
An Enhanced Collaborative Localization Method Based on Belief Propagation Aided by 3D Terrain Modelling


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Cooperative Navigation Scheme with Relative Visibility Analysis
3. Air–Ground NLOS Identification Method Aided by 3D Terrain Modelling
3.1. Air–Ground Member-Ray Terrain Intersection Detection Methods
3.2. Air–Ground NLOS Identification Based on Visible Vector Masking
4. Enhanced Collaborative Localization Based on Belief Propagation
4.1. Edge Probability Model for Air–Ground Swarm Cooperative Navigation
- Let ;
- Filter gain ;
- State estimation equation ;
- Estimating the mean square error equation ;
4.2. Belief Propagation for Heterogeneous Information
4.3. Interactive Cooperative Localization Error Correction
5. Validation Results and Analysis
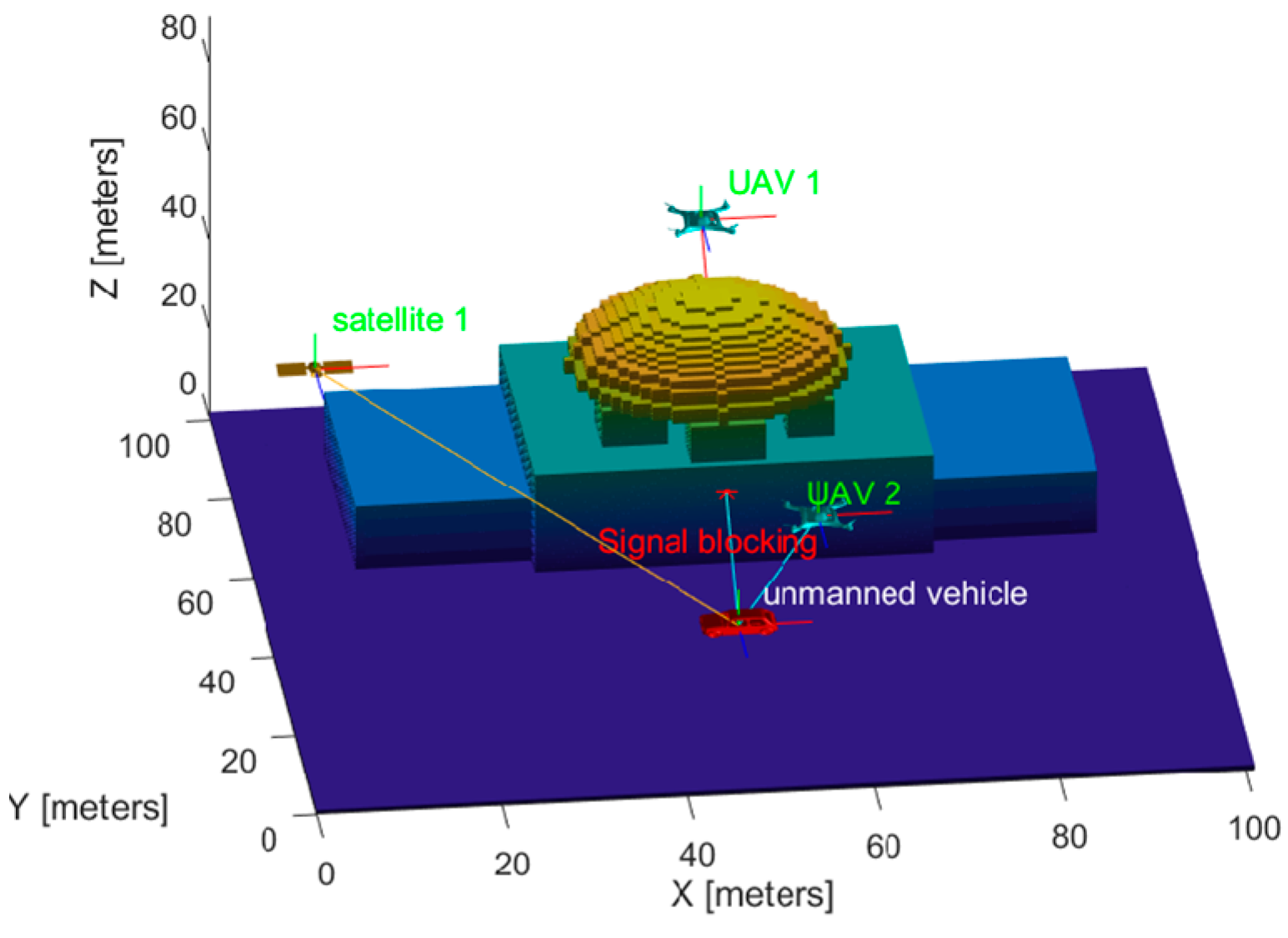
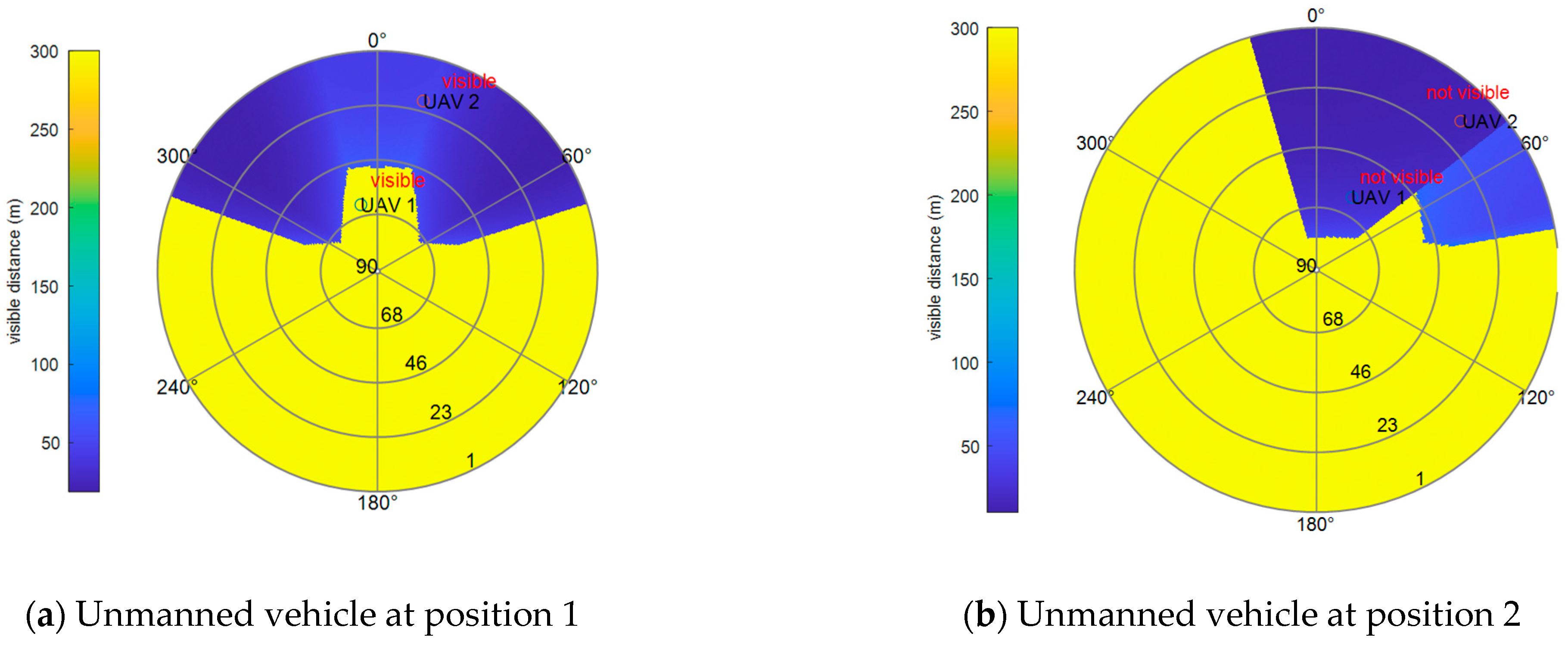
5.1. Air–Ground NLOS Identification Based on Ray Intersection Detection
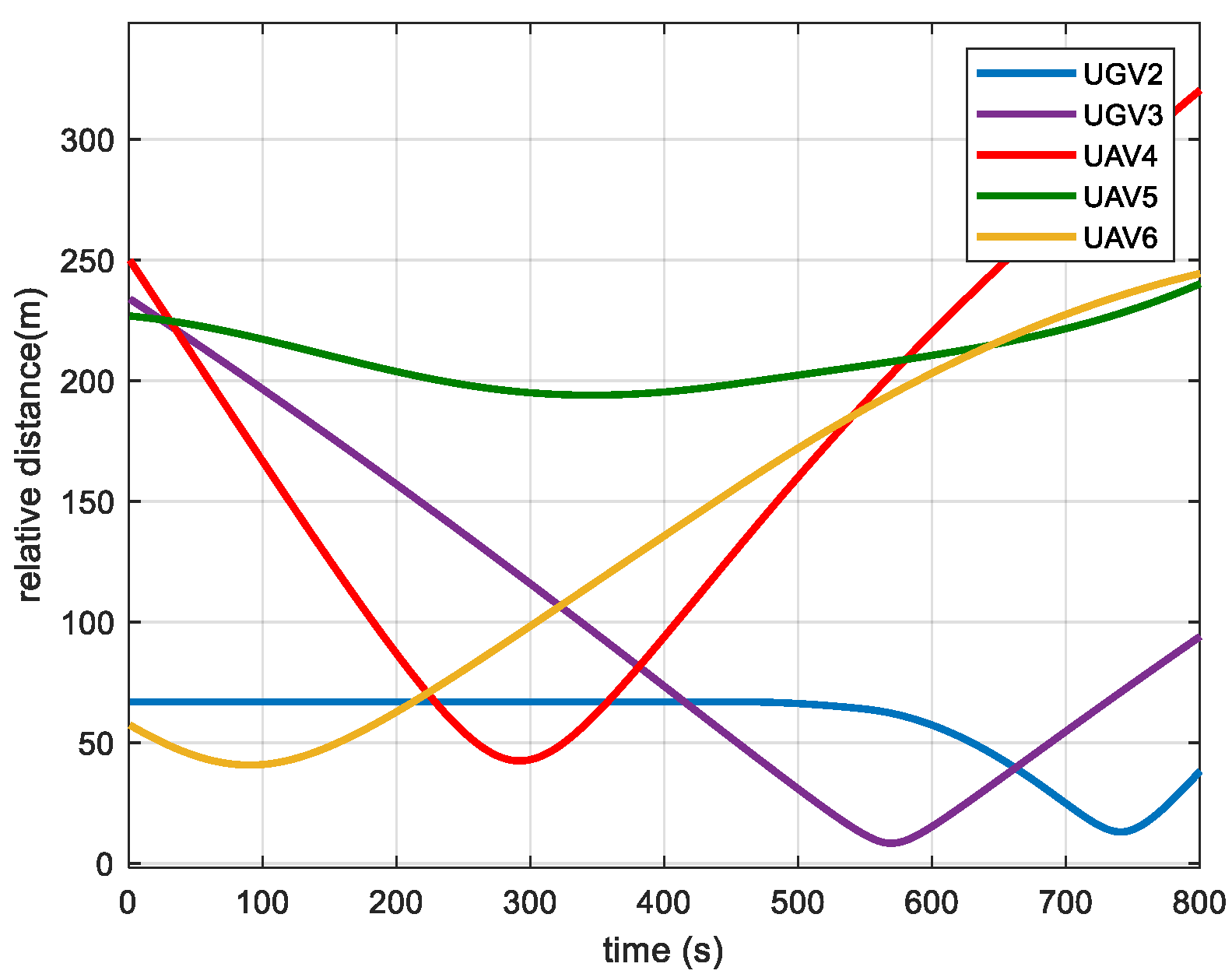
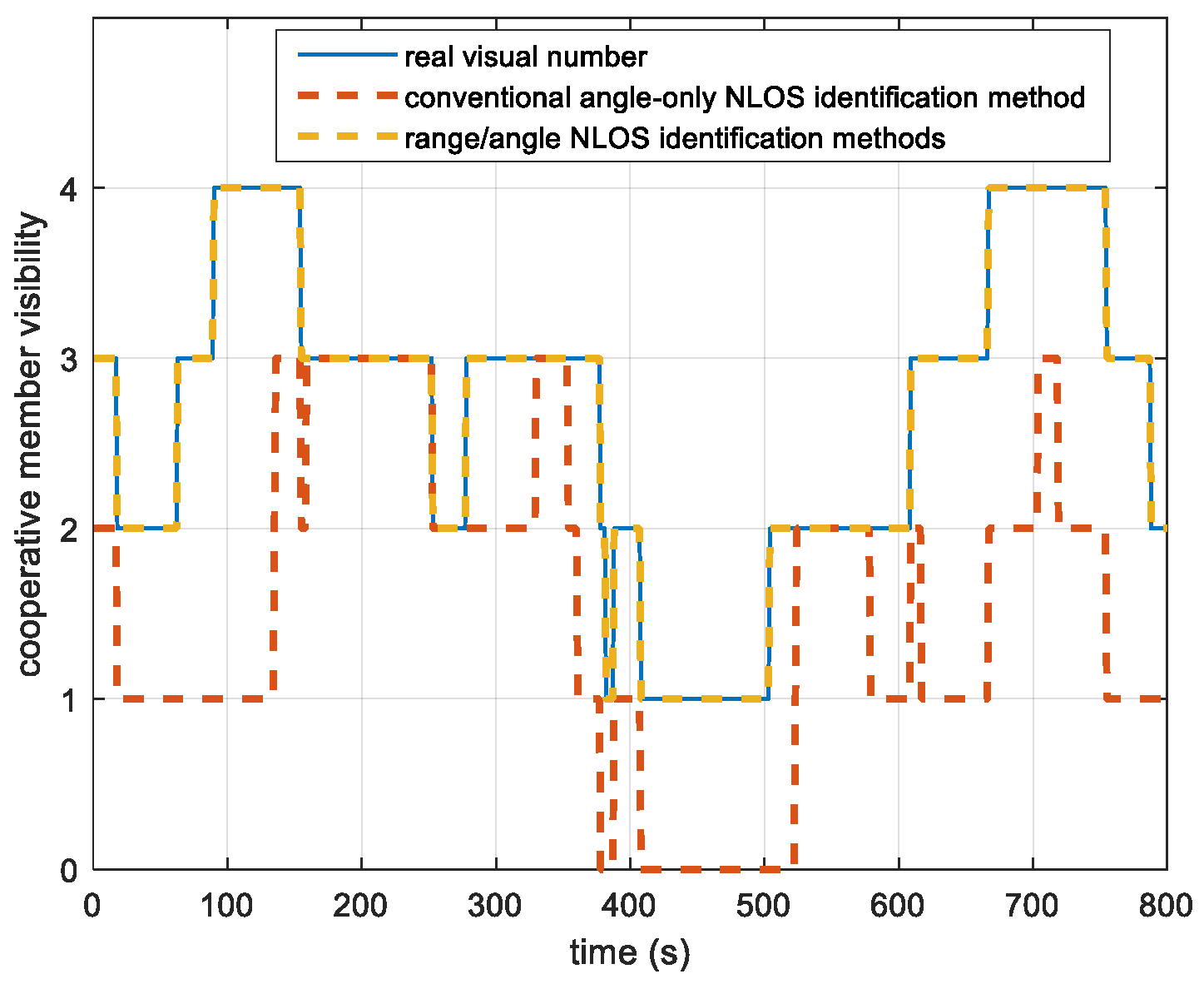
5.2. Performance Analysis of Air–Ground Swarms’ Cooperative Localization
6. Discussion
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhang, J.; Liu, R.; Yin, K.; Wang, Z.; Gui, M.; Chen, S. Intelligent Collaborative Localization Among Air-Ground Robots for Industrial Environment Perception. IEEE Trans. Ind. Electron. 2019, 66, 9673–9681. [Google Scholar] [CrossRef]
- Zhang, M.; Li, S.; Li, B. An air-ground cooperative scheduling model considering traffic environment and helicopter performance. Comput. Ind. Eng. 2021, 158, 107458. [Google Scholar] [CrossRef]
- Shi, C.; Xiong, Z.; Chen, M.; Wang, R.; Xiong, J. Cooperative Navigation for Heterogeneous Air-Ground Vehicles Based on Interoperation Strategy. Remote Sens. 2023, 15, 2006. [Google Scholar] [CrossRef]
- Wang, R.; Xiong, Z.; Liu, J. Collaborative Localization-Based Resilient Navigation Fusion. In Resilient Fusion Navigation Techniques: Collaboration in Swarm; Springer Nature: Singapore, 2023; pp. 65–92. [Google Scholar]
- Zhang, F.; Wu, X.; Ma, P. Consistent Extended Kalman Filter-Based Cooperative Localization of Multiple Autonomous Underwater Vehicles. Sensors 2022, 22, 4563. [Google Scholar] [CrossRef] [PubMed]
- Fascista, A.; Ciccarese, G.; Coluccia, A.; Ricci, G. Angle of arrival-based cooperative positioning for smart vehicles. IEEE Trans. Intell. Transp. Syst. 2017, 19, 2880–2892. [Google Scholar] [CrossRef]
- Wymeersch, H.; Lien, J.; Win, M.Z. Cooperative localization in wireless networks. Proc. IEEE 2009, 97, 427–450. [Google Scholar] [CrossRef]
- Meyer, F.; Etzlinger, B.; Hlawatsch, F.; Springer, A. A distributed particle-based belief propagation algorithm for cooperative simultaneous localization and synchronization. In Proceedings of the 2013 Asilomar Conference on Signals, Systems and Computers, Pacific Grove, CA, USA, 3–6 November 2013; pp. 527–531. [Google Scholar]
- Meyer, F.; Hlinka, O.; Hlawatsch, F. Sigma point belief propagation. IEEE Signal Process. Lett. 2013, 21, 145–149. [Google Scholar] [CrossRef]
- García-Fernández, Á.F.; Svensson, L.; Särkkä, S. Cooperative localization using posterior linearization belief propagation. IEEE Trans. Veh. Technol. 2017, 67, 832–836. [Google Scholar] [CrossRef]
- Chen, H.; Xian-Bo, W.; Liu, J.; Wang, J.; Ye, W. Collaborative Multiple UAVs Navigation With GPS/INS/UWB Jammers Using Sigma Point Belief Propagation. IEEE Access. 2022, 8, 193695–193707. [Google Scholar] [CrossRef]
- Yuan, Y.; Shen, F.; Li, X. GPS multipath and NLOS mitigation for relative positioning in urban environments. Aerosp. Sci. Technol. 2020, 107, 106315. [Google Scholar] [CrossRef]
- Barral, V.; Escudero, C.J.; García-Naya, J.A.; Maneiro-Catoira, R. NLOS identification and mitigation using low-cost UWB devices. Sensors 2019, 19, 3464. [Google Scholar] [CrossRef]
- Groves, P.D. It’s time for 3D terrain modellingping–aided GNSS. Inside GNSS Mag. 2016, 50–56. [Google Scholar]
- Ng, H.F.; Zhang, G.; Luo, Y.; Hsu, L.T. Urban positioning: 3D terrain modellingping-aided GNSS using dual-frequency pseudorange measurements from smartphones. Navigation 2021, 68, 727–749. [Google Scholar] [CrossRef]
- Zhong, Q.; Groves, P.D. Multi-epoch 3D-mapping-aided positioning using bayesian filtering techniques. NAVIGATION J. Inst. Navig. 2022, 69, navi.515. [Google Scholar] [CrossRef]
- Saona-Vázquez, C.; Navazo, I.; Brunet, P. The visibility octree: A data structure for 3D navigation. Comput. Graph. 1999, 23, 635–643. [Google Scholar] [CrossRef]
- Chen, Y.; Li, Y.; Han, C.; Yu, Z.; Wang, G. Channel Measurement and Ray-Tracing-Statistical Hybrid Modeling for Low-Terahertz Indoor Communications. IEEE Trans. Wirel. Commun. 2021, 20, 8163–8176. [Google Scholar] [CrossRef]
- Adjrad, M.; Groves, P.D. Intelligent Urban Positioning: Integration of Shadow Matching with 3D-Mapping-Aided GNSS Ranging. J. Navig. 2018, 71, 1–20. [Google Scholar] [CrossRef]
- Kubelka, V.; Dandurand, P.; Babin, P.; Giguère, P.; Pomerleau, F. Radio propagation models for differential GNSS based on dense point clouds. J. Field Robot. 2020, 37, 1347–1362. [Google Scholar] [CrossRef]
- Niijima, S.; Sasaki, Y.; Mizoguchi, H. Real-time autonomous navigation of an electric wheelchair in large-scale urban area with 3D terrain modelling. Adv. Robot. 2019, 33, 1006–1018. [Google Scholar] [CrossRef]
- Choi, H.; Oh, J.; Chung, J.; Alexandropoulos, G.C.; Choi, J. WiThRay: A Versatile Ray-Tracing Simulator for Smart Wireless Environments. IEEE Access 2023, 11, 56822–56845. [Google Scholar] [CrossRef]
- Girindran, R.; Boyd, D.S.; Rosser, J.; Vijayan, D.; Long, G.; Robinson, D. On the reliable generation of 3D city models from open data. Urban Sci. 2020, 4, 47. [Google Scholar] [CrossRef]
- Haala, N.; Peter, M.; Kremer, J.; Hunter, G. Mobile LiDAR mapping for 3D point cloud collection in urban areas—A performance test. Int. Arch. Photogram. Remote Sens. Spat. Inf. Sci. 2008, 37, 1119–1127. [Google Scholar]
- Hornung, A.; Wurm, K.M.; Bennewitz, M.; Stachniss, C.; Burgard, W. OctoMap: An efficient probabilistic 3D terrain modellingping framework based on octrees. Auton. Robot. 2013, 34, 189–206. [Google Scholar] [CrossRef]
- Cao, Y.; Yang, S.; Feng, Z.; Wang, L.; Hanzo, L. Distributed Spatio-Temporal Information Based Cooperative 3D Positioning in GNSS-Denied Environments. IEEE Trans. Veh. Technol. 2023, 72, 1285–1290. [Google Scholar] [CrossRef]
- Pedro, V.; Eloisa, D.; Marco, C. Morphological Operations on Unorganized Point Clouds Using Octree Graphs. ACM J. Comput. Cult. Herit. (JOCCH) 2023, 16, 12. [Google Scholar]
- Revelles, J.; Urena, C.; Lastra, M. An Efficient Parametric Algorithm for Octree Traversal. J. WSCG 2000, 8, 212–219. [Google Scholar]
- Huang, M.; Zhou, Y.; Wang, Y.; Liu, Z. An efficient adaptive space partitioning algorithm for electromagnetic scattering calculation of complex 3D models. J. Syst. Eng. Electron. 2021, 32, 1071–1082. [Google Scholar]
- García-Fernández, Á.F.; Svensson, L.; Morelande, M.R.; Särkkä, S. Posterior linearization filter: Principles and implementation using sigma points. IEEE Trans. Signal Process. 2015, 63, 5561–5573. [Google Scholar] [CrossRef]
















Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, R.; Zhao, W.; Xiong, Z.; Chen, X. An Enhanced Collaborative Localization Method Based on Belief Propagation Aided by 3D Terrain Modelling. Remote Sens. 2024, 16, 3042. https://doi.org/10.3390/rs16163042
Wang R, Zhao W, Xiong Z, Chen X. An Enhanced Collaborative Localization Method Based on Belief Propagation Aided by 3D Terrain Modelling. Remote Sensing. 2024; 16(16):3042. https://doi.org/10.3390/rs16163042
Chicago/Turabian StyleWang, Rong, Weicheng Zhao, Zhi Xiong, and Xiaoyi Chen. 2024. "An Enhanced Collaborative Localization Method Based on Belief Propagation Aided by 3D Terrain Modelling" Remote Sensing 16, no. 16: 3042. https://doi.org/10.3390/rs16163042
APA StyleWang, R., Zhao, W., Xiong, Z., & Chen, X. (2024). An Enhanced Collaborative Localization Method Based on Belief Propagation Aided by 3D Terrain Modelling. Remote Sensing, 16(16), 3042. https://doi.org/10.3390/rs16163042