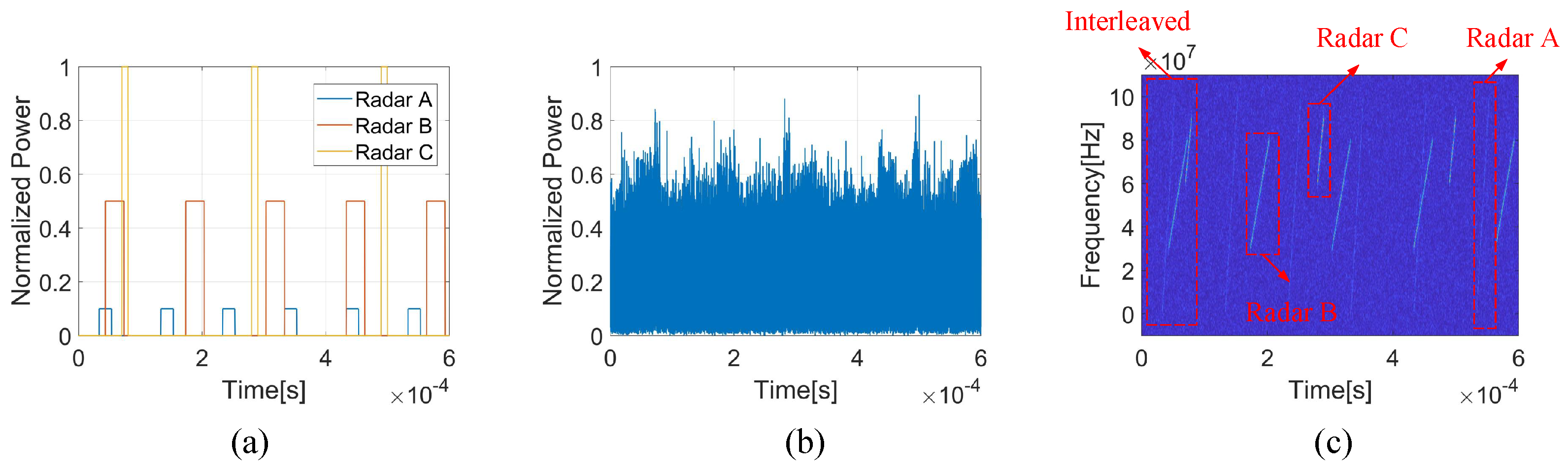
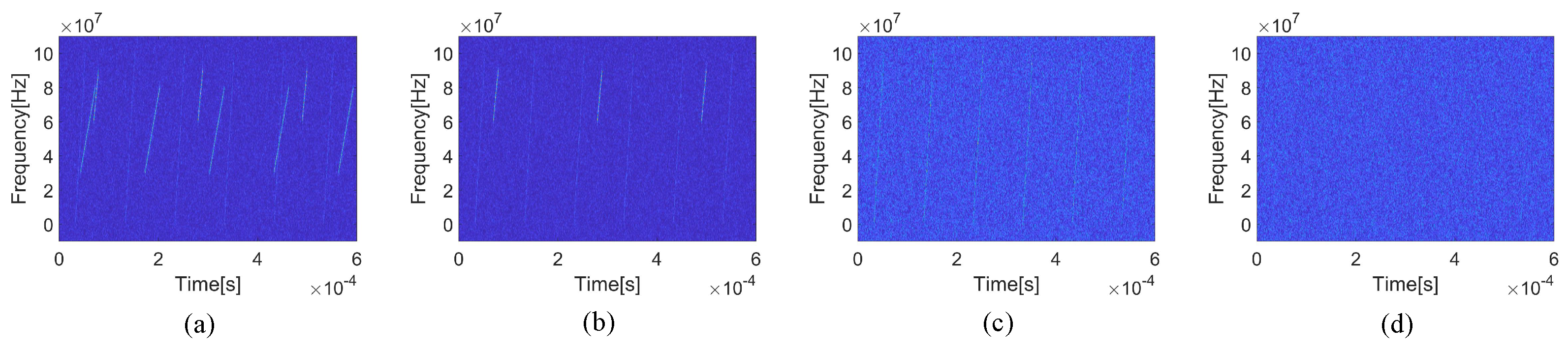
4.1. Signal Extraction for Multi-Radar Sources under Low SNR
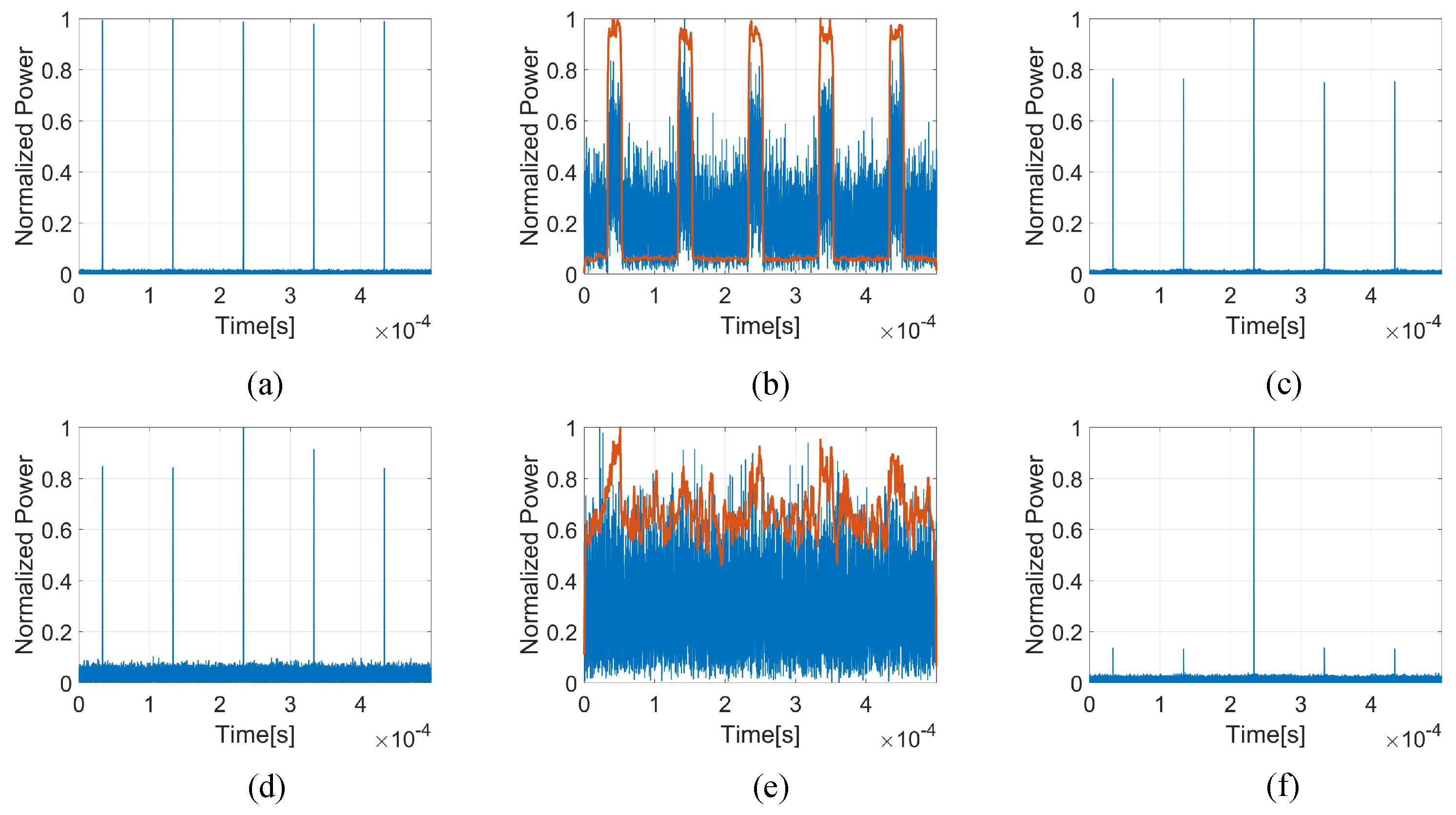
4.2. Robust Performance Compared to Conventional Algorithms
4.2.1. Signals from One Radar Source
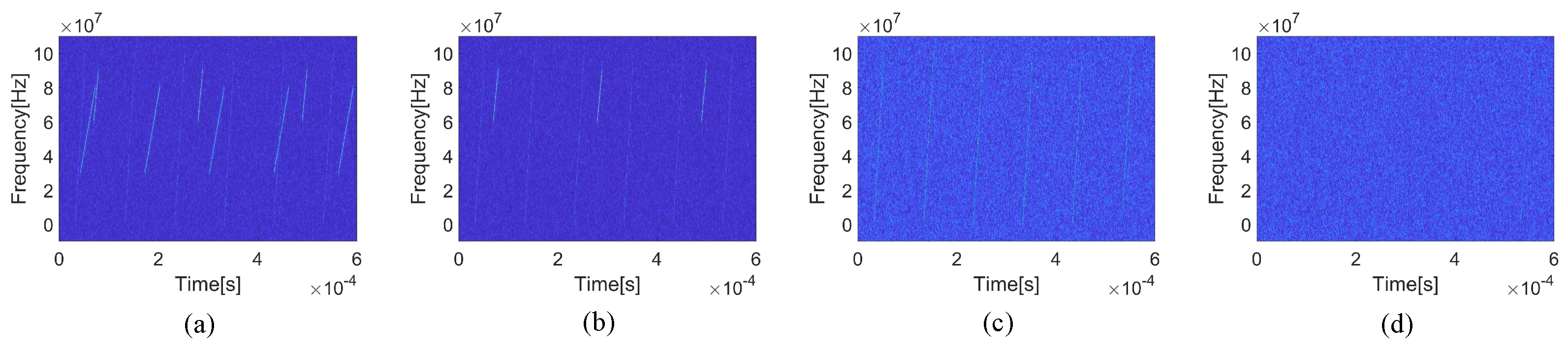
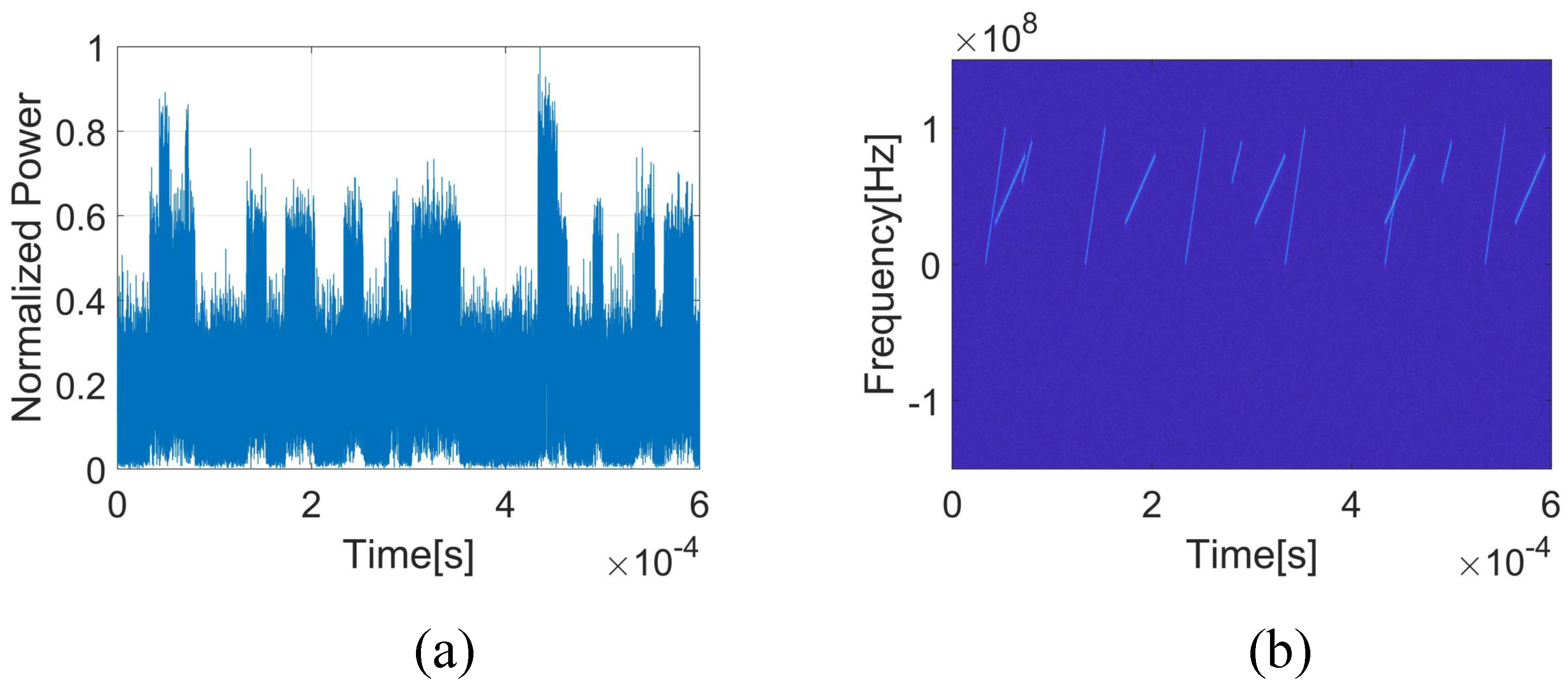
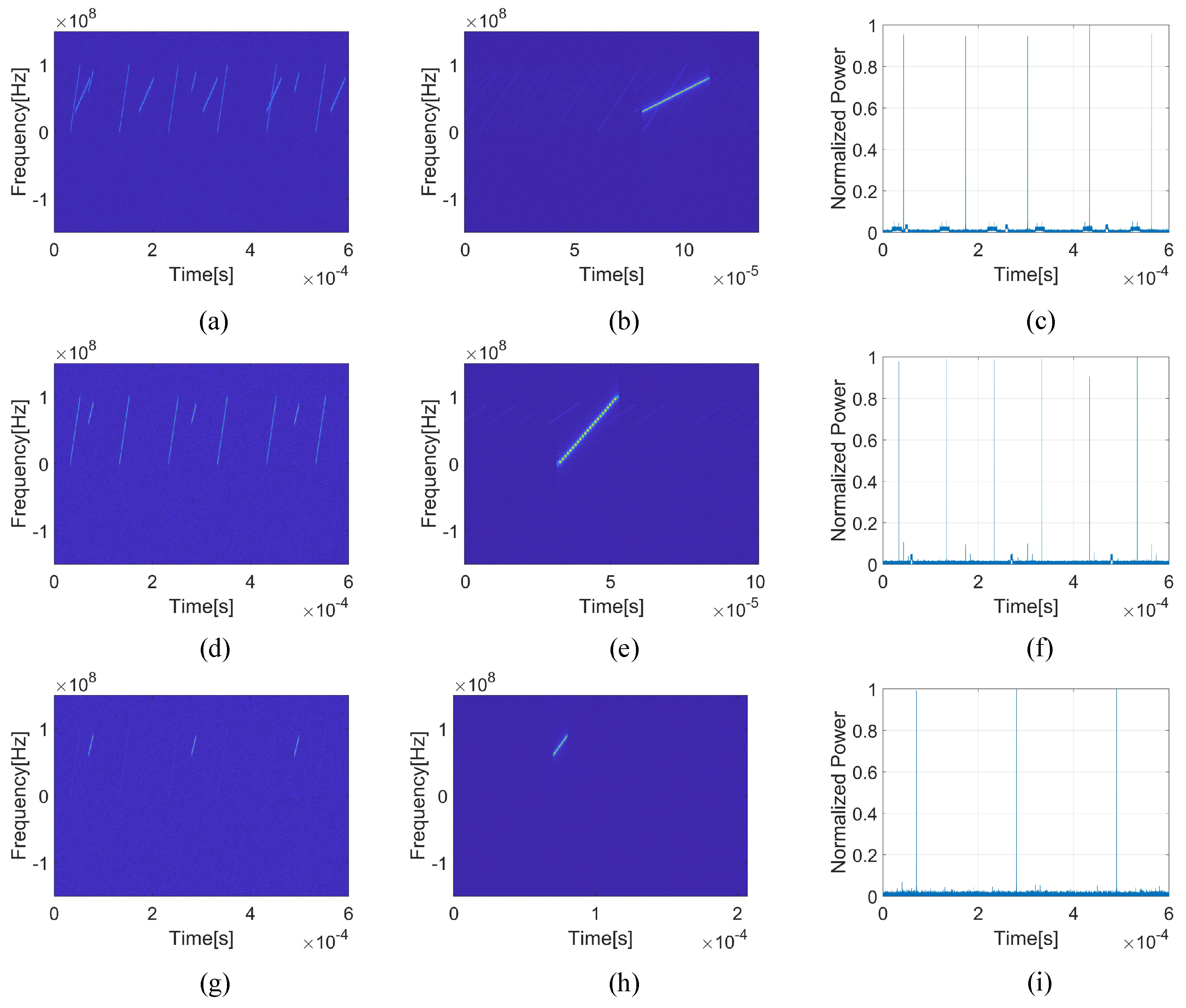
4.2.2. Signals from Multiple Radar Sources
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Schroer, R. Electronic warfare. [A century of powered flight: 1903–2003]. IEEE Aerosp. Electron. Syst. Mag. 2003, 18, 49–54. [Google Scholar] [CrossRef]
- Benren, T. An ECCM model and the technical development trends to the demands of the future EW combat. IEEE Aerosp. Electron. Syst. Mag. 1994, 9, 12–16. [Google Scholar] [CrossRef]
- Wang, G.; He, Y.; Shen, N.; Lu, D.; Yan, H. A new radar-ESM correlation algorithm in multisensor data fusion. In Proceedings of the International Radar Conference, Beijing, China, 8–10 October 1996; pp. 747–750. [Google Scholar] [CrossRef]
- Matthes, D. Convergence of ESM sensors and passive covert radar. In Proceedings of the IEEE International Radar Conference, Arlington, VA, USA, 9–12 May 2005; pp. 430–444. [Google Scholar] [CrossRef]
- Pietkiewicz, T. Fusion of Identification Information from ESM Sensors and Radars Using Dezert–Smarandache Theory Rules. Remote Sens. 2023, 15, 3977. [Google Scholar] [CrossRef]
- Zhou, S.; Zhang, Y.; Ma, H.; Peng, X.; Yang, D.; Liu, H.; Yan, J. Optimized Masking for MIMO Radar Signals. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 3433–3451. [Google Scholar] [CrossRef]
- Li, X.; Liu, Z.; Huang, Z.; Liu, W. Radar Emitter Classification with Attention-Based Multi-RNNs. IEEE Commun. Lett. 2020, 24, 2000–2004. [Google Scholar] [CrossRef]
- Xu, T.; Yuan, S.; Liu, Z.; Guo, F. Radar Emitter Recognition Based on Parameter Set Clustering and Classification. Remote Sens. 2022, 14, 4468. [Google Scholar] [CrossRef]
- Whalley, G.W. Signal processing requirements for future ESM systems. In Proceedings of the IEE Colloquium on Signal Processing for ESM Systems, London, UK, 26 April 1988; pp. 2/1–2/4. [Google Scholar]
- Wang, P. Countermeasures of command and control (C2) capabilities in a hostile environment. IEEE Aerosp. Electron. Syst. Mag. 2004, 19, 30–35. [Google Scholar] [CrossRef]
- Mosinski, J.D. Electronic countermeasures. In Proceedings of the Tactical Communications Conference, Fort Wayne, IN, USA, 28–30 April 1992; Volume 1, pp. 191–195. [Google Scholar] [CrossRef]
- Arik, M.; Akan, O.B. Enabling cognition on Electronic CounterMeasure systems against next-generation radars. In Proceedings of the MILCOM 2015—2015 IEEE Military Communications Conference, Tampa, FL, USA, 26–28 October 2015; pp. 1103–1108. [Google Scholar] [CrossRef]
- Chen, J.; Wang, F.; Zhou, J. Information-Theoretic Optimal Radar Waveform Selection with Multi-Sensor Cooperation for LPI Purpose. IEEE Access 2022, 10, 113649–113661. [Google Scholar] [CrossRef]
- Liu, X.; Yuan, Y.; Zhang, T.; Ciu, G.; Tay, W.P. LPI Radar Signal Design Resistant to Identification by ESM Systems. IEEE Trans. Aerosp. Electron. Syst. 2023, 59, 9233–9246. [Google Scholar] [CrossRef]
- Song, Y.; Wei, S.; Tian, B.; Xu, S.; Zhang, L. LPI Radar Target Detection Performance Optimization Based on Joint Cognitive Frequency Transmission and Power Allocation. Signal Process. 2023, 202, 108736. [Google Scholar] [CrossRef]
- Wang, T.; Jiang, K.; Liao, J.; Tingting, J.; Bin, T. Research on LPI radar signal detection and parameter estimation technology. J. Syst. Eng. Electron. 2021, 32, 566–572. [Google Scholar] [CrossRef]
- Song, Y.; Wang, Y.; Xie, J.; Yang, Y.; Tian, B.; Xu, S. Ultra-Low Sidelobe Waveforms Design for LPI Radar Based on Joint Complementary Phase-Coding and Optimized Discrete Frequency-Coding. Remote Sens. 2022, 14, 2592. [Google Scholar] [CrossRef]
- Liu, S.; Jin, B.; Yang, H.; Su, T. A real-time algorithm for signal detection based on autocorrelation at low SNR. In Proceedings of the IEEE 10th International Conference on Signal Processing, Beijing, China, 24–28 October 2010; pp. 2092–2095. [Google Scholar] [CrossRef]
- Wei, S.; Zhang, L.; Ma, Y.; Zhong, W. Robust Joint Accumulation and Detection for Discrete Frequency Coded Waveform Signals at Low Signal-to-Noise Ratio. J. Electron. Inf. Technol. 2023, 45, 977–986. [Google Scholar] [CrossRef]
- Cohen, L. Time-Frequency Distributions—A Review. Proc. IEEE 1989, 77, 941–981. [Google Scholar] [CrossRef]
- Stanković, L.; Stanković, S.; Daković, M. From the STFT to the Wigner Distribution. IEEE Signal Process. Mag. 2014, 31, 163–174. [Google Scholar] [CrossRef]
- Kootsookos, P.J.; Lovell, B.C.; Boashas, B. A unified approach to the STFT, TFD’s, and instantaneous frequency. IEEE Trans. Signal Process. 1992, 40, 1971–1982. [Google Scholar] [CrossRef]
- Ivanovic, V.; Dakovic, M.; Djurovic, I.; Stankovic, L. Instantaneous frequency estimation by using time-frequency distributions. In Proceedings of the 2001 IEEE International Conference on Acoustics, Speech, and Signal Processing (ICASSP), Salt Lake City, UT, USA, 7–11 May 2001; pp. 3521–3524. [Google Scholar] [CrossRef]
- Park, D.-H.; Jeon, M.-W.; Shin, D.-M.; Kim, H.-N. LPI Radar Detection Based on Deep Learning Approach with Periodic Autocorrelation Function. Sensors 2023, 23, 8564. [Google Scholar] [CrossRef]
- Wei, S.; Zhang, M.; Wang, G.; Sun, X.; Zhang, L.; Chen, D. Robust Multi-Frame Joint Frequency Hopping Radar Waveform Parameters Estimation under Low Signal-Noise-Ratio. IEEE Access 2019, 7, 177198–177210. [Google Scholar] [CrossRef]
- Ray, P.S. A novel pulse TOA analysis technique for radar identification. IEEE Trans. Aerosp. Electron. Syst. 1998, 34, 716–721. [Google Scholar] [CrossRef]
- Hassan, H.E. Deinterleaving of radar pulses in a dense emitter environment. In Proceedings of the 2003 International Conference on Radar (IEEE Cat. No.03EX695), Adelaide, Australia, 3–5 September 2003; pp. 389–393. [Google Scholar] [CrossRef]
- Moore, J.B.; Krishnamurthy, V. Deinterleaving pulse trains using discrete-time stochastic dynamic-linear models. IEEE Trans. Signal Process. 1994, 42, 3092–3103. [Google Scholar] [CrossRef]
- Ge, Z.; Sun, X.; Ren, W.; Chen, W.; Xu, G. Improved Algorithm of Radar Pulse Repetition Interval Deinterleaving Based on Pulse Correlation. IEEE Access 2019, 7, 30126–30134. [Google Scholar] [CrossRef]
- Liu, Z.-M. Online Pulse Deinterleaving with Finite Automata. IEEE Trans. Aerosp. Electron. Syst. 2020, 56, 1139–1147. [Google Scholar] [CrossRef]
- Conroy, T.; Moore, J.B. The limits of extended Kalman filtering for pulse train deinterleaving. IEEE Trans. Signal Process. 1998, 46, 3326–3332. [Google Scholar] [CrossRef]
- Mardia, H.K. New techniques for the deinterleaving of repetitive sequences. IEE Proc. F Radar Signal Process. 1989, 136, 149–154. [Google Scholar] [CrossRef]
- Milojevic, D.J.; Popovic, B.M. Improved algorithm for the deinterleaving of radar pulses. IEE Proc. F Radar Signal Process. 1992, 139, 98–104. [Google Scholar] [CrossRef]
- Xi, Y.; Wu, Y.; Wu, X.; Jiang, K. An improved SDIF algorithm for anti-radiation radar using dynamic sequence search. In Proceedings of the 2017 36th Chinese Control Conference (CCC), Dalian, China, 26–28 July 2017; pp. 5596–5601. [Google Scholar] [CrossRef]
- Liu, Z.-M.; Yu, P.S. Classification, Denoising, and Deinterleaving of Pulse Streams with Recurrent Neural Networks. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 1624–1639. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the ICNN’95—International Conference on Neural Networks, Perth, Australia, 27 November–1 December 1995; Volume 4, pp. 1942–1948. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Sampling Frequency | 300 MHz |
| Radar A | |
| Pulse Repetition Time | 100 µs |
| Pulse Width | 20 µs |
| Center Frequency | 50 MHz |
| Band Width | 100 MHz |
| Signal Modulation | LFM |
| SNR | dB |
| Radar B | |
| Pulse Repetition Time | 130 µs |
| Pulse Width | 30 µs |
| Center Frequency | 55 MHz |
| Band Width | 50 MHz |
| Signal Modulation | LFM |
| SNR | dB |
| Radar C | |
| Pulse Repetition Time | 210 µs |
| Pulse Width | 10 µs |
| Center Frequency | 75 MHz |
| Band Width | 30 MHz |
| Signal Modulation | LFM |
| SNR | 0 dB |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wei, S.; Fang, Y.; He, C.; Zhang, L. High-Quality Radar Pulse Signal Acquisition and Deinterleaving under a Low Signal-to-Noise Ratio with Multi-Layer Particle Swarm Optimization. Remote Sens. 2024, 16, 537. https://doi.org/10.3390/rs16030537
Wei S, Fang Y, He C, Zhang L. High-Quality Radar Pulse Signal Acquisition and Deinterleaving under a Low Signal-to-Noise Ratio with Multi-Layer Particle Swarm Optimization. Remote Sensing. 2024; 16(3):537. https://doi.org/10.3390/rs16030537
Chicago/Turabian StyleWei, Song, Yuyuan Fang, Chao He, and Lei Zhang. 2024. "High-Quality Radar Pulse Signal Acquisition and Deinterleaving under a Low Signal-to-Noise Ratio with Multi-Layer Particle Swarm Optimization" Remote Sensing 16, no. 3: 537. https://doi.org/10.3390/rs16030537
APA StyleWei, S., Fang, Y., He, C., & Zhang, L. (2024). High-Quality Radar Pulse Signal Acquisition and Deinterleaving under a Low Signal-to-Noise Ratio with Multi-Layer Particle Swarm Optimization. Remote Sensing, 16(3), 537. https://doi.org/10.3390/rs16030537