
Cross-Domain Classification Based on Frequency Component Adaptation for Remote Sensing Images


Abstract
1. Introduction
- Differences in the types of sensors and differences in parameters: Due to the differences in the types of sensors, heterogeneous data are produced with huge differences in data modalities, e.g., optical, hyperspectral, infrared, etc. Even sensors of the same modality, such as Gaofen-2 and WorldView satellites, have different resolutions and produce different spectra of images due to parameter differences.
- Differences in imaging conditions: even for the same sensor platform, for the same region, two images collected at different moments have large differences due to the influence of external conditions such as atmospheric conditions, platform attitude, and illumination.
- Scene differences: For the same sensor platform, due to the impact of history, geography and other factors, the same category of scenes contains differences. For example, China and the United States have very different architectural styles.
- A novel framework is proposed to decompose the features into low-frequency feature components and high-frequency feature components to be processed separately during the adaptation process, and the two dominant domain adaptation methods, namely, distribution-based and adversarial-based alignment, are organically integrated.
- In order to enhance the intra-domain discriminative ability of the network, we propose a high-frequency feature enhancement module. To enhance the inter-domain generalization ability of the network, better inter-domain invariant features are mined using dynamic MMD loss improved with low-frequency semantic information.
- Extensive transfer experiments on the merged cross-scene dataset and cross-sensor dataset validate the effectiveness of the method. Both our methods outperform several existing cross-domain classification methods.
2. Related Work
2.1. Domain Adaption
2.2. Cross-Domain Scene Classification
3. Materials and Methods
3.1. Preliminary
3.2. Overview
3.3. High-Frequency Branch
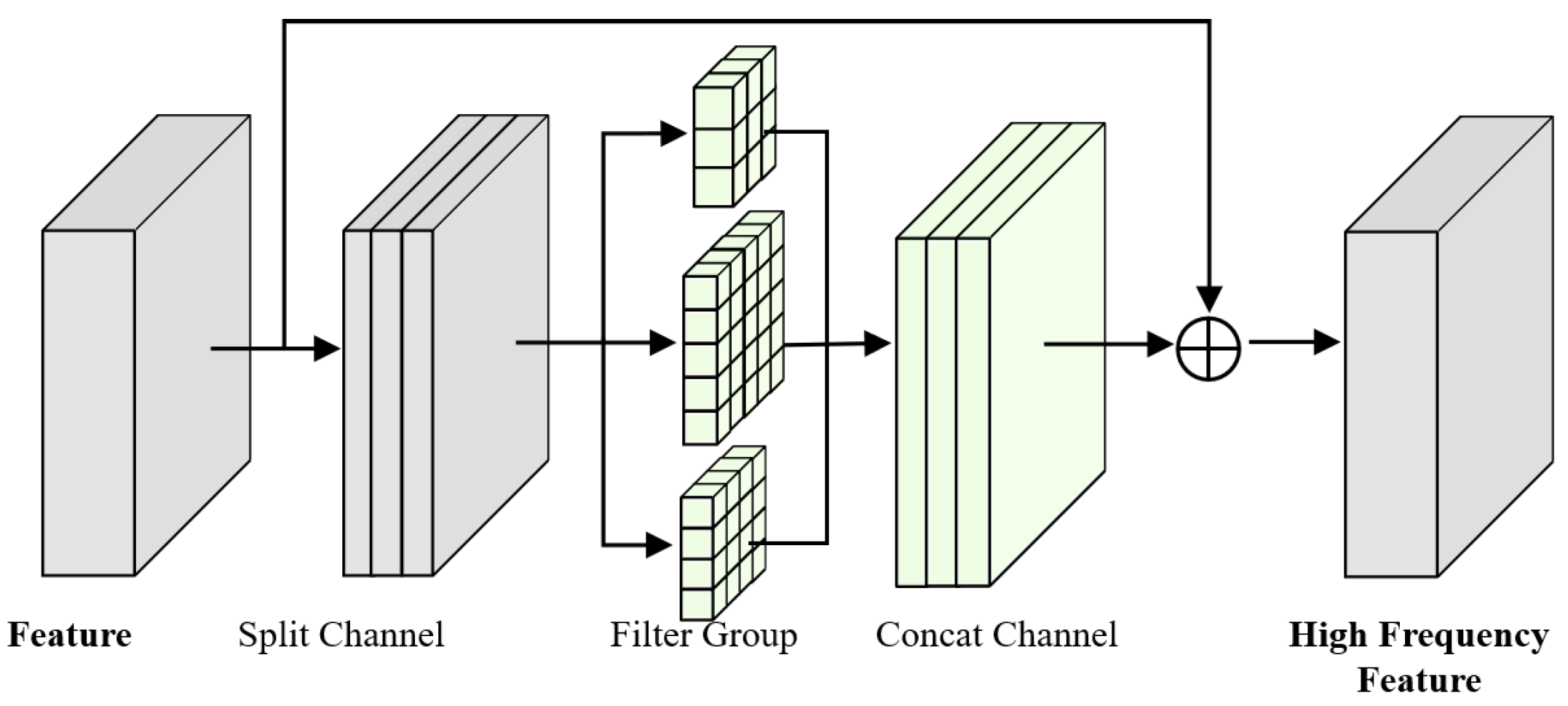
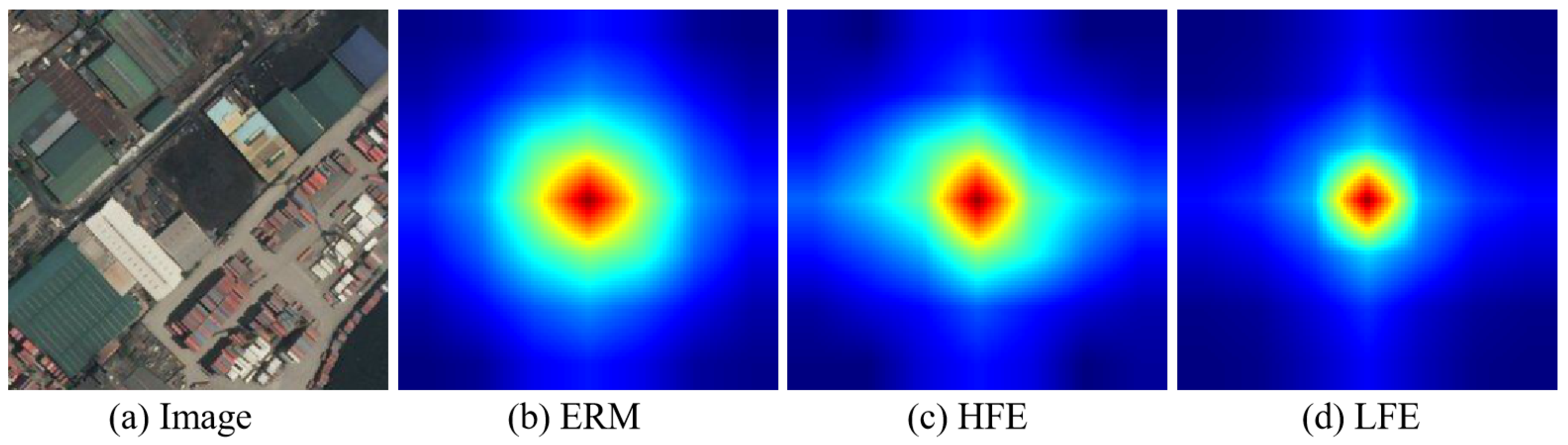
3.3.1. High-Frequency Feature Enhancement Module
3.3.2. Domain Adversarial Loss
3.4. Classification Branch
3.5. Low-Frequency Branch
3.5.1. Low-Frequency Feature Extraction Filter
3.5.2. DMMD Loss
3.6. Overall Loss
4. Experiments
4.1. Description of Cross-Scene Datasets
4.2. Description of Cross-Sensor Datasets
4.3. Implementation Details
4.4. Baselines
- ERM: The ordinary classification network that trains the model using the labels of the source domain and tests it on the target domain without any adaptation operations. This is our baseline.
- DAN [24] uses MMD loss in CNNs to reduce the distributional difference between source and target domains.
- DANN [30] introduces the idea of adversarial learning for domain confusion.
- DeepCoral [28] uses CORAL losses for distributional difference measures.
- DAAN [53] uses dynamic adversarial factors to regulate the extent to which global distributions and local subdomain distributions contribute to the model and to better learn domain-invariant representations.
- BNM [54] introduces the Batch Nuclear-norm Maximization (BNM) technique for target domain features to improve feature differentiation and diversity.
- DSAN [43] uses the local maximum mean difference to align the distribution of subregions in the source and target domains to facilitate the transfer of domain knowledge.
- AMRAN [13] improves the quality of feature representation using the attention mechanism and aligns the marginal and conditional distributions.
- MRDAN [35] maps samples to multiple representations and fuses them to obtain a broader domain-invariant feature space, adjusting the relative importance of local and global adaptation losses during domain adaptation.
- APA [55] proposes a UDA framework based on penultimate activations for adversarial training to improve the confidence of the model on unlabeled target domain data.
4.5. Comparison with State-of-the-Art Methods
4.6. Ablation Study
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| DA | Domain Adaptation |
| HFE | High-frequency Feature Enhancement Module |
| LFE | Low-frequency Feature Extraction Module |
| FCAN | Frequency Component Adaptation Network |
| GRL | Gradient Reversal Layer |
| MMD | Maximum Mean Discrepancy |
| OA | Overall Accuracy |
References
- Cheng, G.; Li, Z.; Yao, X.; Guo, L.; Wei, Z. Remote sensing image scene classification using bag of convolutional features. IEEE Geosci. Remote Sens. Lett. 2017, 14, 1735–1739. [Google Scholar] [CrossRef]
- Wang, Q.; Liu, S.; Chanussot, J.; Li, X. Scene classification with recurrent attention of VHR remote sensing images. IEEE Trans. Geosci. Remote Sens. 2018, 57, 1155–1167. [Google Scholar] [CrossRef]
- Lu, X.; Sun, H.; Zheng, X. A feature aggregation convolutional neural network for remote sensing scene classification. IEEE Trans. Geosci. Remote Sens. 2019, 57, 7894–7906. [Google Scholar] [CrossRef]
- Cheng, G.; Xie, X.; Han, J.; Guo, L.; Xia, G.S. Remote sensing image scene classification meets deep learning: Challenges, methods, benchmarks, and opportunities. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 3735–3756. [Google Scholar] [CrossRef]
- Ma, L.; Li, M.; Ma, X.; Cheng, L.; Du, P.; Liu, Y. A review of supervised object-based land-cover image classification. ISPRS J. Photogramm. Remote Sens. 2017, 130, 277–293. [Google Scholar] [CrossRef]
- Ma, L.; Liu, Y.; Zhang, X.; Ye, Y.; Yin, G.; Johnson, B.A. Deep learning in remote sensing applications: A meta-analysis and review. ISPRS J. Photogramm. Remote Sens. 2019, 152, 166–177. [Google Scholar] [CrossRef]
- Cheng, G.; Yang, C.; Yao, X.; Guo, L.; Han, J. When deep learning meets metric learning: Remote sensing image scene classification via learning discriminative CNNs. IEEE Trans. Geosci. Remote Sens. 2018, 56, 2811–2821. [Google Scholar] [CrossRef]
- Xie, J.; He, N.; Fang, L.; Plaza, A. Scale-free convolutional neural network for remote sensing scene classification. IEEE Trans. Geosci. Remote Sens. 2019, 57, 6916–6928. [Google Scholar] [CrossRef]
- Xu, M.; Wu, M.; Chen, K.; Zhang, C.; Guo, J. The eyes of the gods: A survey of unsupervised domain adaptation methods based on remote sensing data. Remote Sens. 2022, 14, 4380. [Google Scholar] [CrossRef]
- Peng, J.; Huang, Y.; Sun, W.; Chen, N.; Ning, Y.; Du, Q. Domain adaptation in remote sensing image classification: A survey. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2022, 15, 9842–9859. [Google Scholar] [CrossRef]
- Tong, X.Y.; Xia, G.S.; Lu, Q.; Shen, H.; Li, S.; You, S.; Zhang, L. Land-cover classification with high-resolution remote sensing images using transferable deep models. Remote Sens. Environ. 2020, 237, 111322. [Google Scholar] [CrossRef]
- Othman, E.; Bazi, Y.; Melgani, F.; Alhichri, H.; Alajlan, N.; Zuair, M. Domain adaptation network for cross-scene classification. IEEE Trans. Geosci. Remote Sens. 2017, 55, 4441–4456. [Google Scholar] [CrossRef]
- Zhu, S.; Du, B.; Zhang, L.; Li, X. Attention-based multiscale residual adaptation network for cross-scene classification. IEEE Trans. Geosci. Remote Sens. 2021, 60, 5400715. [Google Scholar] [CrossRef]
- Yang, C.; Dong, Y.; Du, B.; Zhang, L. Attention-based dynamic alignment and dynamic distribution adaptation for remote sensing cross-domain scene classification. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5634713. [Google Scholar] [CrossRef]
- Wei, H.; Ma, L.; Liu, Y.; Du, Q. Combining multiple classifiers for domain adaptation of remote sensing image classification. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 1832–1847. [Google Scholar] [CrossRef]
- Zhang, J.; Liu, J.; Pan, B.; Shi, Z. Domain adaptation based on correlation subspace dynamic distribution alignment for remote sensing image scene classification. IEEE Trans. Geosci. Remote Sens. 2020, 58, 7920–7930. [Google Scholar] [CrossRef]
- Yan, L.; Zhu, R.; Mo, N.; Liu, Y. Cross-domain distance metric learning framework with limited target samples for scene classification of aerial images. IEEE Trans. Geosci. Remote Sens. 2019, 57, 3840–3857. [Google Scholar] [CrossRef]
- Teng, W.; Wang, N.; Shi, H.; Liu, Y.; Wang, J. Classifier-constrained deep adversarial domain adaptation for cross-domain semisupervised classification in remote sensing images. IEEE Geosci. Remote Sens. Lett. 2019, 17, 789–793. [Google Scholar] [CrossRef]
- Zhu, S.; Wu, C.; Du, B.; Zhang, L. Adversarial Divergence Training for Universal Cross-scene Classification. IEEE Trans. Geosci. Remote Sens. 2023. [Google Scholar] [CrossRef]
- Zheng, Z.; Zhong, Y.; Su, Y.; Ma, A. Domain adaptation via a task-specific classifier framework for remote sensing cross-scene classification. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5620513. [Google Scholar] [CrossRef]
- Zhang, X.; Yao, X.; Feng, X.; Cheng, G.; Han, J. DFENet for domain adaptation-based remote sensing scene classification. IEEE Trans. Geosci. Remote Sens. 2021, 60, 5611611. [Google Scholar] [CrossRef]
- Wang, H.; Wu, X.; Huang, Z.; Xing, E.P. High-frequency component helps explain the generalization of convolutional neural networks. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 14–19 June 2020; pp. 8684–8694. [Google Scholar]
- Wang, M.; Deng, W. Deep visual domain adaptation: A survey. Neurocomputing 2018, 312, 135–153. [Google Scholar] [CrossRef]
- Tzeng, E.; Hoffman, J.; Zhang, N.; Saenko, K.; Darrell, T. Deep domain confusion: Maximizing for domain invariance. arXiv 2014, arXiv:1412.3474. [Google Scholar]
- Long, M.; Cao, Y.; Wang, J.; Jordan, M. Learning transferable features with deep adaptation networks. In Proceedings of the International Conference on Machine Learning, Lille, France, 7–9 July 2015; pp. 97–105. [Google Scholar]
- Long, M.; Zhu, H.; Wang, J.; Jordan, M.I. Deep transfer learning with joint adaptation networks. In Proceedings of the International Conference on Machine Learning, Sydney, Australia, 6–11 August 2017; pp. 2208–2217. [Google Scholar]
- Yan, H.; Ding, Y.; Li, P.; Wang, Q.; Xu, Y.; Zuo, W. Mind the class weight bias: Weighted maximum mean discrepancy for unsupervised domain adaptation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 2272–2281. [Google Scholar]
- Sun, B.; Saenko, K. Deep coral: Correlation alignment for deep domain adaptation. In Proceedings of the Computer Vision–ECCV 2016 Workshops, Amsterdam, The Netherlands, 8–10 October 2016; Proceedings, Part III 14. Springer: Berlin/Heidelberg, Germany, 2016; pp. 443–450. [Google Scholar]
- Goodfellow, I.; Pouget-Abadie, J.; Mirza, M.; Xu, B.; Warde-Farley, D.; Ozair, S.; Courville, A.; Bengio, Y. Generative adversarial nets. Adv. Neural Inf. Process. Syst. 2014, 27, 139–144. [Google Scholar] [CrossRef]
- Ganin, Y.; Lempitsky, V. Unsupervised domain adaptation by backpropagation. In Proceedings of the International Conference on Machine Learning, Lille, France, 7–9 July 2015; pp. 1180–1189. [Google Scholar]
- Long, M.; Cao, Z.; Wang, J.; Jordan, M.I. Conditional adversarial domain adaptation. Adv. Neural Inf. Process. Syst. 2018, 31, 1647–1657. [Google Scholar]
- Tao, C.; Xiao, R.; Wang, Y.; Qi, J.; Li, H. A General Transitive Transfer Learning Framework for Cross-Optical Sensor Remote Sensing Image Scene Understanding. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2023, 16, 4248–4260. [Google Scholar] [CrossRef]
- Zhao, Y.; Li, S.; Liu, C.H.; Han, Y.; Shi, H.; Li, W. Domain adaptive remote sensing scene recognition via semantic relationship knowledge transfer. IEEE Trans. Geosci. Remote Sens. 2023, 61, 2001013. [Google Scholar] [CrossRef]
- Huang, W.; Shi, Y.; Xiong, Z.; Wang, Q.; Zhu, X.X. Semi-supervised bidirectional alignment for remote sensing cross-domain scene classification. ISPRS J. Photogramm. Remote Sens. 2023, 195, 192–203. [Google Scholar] [CrossRef]
- Niu, B.; Pan, Z.; Wu, J.; Hu, Y.; Lei, B. Multi-representation dynamic adaptation network for remote sensing scene classification. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5633119. [Google Scholar] [CrossRef]
- Dong, Y.; Qin, X.; Li, X.; Xu, L. Multilevel Spatial Features-Based Manifold Metric Learning for Domain Adaptation in Remote Sensing Image Classification. IEEE Trans. Geosci. Remote Sens. 2023, 61, 5527414. [Google Scholar] [CrossRef]
- Chen, Y.; Teng, W.; Li, Z.; Zhu, Q.; Guan, Q. Cross-domain scene classification based on a spatial generalized neural architecture search for high spatial resolution remote sensing images. Remote Sens. 2021, 13, 3460. [Google Scholar] [CrossRef]
- Xu, C.; Shu, J.; Zhu, G. Multi-Feature Dynamic Fusion Cross-Domain Scene Classification Model Based on Lie Group Space. Remote Sens. 2023, 15, 4790. [Google Scholar] [CrossRef]
- Zhang, X.; Zhuang, Y.; Zhang, T.; Li, C.; Chen, H. Masked Image Modeling Auxiliary Pseudo-Label Propagation with a Clustering Central Rectification Strategy for Cross-Scene Classification. Remote Sens. 2024, 16, 1983. [Google Scholar] [CrossRef]
- Rao, Y.; Zhao, W.; Zhu, Z.; Lu, J.; Zhou, J. Global filter networks for image classification. Adv. Neural Inf. Process. Syst. 2021, 34, 980–993. [Google Scholar]
- Dong, B.; Wang, P.; Wang, F. Head-free lightweight semantic segmentation with linear transformer. In Proceedings of the AAAI Conference on Artificial Intelligence, Washiongton, DC, USA, 7–14 February 2023; Volume 37, pp. 516–524. [Google Scholar]
- Szegedy, C.; Vanhoucke, V.; Ioffe, S.; Shlens, J.; Wojna, Z. Rethinking the inception architecture for computer vision. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 2818–2826. [Google Scholar]
- Zhu, Y.; Zhuang, F.; Wang, J.; Ke, G.; Chen, J.; Bian, J.; Xiong, H.; He, Q. Deep subdomain adaptation network for image classification. IEEE Trans. Neural Netw. Learn. Syst. 2020, 32, 1713–1722. [Google Scholar] [CrossRef] [PubMed]
- Xia, G.S.; Hu, J.; Hu, F.; Shi, B.; Bai, X.; Zhong, Y.; Zhang, L.; Lu, X. AID: A benchmark data set for performance evaluation of aerial scene classification. IEEE Trans. Geosci. Remote Sens. 2017, 55, 3965–3981. [Google Scholar] [CrossRef]
- Li, H.; Jiang, H.; Gu, X.; Peng, J.; Li, W.; Hong, L.; Tao, C. CLRS: Continual learning benchmark for remote sensing image scene classification. Sensors 2020, 20, 1226. [Google Scholar] [CrossRef] [PubMed]
- Qi, X.; Zhu, P.; Wang, Y.; Zhang, L.; Peng, J.; Wu, M.; Chen, J.; Zhao, X.; Zang, N.; Mathiopoulos, P.T. MLRSNet: A multi-label high spatial resolution remote sensing dataset for semantic scene understanding. ISPRS J. Photogramm. Remote Sens. 2020, 169, 337–350. [Google Scholar] [CrossRef]
- Zou, Q.; Ni, L.; Zhang, T.; Wang, Q. Deep learning based feature selection for remote sensing scene classification. IEEE Geosci. Remote Sens. Lett. 2015, 12, 2321–2325. [Google Scholar] [CrossRef]
- Zhu, S.; Wu, C.; Du, B.; Zhang, L. Style and content separation network for remote sensing image cross-scene generalization. ISPRS J. Photogramm. Remote Sens. 2023, 201, 1–11. [Google Scholar] [CrossRef]
- Zhou, Z.; Li, S.; Wu, W.; Guo, W.; Li, X.; Xia, G.; Zhao, Z. NaSC-TG2: Natural scene classification with Tiangong-2 remotely sensed imagery. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 3228–3242. [Google Scholar] [CrossRef]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 26 June–1 July 2016; pp. 770–778. [Google Scholar]
- Deng, J.; Dong, W.; Socher, R.; Li, L.J.; Li, K.; Fei-Fei, L. Imagenet: A large-scale hierarchical image database. In Proceedings of the 2009 IEEE Conference on Computer Vision and Pattern Recognition, Miami, FL, USA, 20–25 June 2009; pp. 248–255. [Google Scholar]
- Paszke, A.; Gross, S.; Massa, F.; Lerer, A.; Bradbury, J.; Chanan, G.; Killeen, T.; Lin, Z.; Gimelshein, N.; Antiga, L.; et al. Pytorch: An imperative style, high-performance deep learning library. Adv. Neural Inf. Process. Syst. 2019, 32, 8026–8037. [Google Scholar]
- Yu, C.; Wang, J.; Chen, Y.; Huang, M. Transfer learning with dynamic adversarial adaptation network. In Proceedings of the 2019 IEEE International Conference on Data Mining (ICDM), Beijing, China, 8–11 November 2019; pp. 778–786. [Google Scholar]
- Cui, S.; Wang, S.; Zhuo, J.; Li, L.; Huang, Q.; Tian, Q. Towards discriminability and diversity: Batch nuclear-norm maximization under label insufficient situations. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 3941–3950. [Google Scholar]
- Sun, T.; Lu, C.; Ling, H. Domain adaptation with adversarial training on penultimate activations. In Proceedings of the AAAI Conference on Artificial Intelligence, Washington, DC, USA, 7–14 February 2023; Volume 37, pp. 9935–9943. [Google Scholar]
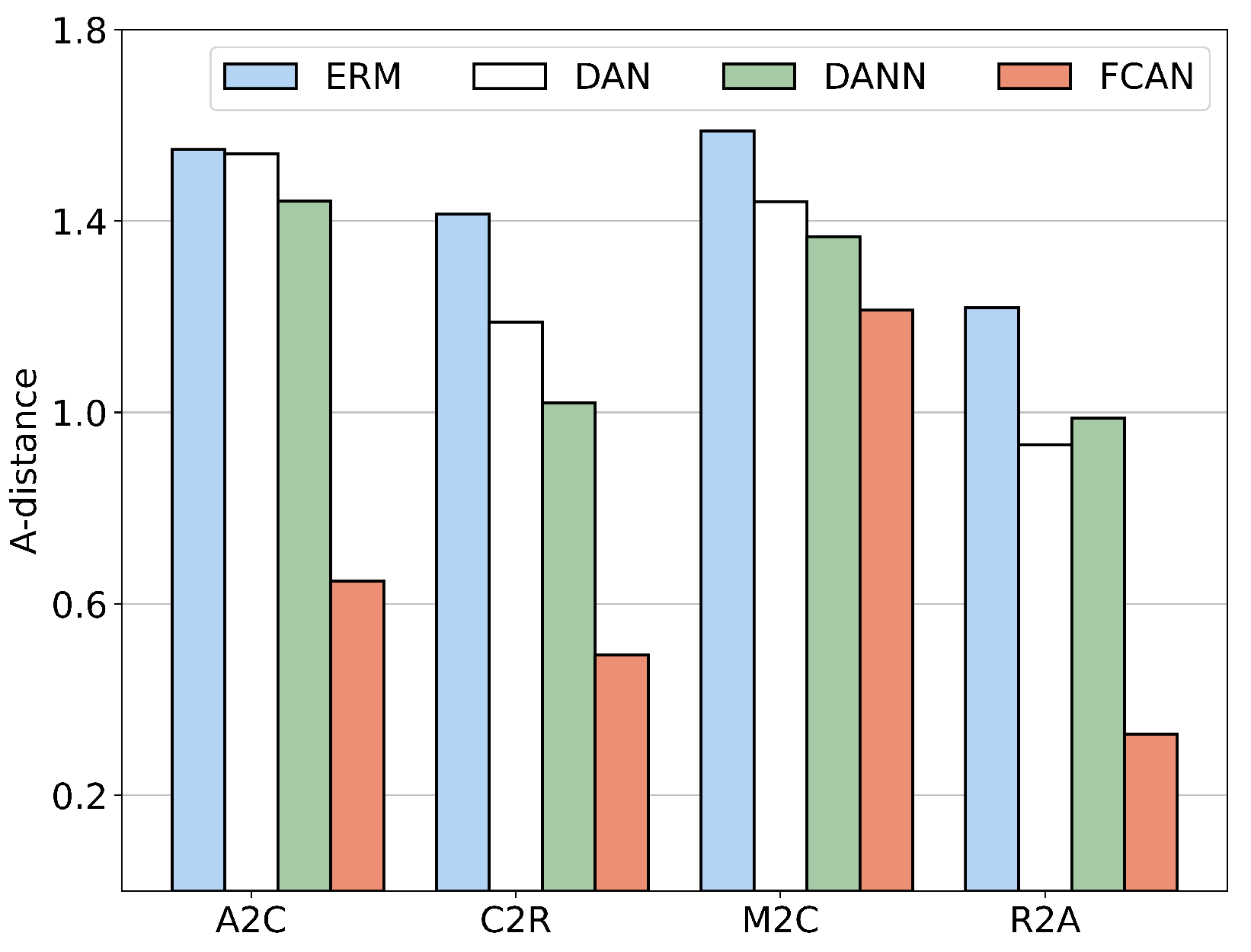
- Ben-David, S.; Blitzer, J.; Crammer, K.; Kulesza, A.; Pereira, F.; Vaughan, J.W. A theory of learning from different domains. Mach. Learn. 2010, 79, 151–175. [Google Scholar] [CrossRef]
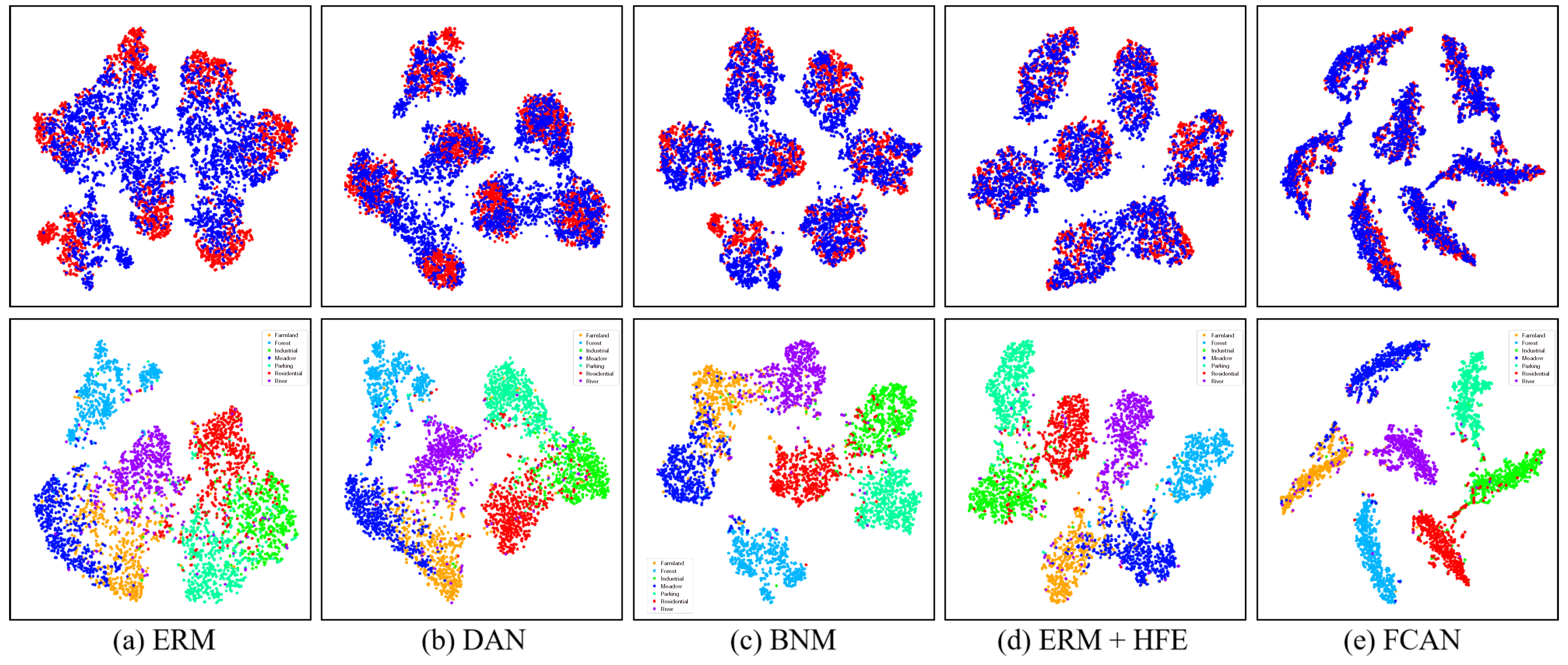
- Van der Maaten, L.; Hinton, G. Visualizing data using t-SNE. J. Mach. Learn. Res. 2008, 9, 2579–2605. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | A→C | A→M | A→R | C→A | C→M | C→R | M→A | M→C | M→R | R→A | R→C | R→M | AVG |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ERM | 90.31 | 73.73 | 69.79 | 96.44 | 75.14 | 69.64 | 72.80 | 65.62 | 62.32 | 81.28 | 78.31 | 62.30 | 74.81 |
| DAN | 92.17 | 83.73 | 73.61 | 96.24 | 80.68 | 73.32 | 75.92 | 76.00 | 70.79 | 91.12 | 84.90 | 73.84 | 81.03 |
| DAAN | 91.05 | 76.87 | 70.29 | 96.40 | 76.17 | 68.93 | 74.52 | 65.79 | 62.07 | 83.08 | 78.90 | 64.33 | 75.70 |
| DANN | 91.38 | 83.40 | 75.82 | 97.00 | 82.85 | 80.21 | 71.12 | 80.12 | 80.50 | 94.36 | 90.38 | 74.33 | 83.46 |
| DeepCoral | 90.79 | 76.78 | 71.18 | 96.32 | 77.83 | 70.25 | 74.48 | 69.21 | 62.82 | 83.56 | 79.02 | 66.38 | 76.55 |
| DSAN | 95.19 | 83.81 | 80.68 | 98.72 | 85.18 | 80.00 | 75.48 | 79.24 | 78.07 | 95.64 | 90.19 | 85.84 | 85.67 |
| BNM | 93.67 | 83.61 | 77.11 | 98.64 | 79.11 | 78.61 | 70.80 | 74.95 | 72.07 | 96.00 | 88.05 | 84.08 | 83.06 |
| AMRAN | 91.29 | 81.22 | 75.43 | 96.52 | 81.82 | 76.64 | 71.09 | 74.48 | 74.71 | 90.28 | 85.17 | 81.40 | 81.67 |
| MRDAN | 94.14 | 82.63 | 80.32 | 97.44 | 81.23 | 81.68 | 76.28 | 76.36 | 79.43 | 93.32 | 87.50 | 73.00 | 83.61 |
| APA | 93.52 | 77.14 | 75.64 | 98.44 | 76.00 | 74.86 | 81.32 | 61.45 | 60.71 | 97.68 | 86.88 | 67.79 | 79.29 |
| FCAN | 96.31 | 82.69 | 80.29 | 98.48 | 84.78 | 84.00 | 73.72 | 81.62 | 76.68 | 96.40 | 92.55 | 88.17 | 86.31 |
| N→T | T→N | AVG | |
|---|---|---|---|
| ERM | 61.25 | 63.21 | 62.23 |
| DAN | 73.59 | 77.66 | 75.62 |
| DAAN | 62.81 | 64.19 | 63.50 |
| DANN | 77.93 | 92.24 | 85.09 |
| DeepCoral | 66.72 | 65.66 | 66.19 |
| DSAN | 95.53 | 93.54 | 94.54 |
| BNM | 81.74 | 68.36 | 75.05 |
| AMRAN | 64.28 | 90.10 | 77.19 |
| MRDAN | 85.60 | 91.13 | 88.37 |
| APA | 68.48 | 57.04 | 62.76 |
| FCAN | 95.31 | 94.21 | 94.76 |
| HFE | LFE | AVG | |||
|---|---|---|---|---|---|
| ✔ | ✘ | ✘ | ✘ | ✘ | 74.81 |
| ✔ | ✘ | ✔ | ✘ | ✘ | 83.46 |
| ✔ | ✔ | ✔ | ✘ | ✘ | 83.90 |
| ✔ | ✔ | ✔ | ✘ | ✔ | 84.31 |
| ✔ | ✘ | ✘ | ✔ | ✔ | 86.03 |
| ✔ | ✔ | ✔ | ✔ | ✔ | 86.31 |
| Method | Params. (M) | FLOPs (G) | Training (s) |
|---|---|---|---|
| ERM | 25.56 | 4.13 | 0.16 |
| DAN | 24.17 | 8.27 | 0.25 |
| DANN | 24.17 | 8.27 | 0.26 |
| AMRAN | 24.77 | 8.33 | 0.23 |
| MRDAN | 55.97 | 13.05 | 0.38 |
| APA | 25.62 | 4.13 | 0.16 |
| FCAN | 24.76 | 25.12 | 0.27 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, P.; Zhang, X.; Han, X.; Cheng, X.; Gu, J.; Chen, P.; Jiao, L. Cross-Domain Classification Based on Frequency Component Adaptation for Remote Sensing Images. Remote Sens. 2024, 16, 2134. https://doi.org/10.3390/rs16122134
Zhu P, Zhang X, Han X, Cheng X, Gu J, Chen P, Jiao L. Cross-Domain Classification Based on Frequency Component Adaptation for Remote Sensing Images. Remote Sensing. 2024; 16(12):2134. https://doi.org/10.3390/rs16122134
Chicago/Turabian StyleZhu, Peng, Xiangrong Zhang, Xiao Han, Xina Cheng, Jing Gu, Puhua Chen, and Licheng Jiao. 2024. "Cross-Domain Classification Based on Frequency Component Adaptation for Remote Sensing Images" Remote Sensing 16, no. 12: 2134. https://doi.org/10.3390/rs16122134
APA StyleZhu, P., Zhang, X., Han, X., Cheng, X., Gu, J., Chen, P., & Jiao, L. (2024). Cross-Domain Classification Based on Frequency Component Adaptation for Remote Sensing Images. Remote Sensing, 16(12), 2134. https://doi.org/10.3390/rs16122134