
Assessment Accuracy of Standard Point Positioning Enhanced by Observation and Position Domain Filtering Utilizing a Multi-Epoch Least-Squares Integration Method

 ,
, 
Abstract
1. Introduction
2. The GNSS Positioning Observation Model
3. The Mathematical Model for Integrating Positioning and the Increment
4. Experimental Study and Analysis
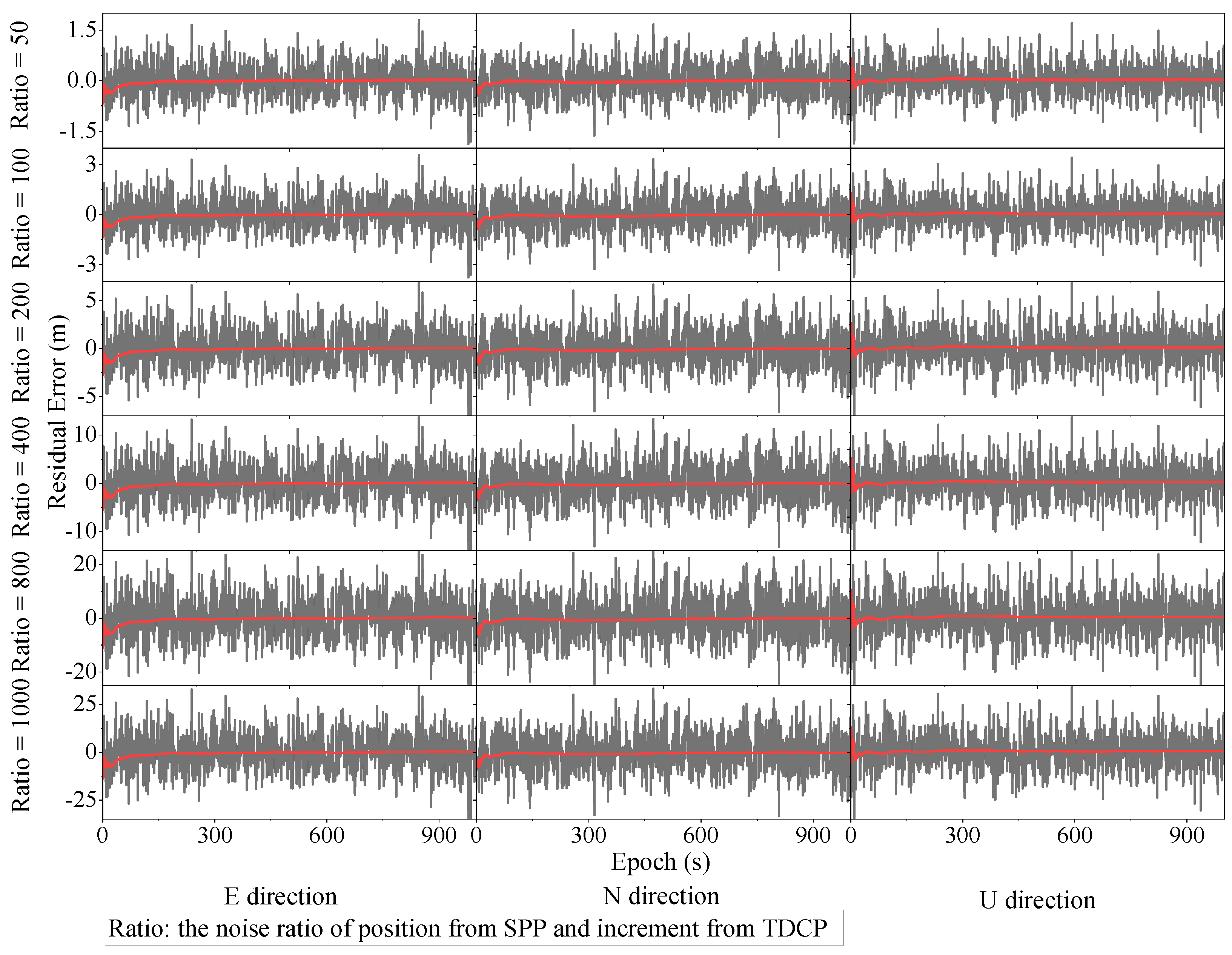
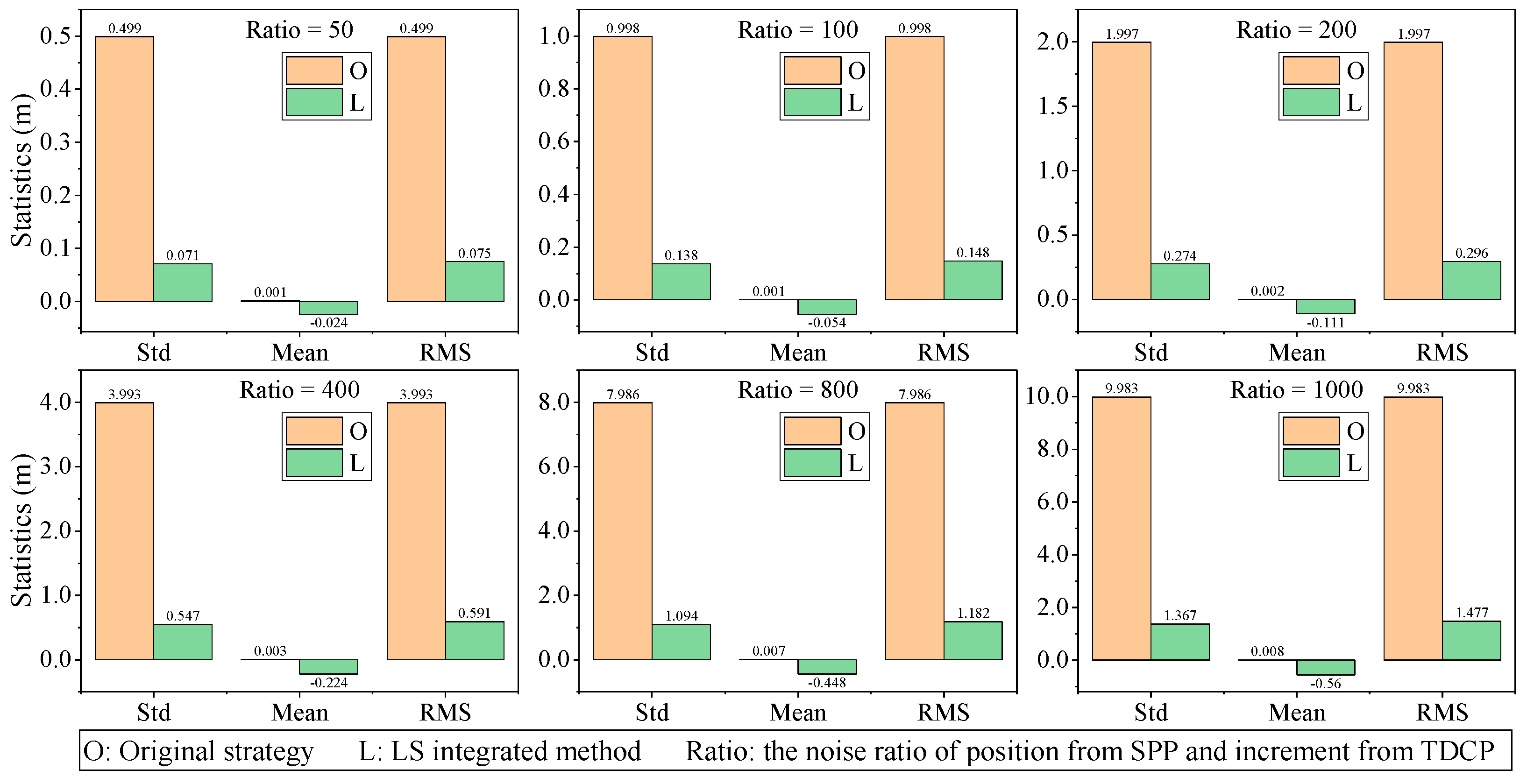
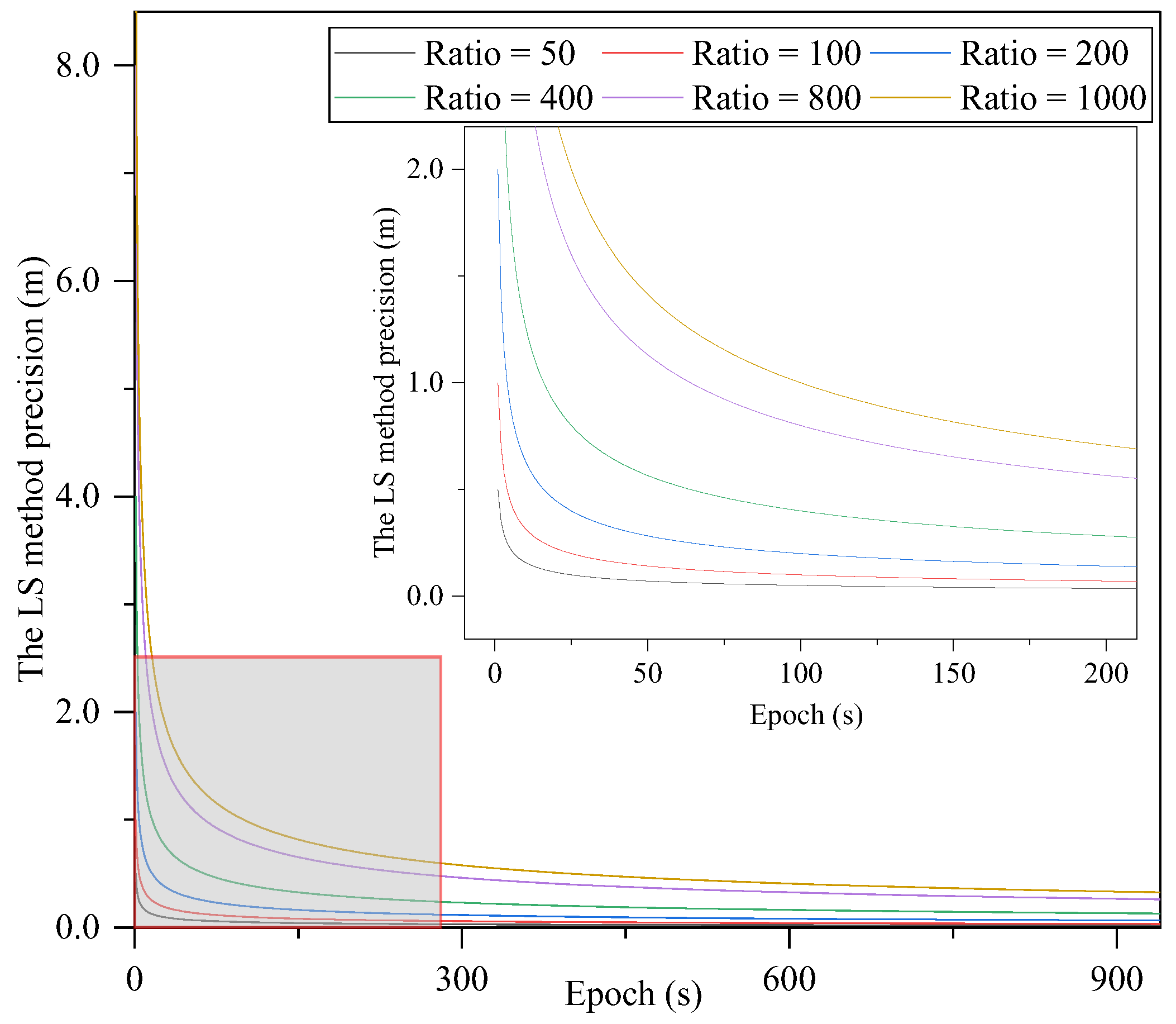
4.1. Simulation Dataset Test
4.1.1. Dataset Description
4.1.2. Experimental Analysis
4.2. Real Measured GNSS Dataset Study under an Open Environment
4.2.1. GNSS Dataset Processing Model
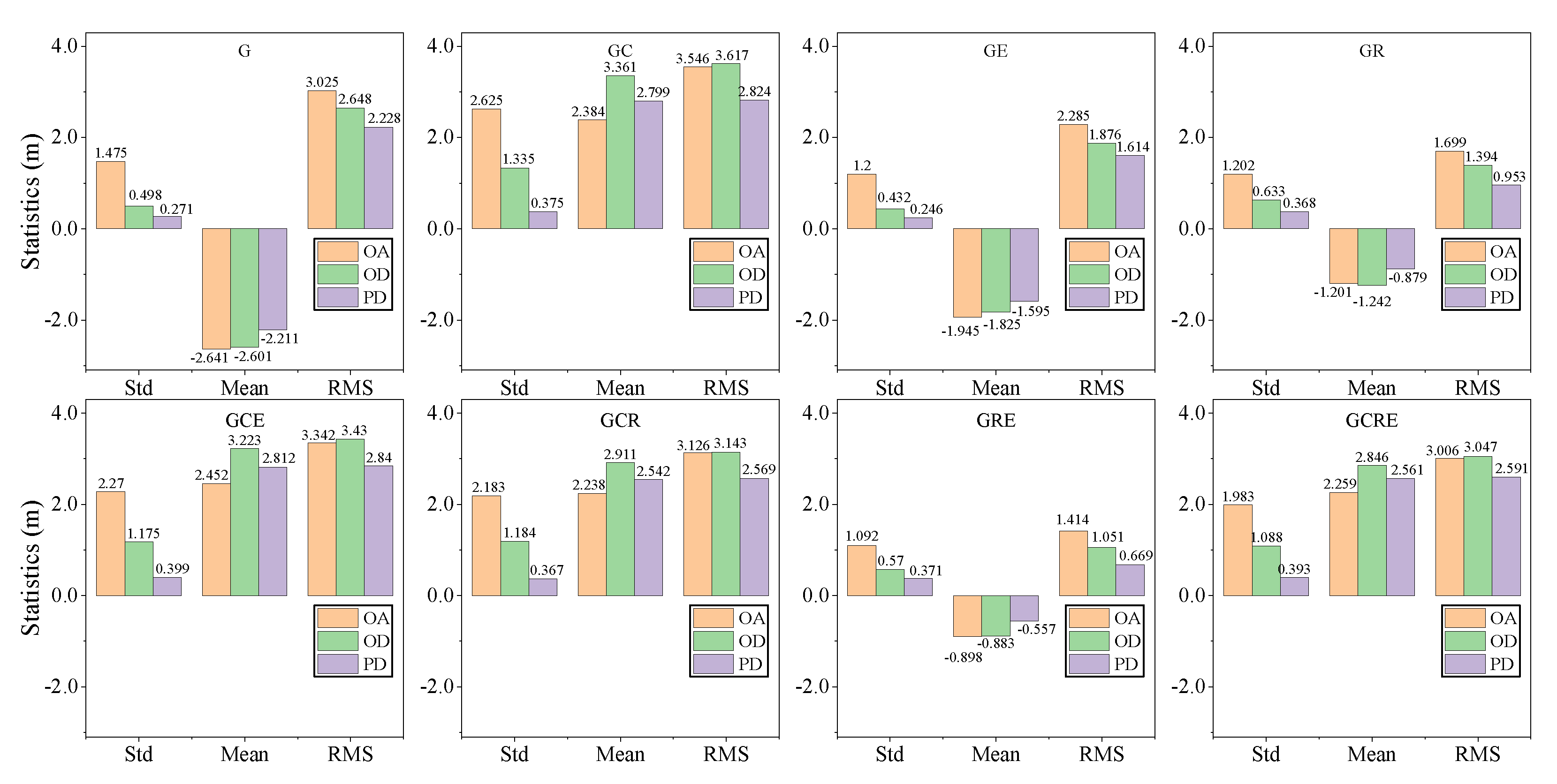
4.2.2. Performance Comparison of Observation and Position Domain Filtering Method
4.2.3. Performance Comparison of MELS Based on the Position Domain Filtering Method
4.3. Real Measured GNSS Dataset Study under Forest Scene
4.3.1. Dataset Description
4.3.2. Performance Comparison of Observation and Position Domain Filtering Method
4.3.3. Performance Comparison of MELS Based on the Position Domain Filtering Method
5. Conclusion and Future Work
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Lee, T.; Bettinger, P.; Merry, K.; Cieszewski, C. The effects of nearby trees on the positional accuracy of gnss receivers in a forest environment. PLoS ONE 2023, 18, e0283090. [Google Scholar] [CrossRef]
- Feng, T.; Chen, S.; Feng, Z.; Shen, C.; Tian, Y. Effects of canopy and multi-epoch observations on single-point positioning errors of a gnss in coniferous and broadleaved forests. Remote Sens. 2021, 13, 2325. [Google Scholar] [CrossRef]
- Guo, J.; Hou, R.; Zhou, M.; Jin, X.; Li, C.; Liu, X.; Gao, H. Monitoring 2019 forest fires in southeastern australia with gnss technique. Remote Sens. 2021, 13, 386. [Google Scholar] [CrossRef]
- Garrido-Carretero, M.S.; Azorit, C.; de Lacy-Pérez de los Cobos, M.C.; Valderrama-Zafra, J.M.; Carrasco, R.; Gil-Cruz, A.J. Improving the precision and accuracy of wildlife monitoring with multi-constellation, multi-frequency gnss collars. J. Wildl. Manag. 2023, 87, e22378. [Google Scholar] [CrossRef]
- Kaartinen, H.; Hyyppä, J.; Vastaranta, M.; Kukko, A.; Jaakkola, A.; Yu, X.; Pyörälä, J.; Liang, X.; Liu, J.; Wang, Y.; et al. Accuracy of kinematic positioning using global satellite navigation systems under forest canopies. Forests 2015, 6, 3218–3236. [Google Scholar] [CrossRef]
- Konakoglu, B.; Yilmaz, V. Evaluating the performance of the static ppp-ar in a forest environment. J. Surv. Eng. 2024, 150, 05023006. [Google Scholar] [CrossRef]
- Wang, A.; Zhang, Y.; Chen, J.; Wang, H. Improving the (re-)convergence of multi-gnss real-time precise point positioning through regional between-satellite single-differenced ionospheric augmentation. GPS Solut. 2022, 26, 39. [Google Scholar] [CrossRef]
- Quddus, M.A.; Ochieng, W.Y.; Noland, R.B. Current map-matching algorithms for transport applications: State-of-the art and future research directions. Transp. Res. Part C Emerg. Technol. 2007, 15, 312–328. [Google Scholar] [CrossRef]
- Grewal, M.S.; Andrews, A.P.; Bartone, C.G. Global Navigation Satellite Systems, Inertial Navigation, and Integration; John Wiley & Sons: New York, NY, USA, 2020. [Google Scholar]
- Zumberge, J.; Heflin, M.; Jefferson, D.; Watkins, M.; Webb, F. Precise point positioning for the efficient and robust analysis of gps data from large networks. J. Geophys. Res. Solid Earth 1997, 102, 5005–5017. [Google Scholar] [CrossRef]
- Lee, H.K.; Rizos, C.; Jee, G.-I. Position domain filtering and range domain filtering for carrier-smoothed-code dgnss: An analytical comparison. IEE Proc. -Radar Sonar Navig. 2005, 152, 271–276. [Google Scholar] [CrossRef]
- Li, F.; Gao, J.; Zheng, N.; Pan, C.; Zhao, L. A novel dual-domain filtering method to improve gnss performance based on a dynamic model constructed by tdcp. IEEE Access 2020, 8, 79716–79723. [Google Scholar] [CrossRef]
- Hatch, R. The synergy of gps code and carrier measurements. In 3rd International Geodetic Symposium on Satellite Doppler Positioning; Physical Sciences Laboratory of New Mexico State University: Las Cruces, NM, USA, 1982; pp. 1213–1231. [Google Scholar]
- Hwang, P.Y.; McGraw, G.A.; Bader, J.R. Enhanced differential gps carrier-smoothed code processing using dual-frequency measurements. Navigation 1999, 46, 127–137. [Google Scholar] [CrossRef]
- Tang, W.; Cui, J.; Hui, M.; Deng, C. Performance analysis for bds phase-smoothed pseudorange differential positioning. J. Navig. 2016, 69, 1011–1023. [Google Scholar] [CrossRef]
- Kim, D.; Langley, R.B. The multipath divergence problem in gps carrier-smoothed code pseudorange. In Proceedings of the 47th Annual Conference of the Canadian Aeronautics and Space Institute, Ottawa, ON, Canada, 30 April–3 May 2000; pp. 161–163. [Google Scholar]
- Song, J.; Milner, C. Impact of multipath on code-carrier divergence monitor and threat space analysis for dual-frequency gbas. In Proceedings of the IEEE/ION PLANS 2020, Portland, OR, USA, 20–23 April 2020. [Google Scholar]
- Lee, H.K.; Rizos, C.; Jee, I. Design and analysis of dgps filters with consistent error covariance information. In Proceedings of the 6th International Symposium on Satellite Navigation Technology Including Mobile Positioning and Location Services, Melbourne, Australia, 22–25 July 2023; pp. 22–25. [Google Scholar]
- Mcgraw, G. Generalized divergence-free carrier smoothing with applications to dual frequency differential gps. Navigation 2009, 56, 115–122. [Google Scholar] [CrossRef]
- Closas, P.; Fernández-Prades, C.; Fernández-Rubio, J.A. Maximum likelihood estimation of position in gnss. IEEE Signal Process. Lett. 2007, 14, 359–362. [Google Scholar] [CrossRef]
- Closas, P.; Gusi-Amigo, A. Direct position estimation of gnss receivers: Analyzing main results, architectures, enhancements, and challenges. IEEE Signal Process. Mag. 2017, 34, 72–84. [Google Scholar] [CrossRef]
- Vincent, F.; Chaumette, E.; Charbonnieras, C.; Israel, J.; Aubault, M.; Barbiero, F. Asymptotically efficient gnss trilateration. Signal Process. 2017, 133, 270–277. [Google Scholar] [CrossRef]
- Qian, N.; Chang, G.; Gao, J. Gnss pseudorange and time-differenced carrier phase measurements least-squares fusion algorithm and steady performance theoretical analysis. Electron. Lett. 2019, 55, 1238–1241. [Google Scholar] [CrossRef]
- Li, F.; Gao, J.; Psimoulis, P.; Meng, X.; Ke, F. A novel dynamical filter based on multi-epochs least-squares to integrate the carrier phase and pseudorange observation for gnss measurement. Remote Sens. 2020, 12, 1762. [Google Scholar] [CrossRef]
- Parkinson, B.W.; Enge, P.; Axelrad, P.; Spilker, J.J., Jr. Global Positioning System: Theory and Applications, Volume ii; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 1996. [Google Scholar]
- Singer, R.A. Estimating optimal tracking filter performance for manned maneuvering targets. IEEE Trans. Aerosp. Electron. Syst. 1970, AES-6, 473–483. [Google Scholar] [CrossRef]
- Lagakos, S.W.; Sommer, C.J.; Zelen, M. Semi-markov models for partially censored data. Biometrika 1978, 65, 311–317. [Google Scholar] [CrossRef]
- Zhou, H.; Kumar, K. A current statistical model and adaptive algorithm for estimating maneuvering targets. J. Guid. Control Dyn. 1984, 7, 596–602. [Google Scholar] [CrossRef]
- Moose, R. An adaptive state estimation solution to the maneuvering target problem. IEEE Trans. Autom. Control 1975, 20, 359–362. [Google Scholar] [CrossRef]
- Helferty, J.P. Improved tracking of maneuvering targets: The use of turn-rate distributions for acceleration modeling. IEEE Trans. Aerosp. Electron. Syst. 1996, 32, 1355–1361. [Google Scholar] [CrossRef]
- Zhou, Z.; Li, B. Gnss windowing navigation with adaptively constructed dynamic model. GPS Solut. 2015, 19, 37–48. [Google Scholar] [CrossRef]
- Geng, J.; Pan, Y.; Li, X.; Guo, J.; Liu, J.; Chen, X.; Zhang, Y. Noise characteristics of high-rate multi-gnss for subdaily crustal deformation monitoring. J. Geophys. Res. Solid Earth 2018, 123, 1987–2002. [Google Scholar] [CrossRef]
- Li, W.; Li, Z.; Jiang, W.; Chen, Q.; Zhu, G.; Wang, J. A new spatial filtering algorithm for noisy and missing gnss position time series using weighted expectation maximization principal component analysis: A case study for regional gnss network in xinjiang province. Remote Sens. 2022, 14, 1295. [Google Scholar] [CrossRef]
- Wang, M.; Wang, J.; Dong, D.; Chen, W.; Li, H.; Wang, Z. Advanced sidereal filtering for mitigating multipath effects in gnss short baseline positioning. ISPRS Int. J. Geo-Inf. 2018, 7, 228. [Google Scholar] [CrossRef]
- Petovello, M.G.; O’Keefe, K.; Lachapelle, G.; Cannon, M.E. Consideration of time-correlated errors in a kalman filter applicable to gnss. J. Geod. 2009, 83, 51–56. [Google Scholar] [CrossRef]
- Won, J.-H.; Dötterböck, D.; Eissfeller, B. Performance comparison of different forms of kalman filter approaches for a vector-based gnss signal tracking loop. Navigation 2010, 57, 185–199. [Google Scholar] [CrossRef]
- D’Angelo, G.; Piersanti, M.; Pignalberi, A.; Coco, I.; De Michelis, P.; Tozzi, R.; Pezzopane, M.; Alfonsi, L.; Cilliers, P.; Ubertini, P. Investigation of the physical processes involved in gnss amplitude scintillations at high latitude: A case study. Remote Sens. 2021, 13, 2493. [Google Scholar] [CrossRef]
- Itoh, Y.; Aoki, Y. On the performance of position-domain sidereal filter for 30-s kinematic gps to mitigate multipath errors. Earth Planets Space 2022, 74, 23. [Google Scholar] [CrossRef]
- Zhang, M.W.; Peng, Z.K.; Dong, X.J.; Zhang, W.M.; Meng, G. Location identification of nonlinearities in mdof systems through order determination of state-space models. Nonlinear Dyn. 2016, 84, 1837–1852. [Google Scholar] [CrossRef]
- Atkins, C.; Ziebart, M. Effectiveness of observation-domain sidereal filtering for gps precise point positioning. GPS Solut. 2016, 20, 111–122. [Google Scholar] [CrossRef]
- Tao, Y.; Liu, C.; Chen, T.; Zhao, X.; Liu, C.; Hu, H.; Zhou, T.; Xin, H. Real-time multipath mitigation in multi-gnss short baseline positioning via cnn-lstm method. Math. Probl. Eng. 2021, 2021, 6573230. [Google Scholar] [CrossRef]
- Ma, X.; Wang, Q.; Yu, K.; He, X.; Zhao, L. Research on blunder detection methods of pseudorange observation in gnss observation domain. Remote Sens. 2022, 14, 5286. [Google Scholar] [CrossRef]
- Asaad, S.M.; Potrus, M.Y.; Ghafoor, K.Z.; Maghdid, H.S.; Mulahuwaish, A. Improving positioning accuracy using optimization approaches: A survey, research challenges and future perspectives. Wirel. Pers. Commun. 2022, 122, 3393–3409. [Google Scholar] [CrossRef]
- Shokri, S.; Rahemi, N.; Mosavi, M.R. Improving gps positioning accuracy using weighted kalman filter and variance estimation methods. CEAS Aeronaut. J. 2020, 11, 515–527. [Google Scholar] [CrossRef]
- Revach, G.; Shlezinger, N.; Ni, X.; Escoriza, A.L.; Sloun, R.J.G.v.; Eldar, Y.C. Kalmannet: Neural network aided kalman filtering for partially known dynamics. IEEE Trans. Signal Process. 2022, 70, 1532–1547. [Google Scholar] [CrossRef]
- Freda, P.; Angrisano, A.; Gaglione, S.; Troisi, S. Time-differenced carrier phases technique for precise gnss velocity estimation. GPS Solut. 2015, 19, 335–341. [Google Scholar] [CrossRef]
- Jin, S.; Luo, O.; Park, P. Gps observations of the ionospheric f2-layer behavior during the 20th november 2003 geomagnetic storm over south korea. J. Geod. 2008, 82, 883–892. [Google Scholar] [CrossRef]
- Blewitt, G. An automatic editing algorithm for gps data. Geophys. Res. Lett. 1990, 17, 199–202. [Google Scholar] [CrossRef]
- Zhao, D.; Roberts, G.W.; Hancock, C.M.; Lau, L.; Bai, R. A triple-frequency cycle slip detection and correction method based on modified hmw combinations applied on gps and bds. GPS Solut. 2019, 23, 22. [Google Scholar] [CrossRef]
- Li, F.; Gao, J.; Li, Z.; Qian, N.; Yang, L.; Yao, Y. A step cycle slip detection and repair method based on double-constraint of ephemeris and smoothed pseudorange. Acta Geodyn. Et Geomater. 2019, 16, 337–348. [Google Scholar] [CrossRef]
- Li, B.; Lou, L.; Shen, Y. Gnss elevation-dependent stochastic modeling and its impacts on the statistic testing. J. Surv. Eng. 2016, 142, 04015012. [Google Scholar] [CrossRef]
- Saastamoinen, J. Atmospheric correction for the troposphere and stratosphere in radio ranging satellites. Use Artif. Satell. Geod. 1972, 15, 247–251. [Google Scholar]
- Kouba, J. A Guide to Using International Gnss Service (igs) Products. 2009. Available online: http://acc.igs.org/UsingIGSProductsVer21.pdf (accessed on 27 January 2023).
- Wu, J.-T.; Wu, S.C.; Hajj, G.A.; Bertiger, W.I.; Lichten, S.M. Effects of antenna orientation on gps carrier phase. Manuscripta Geod. 1993, 18, 91–98. [Google Scholar]
- Petit, G.; Luzum, B. Iers Conventions (2010); Verlag des Bundesamts für Kartographie und Geodäsie: Frankfurt am Main, Germany, 2010. [Google Scholar]
- Bahadur, B.; Nohutcu, M. Ppph: A matlab-based software for multi-gnss precise point positioning analysis. GPS Solut. 2018, 22, 113. [Google Scholar] [CrossRef]
- Xue, C.; Psimoulis, P.A.; Meng, X. Feasibility analysis of the performance of low-cost gnss receivers in monitoring dynamic motion. Measurement 2022, 202, 111819. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | Processing Methods/Strategies | |
|---|---|---|
| Data Processing Model | Double Difference Model | Standard Point Positioning Model |
| GNSS System | GPS/BDS-3/BDS-2/GLONASS/GALILEO | GPS/BDS-3/BDS-2/GLONASS/GALILEO |
| Observation type | Ionosphere-free (IF) model | Ionosphere-free (IF) model |
| Combination model | LC/PC ionospheric combination | LC/PC ionospheric combination |
| Stochastic Model | Elevation angle | Elevation angle |
| Parameter estimation method | Kalman filtering | Least square |
| Orbit and clock offset | Broadcast ephemeris | Broadcast ephemeris |
| Coordinate frame | ITRF14 | ITRF14 |
| Antenna parameters of receiver and satellite | igs14.atx (GPS parameters for the uncalibrated frequencies) | igs14.atx (GPS parameters for the uncalibrated frequencies) |
| Data sampling interval | 1 s | 1 s |
| Cut-off satellite elevation angle | 10° | 10° |
| Tropospheric delay | Saastamoinen model [52] | Saastamoinen model [52] |
| Relativistic effect | Model [53] | Model [53] |
| Antenna phase winding | Model [54] | Model [54] |
| Station displacement | Solid tides and ocean tides [55] | Solid tides and ocean tides [55] |
| Estimating parameter | Baseline Vector | Position and clock offset |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, F.; Psimoulis, P.; Li, Q.; Yang, J.; Gao, J.; Kou, X.; Niu, L.; Meng, X. Assessment Accuracy of Standard Point Positioning Enhanced by Observation and Position Domain Filtering Utilizing a Multi-Epoch Least-Squares Integration Method. Remote Sens. 2024, 16, 517. https://doi.org/10.3390/rs16030517
Li F, Psimoulis P, Li Q, Yang J, Gao J, Kou X, Niu L, Meng X. Assessment Accuracy of Standard Point Positioning Enhanced by Observation and Position Domain Filtering Utilizing a Multi-Epoch Least-Squares Integration Method. Remote Sensing. 2024; 16(3):517. https://doi.org/10.3390/rs16030517
Chicago/Turabian StyleLi, Fangchao, Panos Psimoulis, Qi Li, Jie Yang, Jingxiang Gao, Xiaomei Kou, Le Niu, and Xiaolin Meng. 2024. "Assessment Accuracy of Standard Point Positioning Enhanced by Observation and Position Domain Filtering Utilizing a Multi-Epoch Least-Squares Integration Method" Remote Sensing 16, no. 3: 517. https://doi.org/10.3390/rs16030517
APA StyleLi, F., Psimoulis, P., Li, Q., Yang, J., Gao, J., Kou, X., Niu, L., & Meng, X. (2024). Assessment Accuracy of Standard Point Positioning Enhanced by Observation and Position Domain Filtering Utilizing a Multi-Epoch Least-Squares Integration Method. Remote Sensing, 16(3), 517. https://doi.org/10.3390/rs16030517