
SPT-UNet: A Superpixel-Level Feature Fusion Network for Water Extraction from SAR Imagery

 , , , ,
, , , ,
Abstract
1. Introduction
- (1)
- Predefined patch sizes (e.g., 16 × 16) are used for image partition, resulting in the issue of edge serration in water bodies extraction due to the heterogeneity within each patch;
- (2)
- The transformer-based models lack specific inductive biases, such as translation invariance and local correlation, which makes the model heavily rely on the dataset for accurate extraction of water bodies.
- (1)
- To mitigate the issue of edge serration in water body extraction based on transformer-based models, we propose to use adaptive superpixels instead of regular patches;
- (2)
- To alleviate the dependence of transformer-based models on data, we introduce the C-MLP module, which imposes prior constraints on the SPT by utilizing a normalized adjacency matrix between superpixels;
- (3)
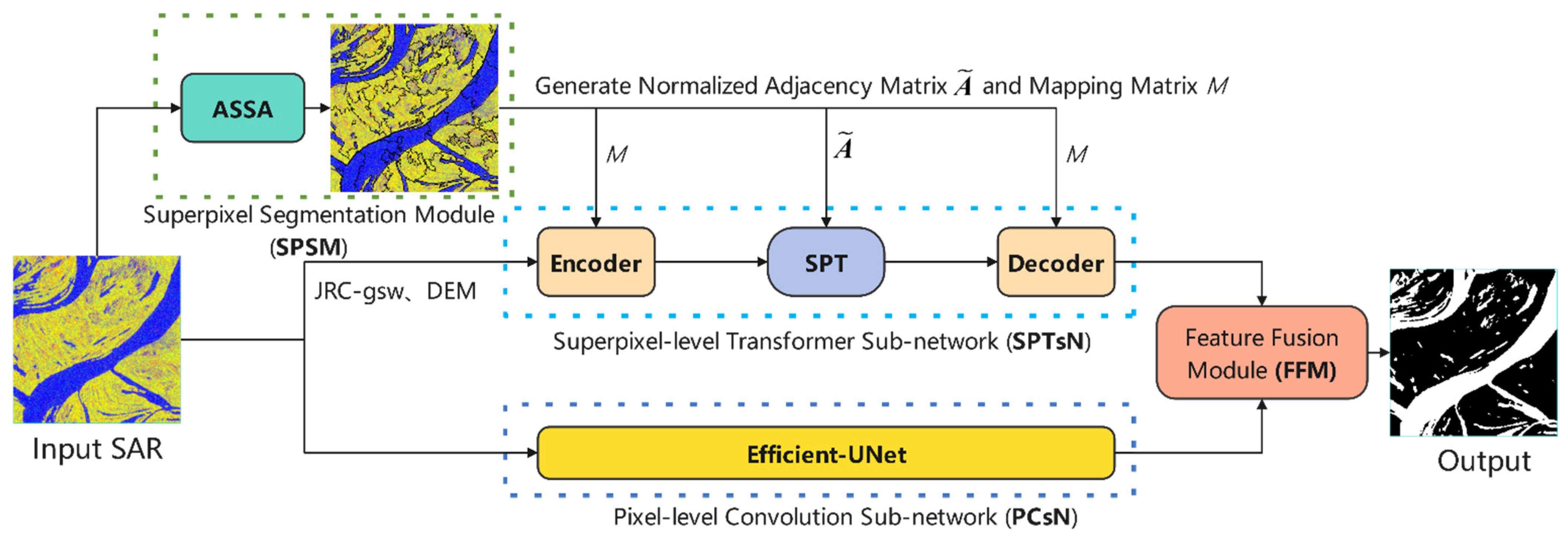
- Combining a CNN and SPT, we propose the SPT-UNet, which facilitates simultaneous learning on both the pixel and superpixel-level semantic features of water bodies. The experiments on the public dataset demonstrate that SPT-UNet performs competitively compared to other state-of-the-art extraction networks, which can partially alleviate the interference caused by terrain-induced shadows and water-like surfaces.
2. Proposed Method
| Algorithm 1: Training procedure for the SPT-UNet framework |
| Input: SAR dataset , DEM dataset , JRC-gsw dataset , Ground Label , The number of Superpixels Z, the hyperparameter a. Output: Water bodies extraction results E . |
| for i = 1; i < N; i++ do Randomly batch sample Ii from Zs, Batch sample Di consistent with Ii from Zd, Batch sample Ji consistent with Ii from Zj, Batch sample Li consistent with Ii from L. // Stage 1 SPSM // Stage 2 SPTsN // Stage 3 PCsN F = PCsN (Ii) // Stage 4 FFM Ei = FFM (F, V*) // Calculate the segmentation loss end for |
2.1. SPSM
2.2. SPTsN
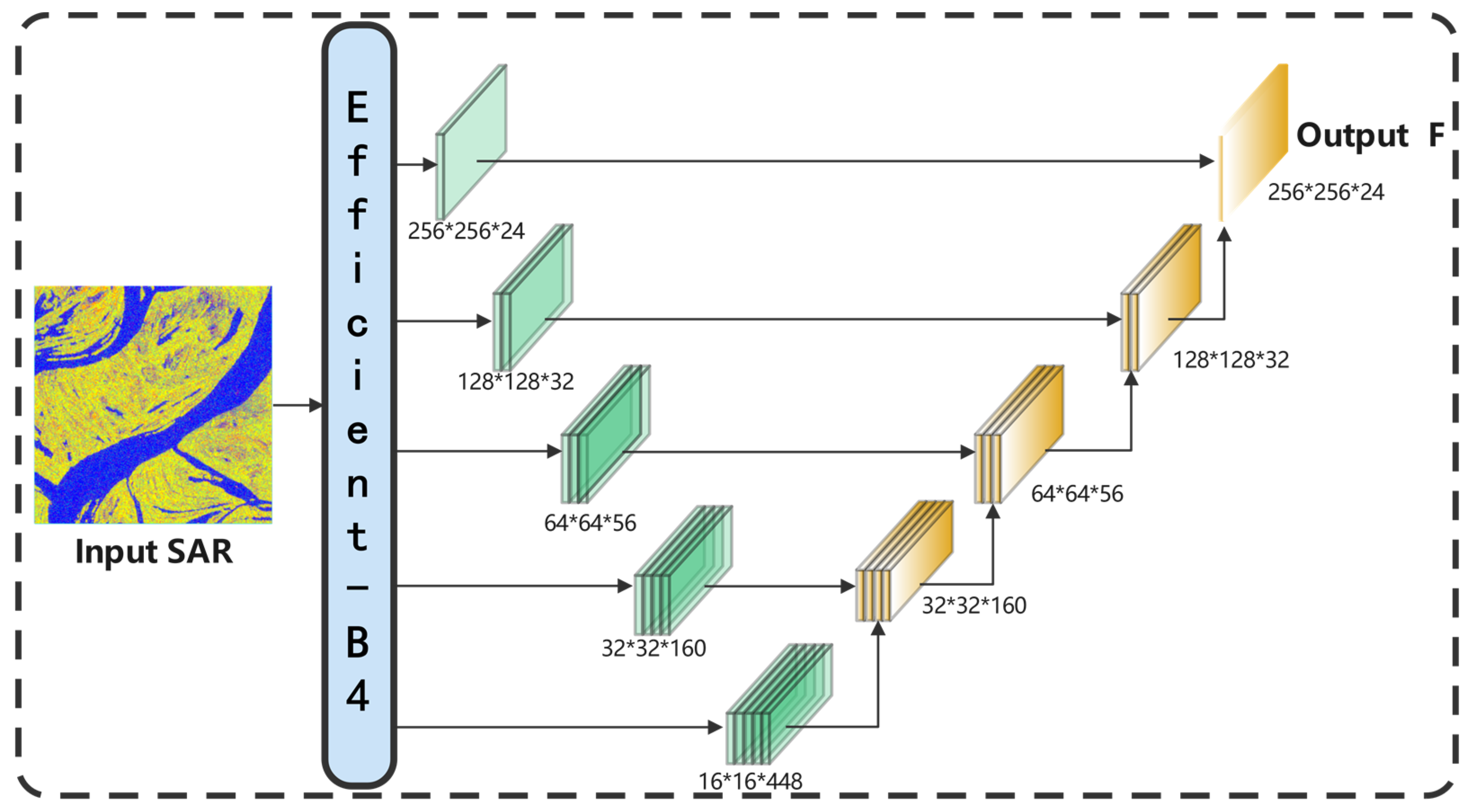
2.3. PCsN
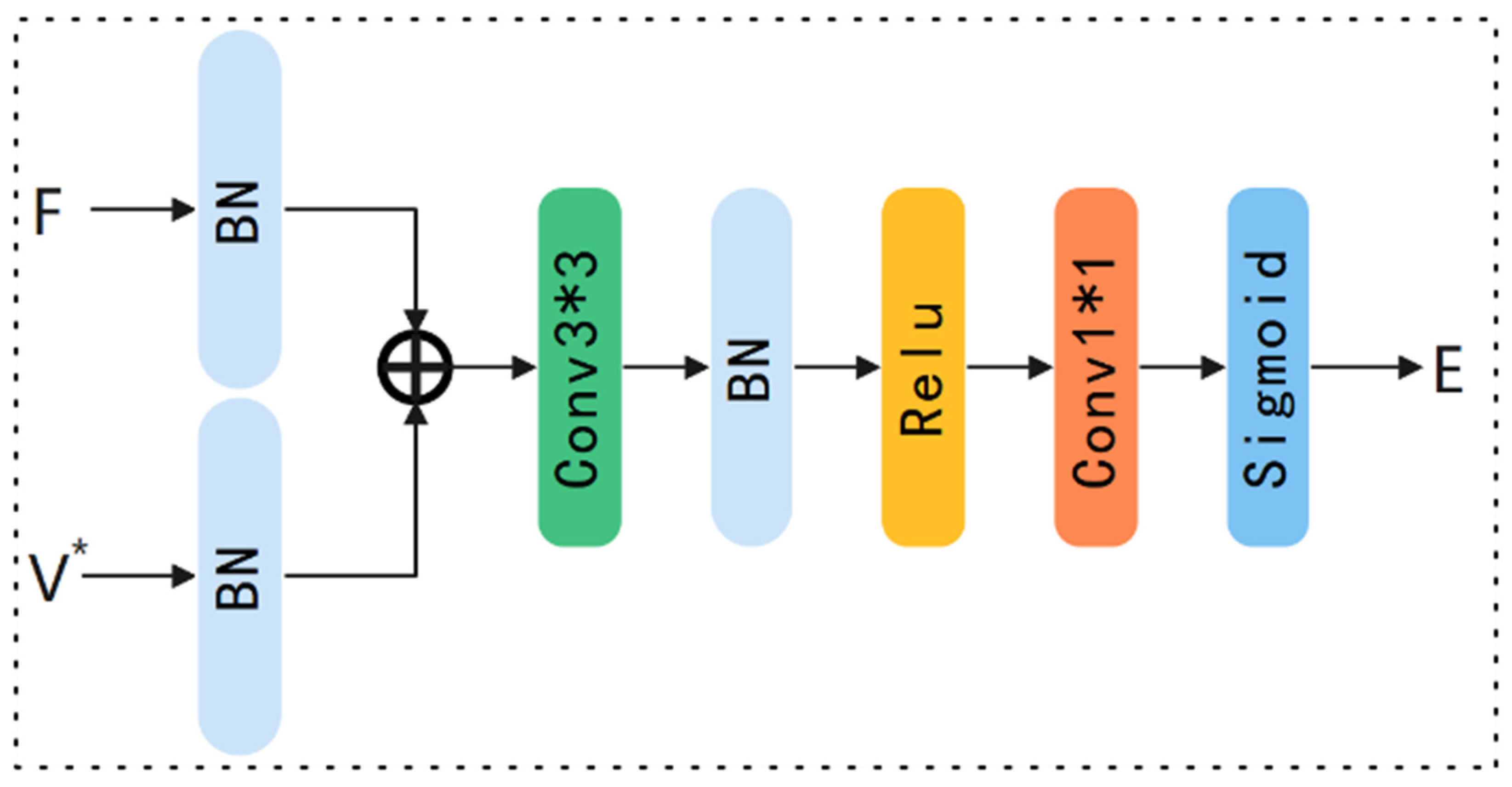
2.4. FFM
2.5. Hybrid Weighted Loss
3. Dataset and Experimental Setup
3.1. Data Description
3.2. Experimental Settings
3.3. Evaluation Indices
4. Experiment Results
4.1. Comparison of Extraction Performance
4.2. Ablation Study
5. Discussion
5.1. Influence of Segmentation Scale
5.2. Impact of a
5.3. Impact of Additional Data
5.4. Impact of Depth in SPT
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Dong, Z.; Liang, Z.; Wang, G.; Amankwah, S.O.Y.; Feng, D.; Wei, X.; Duan, Z. Mapping inundation extents in Poyang Lake area using Sentinel-1 data and transformer-based change detection method. J. Hydrol. 2023, 620, 129455. [Google Scholar] [CrossRef]
- Qiu, J.; Cao, B.; Park, E.; Yang, X.; Zhang, W.; Tarolli, P. Flood Monitoring in Rural Areas of the Pearl River Basin (China) Using Sentinel-1 SAR. Remote Sens. 2021, 13, 1384. [Google Scholar] [CrossRef]
- Proud, S.R.; Fensholt, R.; Rasmussen, L.V.; Sandholt, I. Rapid response flood detection using the MSG geostationary satellite. Int. J. Appl. Earth Obs. Geoinf. 2011, 13, 536–544. [Google Scholar] [CrossRef]
- Yan, Q.; Chen, Y.; Jin, S.; Liu, S.; Jia, Y.; Zhen, Y.; Chen, T.; Huang, W. Inland Water Mapping Based on Ga-Linknet from Cygnss Data. IEEE Geosci. Remote Sens. Lett. 2022, 20, 1–5. [Google Scholar] [CrossRef]
- Yan, Q.; Liu, S.; Chen, T.; Jin, S.; Xie, T.; Huang, W. Mapping Surface Water Fraction Over the Pan-Tropical Region Using CYGNSS Data. IEEE Trans. Geosci. Remote Sens. 2024, 62, 1–14. [Google Scholar] [CrossRef]
- Kitajima, N.; Seto, R.; Yamazaki, D.; Zhou, X.; Ma, W.; Kanae, S. Potential of a SAR Small-Satellite Constellation for Rapid Monitoring of Flood Extent. Remote Sens. 2021, 13, 1959. [Google Scholar] [CrossRef]
- Giustarini, L.; Hostache, R.; Matgen, P.; Schumann, G.J.P.; Bates, P.D.; Mason, D.C. A Change Detection Approach to Flood Mapping in Urban Areas Using TerraSAR-X. IEEE Trans. Geosci. Remote Sens. 2013, 51, 2417–2430. [Google Scholar] [CrossRef]
- Martinez, J.-M.; Letoan, T.; Le Toan, T. Mapping of flood dynamics and spatial distribution of vegetation in the Amazon floodplain using multitemporal SAR data. Remote Sens. Environ. 2007, 108, 209–223. [Google Scholar] [CrossRef]
- Matgen, P.; Schumann, G.; Henry, J.-B.; Hoffmann, L.; Pfister, L. Integration of SAR-derived river inundation areas, high-precision topographic data and a river flow model toward near real-time flood management. Int. J. Appl. Earth Obs. Geoinform. 2007, 9, 247–263. [Google Scholar] [CrossRef]
- Xu, C.; Du, X.; Fan, X.; Yan, Z.; Kang, X.; Zhu, J.; Hu, Z. A modular remote sensing big data framework. IEEE Trans. Geosci. Remote Sens. 2021, 60, 1–11. [Google Scholar] [CrossRef]
- Xu, C.; Du, X.; Fan, X.; Giuliani, G.; Hu, Z.; Wang, W.; Liu, J.; Wang, T.; Yan, Z.; Zhu, J.; et al. Cloud-based storage and computing for remote sensing big data: A technical review. Int. J. Digit. Earth 2022, 15, 1417–1445. [Google Scholar] [CrossRef]
- Boni, G.; Ferraris, L.; Pulvirenti, L.; Squicciarino, G.; Pierdicca, N.; Candela, L.; Pisani, A.R.; Zoffoli, S.; Onori, R.; Proietti, C.; et al. A prototype system for flood monitoring based on flood forecast combined with COSMO-SkyMed and Sentinel-1 data. IEEE J. Sel. Topics Appl. Earth Observ. Remote Sens. 2016, 9, 2794–2805. [Google Scholar] [CrossRef]
- Greifeneder, F.; Wagner, W.; Sabel, D.; Naeimi, V. Suitability of SAR imagery for automatic flood mapping in the Lower Mekong Basin. In Remote Sensing the Mekong; Routledge: Oxfordshire, UK, 2018; pp. 111–128. [Google Scholar]
- Manjusree, P.; Kumar, L.; Bhatt, C.M.; Rao, G.S.; Bhanumurthy, V. Optimization of threshold ranges for rapid flood inundation mapping by evaluating backscatter profiles of high incidence angle SAR images. Int. J. Disaster Risk Sci. 2012, 3, 113–122. [Google Scholar] [CrossRef]
- Chen, L.; Liu, Z.; Zhang, H. SAR Image Water Extraction based on Scattering Characteristics. Remote Sens. Technol. Appl. 2014, 29, 963–969. [Google Scholar]
- Chini, M.; Hostache, R.; Giustarini, L.; Matgen, P. A hierarchical split-based approach for parametric thresholding of SAR images: Flood inundation as a test case. IEEE Trans. Geosci. Remote Sens. 2017, 55, 6975–6988. [Google Scholar] [CrossRef]
- Liang, J.; Liu, D. A local thresholding approach to flood water delineation using Sentinel-1 SAR imagery. ISPRS J. Photogramm. Remote Sens. 2020, 159, 53–62. [Google Scholar] [CrossRef]
- Martinis, S.; Kersten, J.; Twele, A. A fully automated TerraSAR-X based flood service. ISPRS J. Photogramm. Remote Sens. 2015, 104, 203–212. [Google Scholar] [CrossRef]
- Huang, Z.; Wu, W.; Liu, H.; Zhang, W.; Hu, J. Identifying Dynamic Changes in Water Surface Using Sentinel-1 Data Based on Genetic Algorithm and Machine Learning Techniques. Remote Sens. 2021, 13, 3745. [Google Scholar] [CrossRef]
- Qiu, F.; Guo, Z.; Zhang, Z.; Wei, X.; Jing, M. Water Body Area Extraction from SAR Image based on Improved SVM Classification Method. Geo Inf. Sci. 2022, 24, 940–948. [Google Scholar]
- He, Y.; Yao, S.; Yang, W.; Yan, H.; Zhang, L.; Wen, Z.; Zhang, Y.; Liu, T. An extraction method for glacial lakes based on Landsat-8 imagery using an improved U-Net network. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 6544–6558. [Google Scholar] [CrossRef]
- Wei, S.; Zhang, H.; Wang, C.; Wang, Y.; Xu, L. Multi-temporal SAR data large-scale crop mapping based on U-Net model. Remote Sens. 2019, 11, 68. [Google Scholar] [CrossRef]
- Qin, H.; Wang, J.; Mao, X.; Zhao, Z.; Gao, X.; Lu, W. An Improved Faster R-CNN Method for Landslide Detection in Remote Sensing Images. J. Geovis. Spat. Anal. 2024, 8, 2. [Google Scholar] [CrossRef]
- Solórzano, J.V.; Mas, J.F.; Gao, Y.; Gallardo-Cruz, J.A. Land use land cover classification with U-net: Advantages of combining sentinel-1 and sentinel-2 imagery. Remote Sens. 2021, 13, 3600. [Google Scholar] [CrossRef]
- Dai, M.; Leng, X.; Xiong, B.; Ji, K. An Efficient Water Segmentation Method for SAR Images. In Proceedings of the IGARSS 2020—2020 IEEE International Geoscience and Remote Sensing Symposium, Waikoloa, HI, USA, 26 September–2 October 2020; pp. 1129–1132. [Google Scholar]
- Zhang, J.; Xing, M.; Sun, G.-C.; Chen, J.; Li, M.; Hu, Y.; Bao, Z. Water Body Detection in High-Resolution SAR Images with Cascaded Fully-Convolutional Network and Variable Focal Loss. IEEE Trans. Geosci. Remote Sens. 2021, 59, 316–332. [Google Scholar] [CrossRef]
- Vaswani, A.; Shazeer, N.; Parmar, N.; Uszkoreit, J.; Jones, L.; Gomez, A.N.; Kaiser, Ł.; Polosukhin, I. Attention Is All You Need. Adv. Neural Inf. Process. Syst. 2017, 30, 5998–6008. [Google Scholar]
- Dosovitskiy, A.; Beyer, L.; Kolesnikov, A.; Weissenborn, D.; Zhai, X.; Unterthiner, T.; Dehghani, M.; Minderer, M.; Heigold, G.; Gelly, S.; et al. An Image is Worth 16x16 Words: Transformers for Image Recognition at Scale. arXiv 2021, arXiv:2010.11929. [Google Scholar]
- Liu, Z.; Lin, Y.; Cao, Y.; Hu, H.; Wei, Y.; Zhang, Z.; Lin, S.; Guo, B. Swin transformer: Hierarchical vision transformer using shifted windows. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Montreal, QC, Canada, 10–17 October 2021. [Google Scholar]
- Carion, N.; Massa, F.; Synnaeve, G.; Usunier, N.; Kirillov, A.; Zagoruyko, S. End-to-end object detection with transformers. In European Conference on Computer Vision; Springer: Cham, Switzerland, 2020; pp. 213–229. [Google Scholar]
- Wang, H.; Zhu, Y.; Green, B.; Adam, H.; Yuille, A.; Chen, L.C. Axial-deeplab: Stand-alone axial-attention for panoptic segmentation. In European Conference on Computer Vision; Springer: Cham, Switzerland, 2020; pp. 108–126. [Google Scholar]
- Wang, H.; Xing, C.; Yin, J.; Yang, J. Land Cover Classification for Polarimetric SAR Images Based on Vision Transformer. Remote Sens. 2022, 14, 4656. [Google Scholar] [CrossRef]
- Dong, H.; Zhang, L.; Zou, B. Exploring Vision Transformers for Polarimetric SAR Image Classification. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–15. [Google Scholar] [CrossRef]
- Liu, X.; Wu, Y.; Liang, W.; Cao, Y.; Li, M. High Resolution SAR Image Classification Using Global-Local Network Structure Based on Vision Transformer and CNN. IEEE Geosci. Remote Sens. Lett. 2022, 19, 1–5. [Google Scholar] [CrossRef]
- Dong, Y.; Liu, Q.; Du, B.; Zhang, L. Weighted Feature Fusion of Convolutional Neural Network and Graph Attention Network for Hyperspectral Image Classification. IEEE Trans. Image Process 2022, 31, 1559–1572. [Google Scholar] [CrossRef]
- Jia, S.; Xue, D.; Li, C.; Zheng, J.; Li, W. Study on New Method for Water Area Information Extraction Based on Sentinel-1 Data. Yangtze River 2019, 50, 213–217. [Google Scholar]
- Zhao, T.; Du, X.; Yan, Z.; Zhu, J.; Xu, C.; Fan, X. Adaptive superpixel segmentation of SAR images using an adaptive adjustment strategy for seeds. Natl. Remote Sens. Bull. 2023, 1–12. [Google Scholar] [CrossRef]
- Celik, T.; Tjahjadi, T. Automatic Image Equalization and Contrast Enhancement Using Gaussian Mixture Modeling. IEEE Trans. Image Process 2012, 21, 145–156. [Google Scholar] [CrossRef]
- Jampani, V.; Sun, D.; Liu, M.Y.; Yang, M.H.; Kautz, J. Superpixel Sampling Networks. In Proceedings of the European Conference on Computer Vision, Munich, Germany, 8–14 September 2018; pp. 352–368. [Google Scholar]
- Liu, Q.; Xiao, L.; Yang, J.; Wei, Z. CNN-Enhanced Graph Convolutional Network with Pixel- and Superpixel-Level Feature Fusion for Hyperspectral Image Classification. IEEE Trans. Geosci. Remote Sens. 2021, 59, 8657–8671. [Google Scholar] [CrossRef]
- Kipf, T.N.; Welling, M. Semi-supervised classification with graph convolutional networks. arXiv 2017, arXiv:1609.02907. [Google Scholar]
- Pekel, J.-F.; Cottam, A.; Gorelick, N.; Belward, A.S. High-resolution mapping of global surface water and its long-term changes. Nature 2016, 540, 418–422. [Google Scholar] [CrossRef] [PubMed]
- Crippen, R.; Buckley, S.; Agram, P.; Belz, E.; Gurrola, E.; Hensley, S.; Kobrick, M.; Lavalle, M.; Martin, J.; Neumann, M.; et al. Nasadem Global Elevation Model: Methods and Progress. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 41, 125–128. [Google Scholar] [CrossRef]
- Tan, M.; Le, Q. EfficientNet: Rethinking Model Scaling for Convolutional Neural Networks. In Proceedings of the 36th International Conference on Machine Learning, Long Beach, CA, USA, 9–15 June 2019; Volume 97, pp. 6105–6114. [Google Scholar]
- Ioffe, S.; Szegedy, C. Batch Normalization: Accelerating Deep Network Training by Reducing Internal Covariate Shift. In Proceedings of the 32nd International Conference on Machine Learning, Lille, France, 7–9 July 2015; Volume 37, pp. 448–456. [Google Scholar]
- Cloud to Street, Microsoft, Radiant Earth Foundation. A Global Flood Events and Cloud Cover Dataset. Radiant MLHub. 2022. Available online: https://registry.opendata.aws/c2smsfloods/ (accessed on 20 June 2022).
- Ronneberger, O.; Fischer, P.; Brox, T. U-Net: Convolutional Networks for Biomedical Image Segmentation. In Proceedings of the 18th International Conference, Munich, Germany, 5–9 October 2015; pp. 234–241. [Google Scholar]
- Chen, L.C.; Zhu, Y.; Papandreou, G.; Schroff, F.; Adam, H. Encoder-Decoder with Atrous Separable Convolution for Semantic Image Segmentation. In Proceedings of the European Conference on Computer Vision, Munich, Germany, 8–14 September 2018; pp. 801–818. [Google Scholar]
- Cao, H.; Wang, Y.; Chen, J.; Jiang, D.; Zhang, X.; Tian, Q.; Wang, M. Swin-unet: Unet-like pure transformer for medical image segmentation. arXiv 2021, arXiv:2105.05537. [Google Scholar]
- Wang, J.; Wang, S.; Wang, F.; Zhou, Y.; Wang, Z.; Ji, J.; Xiong, Y.; Zhao, Q. FWENet: A deep convolutional neural network for flood water body extraction based on SAR images. Int. J. Digit. Earth 2022, 15, 345–361. [Google Scholar] [CrossRef]
- Zhao, B.; Sui, H.; Liu, J. Siam-DWENet: Flood inundation detection for SAR imagery using a cross-task transfer siamese network. Int. J. Appl. Earth Obs. Geoinform. 2023, 116, 103132. [Google Scholar] [CrossRef]
- Selvaraju, R.R.; Cogswell, M.; Das, A.; Vedantam, R.; Parikh, D.; Batra, D. Grad-CAM: Visual Explanations from Deep Networks via Gradient-Based Localization. Int. J. Comput. Vis. 2020, 128, 336–359. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| C2S-MS | |
|---|---|
| band | VV, VH |
| Train. | 6300 |
| Val. | 900 |
| Test. | 900 |
| Network | IoU | Recall | Precision | F1 |
|---|---|---|---|---|
| U-Net | 72.8 | 82.81 | 77.42 | 80.02 |
| Deeplabv3+ | 72.48 | 82.11 | 84.12 | 83.10 |
| FWENet | 72.42 | 86.80 | 79.79 | 83.15 |
| DWENet | 73.00 | 78.94 | 89.03 | 83.68 |
| GCN | 66.22 | 74.87 | 82.87 | 78.67 |
| Swin-UNet | 66.35 | 78.77 | 78.63 | 78.70 |
| SPT-UNet | 80.10 | 86.20 | 91.07 | 88.57 |
| Z | IoU | Recall | Precision | F1 |
|---|---|---|---|---|
| 256 | 77.36 | 87.27 | 86.21 | 86.74 |
| 512 | 80.10 | 86.20 | 91.07 | 88.57 |
| 800 | 75.40 | 83.03 | 87.22 | 85.07 |
| 1024 | 79.80 | 87.20 | 89.57 | 88.37 |
| 1200 | 76.84 | 82.45 | 91.40 | 86.69 |
| a | IoU | Recall | Precision | F1 |
|---|---|---|---|---|
| 0.3 | 77.11 | 86.57 | 86.20 | 86.38 |
| 0.4 | 78.96 | 83.86 | 92.19 | 87.83 |
| 0.5 | 78.82 | 85.87 | 90.03 | 87.90 |
| 0.6 | 80.10 | 86.20 | 91.07 | 88.57 |
| 0.7 | 78.03 | 86.54 | 88.06 | 87.29 |
| Combination Method | IoU | Recall | Precision | F1 |
|---|---|---|---|---|
| VV + VH | 72.98 | 81.58 | 86.20 | 83.83 |
| VV + VH + SDWI | 74.55 | 81.20 | 88.09 | 84.50 |
| VV + VH + SDWI + DEM | 75.11 | 87.14 | 83.37 | 85.21 |
| VV + VH + SDWI + JRC-gsw | 77.66 | 82.40 | 92.26 | 87.05 |
| VV + VH + SDWI + DEM + JRC-gsw | 80.10 | 86.20 | 91.07 | 88.57 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, T.; Du, X.; Xu, C.; Jian, H.; Pei, Z.; Zhu, J.; Yan, Z.; Fan, X. SPT-UNet: A Superpixel-Level Feature Fusion Network for Water Extraction from SAR Imagery. Remote Sens. 2024, 16, 2636. https://doi.org/10.3390/rs16142636
Zhao T, Du X, Xu C, Jian H, Pei Z, Zhu J, Yan Z, Fan X. SPT-UNet: A Superpixel-Level Feature Fusion Network for Water Extraction from SAR Imagery. Remote Sensing. 2024; 16(14):2636. https://doi.org/10.3390/rs16142636
Chicago/Turabian StyleZhao, Teng, Xiaoping Du, Chen Xu, Hongdeng Jian, Zhipeng Pei, Junjie Zhu, Zhenzhen Yan, and Xiangtao Fan. 2024. "SPT-UNet: A Superpixel-Level Feature Fusion Network for Water Extraction from SAR Imagery" Remote Sensing 16, no. 14: 2636. https://doi.org/10.3390/rs16142636
APA StyleZhao, T., Du, X., Xu, C., Jian, H., Pei, Z., Zhu, J., Yan, Z., & Fan, X. (2024). SPT-UNet: A Superpixel-Level Feature Fusion Network for Water Extraction from SAR Imagery. Remote Sensing, 16(14), 2636. https://doi.org/10.3390/rs16142636