
A Synthetic Aperture Radar Imaging Simulation Method for Sea Surface Scenes Combined with Electromagnetic Scattering Characteristics




Abstract
1. Introduction
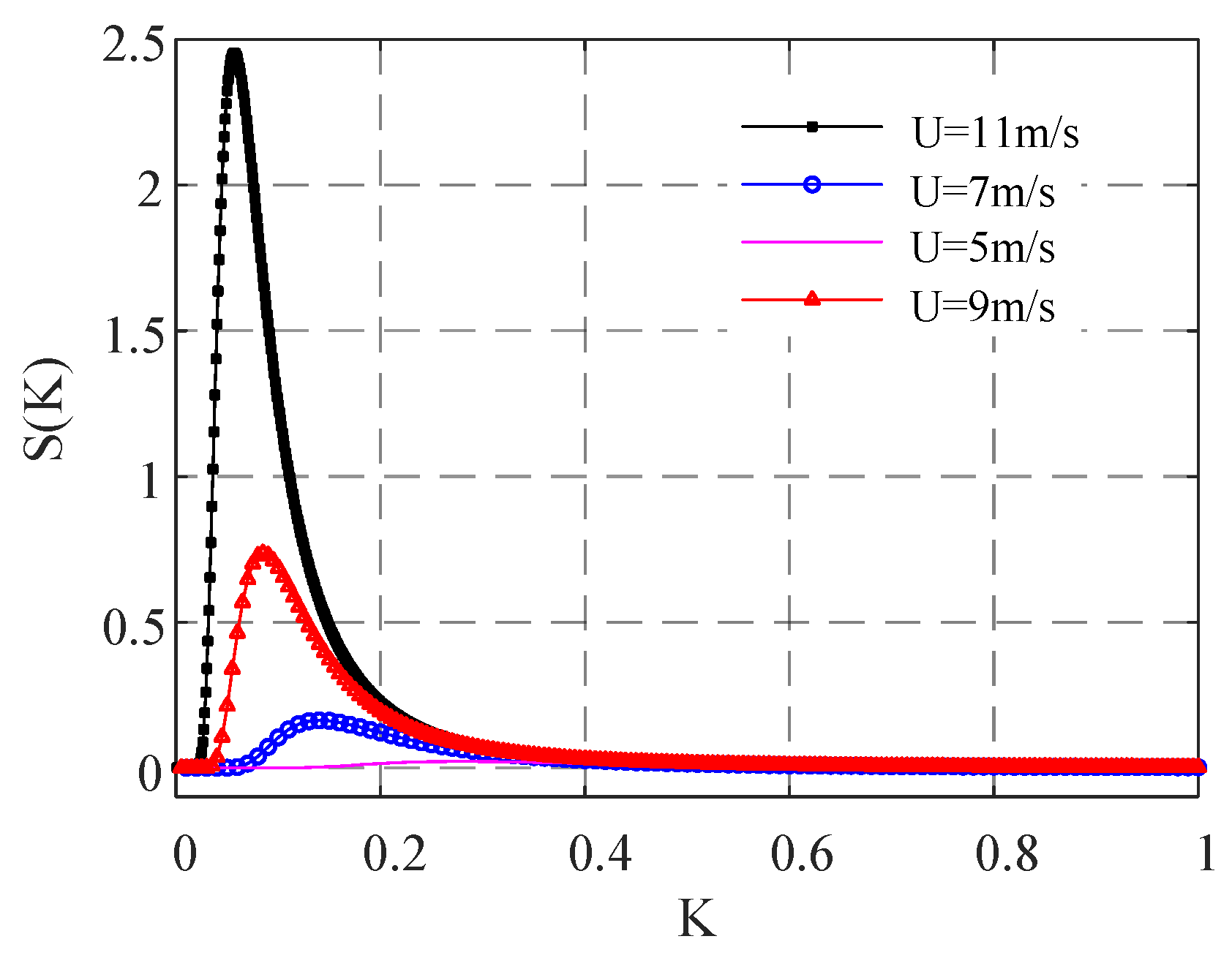
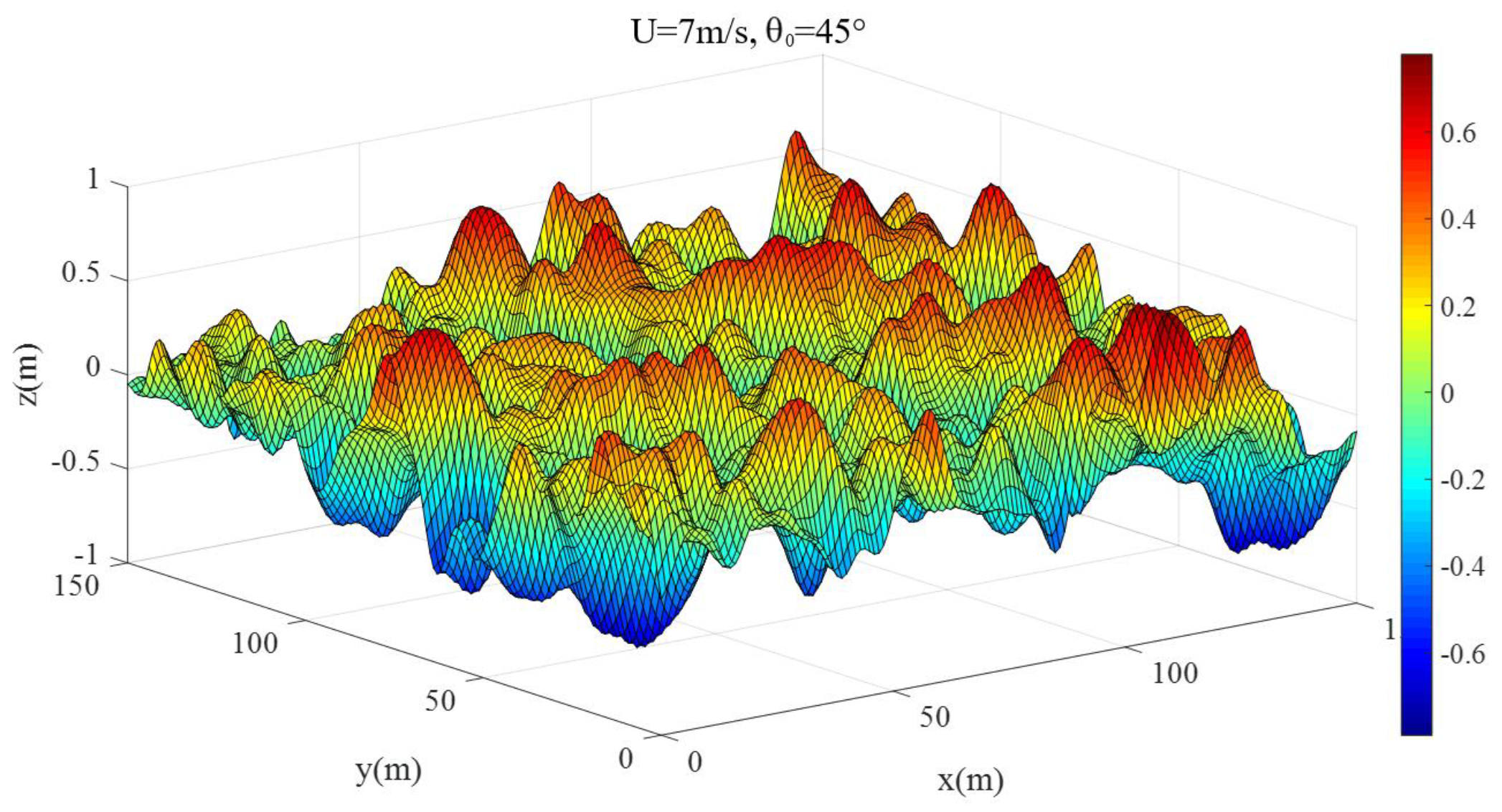
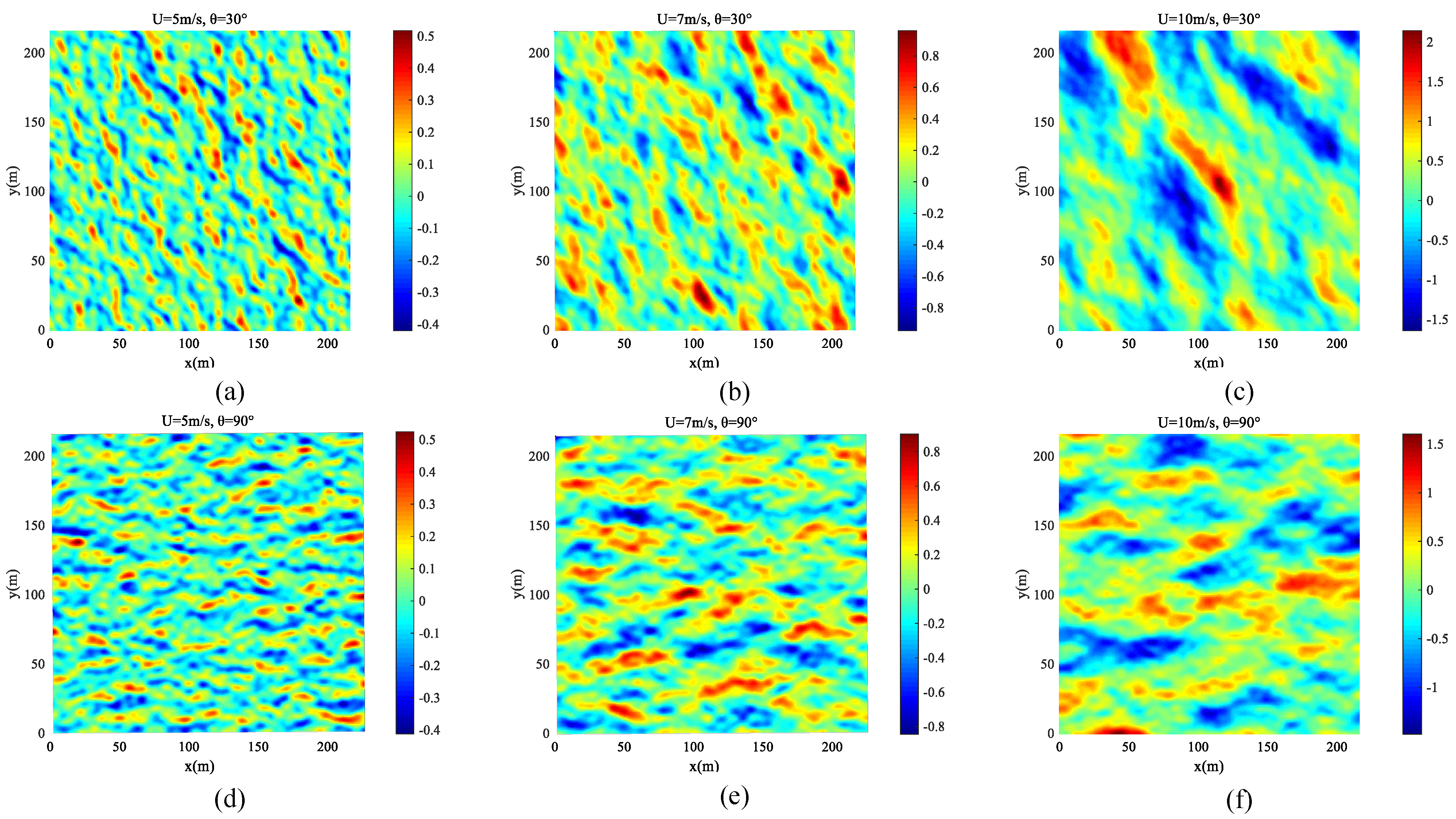
- In combination with the SWAP directional extension function, the sea surface model based on the P-M spectrum is established, accounting for sea surface wave fluctuations under different wind speeds.
- The SBR-PO method is utilized to perform the scattering calculations for multiple composite targets on the sea surface. The fundamental principles of sea surface scattering are investigated, along with the scattering characteristics under various sea surface conditions and electromagnetic incidence scenarios.
- Using the scattering simulation results, SAR imaging of composite targets, including the sea surface, ships, and interference, is conducted. The influence of various factors on composite scattering is also analyzed.
2. Computation of Composite Target Scattering on the Sea Surface
2.1. Construction of Sea Surface Geometry Model
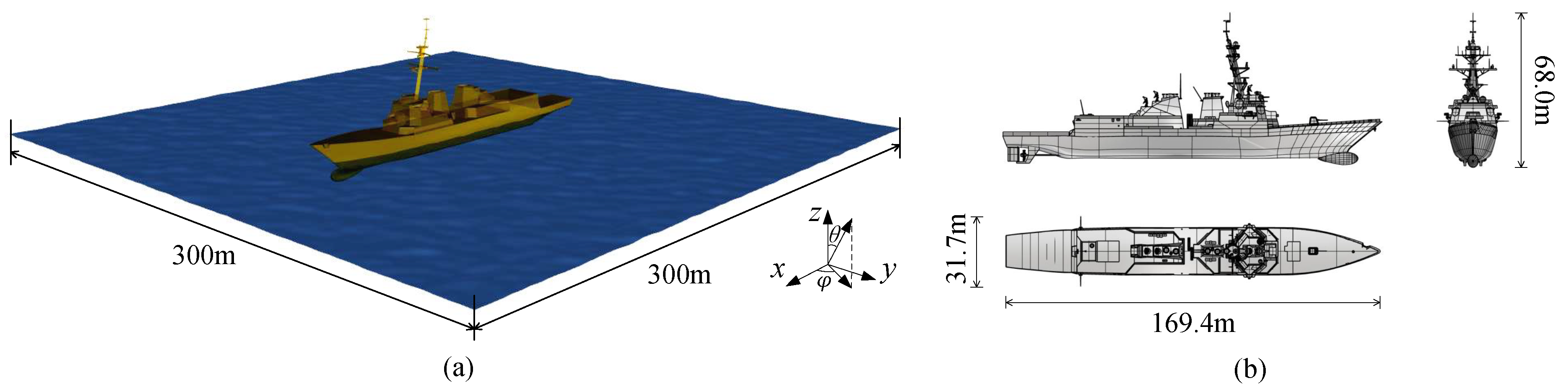
2.2. Computation of Composite Target Scattering on the Sea Surface
- Single scattering by target;
- Single scattering by sea surface;
- Multiple scattering by target;
- Multiple scattering by sea surface;
- Coupled scattering between the sea surface and target;
- Coupled scattering between the target and target.
3. Composite Scattering Calculation and Analysis
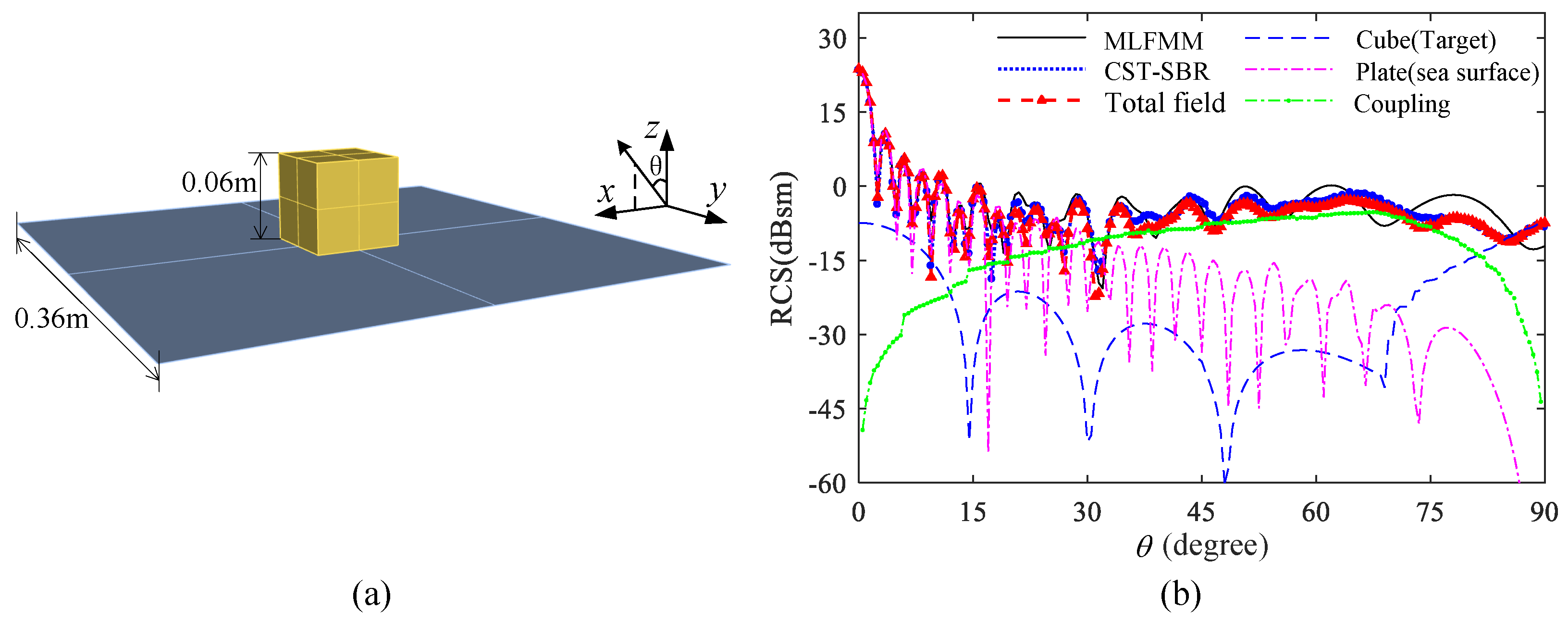
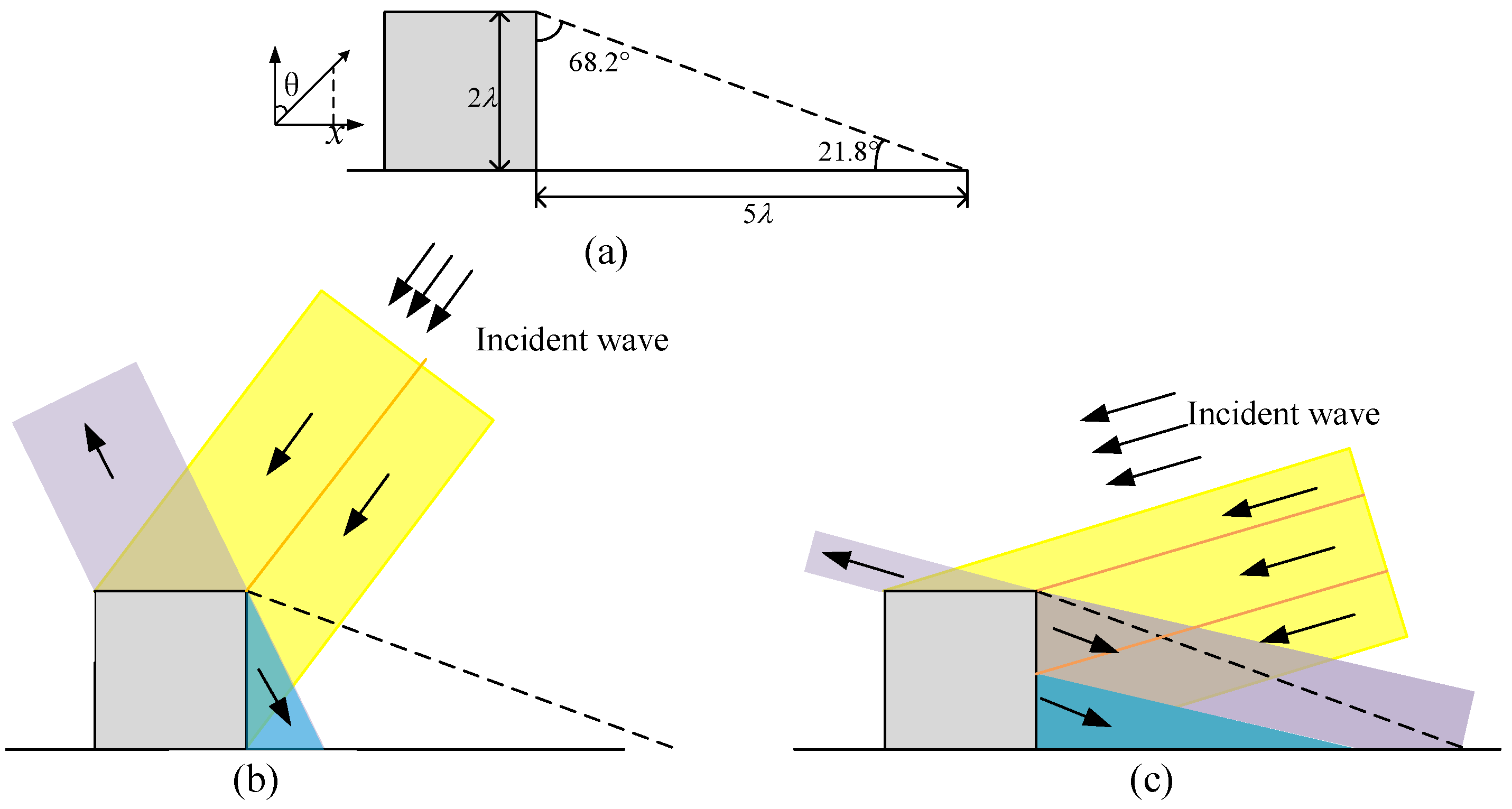
3.1. Plate–Cube Combined Scattering Model
- The scattering field of the flat plate generally exhibits the characteristics of a single flat plate as changes. However, due to the obstruction by the cube, discrepancies from the single flat plate scattering characteristics occur at certain angles.
- When 68.2°, the incident wave is divided into two parts. One part irradiates the upper surface of the cube and then is emitted, corresponding to the cube scattering component. The other part irradiates the side surface of the cube, is completely reflected on the flat plate, and then is emitted, corresponding to the cube-flat plate coupled scattering component. Therefore, when 68.2°, as increases, the coupled scattering exhibits dihedral scattering characteristics and gradually increases, while the cube scattering presents flat plate scattering characteristics, with its contribution coming from the upper surface of the cube.
- When 68.2°, the incident wave is divided into three parts. One part continues to irradiate the upper surface of the cube and is emitted, corresponding to the cube scattering component. The incident wave irradiating the side surface of the cube can be further divided into two parts: one part is reflected on the flat plate and then is emitted, corresponding to the cube–flat plate-coupled scattering component, and the other part is reflected and directly emitted, corresponding to another cube scattering component. Therefore, when 68.2°, as increases, the coupled scattering gradually decreases, while the cube scattering gradually increases. At this point, the scattering contribution comes not only from the upper surface of the cube but also from a portion of the side surface of the cube.
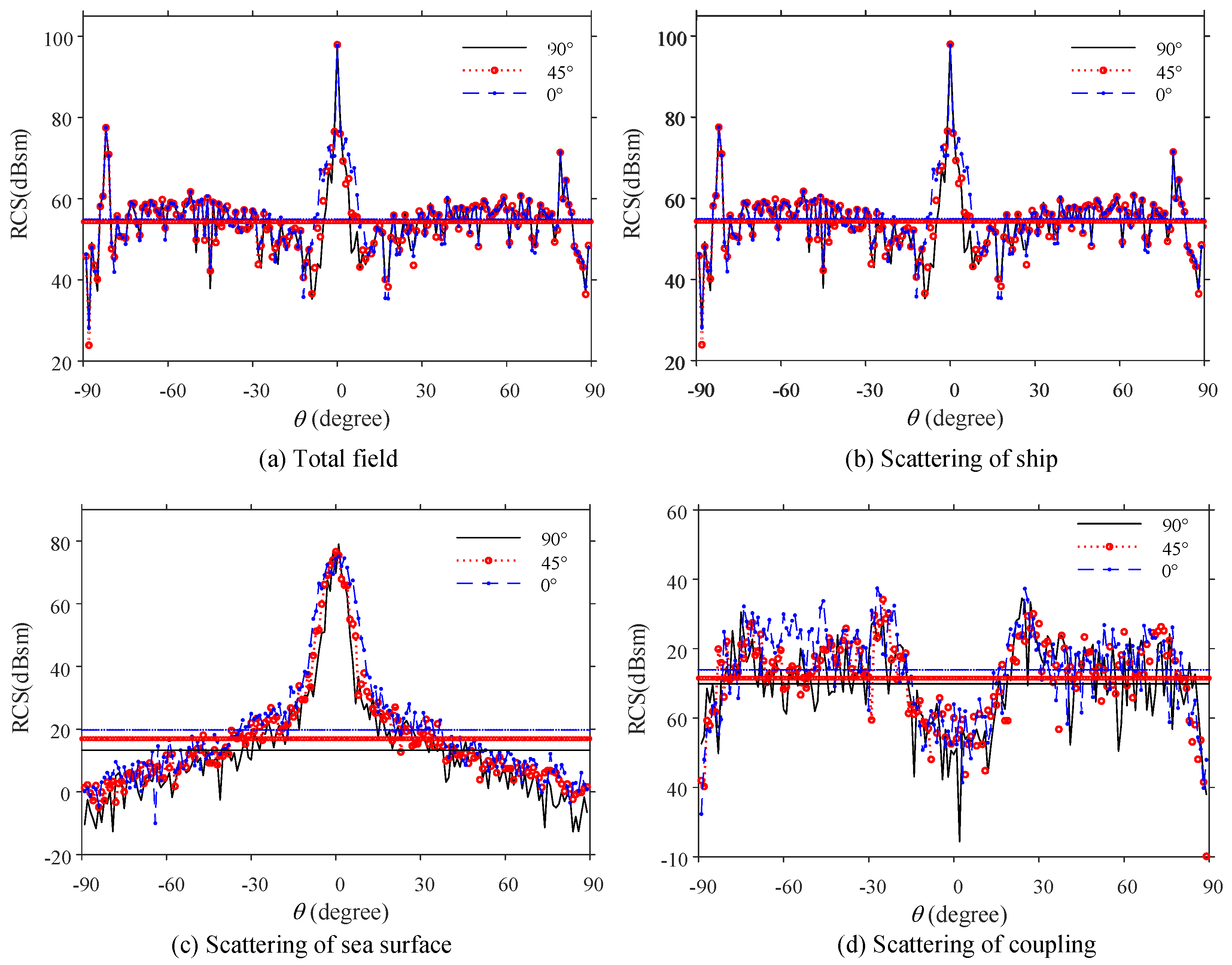
3.2. Sea Surface–Single Ship Scattering Model
- The sea surface scattering field exhibits good symmetry with the change in angle , generally following a trend similar to the scattering characteristics of the flat plate. As changes, the sea surface scattering significantly varies, peaking at normal incidence. As the direction deviates from normal incidence, the sea surface scattering field gradually weakens.
- The ship scattering field shows a degree of symmetry when 90°, attributed to the bilateral symmetry of the ship’s structure, with minor differences in details. It is not symmetrical when 0° because as changes from 90° to 0°, the incident wave transitions from the stern to the top of the ship. During this transition, several large dihedral-like structures or grooves on the hull generate significant multiple scattered field values. When changes from 0° to 90°, the incident wave shifts from the top of the ship to the bow, where the hull structure is more complex and the dihedral-like structures are less regular, resulting in a reduced overall scattering value.
- The fluctuation of the total field is determined by the combined contributions of the sea surface, the ship, and the coupled fields. However, due to the strong scattering from the ship, the total field fluctuation is primarily influenced by the ship’s scattering at most angles. Only within a small angle range near normal incidence ( 0°) does the sea surface scattering become more pronounced, causing the total field fluctuation to follow the sea surface scattering.
- The analysis of sea surface–ship scattering can be informed by the example of plate–cube scattering. When 90°, the incident wave deviates from the normal incidence angle of the sea surface. As increases, the coupled scattering initially increases and then decreases. The coupled scattering caused by the large-scale dihedral-like structure formed by the sea surface and the ship hull gradually intensifies. Near the angle close to grazing incidence on the sea surface, the coupled scattering intensity weakens. Similarly, when 0°, the coupled field generally shows a trend of first increasing and then decreasing as the incident wave transitions from normal incidence to grazing incidence. However, since the dihedral-like structure formed by the front and rear hulls of the ship and the sea surface is smaller than that formed by the left and right hulls of the ship and the sea surface, and the front and rear of the ship are not symmetrical, the coupled field lacks symmetry and has a smaller overall value compared to when 90°.
3.2.1. Effects of Different Sea Surface Wind Speeds on Composite Scattering
- Ship Scattering: Ship scattering is independent of the sea surface wind speed; it essentially does not change under different wind speeds.
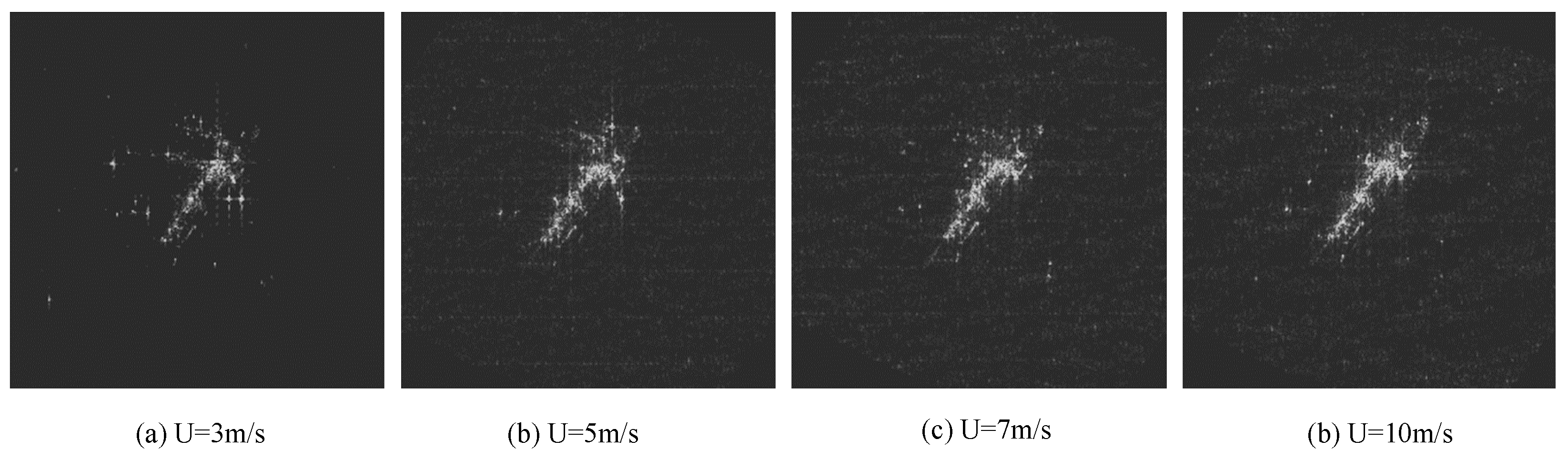
- Sea Surface Scattering: The sea surface scattering under different wind speeds has the same trend as the change in . When the incident wave changes from normal incidence to grazing incidence, it presents a gradually decreasing flat-plate scattering characteristic. Near the normal incidence sea surface angle, the sea surface mirror scattering is strong. With the increase in wind speed, the undulation of the sea surface gradually increases, and the peak range near the normal incidence angle is slightly widened. However, as the angle increases further, the undulating sea surface almost no longer has mirror conditions for the incident wave, and the overall law of sea surface scattering at different wind speeds tends to be consistent.
- Coupled Scattering: The corresponding RCS values are 38.3, 35.8, 35.5, and 36.9 dBsm when the wind speeds U are 3, 5, 7, and 10 m/s, respectively. Among them, when m/s, the coupled scattering is the strongest. With the increase in wind speed, the coupled scattering tends to decrease, but it is not strictly decreasing. This is because the coupled scattering is a multiple scattering field generated by the dihedral structure composed of the sea surface and the ship hull. The sea surface corresponding to the small wind speed is relatively stable, and the sea surface is in a low-undulation and small wave shape, which can make the incident wave have more stable multiple scattering between the ship and the sea surface, thereby obtaining a stronger coupling field. The sea surface corresponding to the larger wind speed is more violent, and the sea surface is in a large wave shape, making the multiple scattering of the incident wave between the ship and the sea surface unstable. Therefore, when the wind speed is small, the sea surface area is stable and the coupling is strong. When the wind speed increases, the sea surface area fluctuates violently, and the coupling is unstable. The change law of the coupling field with the wind speed is not significant.
- Total Field: The total field fluctuation is determined by the sea surface, the ship, and the coupled field. At most angles, the total field fluctuation is consistent with the ship’s target scattering field fluctuation. In the small angle range of normal incidence on the sea surface, the total field fluctuation is related to the fluctuation of the sea surface scattering field. For different wind speeds, the ship scattering is essentially unaffected, and the peak angle of the sea surface near the normal incidence angle slightly widens with the increase in wind speed. Therefore, changes in the total field are mainly observed near the angle range of 0°.
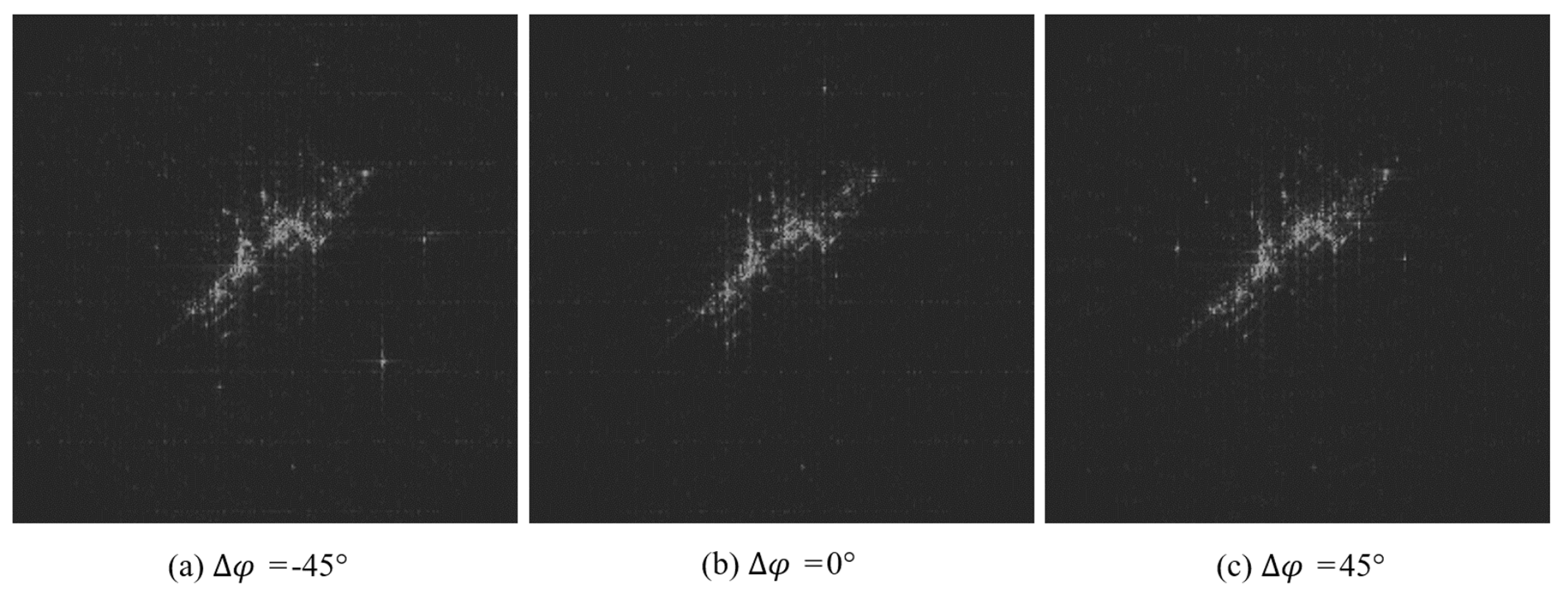
3.2.2. The Influence of Different Sea Surface Wind Angles on Composite Scattering
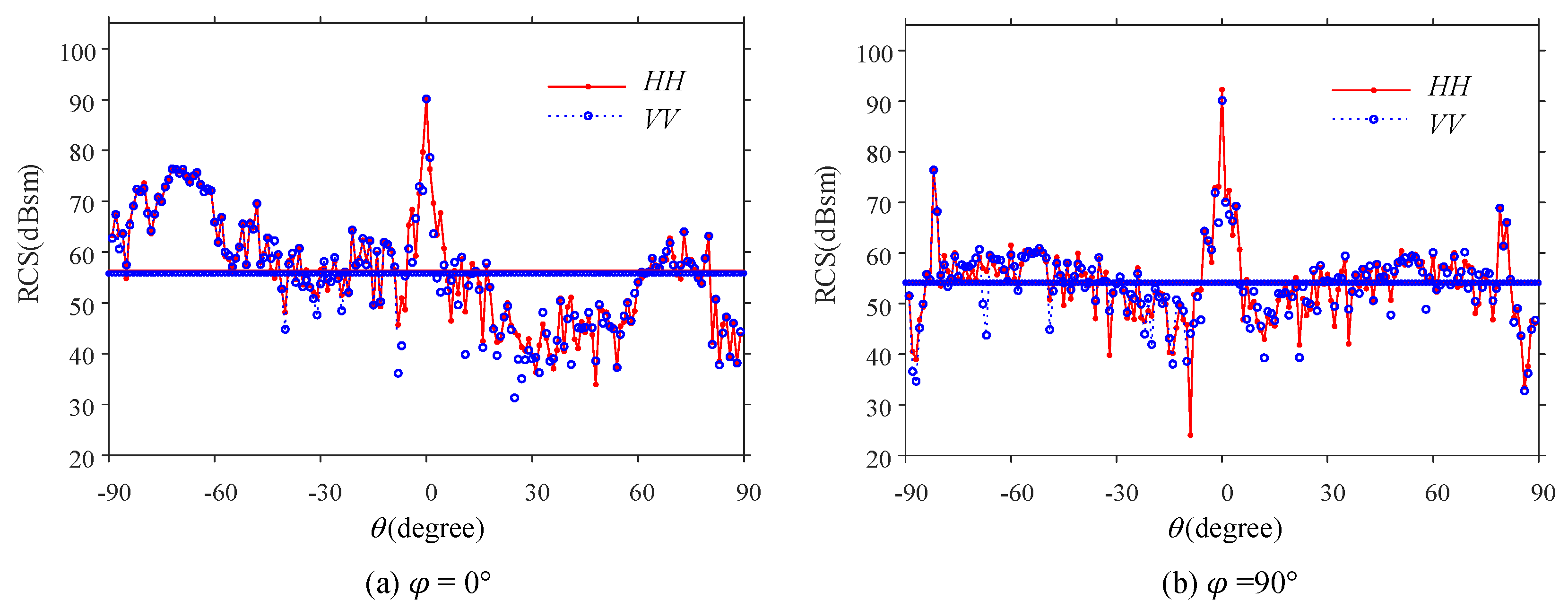
3.2.3. Effects of Different Incident Wave Polarization Modes and Frequencies on Composite Scattering
3.3. Sea Surface–Multiple Ships Scattering Model
- Sea Surface and Ship Scattering: There is no significant change with varying distances between the two ships. The scattering field’s variation with the angle exhibits good symmetry.
- Coupled Scattering: The coupled scattering of the ships is similar to that of the sea surface–single ship interaction. Near the angles of normal incidence ( 0°) and grazing incidence (90°) of the electromagnetic wave on the sea surface, the coupled scattering is weak. At other angles, numerous rays propagate between the sea surface and the ship, resulting in strong coupled scattering. Similar to the plate–cube coupled scattering, when the electromagnetic wave changes from 0° to 90°, the coupled scattering between the ship and the sea surface first increases and then decreases.
- Ship–Ship Coupling: As shown in Figure 15, the inter-ship coupling scattering values for side-by-side ships at left–right spacings of 80 m, 120 m, and 150 m are 9.6, 2.6, and −0.3, respectively. For non-side-by-side ships, the inter-ship coupling scattering values are −8.3, −17.9, and −19.8, respectively. This indicates that the coupling between the two ships weakens significantly as the left–right spacing increases. The coupling field between the ships shows a pronounced fluctuation with the angle, essentially forming a “V” shape, determined by the sea surface–ship composite model structure. At angles near grazing incidence (90°), the inter-ship coupling scattering is strong, with many rays reflected from one ship to the other. Starting from 70° and decreasing to 0°, the inter-ship coupling scattering significantly decreases, as most rays reflect off the sea surface after reaching one of the ships. At normal incidence ( 0°), the coupling scattering between the ships is the weakest near 0°, with only a few rays contributing to the scattering field due to reflections in the groove structure formed by the two ships. As the distance between the ships increases, the coupling effect diminishes at certain angles near normal incidence. For non-side-by-side ships, the coupling scattering does not exhibit good symmetry with angle changes. The coupling scattering is significantly stronger when changes from 60° to 90°, compared to when it changes from 90° to 60°, due to the ship’s structure. Electromagnetic waves incident on the left front side of the rear ship are more likely to reach the other ship, resulting in stronger coupling scattering in this range. Overall, the magnitude of the inter-ship coupling is small and has a minimal impact on the total scattering trend.
3.4. Distribution Scattering Data Construction
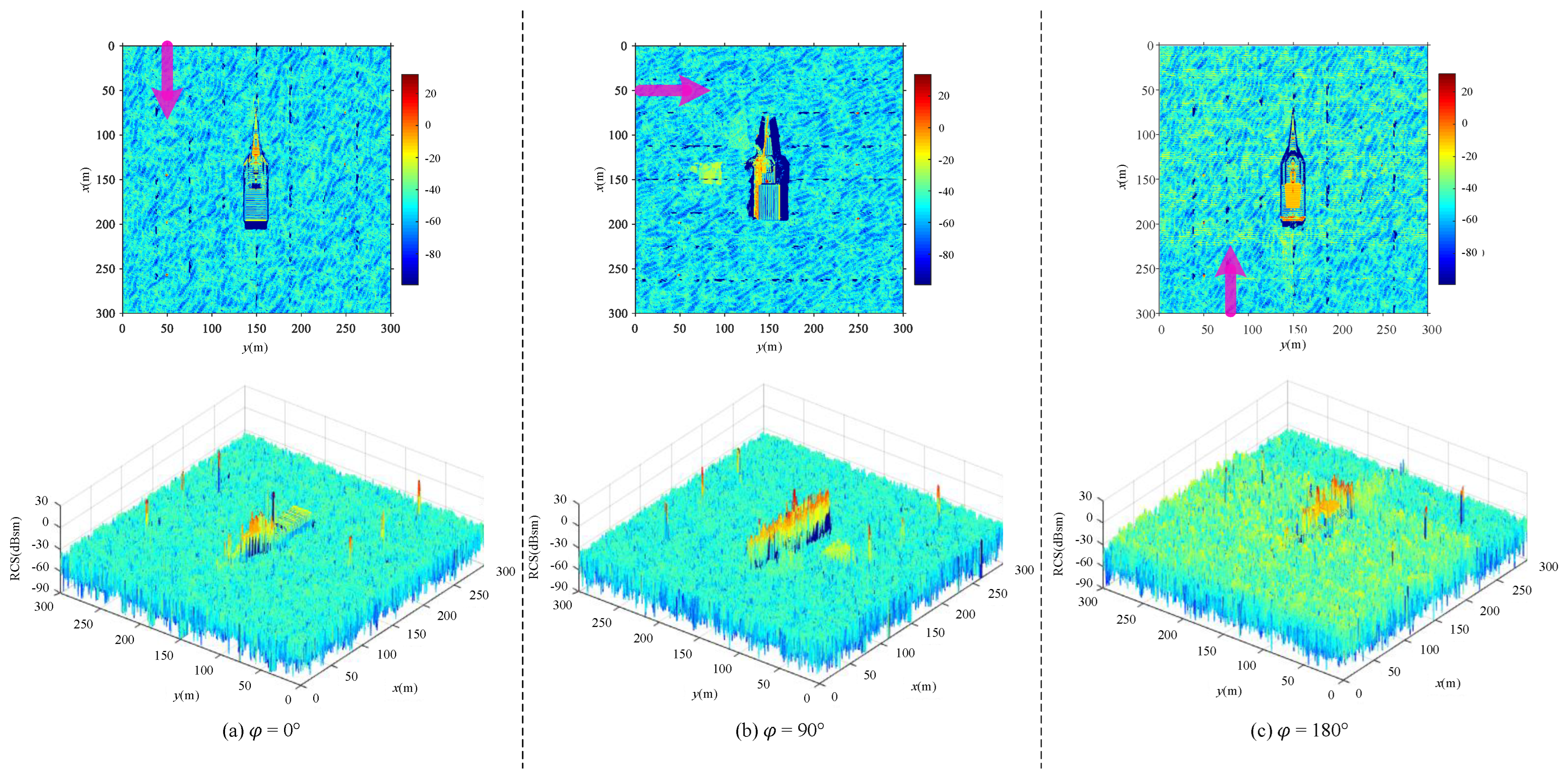
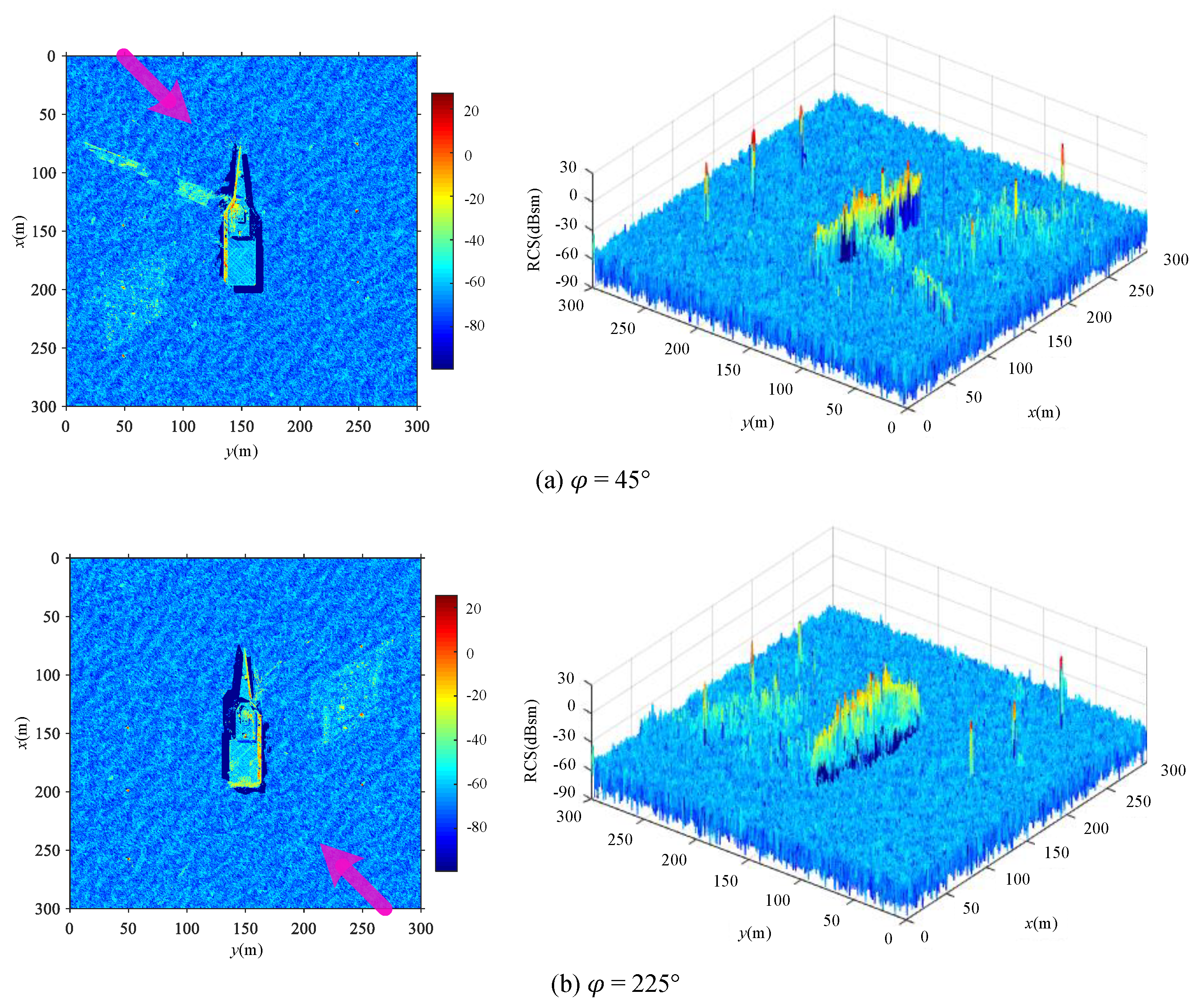
- In Figure 17a, when the incident wave approaches from the bow (the azimuth is 0°), strong scattering is observed not only at the corner reflectors but also at the ship’s front. This scattering is attributed to the intense scattering from the ship’s superstructure and the multiple scatterings caused by the dihedral angle formed between the superstructure and the front deck. Notably, there is a scattering-free dark area at the stern, resulting from the ship obstructing this region.
- In Figure 17b, when the incident wave comes from the left side (the azimuth is 90°), the quasi-dihedral structure formed between the ship’s left side and the adjacent sea surface results in strong scattering on the ship’s left side. This is primarily due to the initial strong scattering from the entire left-side hull and the subsequent multiple scatterings caused by reflections from the sea surface to the ship’s side. A relatively strong scattering area emerges on the sea surface in front of and to the left of the ship, facilitated by the quasi-dihedral structure between the ship and the sea surface that reflects rays from the ship to the sea surface. Given the hull’s inclination on the left bow, the two intense scattering zones are separate but are positioned close to the ship on the sea surface: in front of and to the left.
- As shown in Figure 17c, when the incident wave is directed at the stern (the azimuth is 180°), the stern and nearby sea surface form a quasi-dihedral structure, leading to a scattering pattern similar to that at a 90° azimuth. The line of strong scattering at the stern is mainly due to the primary scattering off the stern and multiple scatterings from rays incident on the sea surface and then reflected back to the stern. A strong scattering area appears directly behind the ship on the sea surface, caused by the quasi-dihedral structure between the ship and the sea surface, reflecting rays from the stern hull back onto the sea surface. Additionally, a significant scattering area on the middle and rear of the ship, similar to the 0° azimuth scenario, results from multiple intense scatterings created by the quasi-dihedral formed between the ship’s superstructure and the rear deck.
4. SAR Imaging Simulation and Analysis of Composite Targets on the Sea Surface
4.1. Sea Surface–Ship Composite Model SAR Imaging
4.2. Sea Surface–Ship-Corner Reflector Interference SAR Imaging
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Rizaev, I.G.; Karakuş, O.; Hogan, S.J.; Achim, A. Modeling and SAR Imaging of the Sea Surface: A Review of the State-of-the-Art with Simulations. ISPRS J. Photogramm. Remote Sens. 2022, 187, 120–140. [Google Scholar] [CrossRef]
- Budillon, A.; Schirinzi, G. Remote Monitoring of Civil Infrastructure Based on TomoSAR. Infrastructures 2022, 7, 52. [Google Scholar] [CrossRef]
- Rao, A.; Jung, J.; Silva, V.; Molinario, G.; Yun, S.H. Earthquake Building Damage Detection Based on Synthetic-Aperture-Radar Imagery and Machine Learning. Nat. Hazards Earth Syst. Sci. 2023, 23, 789–807. [Google Scholar] [CrossRef]
- Berens, P.; Walterscheid, I.; Saalmann, O.; El-Arnauti, G. High Resolution Multi-Aspect SAR Imaging of Military Vehicles. In Proceedings of the EUSAR 2021—13th European Conference on Synthetic Aperture Radar, Online, 29–31 April 2021; pp. 1–4. [Google Scholar]
- Yang, C.S.; Kim, Y.S.; Ouchi, K.; Na, J.H. Comparison with L-, C-, and X-band Real SAR Images and Simulation SAR Images of Spilled Oil on Sea Surface. In Proceedings of the 2009 IEEE International Geoscience and Remote Sensing Symposium, Cape Town, South Africa, 12–17 July 2009; Volume 4, pp. IV-673–IV-676. [Google Scholar] [CrossRef]
- Oliver, C.J. Synthetic-Aperture Radar Imaging. J. Phys. D Appl. Phys. 1989, 22, 871. [Google Scholar] [CrossRef]
- Agrawal, S.; Khairnar, G.B. A Comparative Assessment of Remote Sensing Imaging Techniques: Optical, Sar and Lidar. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, 42, 1–6. [Google Scholar] [CrossRef]
- Diao, G.; Xu, X.; Hong, N.; Lu, J. Synthetic Aperture Radar Signal Simulation of Ships on Sea Surface. J. Syst. Simul. 2020, 27, 1989–1996. [Google Scholar]
- Jiang, W.Q.; Wang, L.Y.; Li, X.Z.; Liu, G.; Zhang, M. Simulation of a Wideband Radar Echo of a Target on a Dynamic Sea Surface. Remote Sens. 2021, 13, 3186. [Google Scholar] [CrossRef]
- Li, Q.; Zhang, Y.; Wang, Y.; Bai, Y.; Zhang, Y.; Li, X. Numerical Simulation of SAR Image for Sea Surface. Remote Sens. 2022, 14, 439. [Google Scholar] [CrossRef]
- Li, X.M.; Qin, T.; Wu, K. Retrieval of Sea Surface Wind Speed from Spaceborne SAR over the Arctic Marginal Ice Zone with a Neural Network. Remote Sens. 2020, 12, 3291. [Google Scholar] [CrossRef]
- Elyouncha, A.; Eriksson, L.E.B.; Johnsen, H. Direct Comparison of Sea Surface Velocity Estimated from Sentinel-1 and TanDEM-x SAR Data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2022, 15, 2425–2436. [Google Scholar] [CrossRef]
- Holthuijsen, L. Waves in Oceanic and Coastal Waters; Cambridge University Press: Cambridge, UK, 2010. [Google Scholar]
- Pierson, W.J., Jr.; Moskowitz, L. A Proposed Spectral Form for Fully Developed Wind Seas Based on the Similarity Theory of SA Kitaigorodskii. J. Geophys. Res. 1964, 69, 5181–5190. [Google Scholar] [CrossRef]
- Chen, X.; Zhou, L.; Zhou, M.; Shao, A.; Ren, K.; Chen, Q.; Gu, G.; Wan, M. Infrared Ocean Image Simulation Algorithm Based on Pierson–Moskowitz Spectrum and Bidirectional Reflectance Distribution Function. Photonics 2022, 9, 166. [Google Scholar] [CrossRef]
- Kudryavtsev, V.; Hauser, D.; Caudal, G.; Chapron, B. A Semiempirical Model of the Normalized Radar Cross-Section of the Sea Surface 1. Background Model. J. Geophys. Res. Ocean. 2003, 108, FET 2-1–FET 2-24. [Google Scholar] [CrossRef]
- Plant, W.J. Bragg Scattering of Electromagnetic Waves from the Air/Sea Interface. In Surface Waves and Fluxes: Volume II—Remote Sensing; Springer: Dordrecht, The Netherlands, 1990; pp. 41–108. [Google Scholar]
- Barman, K.K.; Chanda, A.; Tsai, C.C.; Hsu, T.W. Bragg Scattering of Gravity Waves by a Sea Bed of Varying Depth in the Presence of Uniform Current Covered by a Floating Membrane. Phys. Fluids 2024, 36, 012118. [Google Scholar] [CrossRef]
- Luo, W.; Yang, Y.; Ni, Z. Iterated Method for Multiple Electromagnetic Wave Scattering of Two-Dimensional Sea Surface. In Proceedings of the 2019 IEEE International Conference on Computational Electromagnetics (ICCEM), Shanghai, China, 20–22 March 2019; pp. 1–3. [Google Scholar] [CrossRef]
- Huang, Y.; Chen, P. Research on Numerical Methods of Electromagnetic Scattering from Rough Surfaces. Master’s Thesis, Huazhong University of Science and Technology, Wuhan, China, 2008. [Google Scholar]
- Zhang, X.Y.; Sheng, X.Q. An Efficient Hybrid KA-MoM Method for Scattering from Objects above a Rough Surface. In Proceedings of the IEEE 2008 Asia-Pacific Microwave Conference, Hong Kong, China, 16–28 December 2008; pp. 1–4. [Google Scholar]
- Dong, C.L.; Guo, L.X.; Meng, X. An Accelerated Algorithm Based on GO-PO/PTD and CWMFSM for EM Scattering from the Ship over a Sea Surface and SAR Image Formation. IEEE Trans. Antennas Propag. 2020, 68, 3934–3944. [Google Scholar] [CrossRef]
- Jianxiong, Z.; Zhiguang, S.; Xiao, C.; Qiang, F. Automatic Target Recognition of SAR Images Based on Global Scattering Center Model. IEEE Trans. Geosci. Remote Sens. 2011, 49, 3713–3729. [Google Scholar] [CrossRef]
- He, Y.; He, S.Y.; Zhang, Y.H.; Wen, G.J.; Yu, D.F.; Zhu, G.Q. A Forward Approach to Establish Parametric Scattering Center Models for Known Complex Radar Targets Applied to SAR ATR. IEEE Trans. Antennas Propag. 2014, 62, 6192–6205. [Google Scholar] [CrossRef]
- Xing, X.Y.; Yan, H.; Yin, H.C.; Huo, C.Y. A Bistatic Attributed Scattering Center Model for SAR ATR. IEEE Trans. Antennas Propag. 2021, 69, 7855–7866. [Google Scholar] [CrossRef]
- Gao, Y.; Akbar, M.F.; Jawad, G.N. Stabilized and Fast Method for Compressive-Sensing-Based Method of Moments. IEEE Antennas Wirel. Propag. Lett. 2023, 22, 2915–2919. [Google Scholar] [CrossRef]
- Limkilde, A.; Borries, O.; Meincke, P.; Jørgensen, E. Full-Wave Monostatic Radar Cross Section Using the Multilevel Fast Multipole Method. In Proceedings of the 2023 17th European Conference on Antennas and Propagation (EuCAP), Florence, Italy, 26–31 March 2023; pp. 1–5. [Google Scholar] [CrossRef]
- Balanis, C.A. Advanced Engineering Electromagnetics; John Wiley & Sons: Hoboken, NJ, USA, 2012. [Google Scholar]
- Shah, M.A.; Tokgoz, C.; Salau, B.A. Radar Cross Section Prediction Using Iterative Physical Optics with Physical Theory of Diffraction. IEEE Trans. Antennas Propag. 2022, 70, 4683–4690. [Google Scholar] [CrossRef]
- Huo, J.; Xu, L.; Shi, X.; Yang, Z. An Accelerated PO for EM Scattering from Electrically Large Targets. IEEE Antennas Wirel. Propag. Lett. 2021, 20, 2300–2304. [Google Scholar] [CrossRef]
- Dong, C.; Guo, L.; Meng, X.; Li, H. An Improved GO-PO/PTD Hybrid Method for EM Scattering From Electrically Large Complex Targets. IEEE Trans. Antennas Propag. 2022, 70, 12130–12138. [Google Scholar] [CrossRef]
- Niu, X.; He, H.; Jin, M. Application of Ray-Tracing Method in Electromagnetic Numerical Simulation Algorithm. In Proceedings of the 2021 International Applied Computational Electromagnetics Society (ACES-China) Symposium, Chengdu, China, 28–31 July 2021; pp. 1–2. [Google Scholar] [CrossRef]
- Huo, J.; Xu, L.; Shi, X.; Yang, Z. An Accelerated Shooting and Bouncing Ray Method Based on GPU and Virtual Ray Tube for Fast RCS Prediction. IEEE Antennas Wirel. Propag. Lett. 2021, 20, 1839–1843. [Google Scholar] [CrossRef]
- Wu, T.D.; Hsieh, Y.C.; Liou, H.W.; Yen, Y.; Lee, H.W.; Wang, H.F. SAR Image Simulation Based on SBR/PO Method for Polarimetric Feature Analysis. In Proceedings of the 2020 International Workshop on Electromagnetics: Applications and Student Innovation Competition (iWEM), Makung, Taiwan, 26–28 August 2020; pp. 1–2. [Google Scholar] [CrossRef]
- Chang, Z.; Han, F.; Sun, Z.; Gao, Z.; Wang, L. Three-Dimensional Dynamic Sea Surface Modeling Based on Ocean Wave Spectrum. Acta Oceanol. Sin. 2021, 40, 38–48. [Google Scholar] [CrossRef]
- Sun, L.; Yang, X.Q.; Bu, S.X.; Zheng, W.T.; Ma, Y.X.; Jiao, Z.L. Analysis of FPSO Motion Response under Different Wave Spectra. J. Mar. Sci. Eng. 2023, 11, 1467. [Google Scholar] [CrossRef]
- Meng, H.T. Acceleration of Asymptotic Computational Electromagnetics Physical Optics—Shooting and Bouncing Ray (PO-SBR) Method Using CUDA. Ph.D. Thesis, University of Illinois at Urbana-Champaign, Champaign, IL, USA, 2011. [Google Scholar]
- Zhou, T.; Cai, Q.M.; Cao, X.; Jiang, W.; Zhu, Y.; Zhu, Y.; Fan, J. GPU-accelerated HO-SIE-DDM Using NVIDIA CUDA for Analysis of Multiscale Problems. In Proceedings of the 2022 Asia-Pacific International Symposium on Electromagnetic Compatibility (APEMC), Beijing, China, 8–11 May 2022; pp. 201–203. [Google Scholar] [CrossRef]
- Chi, Z.; Guo, X. CUDA Acceleration for Solving Three-Dimension Time-Dependent Parabolic Partial Differential Equation. In Proceedings of the 2021 2nd International Conference on Intelligent Computing and Human-Computer Interaction (ICHCI), Shenyang, China, 17–19 November 2021; pp. 99–103. [Google Scholar] [CrossRef]
- Eaves, J.; Reedy, E. Principles of Modern Radar; Springer Science & Business Media: New York, NY, USA, 2012. [Google Scholar]
- Chen, K.S. Principles of Synthetic Aperture Radar Imaging: A System Simulation Approach; CRC Press: Boca Raton, FL, USA, 2016. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SBR | SBR-PO | Reduction Ratio | |
|---|---|---|---|
| Number of ray tubes | 21.675 | 1.139 | 94.7% |
| CPU time(s) | 56,255.4 | 2537.9 | 95.5% |
| GPU time(s) | 167.1 | 19.1 | 88.6% |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Frequency center | 5 GHz | Pulse width | 3.5 μs |
| Signal bandwidth | 150 MHz | Antenna Size | 2 m |
| Platform speed | 100 m/s | Pulse repetition frequency | 250 Hz |
| Slant range | 10 km |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Frequency center | 5 GHz | Pulse width | 3.5 μs |
| Signal bandwidth | 150 MHz | Antenna Size | 2 m |
| Platform speed | 100 m/s | Pulse repetition frequency | 250 Hz |
| Slant range | 7.5 km |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
He, Y.; Xu, L.; Huo, J.; Zhou, H.; Shi, X. A Synthetic Aperture Radar Imaging Simulation Method for Sea Surface Scenes Combined with Electromagnetic Scattering Characteristics. Remote Sens. 2024, 16, 3335. https://doi.org/10.3390/rs16173335
He Y, Xu L, Huo J, Zhou H, Shi X. A Synthetic Aperture Radar Imaging Simulation Method for Sea Surface Scenes Combined with Electromagnetic Scattering Characteristics. Remote Sensing. 2024; 16(17):3335. https://doi.org/10.3390/rs16173335
Chicago/Turabian StyleHe, Yao, Le Xu, Jincong Huo, Huaji Zhou, and Xiaowei Shi. 2024. "A Synthetic Aperture Radar Imaging Simulation Method for Sea Surface Scenes Combined with Electromagnetic Scattering Characteristics" Remote Sensing 16, no. 17: 3335. https://doi.org/10.3390/rs16173335
APA StyleHe, Y., Xu, L., Huo, J., Zhou, H., & Shi, X. (2024). A Synthetic Aperture Radar Imaging Simulation Method for Sea Surface Scenes Combined with Electromagnetic Scattering Characteristics. Remote Sensing, 16(17), 3335. https://doi.org/10.3390/rs16173335