
SaltISNet3D: Interactive Salt Segmentation from 3D Seismic Images Using Deep Learning


Abstract
1. Introduction
2. Methods
2.1. Synthetic Salt Data
- (1)
- Constructing a random polyhedron: Figure 1a shows a polyhedron used to construct a 3D salt body. A polyhedron is formed by connecting 10 to 30 random points, making them random and diverse to meet various salt structures.
- (2)
- Building binary label data of a 3D salt body: we use the cubic spline interpolation algorithm to smooth the polyhedron from step (1) and fill the smoothed polyhedron in a data volume with a size of 128 × 128 × 128 to construct a binary salt label, as shown in Figure 1b.
- (3)
- Building a layered acoustic impedance model: Figure 1c shows a layered geological model that is composed of the wave impedance of sandstone and mudstone. The acoustic impedance is obtained by multiplying the velocity and density of rock. The velocity and density of the sandstone and mudstone in the model are mainly based on the empirical formula proposed by Gardner [39]. Here, we set the range of the P-wave velocity of sandstone () to 1.5–2.5 km/s and calculate the density of sandstone () using the formula . The range of the P-wave velocity of mudstone () is 2.7–4.3 km/s and the formula of density for the mudstone () is .
- (4)
- Building a folded acoustic impedance model: the folded model in Figure 1d is formed by adding a shift field and folded field [40,41] to the layered model in Figure 1c. This method is mainly referred to by Wu et al. [42] for building folded structure models when simulating fault data. The shift field of the inclined structure is defined as:where and are the slopes in the and directions, respectively, the value range is , is the intercept, and the value range is .
- (5)
- Building a 3D acoustic impedance model containing salt bodies: combined with the binary salt label obtained in step (2), we fill the part of the salt corresponding to the folded model in step (4) as the acoustic impedance value of the salt. Here, we set the P-wave velocity and the density range of the salt dome to 4.5–6.5 km/s and 2.15–2.44 g/cm3, respectively. A 3D folded model with salt is shown in Figure 1e.
- (6)
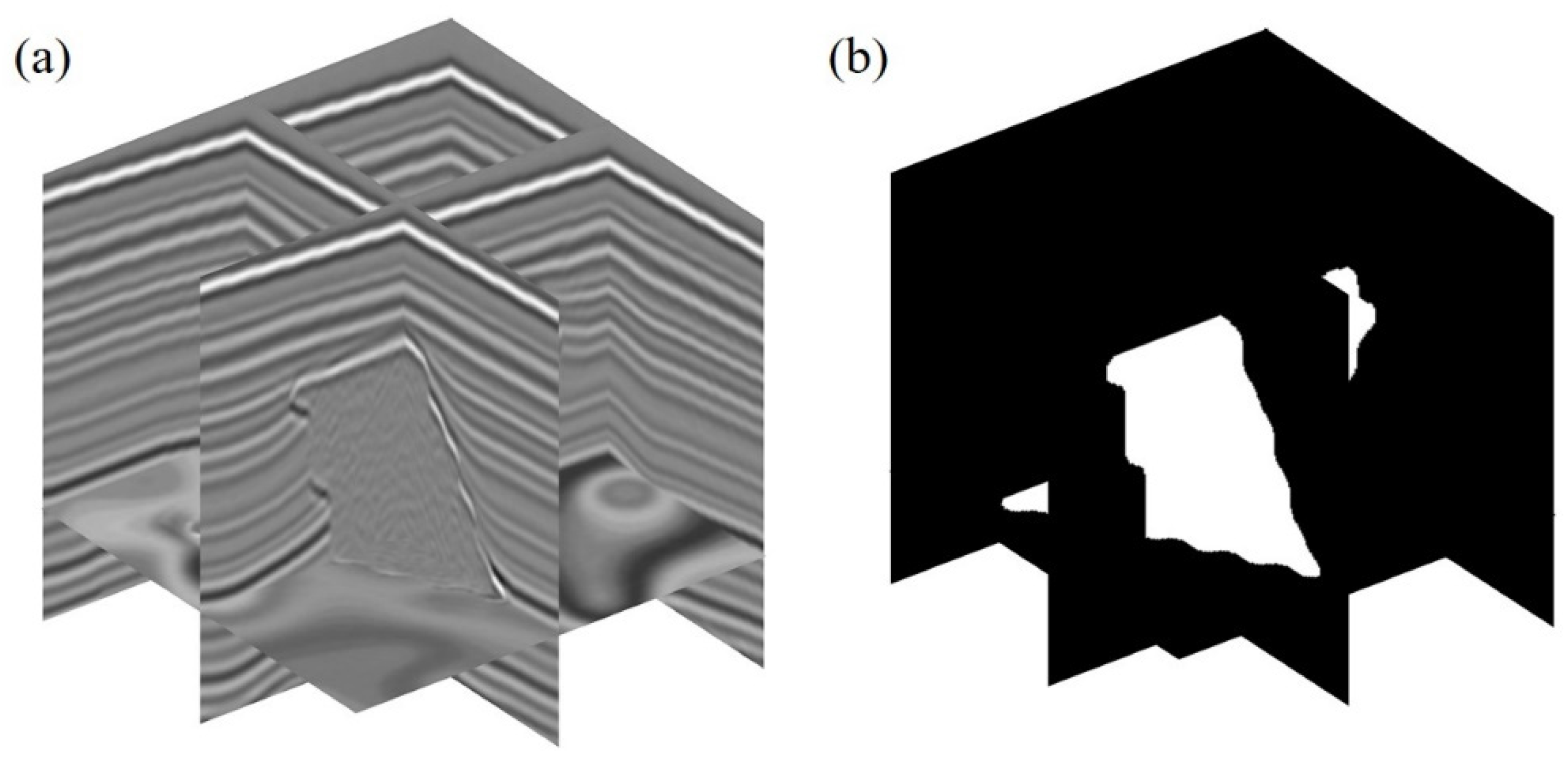
- Generating 3D seismic data: we calculate the reflection coefficient model from the 3D folded model containing salt obtained in step (5) and convolve it with the Ricker wave to generate 3D seismic data (Figure 1f).

2.2. Three Dimensional Euclidean Distance Maps
2.3. Three-Dimensional Network Architecture
2.4. Three-Dimensional Graph-Cut
| Algorithm 1 Three-dimensional graph-cut |
| Input: Salt probability , background probability and seismic data Output: salt segmentation for in do Obtain the probabilities of adjacent voxels . by Equation (8) by Equation (11), Equation (12) and Equation (13), respectively. end for by Equation (10) Obtain the energy function by Equation (5) Apply max-flow/min-cut to minimize the energy function Return salt segmentation |
3. Experiments
3.1. Training Using the Synthetic Salt Data
3.2. Test Using Validation Data
4. Application of 3D Field Seismic Data
4.1. SEAM Seismic Data
4.2. F3 Block Seismic Data
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef] [PubMed]
- LeCun, Y.; Bengio, Y.; Hinton, G. Gradient-based learning applied to document recognition. Proc. IEEE 1998, 86, 2278–2324. [Google Scholar] [CrossRef]
- Ossama, A.-H.; Mohamed, A.; Jiang, H.; Deng, L.; Penn, G.; Yu, D. Convolutional Neural Networks for Speech Recognition. IEEE/ACM Trans. Audio Speech Lang. Process. 2014, 22, 1533–1545. [Google Scholar]
- Ashish, S.; Pfister, T.; Tuzel, O.; Susskind, J.; Wang, W.; Webb, R. Learning from Simulated and Unsupervised Images through Adversarial Training. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, Hawaii, USA, 21–26 July 2017; pp. 2242–2251. [Google Scholar]
- LeCun, Y.; Boser, B.; Denker, J.; Henderson, D.; Howard, R.; Hubbard, W.; Jackel, L. Backpropagation Applied to Handwritten Zip Code Recognition. Neural Comput. 1989, 1, 541–551. [Google Scholar] [CrossRef]
- Krizhevsky, A.; Sutskever, I.; Hinton, G. ImageNet Classification with Deep Convolutional Neural Networks. In Proceedings of the 25th International Conference on Neural Information Processing Systems, Lake Tahoe, NV, USA, 3–6 December 2012; Volume 60, pp. 1097–1105. [Google Scholar]
- Falk, T.; Mai, D.; Bensch, R.; Çiçek, Ö.; Abdulkadir, A.; Marrakchi, Y.; Böhm, A.; Deubner, J.; Jäckel, Z.; Seiwald, K.; et al. U-Net: Deep learning for cell counting, detection, and morphometry. Nat. Methods 2019, 16, 67–70. [Google Scholar] [CrossRef]
- Greenspan, H.; Ginneken, B.; Summers, R. Guest Editorial Deep Learning in Medical Imaging: Overview and Future Promise of an Exciting New Technique. IEEE Trans. Med. Imaging 2016, 35, 1153–1159. [Google Scholar] [CrossRef]
- Bojarski, M.; Del Testa, D.; Dworakowski, D.; Firner, B.; Flepp, B.; Goyal, P.; Jackel, L.D.; Monfort, M.; Muller, U.; Zhang, J. End to end learning for self-driving cars. arXiv 2016, arXiv:1604.07316. [Google Scholar]
- Yu, S.; Ma, J. Deep Learning for Geophysics: Current and Future Trends. Rev. Geophys. 2021, 59, e2021R–e2742R. [Google Scholar] [CrossRef]
- Jia, Y.; Ma, J. What can machine learning do for seismic data processing? An interpolation application. Geophysics 2017, 82, V163–V177. [Google Scholar] [CrossRef]
- Hu, L.; Zheng, X.; Duan, Y.; Yan, X.; Hu, Y.; Zhang, X. First-arrival picking with a U-net convolutional network. Geophysics 2019, 84, U45–U57. [Google Scholar] [CrossRef]
- Ma, Y.; Cao, S.; Rector, J.W.; Zhang, Z. Automated arrival-time picking using a pixel-level network. Geophysics 2020, 85, V415–V423. [Google Scholar] [CrossRef]
- Araya-Polo, M.; Dahlke, T.; Frogner, C.; Zhang, C.; Poggio, T.; Hohl, D. Automated fault detection without seismic processing. Lead. Edge. 2017, 36, 208–214. [Google Scholar] [CrossRef]
- Xiong, W.; Ji, X.; Ma, Y.; Wang, Y.; AlBinHassan, N.M.; Ali, M.N.; Luo, Y. Seismic fault detection with convolutional neural network. Geophysics 2018, 83, O97–O103. [Google Scholar] [CrossRef]
- Wu, X.; Liang, L.; Shi, Y.; Fomel, S. FaultSeg3D: Using synthetic data sets to train an end-to-end convolutional neural network for 3D seismic fault segmentation. Geophysics 2019, 84, M35–M45. [Google Scholar] [CrossRef]
- Feng, R.; Grana, D.; Balling, N. Uncertainty quantification in fault detection using convolutional neural networks. Geophysics 2021, 86, M41–M48. [Google Scholar] [CrossRef]
- Tschannen, V.; Delescluse, M.; Ettrich, N.; Keuper, J. Extracting horizon surfaces from 3D seismic data using deep learning. Geophysics 2020, 85, N17–N26. [Google Scholar] [CrossRef]
- Geng, Z.; Wu, X.; Shi, Y.; Fomel, S. Deep learning for relative geologic time and seismic horizons. Geophysics 2020, 85, A87–A100. [Google Scholar] [CrossRef]
- Zhang, H.; Zhu, P.; Gu, Y.; Li, X. Automatic velocity picking based on deep learning. In SEG Technical Program Expanded Abstracts: Society of Exploration Geophysicists; Society of Exploration Geophysicists: Houston, TX, USA, 2019; pp. 2604–2608. [Google Scholar]
- Park, M.J.; Sacchi, M.D. Automatic velocity analysis using convolutional neural network and transfer learning. Geophysics 2019, 85, V33–V43. [Google Scholar] [CrossRef]
- Muller, A.P.O.; Costa, J.C.; Bom, C.R.; Faria, E.L.; Klatt, M.; Teixeira, G.; de Albuquerque, M.P.; de Albuquerque, M.P. Complete identification of complex salt geometries from inaccurate migrated subsurface offset gathers using deep learning. Geophysics 2022, 87, R453–R463. [Google Scholar] [CrossRef]
- Choi, S.; Götze, H.J.; Meyer, U.; Desire, G. 3-D density modelling of underground structures and spatial distribution of salt diapirism in the Dead Sea Basin. Geophys. J. Int. 2011, 184, 1131–1146. [Google Scholar] [CrossRef]
- Hassanpour, J.; Yassaghi, A.; Muñoz, J.A.; Jahani, S. Salt tectonics in a double salt-source layer setting (Eastern Persian Gulf, Iran): Insights from interpretation of seismic profiles and sequential cross-section restoration. Basin Res. 2021, 33, 159–185. [Google Scholar] [CrossRef]
- Jianbo, S.; Malik, J. Normalized cuts and image segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2000, 22, 888–905. [Google Scholar] [CrossRef]
- Lomask, J.; Clapp, B.; Biondi, B. Parallel Implementation of Image Segmentation for Tracking 3D Salt Boundaries. In Proceedings of the 68th EAGE Conference and Exhibition incorporating SPE EUROPEC 2006: European Association of Geoscientists & Engineers, Vienna, Austria, 12–15 June 2006; pp. 1–4. [Google Scholar]
- Zhou, J.; Zhang, Y.; Chen, Z.; Li, J. Detecting boundary of salt dome in seismic data with edge detection technique. In Proceedings of the SEG Technical Program Expanded Abstracts: Society of Exploration Geophysicists, San Antonio, TX, USA, 23 September 2007; pp. 1392–1396. [Google Scholar]
- Aqrawi, A.A.; Boe, T.H.; Barros, S. Detecting salt domes using a dip guided 3D Sobel seismic attribute. In Proceedings of the SEG Technical Program Expanded Abstracts: Society of Exploration Geophysicists, San Antonio, TX, USA, 18–23 September 2011; pp. 1014–1018. [Google Scholar]
- Berthelot, A.; Solberg, A.H.S.; Gelius, L. Texture attributes for detection of salt. J. Appl. Geophys. 2013, 88, 52–69. [Google Scholar] [CrossRef]
- Shafiq, M.A.; Wang, Z.; Amin, A.; Hegazy, T.; Deriche, M.; AlRegib, G. Detection of Salt-dome Boundary Surfaces in Migrated Seismic Volumes Using Gradient of Textures. In SEG Technical Program Expanded Abstracts: Society of Exploration Geophysicists; Society of Exploration Geophysicists: Houston, TX, USA, 2015; pp. 1811–1815. [Google Scholar]
- Wang, Z.; Hegazy, T.; Long, Z.; AlRegib, G. Noise-robust detection and tracking of salt domes in postmigrated volumes using texture, tensors, and subspace learning. Geophysics 2015, 80, D101–D116. [Google Scholar] [CrossRef]
- Ashraf, H.; Mousa, W.A.; Al Dossary, S. Sobel filter for edge detection of hexagonally sampled 3D seismic data. Geophysics 2016, 81, N41–N51. [Google Scholar] [CrossRef]
- Wu, X. Methods to compute salt likelihoods and extract salt boundaries from 3D seismic images. Geophysics 2016, 81, M119–M126. [Google Scholar] [CrossRef]
- Waldeland, A.U.; Solberg, A.H.S.S. Salt Classification Using Deep Learning. In Proceedings of the 79th EAGE Conference and Exhibition 2017, Paris, France, 12–15 June 2017; Volume 2017, pp. 1–5. [Google Scholar]
- Shi, Y.; Wu, X.; Fomel, S. SaltSeg: Automatic 3D salt segmentation using a deep convolutional neural network. Interpret.-J. Bible Theol. 2019, 7, E113–E122. [Google Scholar] [CrossRef]
- Guo, J.; Xu, L.; Ding, J.; He, B.; Dai, S.; Liu, F. A Deep Supervised Edge Optimization Algorithm for Salt Body Segmentation. IEEE Geosci. Remote Sens. Lett. 2021, 18, 1746–1750. [Google Scholar] [CrossRef]
- Shi, Y.; Wu, X.; Fomel, S. Interactively tracking seismic geobodies with a deep-learning flood-filling network. Geophysics 2020, 86, A1–A5. [Google Scholar] [CrossRef]
- Zhang, H.; Zhu, P.; Liao, Z.; Li, Z. SaltISCG: Interactive Salt Segmentation Method Based on CNN and Graph Cut. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–14. [Google Scholar] [CrossRef]
- Gardner, G.H.F.; Gardner, L.W.; Gregory, A.R. Formation velocity and density: The diagnostic basics for stratigraphic traps. Geophysics 1974, 39, 770–780. [Google Scholar] [CrossRef]
- Caumon, G.; Collon-Drouaillet, P.; Le Carlier De Veslud, C.; Viseur, S.; Sausse, J. Surface-Based 3D Modeling of Geological Structures. Math Geosci. 2009, 41, 927–945. [Google Scholar] [CrossRef]
- Georgsen, F.; Røe, P.; Syversveen, A.R.; Lia, O. Fault displacement modelling using 3D vector fields. Comput. Geosci. 2012, 16, 247–259. [Google Scholar] [CrossRef]
- Wu, X.; Geng, Z.; Shi, Y.; Pham, N.; Fomel, S.; Caumon, G. Building realistic structure models to train convolutional neural networks for seismic structural interpretation. Geophysics 2019, 85, A27–A39. [Google Scholar] [CrossRef]
- Ioffe, S.; Szegedy, C. Batch normalization: Accelerating deep network training by reducing internal covariate shift. In Proceedings of the 32nd International Conference on International Conference on Machine Learning, Lille, France, 6–11 July 2015; pp. 448–456. [Google Scholar]
- Hinton, G.E.; Srivastava, N.; Krizhevsky, A.; Sutskever, I.; Salakhutdinov, R. Improving neural networks by preventing co-adaptation of feature detectors. arXiv 2012, arXiv:1207.0580. [Google Scholar]
- Rajchl, M.; Lee, M.C.H.; Oktay, O.; Kamnitsas, K.; Passerat-Palmbach, J.; Bai, W.; Damodaram, M.; Rutherford, M.A.; Hajnal, J.; Kainz, B.; et al. DeepCut: Object Segmentation From Bounding Box Annotations Using Convolutional Neural Networks. IEEE Trans. Med. Imaging 2017, 36, 674–683. [Google Scholar] [CrossRef]
- Luo, X.; Wang, G.; Song, T.; Zhang, J.; Aertsen, M.; Deprest, J.; Ourselin, S.; Vercauteren, T.; Zhang, S. MIDeepSeg: Minimally interactive segmentation of unseen objects from medical images using deep learning. Med. Image Anal. 2021, 72, 1–15. [Google Scholar] [CrossRef]
- Li, L.; Yao, J.; Liu, Y.; Yuan, W.; Shi, S.; Yuan, S. Optimal Seamline Detection for Orthoimage Mosaicking by Combining Deep Convolutional Neural Network and Graph Cuts. Remote Sens. 2017, 9, 701. [Google Scholar] [CrossRef]
- Wang, Y.; Song, H.; Zhang, Y. Spectral-Spatial Classification of Hyperspectral Images Using Joint Bilateral Filter and Graph Cut Based Model. Remote Sens. 2016, 8, 748. [Google Scholar] [CrossRef]
- Jia, L.; Zhang, T.; Fang, J.; Dong, F. Multiple Kernel Graph Cut for SAR Image Change Detection. Remote Sens. 2021, 13, 725. [Google Scholar] [CrossRef]
- Bao, L.; Lv, X.; Yao, J. Water Extraction in SAR Images Using Features Analysis and Dual-Threshold Graph Cut Model. Remote Sens. 2021, 13, 3465. [Google Scholar] [CrossRef]
- Wang, H.; Wang, Y.; Zhang, Z.; Fu, X.; Zhuo, L.; Xu, M.; Wang, M. Kernelized Multiview Subspace Analysis by Self-Weighted Learning. IEEE Trans. Multimed. 2021, 23, 3828–3840. [Google Scholar] [CrossRef]
- Wang, H.; Jiang, G.; Peng, J.; Deng, R.; Fu, X. Towards Adaptive Consensus Graph: Multi-view Clustering via Graph Collaboration. IEEE Trans. Multimed. 2022, 1–13. [Google Scholar] [CrossRef]
- Wang, H.; Yao, M.; Jiang, G.; Mi, Z.; Fu, X. Graph-Collaborated Auto-Encoder Hashing for Multiview Binary Clustering. IEEE Trans. Neural Netw. Learn. Syst. 2023, 1–13. [Google Scholar] [CrossRef]
- Boykov, Y.; Jolly, M. Interactive graph cuts for optimal boundary & region segmentation of objects in N-D images. In Proceedings Eighth IEEE International Conference on Computer Vision, Vancouver, BC, Canada, 7–14 July 2001; pp. 105–112. [Google Scholar]
- Boykov, Y.; Veksler, O.; Zabih, R. Fast approximate energy minimization via graph cuts. IEEE Trans. Pattern Anal. Mach. Intell. 2001, 23, 1222–1239. [Google Scholar] [CrossRef]
- Boykov, Y.; Kolmogorov, V. An experimental comparison of min-cut/max- flow algorithms for energy minimization in vision. IEEE Trans. Pattern Anal. Mach. Intell. 2004, 26, 1124–1137. [Google Scholar] [CrossRef]
- Kolmogorov, V.; Zabin, R. What energy functions can be minimized via graph cuts? IEEE Trans. Pattern Anal. Mach. Intell. 2004, 26, 147–159. [Google Scholar] [CrossRef]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Kingma, D.; Ba, J. Adam: A Method for Stochastic Optimization. In Proceedings of the International Conference on Learning Representations, Banff, AB, Canada, 14–16 April 2014. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Training/Testing | Method | Accuracy | Precision | Recall | F1 |
|---|---|---|---|---|---|
| 1:4 | 3DU-net | 0.7245 | 0.6578 | 0.7034 | 0.7159 |
| 3DU-net-EDMs | 0.8151 | 0.7483 | 0.7702 | 0.8086 | |
| 3DU-net-EDMs-GC | 0.8962 | 0.8519 | 0.8733 | 0.8607 | |
| 4:1 | 3DU-net | 0.8893 | 0.8435 | 0.8714 | 0.8697 |
| 3DU-net-EDMs | 0.9245 | 0.8847 | 0.9070 | 0.8952 | |
| 3DU-net-EDMs-GC | 0.9706 | 0.9097 | 0.9639 | 0.9448 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, H.; Zhu, P.; Liao, Z. SaltISNet3D: Interactive Salt Segmentation from 3D Seismic Images Using Deep Learning. Remote Sens. 2023, 15, 2319. https://doi.org/10.3390/rs15092319
Zhang H, Zhu P, Liao Z. SaltISNet3D: Interactive Salt Segmentation from 3D Seismic Images Using Deep Learning. Remote Sensing. 2023; 15(9):2319. https://doi.org/10.3390/rs15092319
Chicago/Turabian StyleZhang, Hao, Peimin Zhu, and Zhiying Liao. 2023. "SaltISNet3D: Interactive Salt Segmentation from 3D Seismic Images Using Deep Learning" Remote Sensing 15, no. 9: 2319. https://doi.org/10.3390/rs15092319
APA StyleZhang, H., Zhu, P., & Liao, Z. (2023). SaltISNet3D: Interactive Salt Segmentation from 3D Seismic Images Using Deep Learning. Remote Sensing, 15(9), 2319. https://doi.org/10.3390/rs15092319