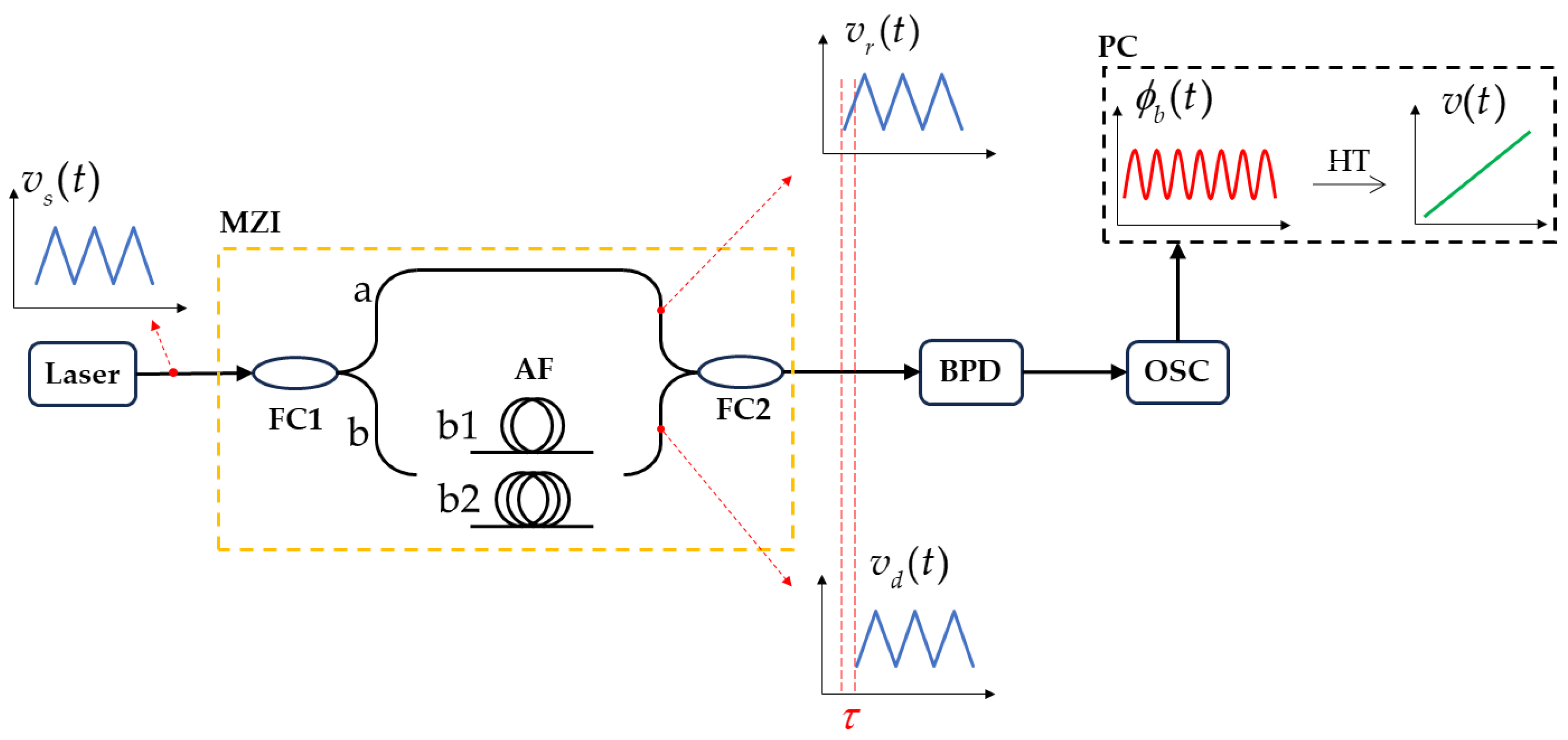
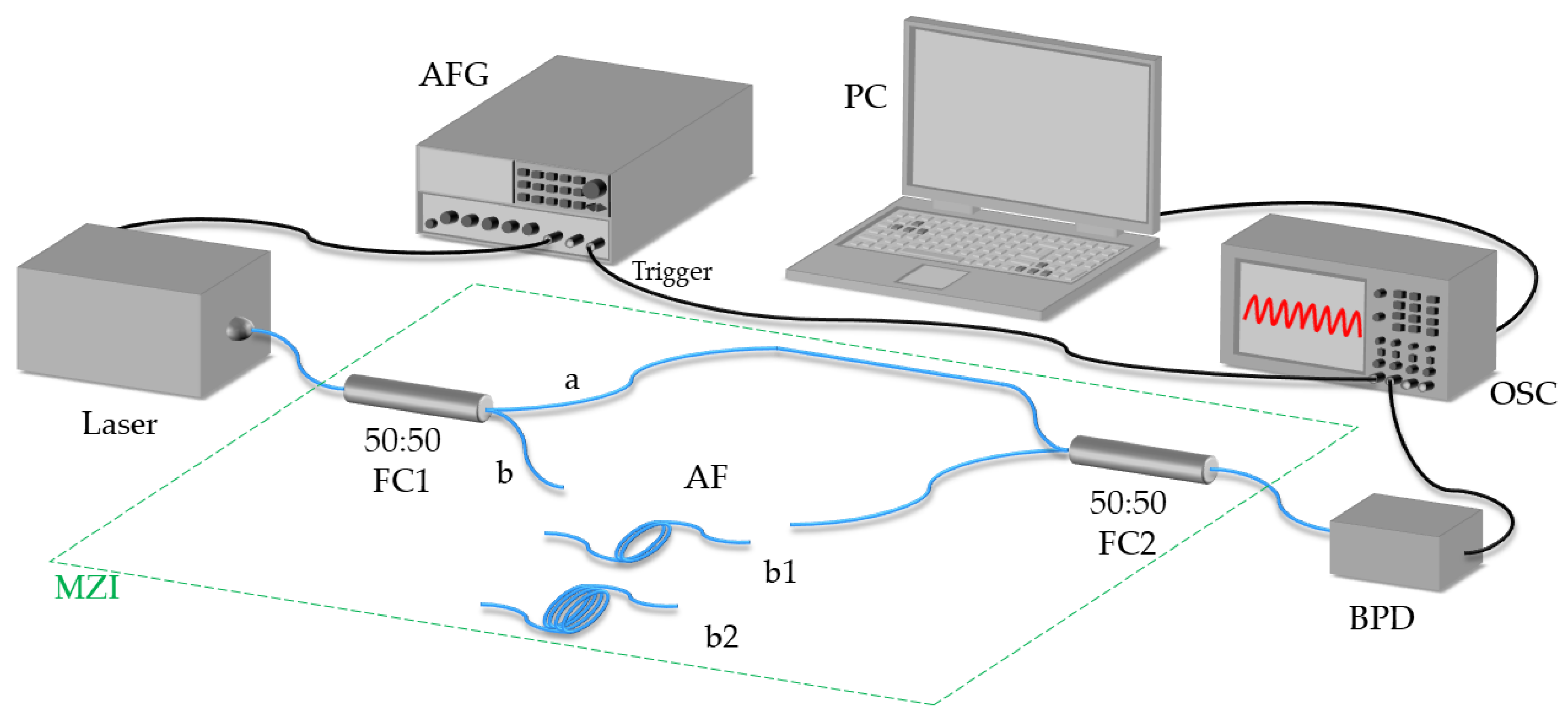
The experimental setup used in the optical frequency sweep nonlinear measurement experiment is depicted in
Figure 2. In the experiment, the tunable laser is an ultra-narrow linewidth laser module of 1550 nm, and the frequency modulation factor is about 54 MHz/V. The arbitrary function generator (AFG) generates a modulated triangular wave to modulate the laser. The frequency sweep light output by the laser is split by a
fiber coupler (FC1) with a coupling ratio of 50:50. The length and delay information of the alternative fiber (AF) in channel-b are shown in
Table 1. The reference optical signal and the delayed optical signal are mixed at a 3 dB fiber coupler (FC2) to form a beat signal, which is then received by the balanced photodetector (BPD) and finally displayed on the oscilloscope (OSC). A personal computer (PC) is connected to the oscilloscope, which reads the data from the oscilloscope. The PC then performs a Hilbert transform (HT) on the beat signal to extract the optical frequency sweep signal and calculate its nonlinearity.
3.1. The Repeatability Measurement
As previously mentioned, the derivations presented in this paper are based on the prerequisite that the optical frequency sweep curve output by the laser exhibits excellent repeatability. To illustrate this issue, we conduct the following repeatability experiment. The AFG generates a triangular wave with a frequency of 2.5 KHz and an amplitude of 10 Vpp, causing the laser to generate an optical frequency sweep signal with a bandwidth of approximately 540 MHz. The MZI has its channel-b replaced with an alternative fiber b1. The BPD receives the beat signal
, which is then displayed on the OSC. The PC is responsible for calculating the optical frequency sweep curve. We collect a set of beat signal data from the oscilloscope every 40 s without replacing the alternative fiber. A total of 20 sets of data are collected, resulting in a total time expenditure of 800 s. Based on the derivations presented earlier, and by employing the Hilbert transform (HT) and utilizing the accurately measured delay
of the alternative fiber instead of the total delay difference
of the MZI, we can directly calculate 20 sets of optical frequency sweep curves using Equation (
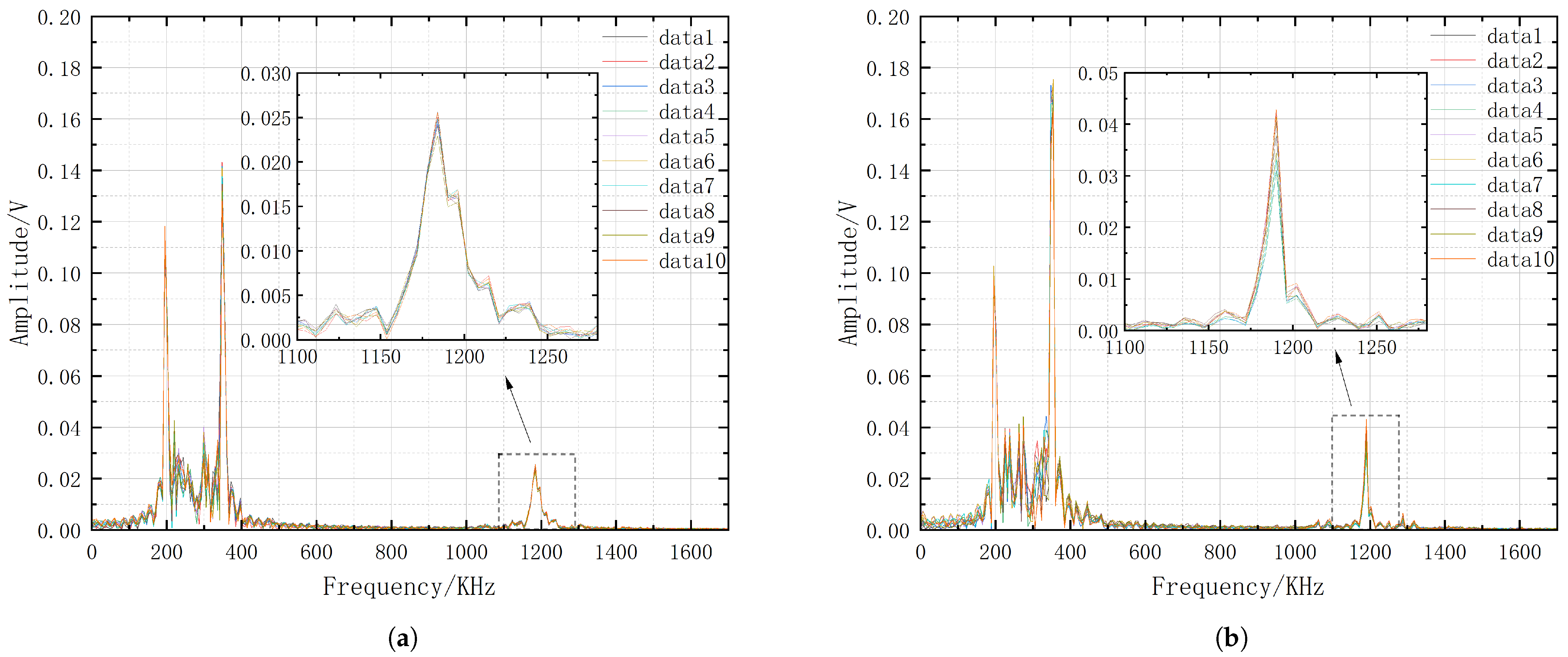
2). Placing these curves on the same coordinate system allows for the observation of the repeatability of the optical frequency sweep signal output by the laser. The results are depicted in
Figure 3a. In this paper, only the beat signals generated during the up ramp of the triangular wave are extracted for the calculation of the optical frequency sweep curves (the calculation for the down ramp is analogous). From the results, it is observed that since the value
used for calculation is less than
, the resulting optical frequency sweep curves exhibit a frequency sweep bandwidth larger than the preset value. However, this does not affect the assessment of the repeatability measurement results for the optical frequency sweep. If the repeatability is sufficiently good, despite the slightly broader frequency sweep bandwidth, ideally, the 20 sets of optical frequency sweep curves should perfectly coincide. In fact, owing to the inherent stability issues of the laser and the impact of environmental factors such as temperature and vibration, they do not perfectly align but instead form a set of lines with a certain breadth, indicating a range of variations [
29].
To ascertain their repeatability more clearly, we perform the following calculations: By averaging the 20 sets of optical frequency sweep curves and fitting them to one curve, which is considered the true value
of the optical frequency sweep signal output by the laser, and each individual set is regarded as a predicted value
. Consequently, the root mean square error (RMSE) can be calculated for each set by
, where
n is the number of sampling points. The RMSE for each set is then averaged to obtain the mean RMSE, which is given by
, Thus, the repeatability of the optical frequency sweep signal output by the laser can be defined by this mean RMSE, serving as a quantitative indicator of the signal’s consistency across the individual sets. The repeatability
is defined as
where
is the frequency sweep bandwidth. This definition measures the relative deviation of the optical frequency sweep signal at different times as a proportion of the entire frequency sweep bandwidth
. Given that
is already determined, the smaller the mean
of 20 sets of RMSE, the higher the repeatability of the optical frequency sweep signal.
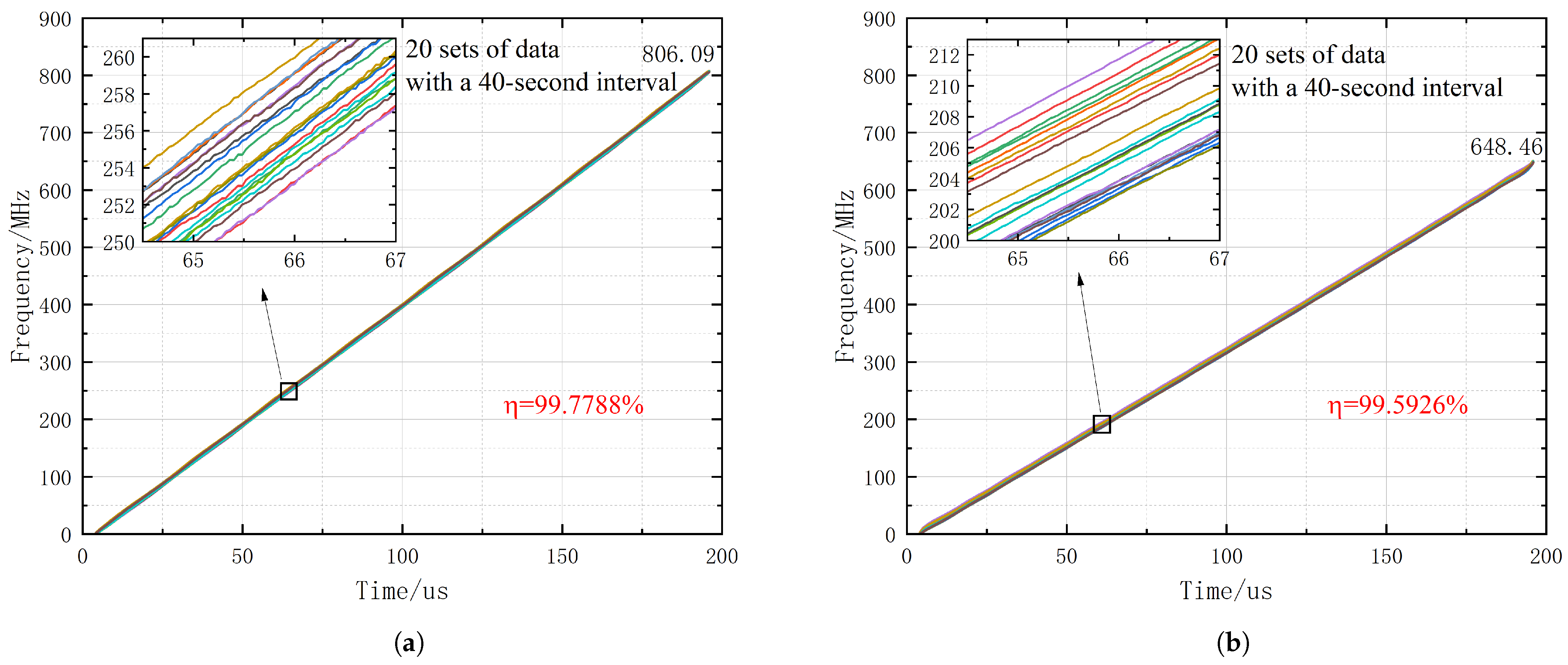
The experimental data analysis indicates that when b1 is used in the MZI, the repeatability of the measured 20 sets of optical frequency sweep curves is 99.7788%. Similarly, when b2 is used in the MZI, a set of beat data is collected every 40 s, and 20 sets of data are collected and used to calculate the optical frequency sweep curves. The results, plotted on the same coordinate system as shown in
Figure 3b, demonstrate a repeatability of 99.5926%.
The calculated results indicate that the repeatability of the frequency-modulated signal output by the laser is very good, meaning that the optical frequency sweep signal does not significantly change with time or remains stable over a short period. Under these conditions, the proposed method for measuring the optical frequency sweep using alternative fibers in a calibration-free MZI is effective, thereby ensuring the accuracy of the nonlinearity measurement of the optical frequency sweep.
3.2. The Nonlinearity Measurement
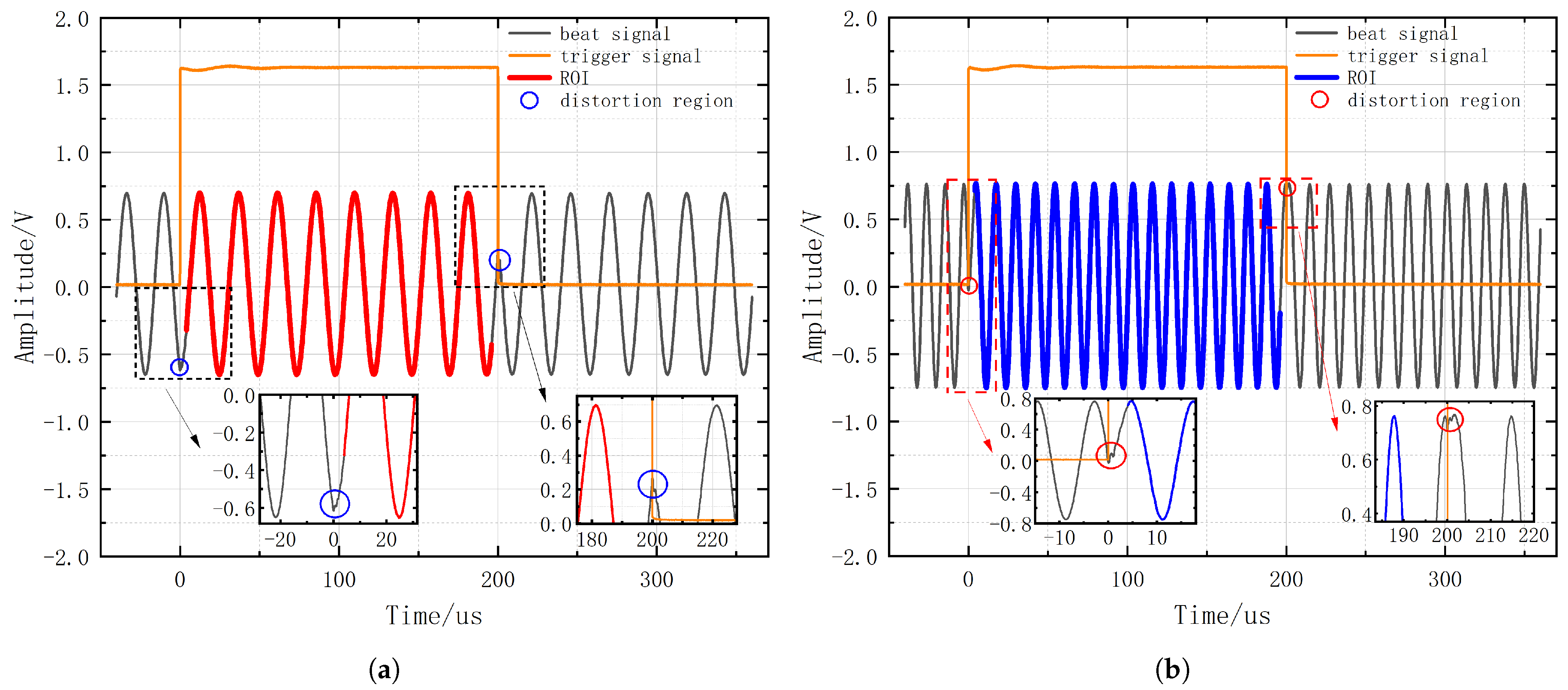
Within the MZI, channel-b is equipped with the alternative fiber b1. The BPD receives the beat signal
, which is then displayed on the OSC. To more precisely calculate the optical frequency sweep curve and its nonlinearity, the OSC’s sampling rate is set to 25 MS/s, with a single sampling record length of 10,000 points. The single-shot sampling result of the beat signal is depicted in
Figure 4a. The beat signal corresponding to the high-level state (approximately 1.6 V) of the trigger signal is generated during the up ramp of the frequency sweep, while the beat signal corresponding to the low-level state (0 V) of the trigger signal is generated during the down ramp. It can be observed that the beat signal exhibits noticeable distortion near the transition of the up and down ramps. The distortion is due to the significant frequency sweeping nonlinearity at the transition of the up and down ramps. In order to mitigate the impact of this distortion on the computational accuracy of the optical frequency sweep signal, 100 sampling points are cut off respectively at the beginning and end of the beat signal corresponding to the up ramps in the experiment, totaling a sampling time of 8 μs. For a frequency sweep up ramp of 200 μs, a region of interest (ROI) of 192 μs is used for evaluating nonlinearity, which accounts for 96% of the frequency sweep up ramp. Utilizing the HT, the PC computes an optical frequency sweep curve
from the ROI of the beat signal by Equation (
2), employing the accurately measured delay
to act as the total delay difference
between the two arms of the MZI. Subsequently, with the experimental parameters remaining unchanged, the alternative fiber b2 is used in the MZI, and the beat signal obtained from a single-shot sampling is shown in
Figure 4b. Similarly, by using the delay
as the total delay difference
between the two arms of the MZI, another optical frequency sweep curve
is calculated by Equation (
3). Finally, the ROI data of the beat signals obtained in the first two steps are subtracted from each other, and then the optical frequency sweep curve
output by the laser can be calculated from
Table 1 and Equation (
5).
The three optical frequency sweep curves
,
, and
are placed in the same coordinate system, as shown in
Figure 5. It is evident that when the alternative fibers are used individually for the calculation of the optical frequency sweep curve, the frequency sweep bandwidths are 806.09 MHz (corresponding to b1) and 648.46 MHz (corresponding to b2), respectively. Compared with the preset value of approximately 540 MHz, these values are somewhat higher. This is because the delays
and
are smaller than the total delay difference; i.e., the delay
is ignored. The final calculated optical frequency sweep curve
has a frequency sweep bandwidth of 541.88 MHz, which is in accordance with the experimental expectations. This indicates that we do not necessarily need to know the exact value of the total delay difference between the two arms of the MZI to obtain the optical frequency sweep curve output by the laser, thereby validating the calibration-free MZI measurement method presented in this paper.
Once the optical frequency sweep curve is obtained, it can be used to calculate the nonlinearity. Regarding the nonlinearity of the optical frequency sweep curve output by the laser, different criteria have been proposed by various sources. However, two definitions are currently widely utilized. One of them is the nonlinearity
R, the expression of which is given by [
30]
where
is the root mean square of residual frequency errors,
is the optical frequency points obtained from a single measurement of the optical frequency sweep curve,
is the optical frequency points of the fitting curve obtained by the linear function fitting of
,
n is the number of sampling points, and
is the frequency modulation bandwidth.
reflects the frequency deviation error between the measured optical frequency sweep curve and the fitting curve. The nonlinearity
R presents the proportion of the optical frequency sweeping nonlinearity error to the sweep bandwidth in a percentage form, providing a clear and intuitive measure of the impact of nonlinearity errors on the bandwidth. Consequently, the nonlinearity
R of the measured optical frequency sweep curve
in the experiment can be calculated to be 0.2113%.
The other is the relative nonlinearity
, the expression of which is given by [
13]
where
is the sum of residual squares,
is the total sum of squares,
and
are the same as above,
is the mean value of
, and
n is the number of sampling points.
reflects the deviation between
and
, and
reflects the deviation between
and
. The relative nonlinearity
, from a statistical perspective, uses the mean as a benchmark error, observing whether the frequency deviation error is greater or less than the mean benchmark error to assess the nonlinearity. The smaller the value, the better the linearity of the optical frequency sweep curve. Consequently, the relative nonlinearity
of the measured optical frequency sweep curve
in the experiment can be calculated to be 5.3560 × 10
−5.
According to the analysis and derivation from the nonlinearity measurement experiment, once we obtain an optical frequency sweep curve
, with the beat signal
measured in this experiment, we can retro-calculate the accurate total delay difference
in the MZI by Equation (
2), i.e.,
. That is to say that when utilizing the alternative fiber b1,
is 14.592 ns. Similarly, when utilizing the alternative fiber b2,
is 29.248 ns. In this way, the total delay differences corresponding to the two alternative fibers in the MZI are known quantities, facilitating the use of this interferometer for subsequent extended experimental research, such as the frequency sweep linearization of the FMCW LIDAR light source, speed and distance measurement, and three-dimensional imaging.
3.3. The Accuracy Verification
As shown in
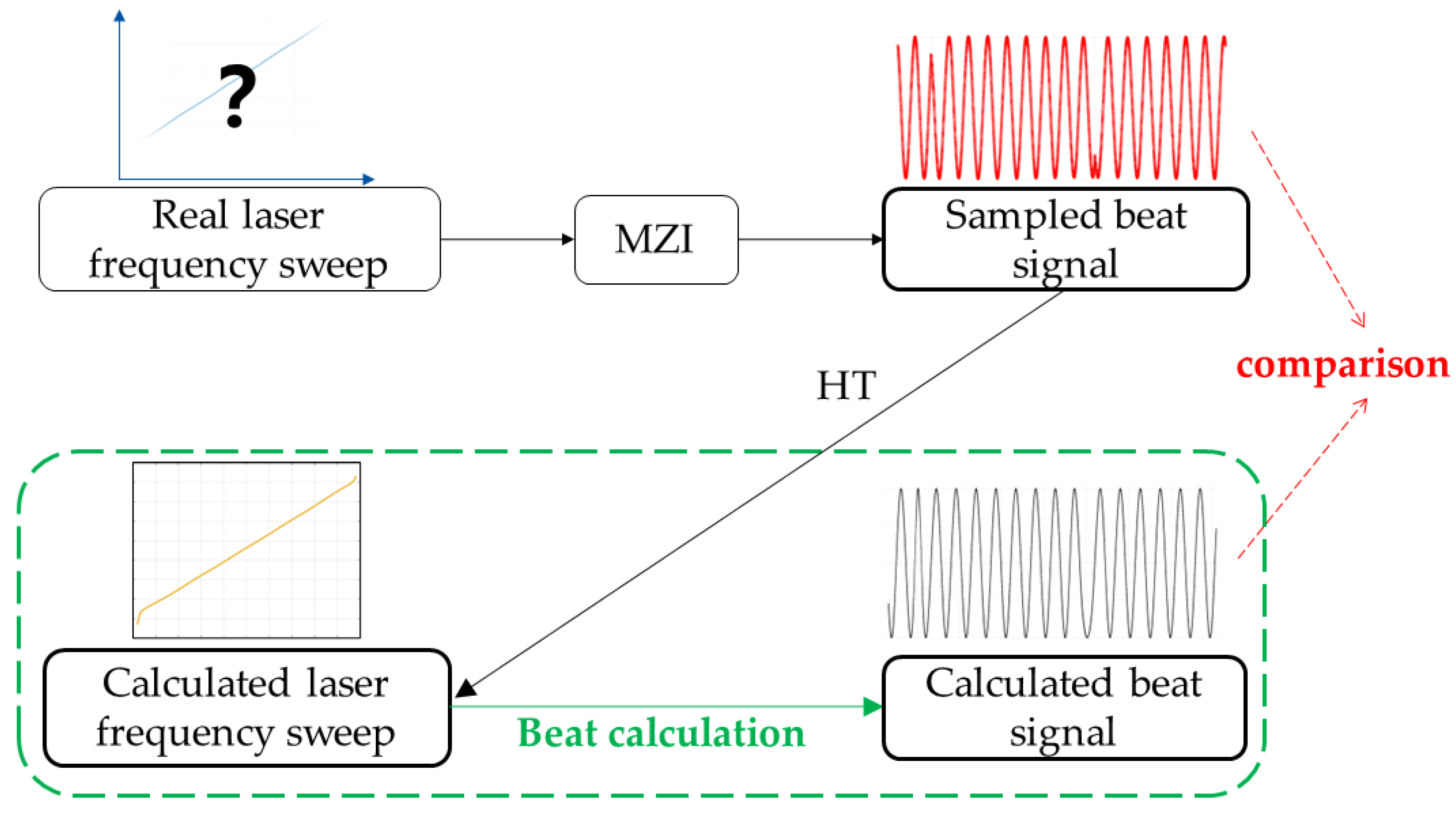
Figure 6, the measured optical frequency sweep curve in the experiment is derived by down-converting the optical frequency to an intermediate frequency, known as the beat signal, in the MZI and then performing an HT on the beat signal. Since the optical frequency sweep signal output by the laser is difficult to sample directly, the accuracy of the measured optical frequency sweep curve cannot be directly assessed. However, it can be affirmed that the beat signal sampled through the MZI is accurate and reliable. Therefore, the optical frequency sweep curve obtained from the experiment can be subjected to numerical calculations and simulations within software to emulate the beat signal detected by the detector. By comparing the calculated beat curve with the experimentally sampled beat signal, if there is a good agreement between them, it indicates that the measured optical frequency sweep curve in the experiment is accurate. This validation process is crucial for confirming the fidelity of the experimental results and ensuring the reliability of subsequent analyses and applications.
It has been reported that the accuracy of the measured optical frequency sweep curve is verified by performing polynomial fitting on the measured optical frequency sweep curve and then integrating the result to obtain the optical frequency sweep phase, thereby performing the beat reproduction to compare whether the calculated beat spectrum is consistent with the sampled beat spectrum [
31]. Based on this method, we do not perform polynomial fitting but instead interpolate the measured optical frequency sweep curve, and then integrate the result to obtain the optical frequency sweep phase. At last, we simulate the process of an optical frequency sweep signal being split, delayed, and mixed in the MZI, using the optical frequency sweep phase, to replicate the sampled beat signal. The specific procedure is as follows:
Through the experiments and calculations of the previous subsection, we are able to obtain the optical frequency sweep curves
and
, as well as the total delay difference
and
between the two arms of the MZI. Given the OSC’s sampling interval of 40 ns, to enhance the point density of the optical frequency sweep curve, we perform interpolation on
and
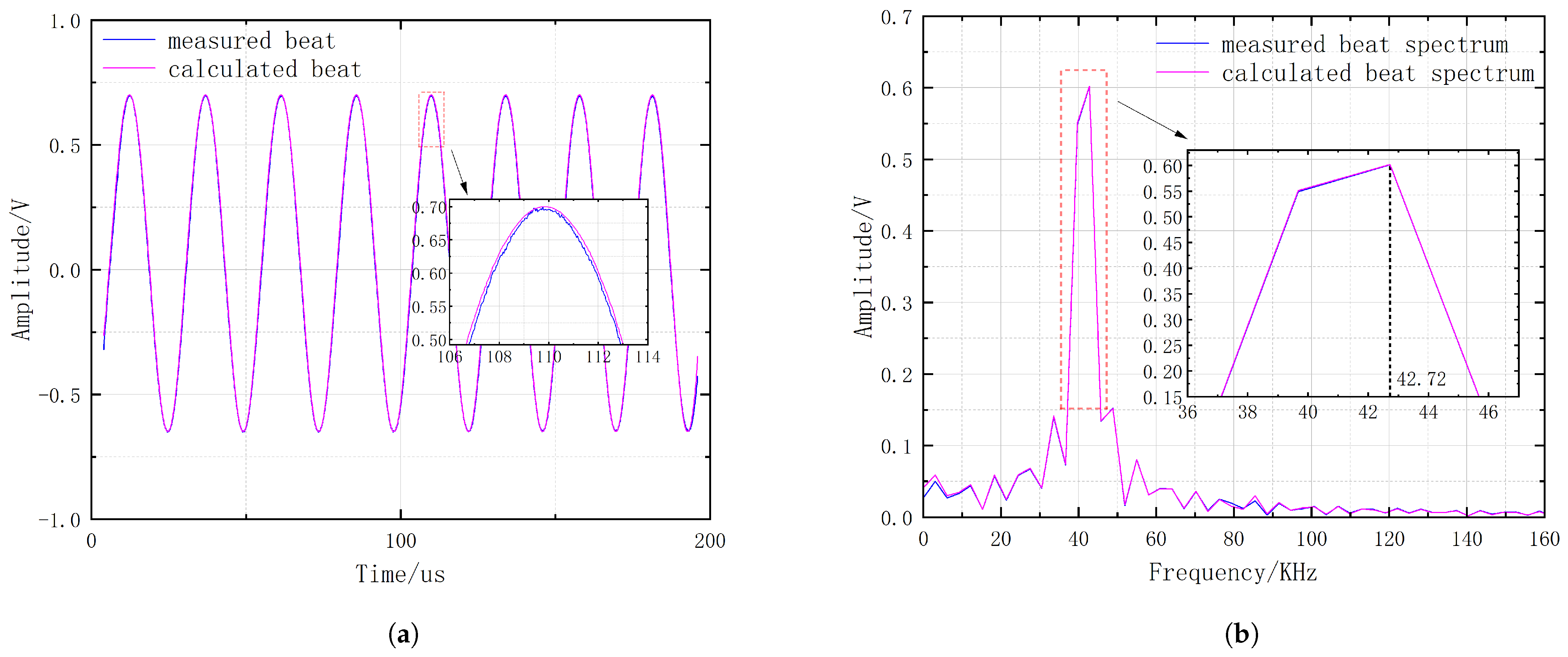
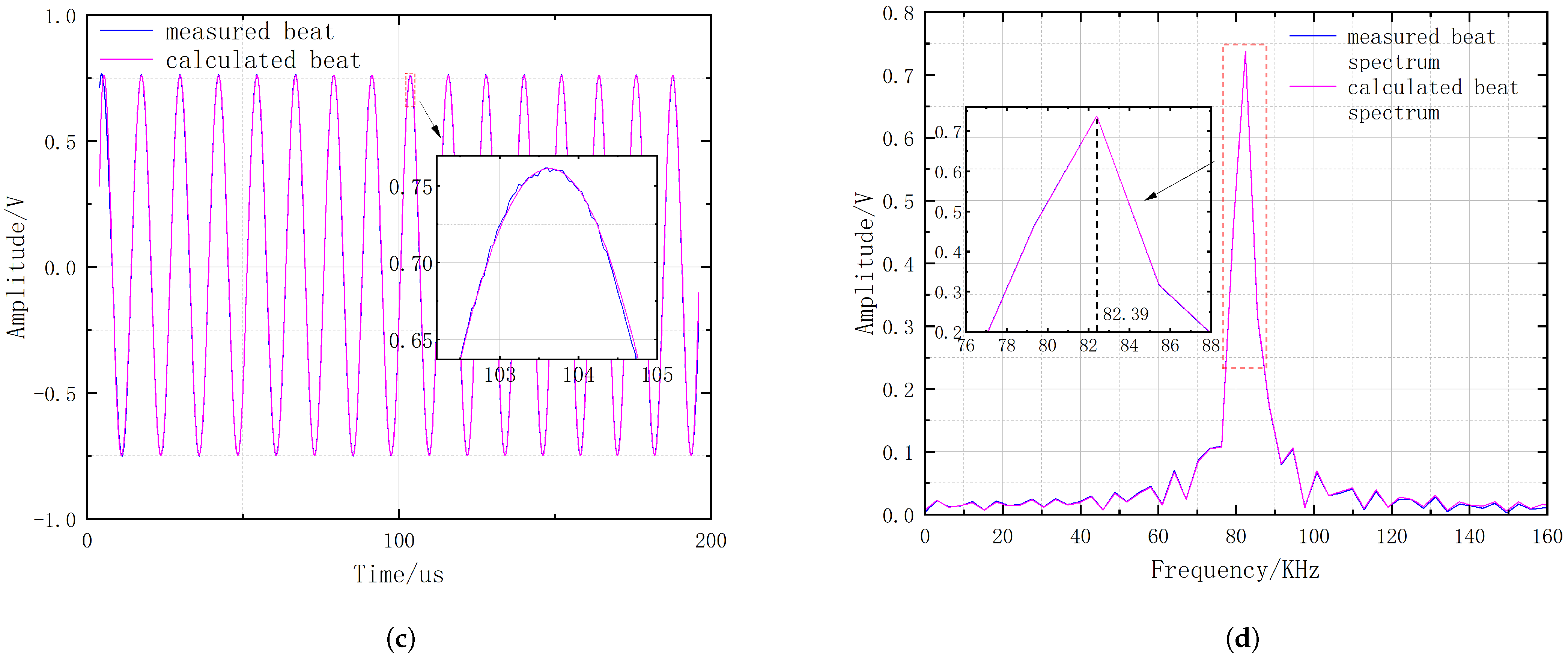
with an interpolation interval of 8 ps, which increases the data points to 5000 times the original amount, and then integrate the results to derive the optical frequency sweep phase. Using the high-density beat phase difference allows for the reproduction of the beat signal. In this process, the delay precision is also improved to the thousandths with the increase in data points, thereby enhancing the accuracy of reproduction. In order to compare with the sampled beat signal, it is also necessary to perform downsampling on the calculated beat curve to ensure that their data point densities are consistent. Since the optical frequency sweep curve obtained from the previous experiment was calculated from the ROI of the beat signal corresponding to the frequency sweep up ramp, the beat curve reproduced here will also only correspond to the up ramp of the frequency sweep. The experimentally sampled beat signal and the calculated beat curve are plotted on the same coordinate system for comparison. To more clearly observe the degree of agreement between them, their beat spectra are also compared on the same coordinate system. The results are shown in
Figure 7, demonstrating an effect that is comparable to the polynomial fitting methods used in reported studies. In the time domain, they are found to almost coincide; in the frequency domain, their peak frequencies, that is, the beat frequencies, are in complete agreement. There is only a minor difference in amplitude between them in both the time and frequency domain. The beat frequencies corresponding to the alternative fibers b1 and b2 are 42.72 kHz and 82.39 kHz, respectively. Indeed, whether in the time domain or the frequency domain, there is a close match between the beat signal sampled from the experiment and the beat curve derived from the calculations. This confirms the validity of the optical frequency sweep curve and its nonlinearity data measured in the previous experimental section.
3.4. The Temperature Insensitivity Verification
As mentioned above, this method is virtually unaffected by fluctuations of the experimental ambient temperature. To illustrate this issue, we conduct the following temperature insensitivity verification experiment.
The procedures of the temperature insensitivity verification experiment are essentially consistent with those described in
Section 3.2. The difference lies in the fact that we place the fibers, which are not involved in the final calculation of the frequency sweep curve—specifically, the fiber connecting the optical components—into a heating pad. Through the action of the heating pad, the fibers are subjected to different temperatures to assess the adaptability of the method presented in this paper for measuring the frequency sweep curve under various temperature environments. Prior to the activation of the heating pad, we measure the ambient temperature of the experimental setup, as shown in
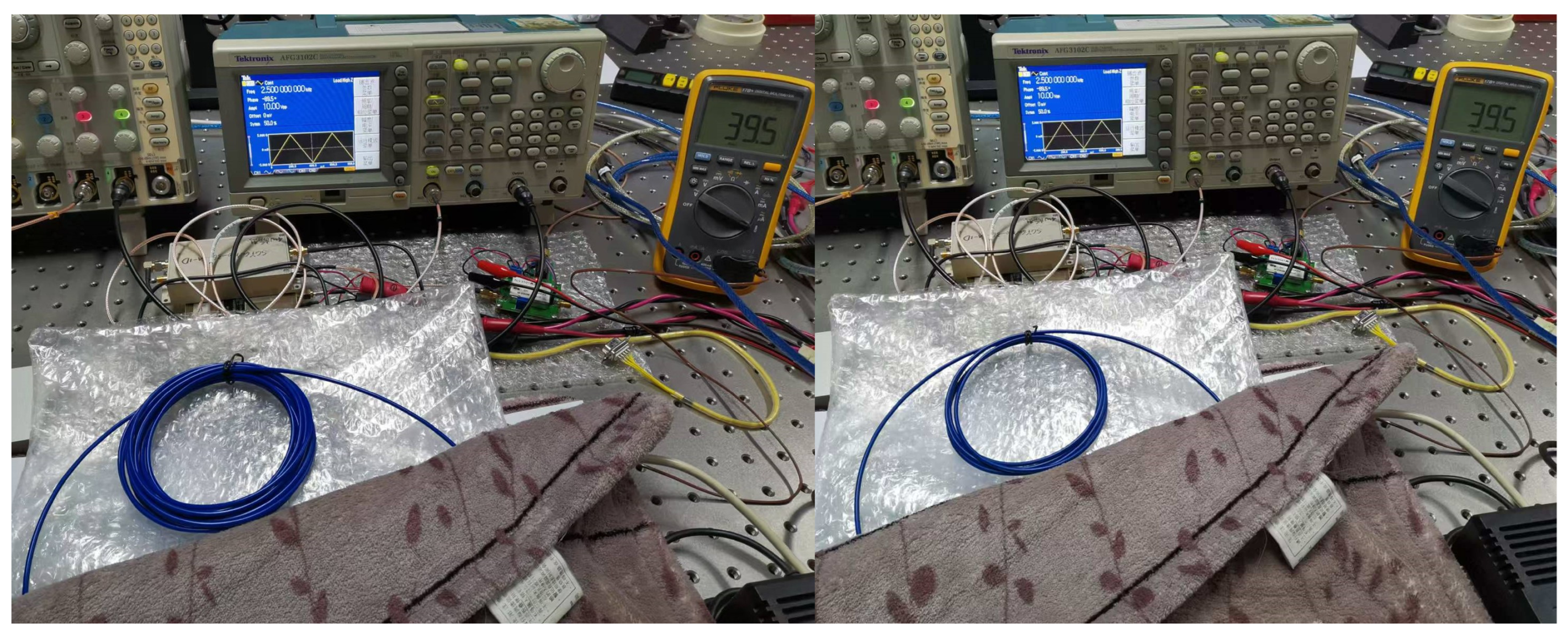
Figure 8, where the ambient temperature, that is, the room temperature, is 24.1 °C. Subsequently, the heating pad envelops the fibers and heats them to a specific temperature (note that the two alternative fibers are kept in a room-temperature environment). Once the temperature stabilizes, the two alternative fibers are alternately inserted to one arm of the MZI for two separate measurements of the frequency sweep curve, as depicted in
Figure 9. Finally, based on the calculations described earlier, the final optical frequency sweep curve could be derived.
Through this experimental process, we control the temperature inside the heating pad at 24.1, 30.4, 39.5, and 44.0 °C to conduct the frequency sweep measurements (due to equipment limitations, the highest experimental temperature could only reach 44.0 °C). The final frequency sweep curves calculated are shown in the same coordinate system in
Figure 10. The repeatability of the four frequency sweep curves can be calculated using Equation (
6) to be 99.8235%.
Critically, the method for measuring the optical frequency sweep curve presented in this paper first places the two alternative fibers in a room-temperature environment and then alternately inserts them to one arm of the MZI during measurement. Despite the fact that the lengths or delays of the fibers connecting other optical components may be subject to changes due to temperature fluctuations during the experiment, they are not involved in the calculation of the optical frequency sweep curve. This method does not require prior calibration of the MZI’s arm length difference; it only necessitates knowledge of the delays of the two alternative fibers, with no special requirements for other configurations of the interferometer. This not only enhances the flexibility of the experimental setup in facing various measurement environments but also, importantly, makes it minimally susceptible to the effects of environmental temperature fluctuations, which further demonstrates the accuracy of the optical frequency sweep curves measured in this paper.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}