

Evaluating Pavement Lane Markings in Metropolitan Road Networks with a Vehicle-Mounted Retroreflectometer and AI-Based Image Processing Techniques



Abstract
1. Introduction
2. Field Investigation Program
2.1. Investigation Plan
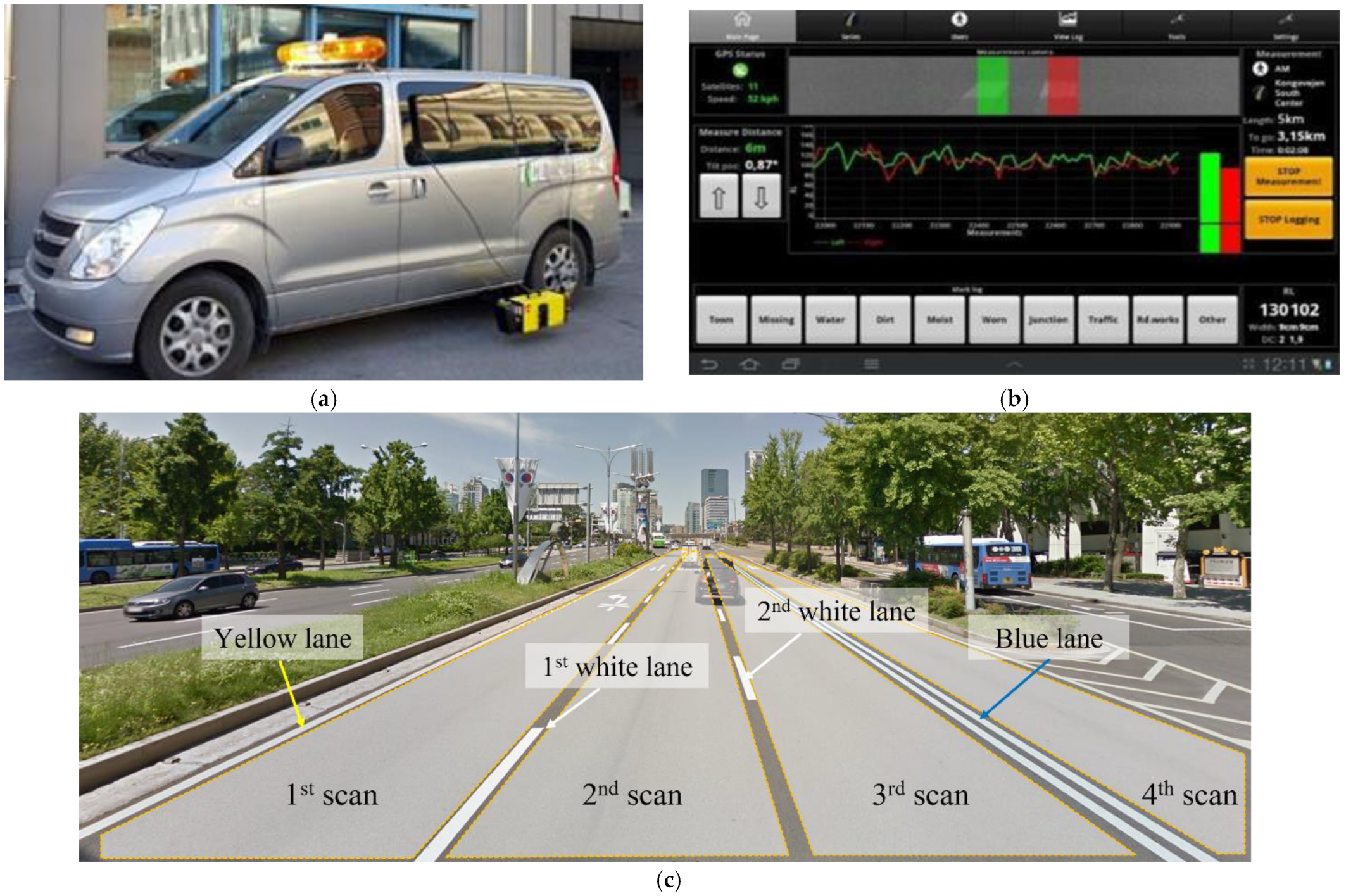
2.2. Investigation Methods
3. Results and Discussion
3.1. Retroreflectivity
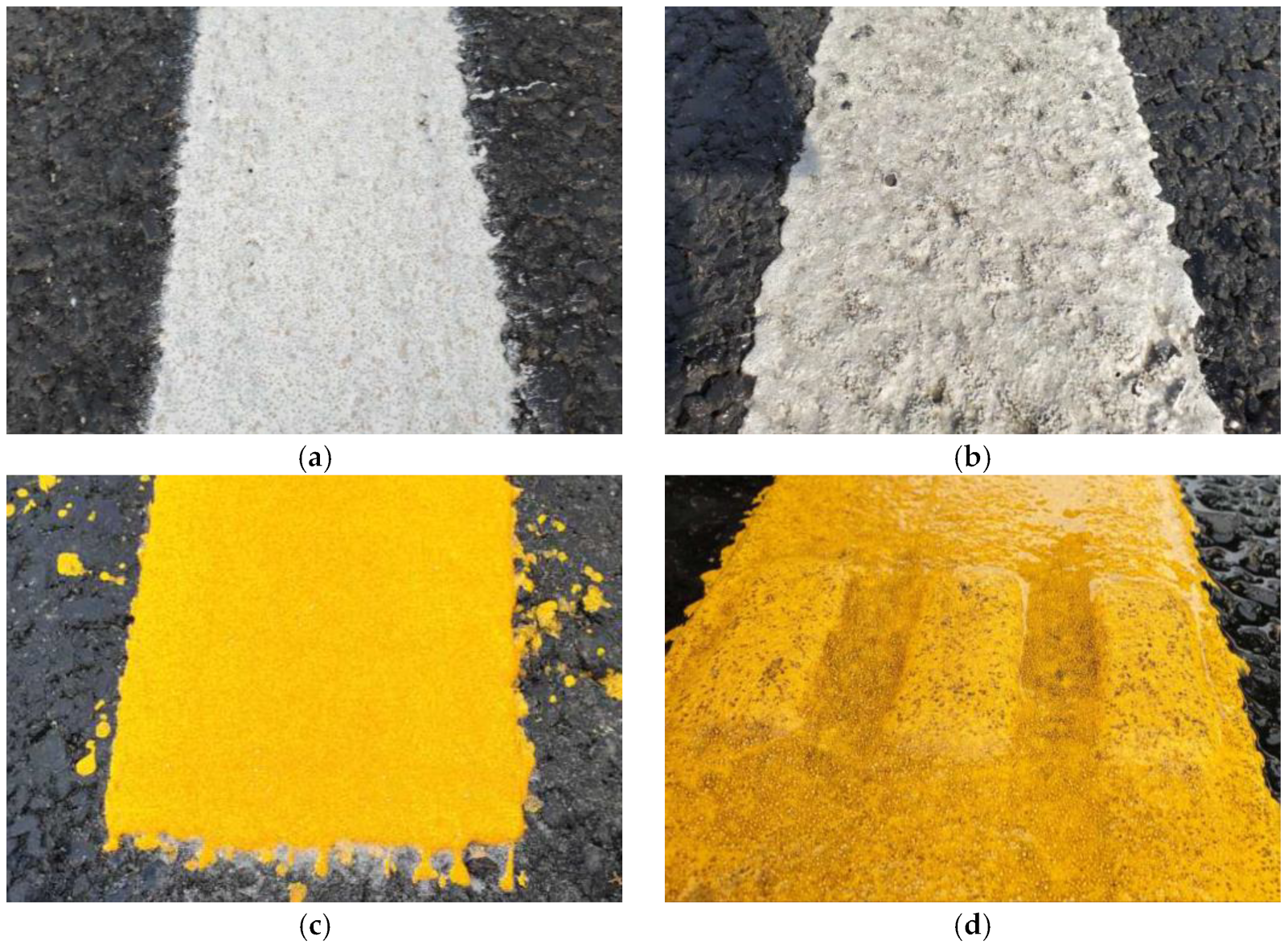
3.2. Lane Marking Defects
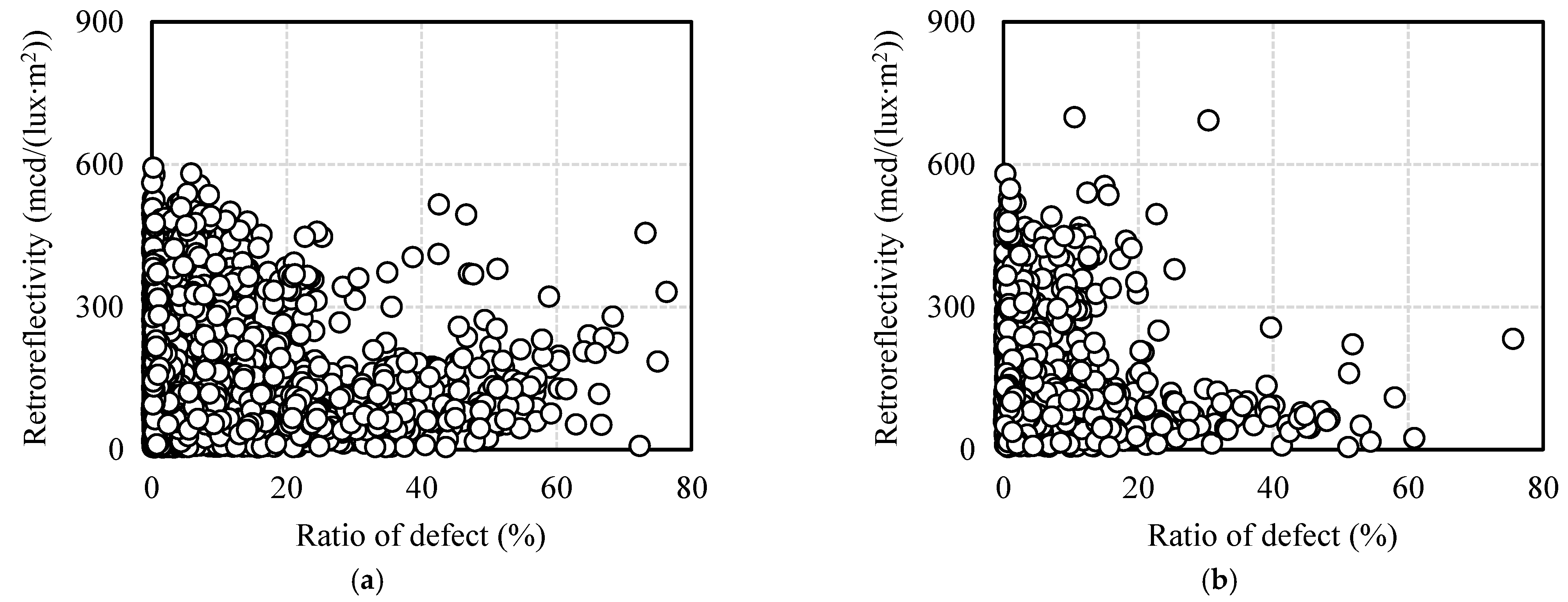
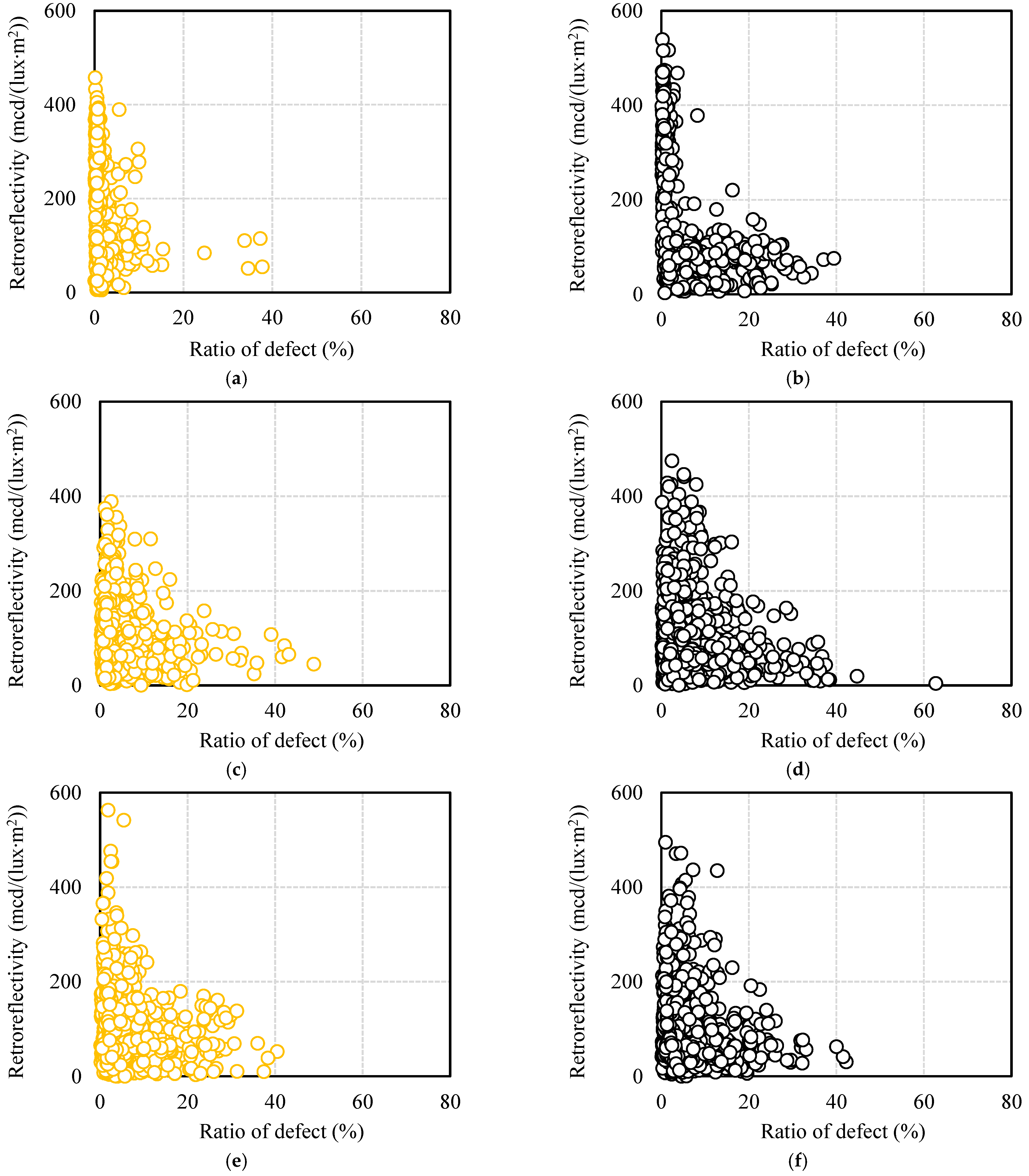
3.3. Retroreflectivity versus Defect Ratio
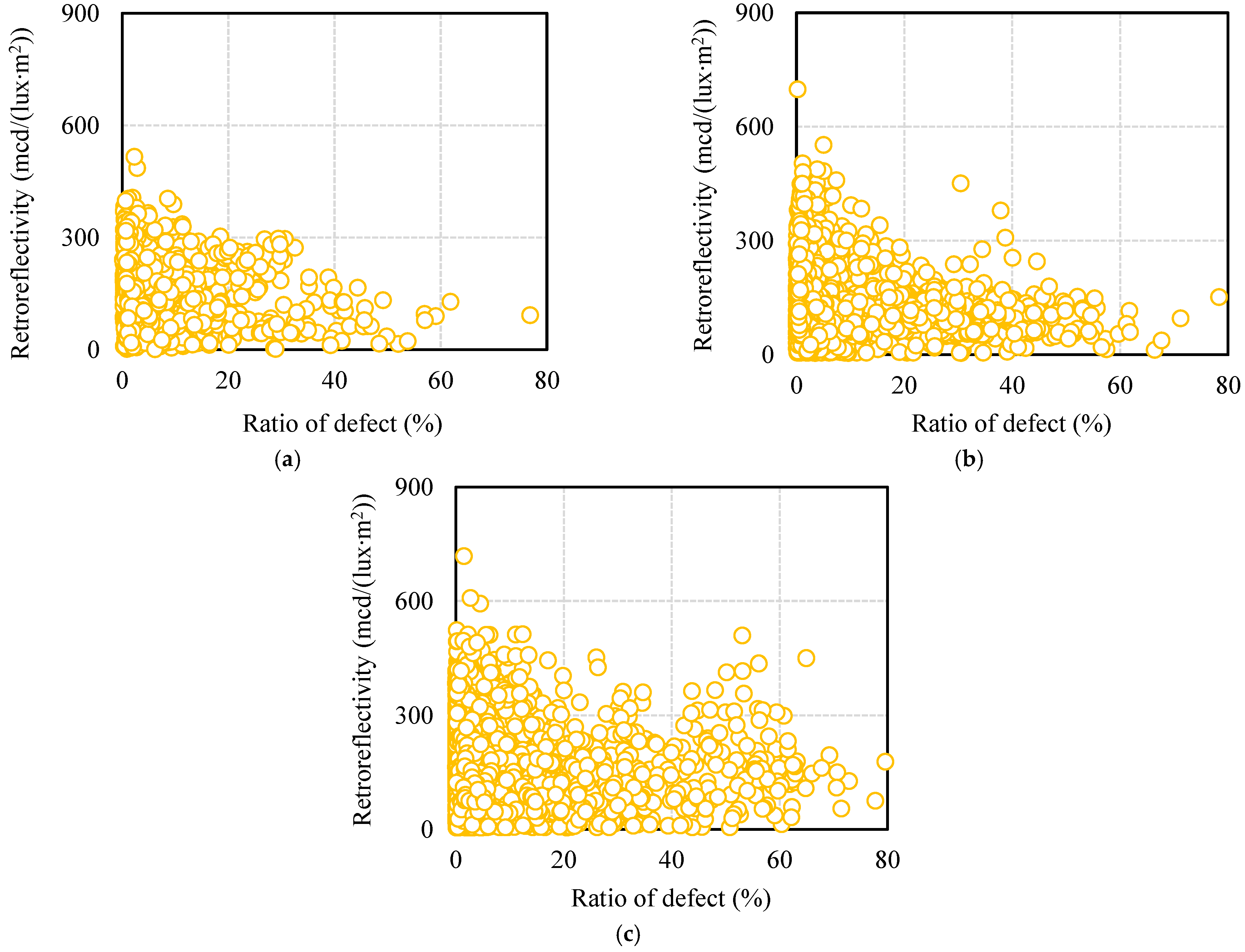
3.4. Yellow-Colored Lane
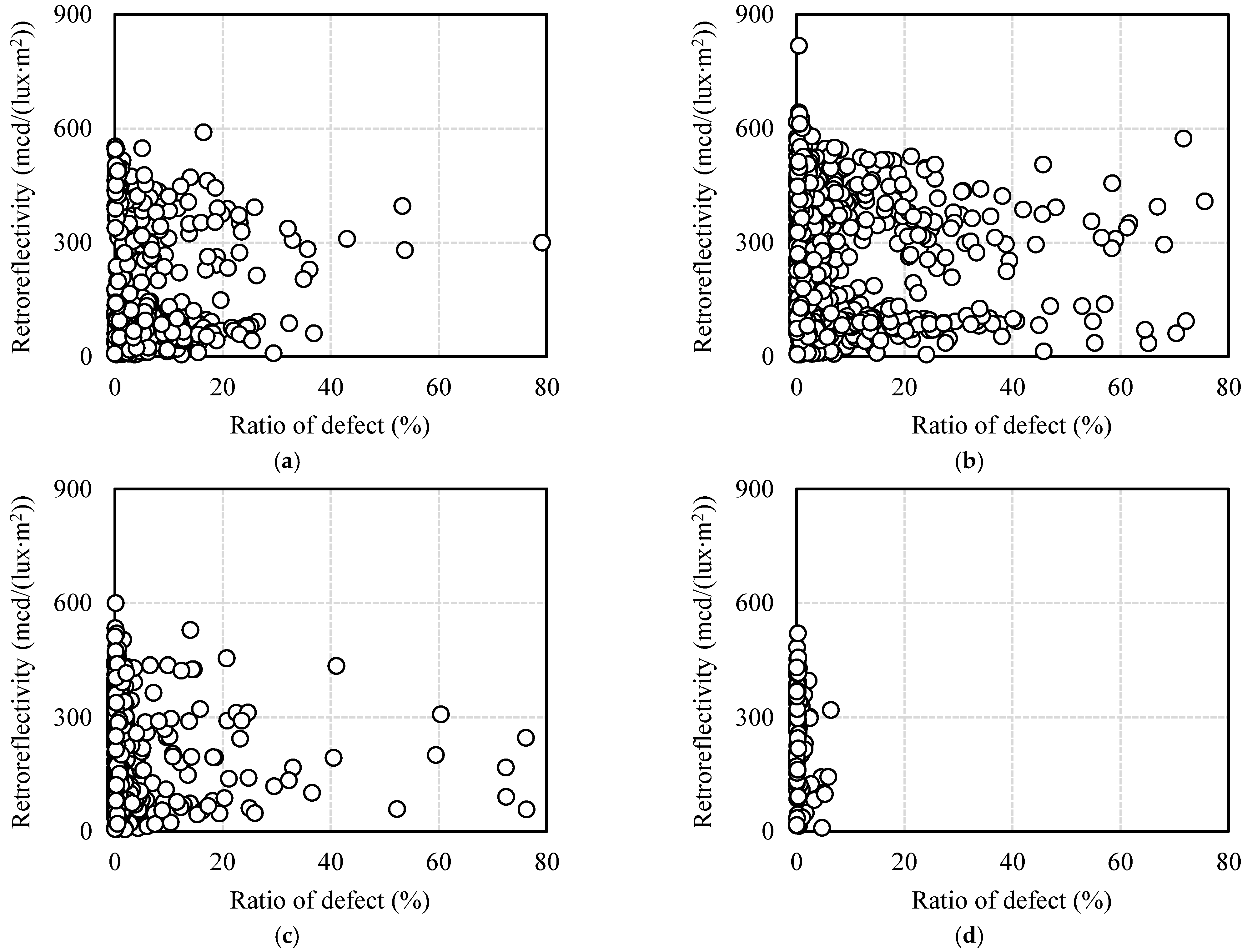
3.5. White-Colored Lanes
4. Development of Maintenance Priority
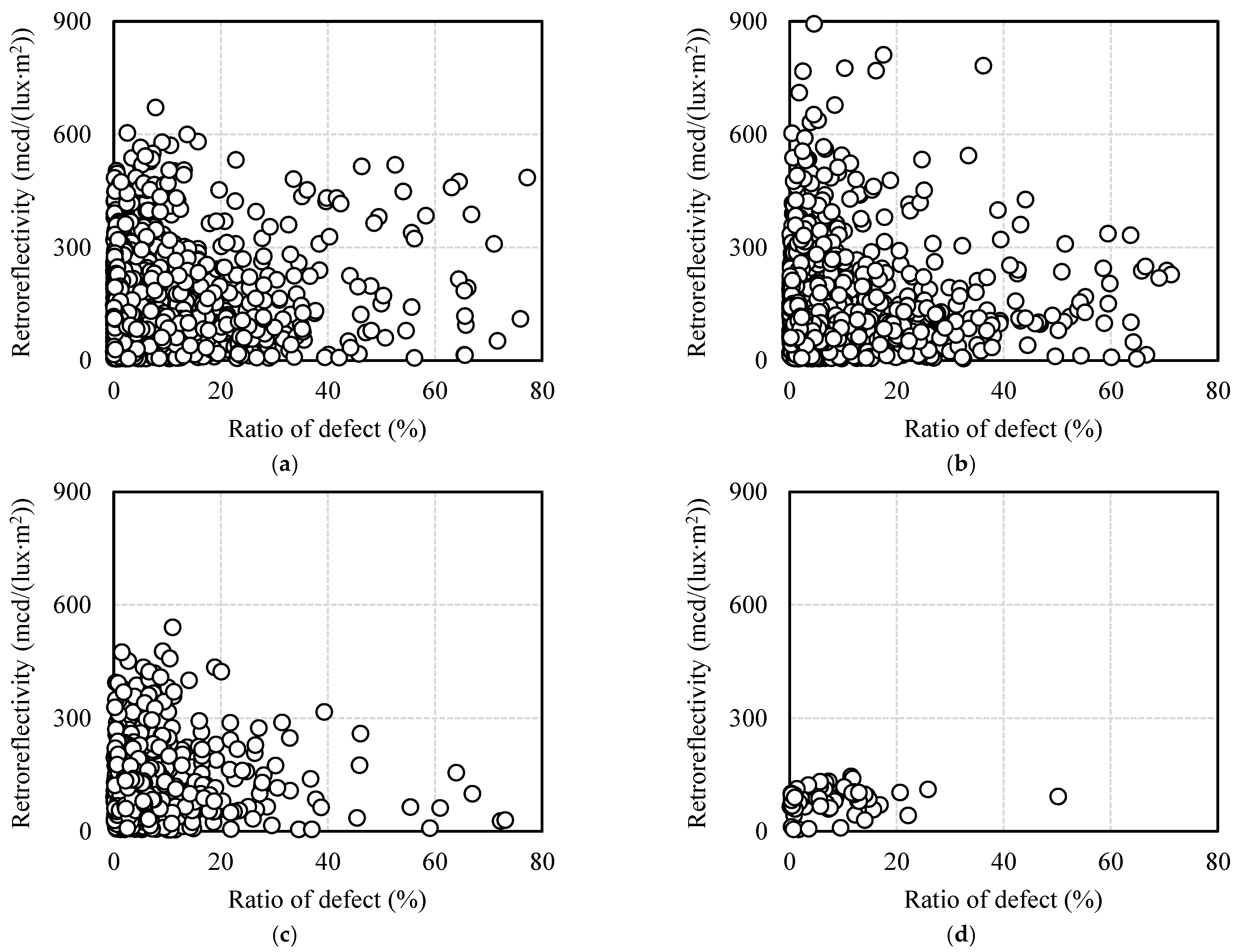
Re-Plotting of Data Distribution by 100 m Average
5. Conclusions
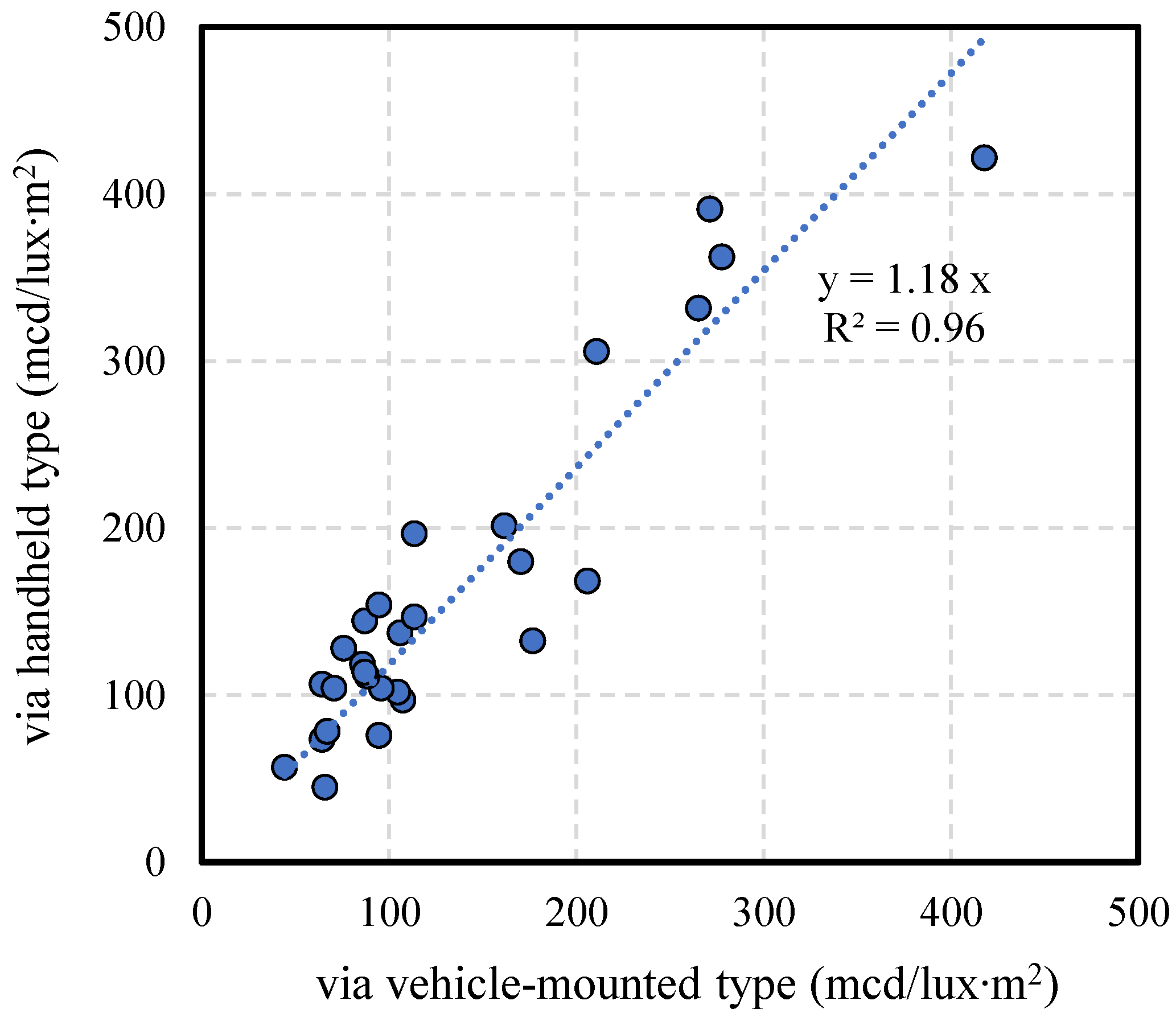
- The vehicle-mounted retroreflectometer and high-resolution camera enabled the continuous and rapid collection of retroreflectivity data and images of the pavement lane markings without traffic controls. Moreover, the measured retroreflectivity values did not show significant differences compared to the values obtained by the handheld device.
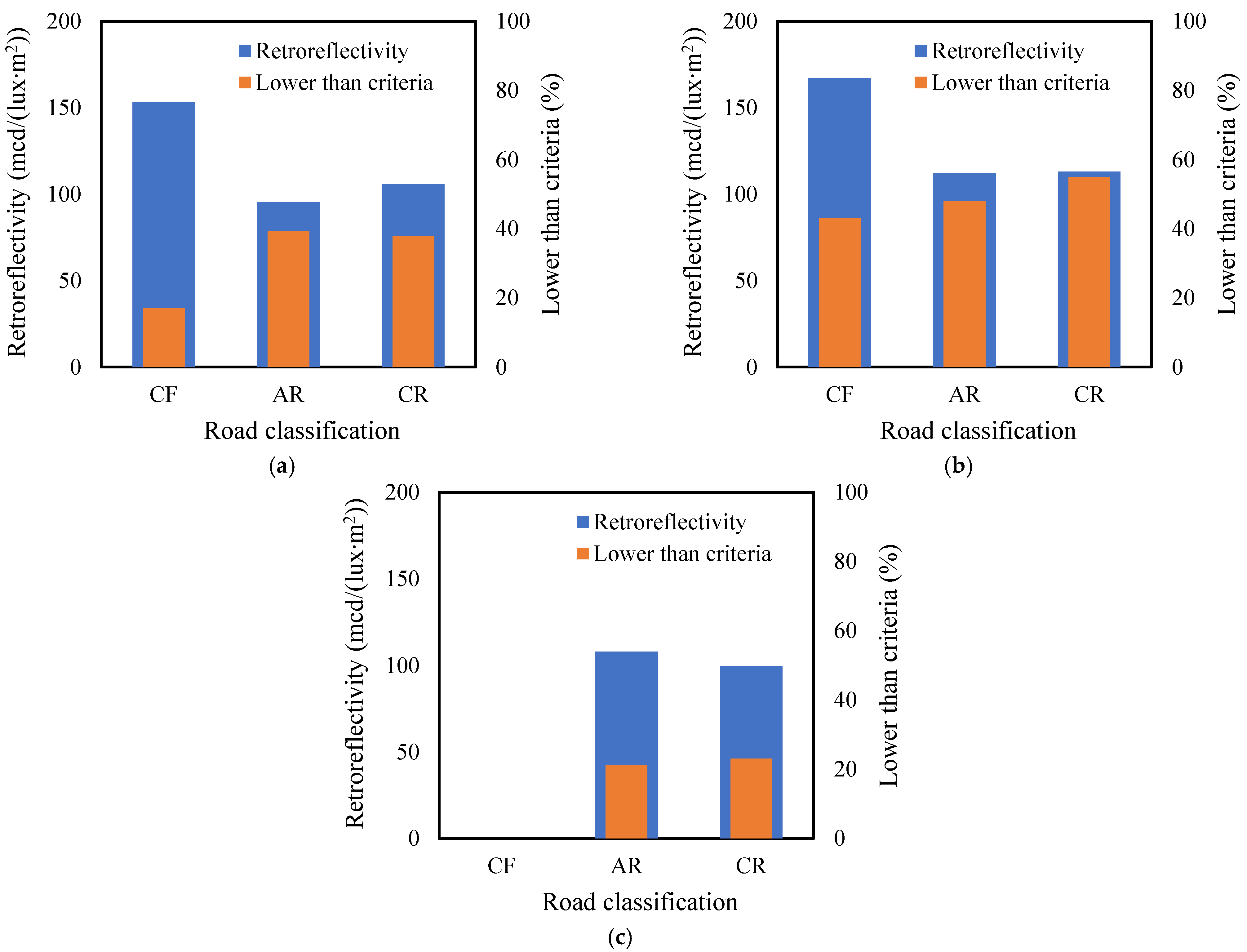
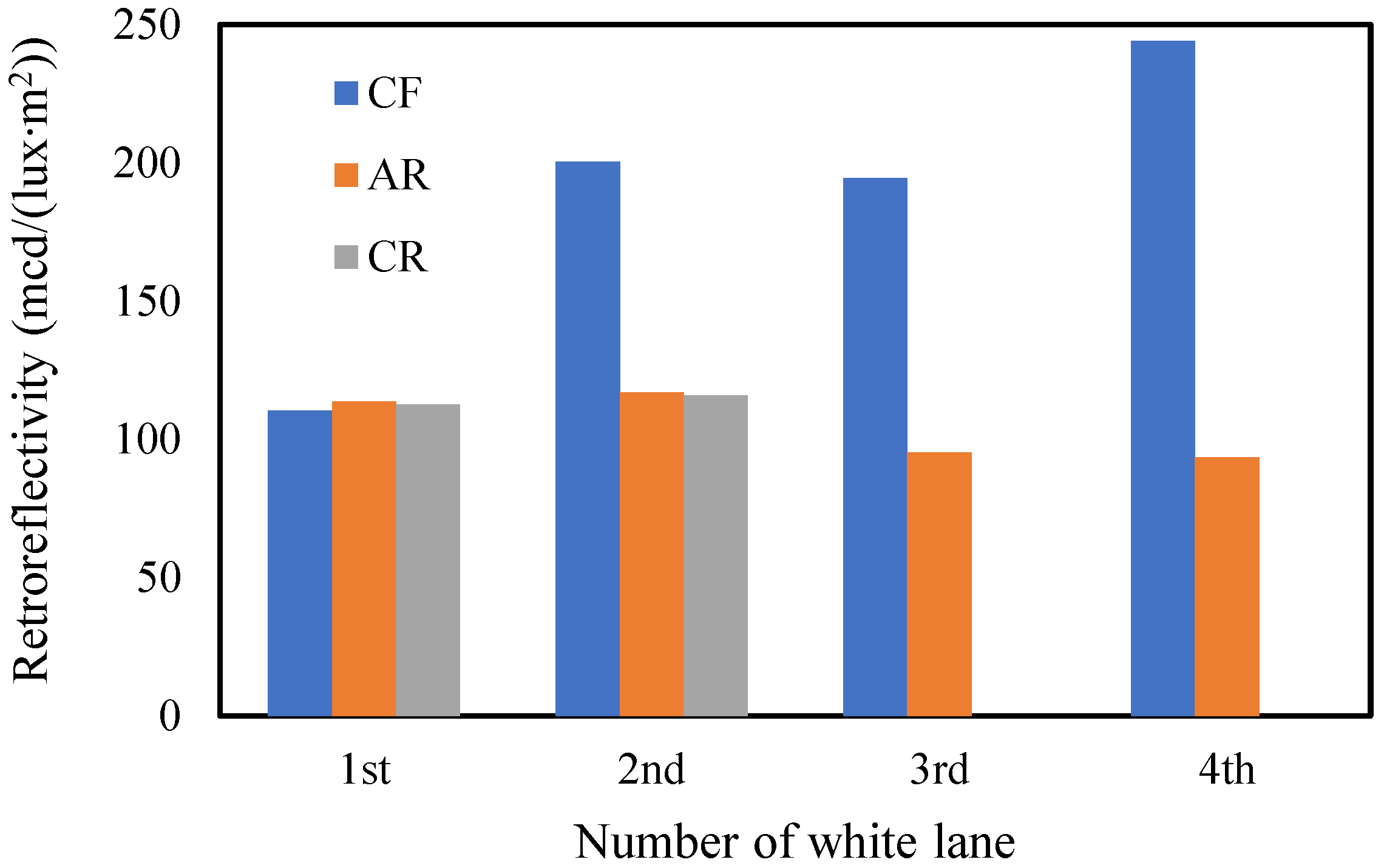
- The average retroreflectivity measured for CF was higher for both yellow and white lanes compared to AR and CR. Moreover, the ratio of lane markings failing to meet the retroreflectivity criteria was lower in case of CF than in AR and CR. In the case of AR and CR, 48% and 55% of the white lanes, respectively, fell below the retroreflectivity criterion of 100 mcd/(lux∙m2), which suggests a significant loss of the retroreflective performance critical for drivers in routine night-time traffic conditions in the case of the white lanes.
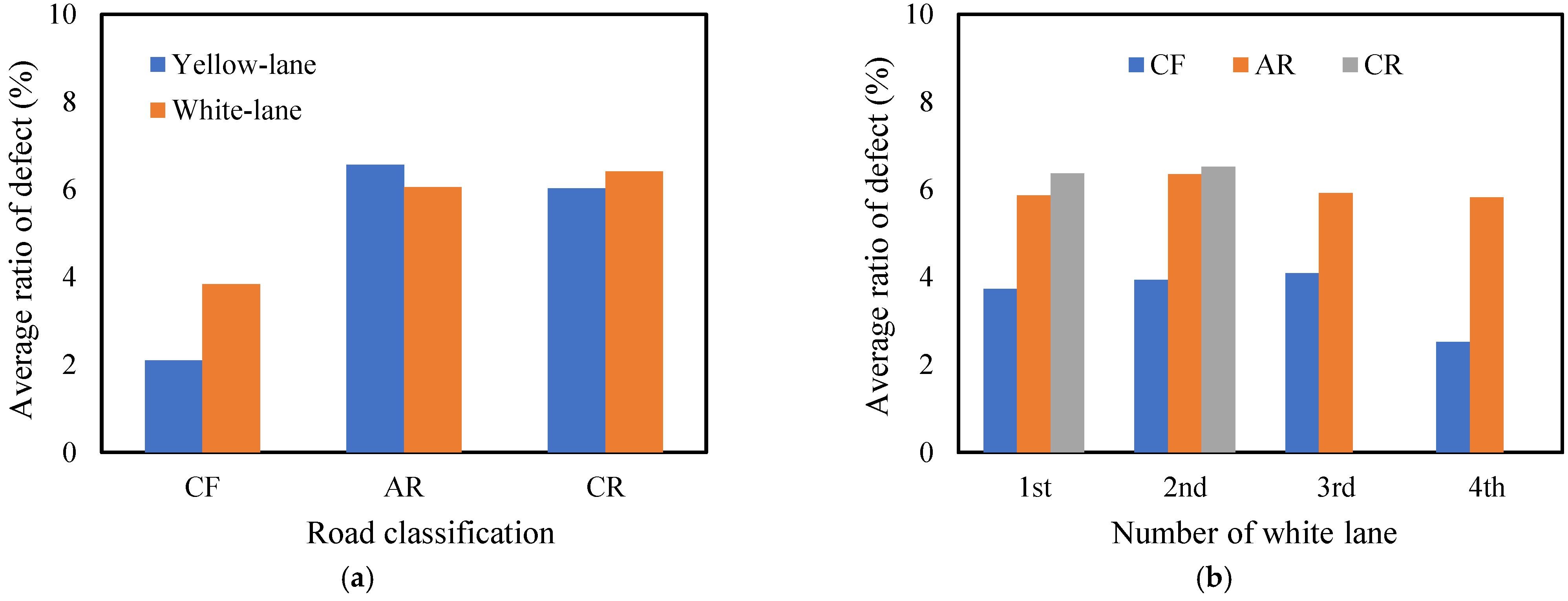
- The calculated defect ratio of CF was lower than those of AR and CR for both yellow and white lanes. For the white lanes of CF, the defect ratio ranged from 2.52% to 4.09%, while the ratios were determined to be between 5.82% and 6.52% for AR and CR. This means that while CF maintains better painting conditions compared to AR and CR, there is no significant difference in the defect ratios of white lanes according to specific road types, suggesting that their visibility to users is similar across different driving lanes during daytime driving.
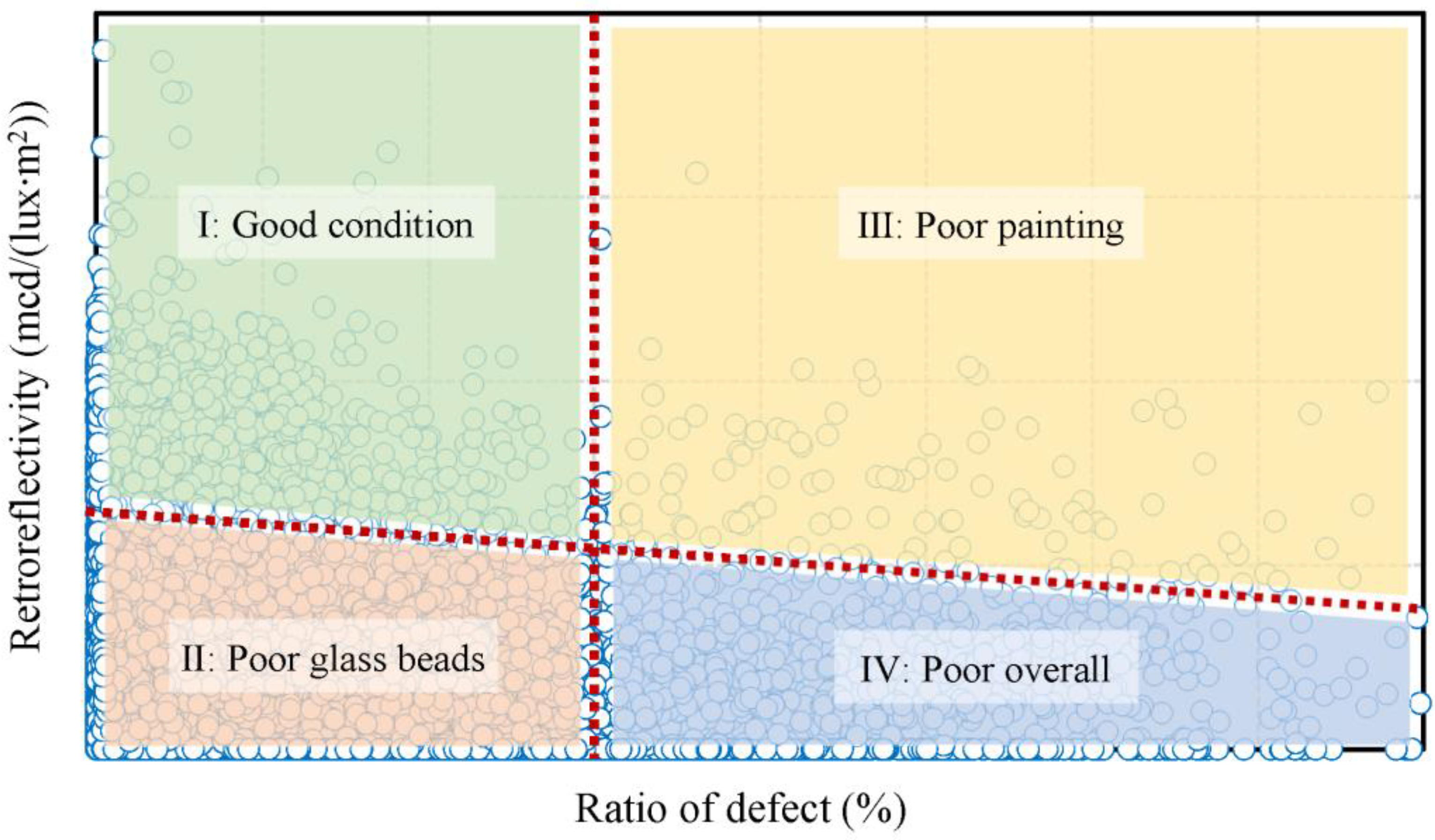
- The data in the dataset consisting of the defect ratio and retroreflectivity values of pavement lane markings were classified into four categories based on the levels of the defect ratio and retroreflectivity. The data distributions indicated a mix of generally good conditions, poor glass beads conditions, and aging conditions. Thus, the occurrence of lane marking defects and low retroreflectivity in some sections may pose a risk to road safety.
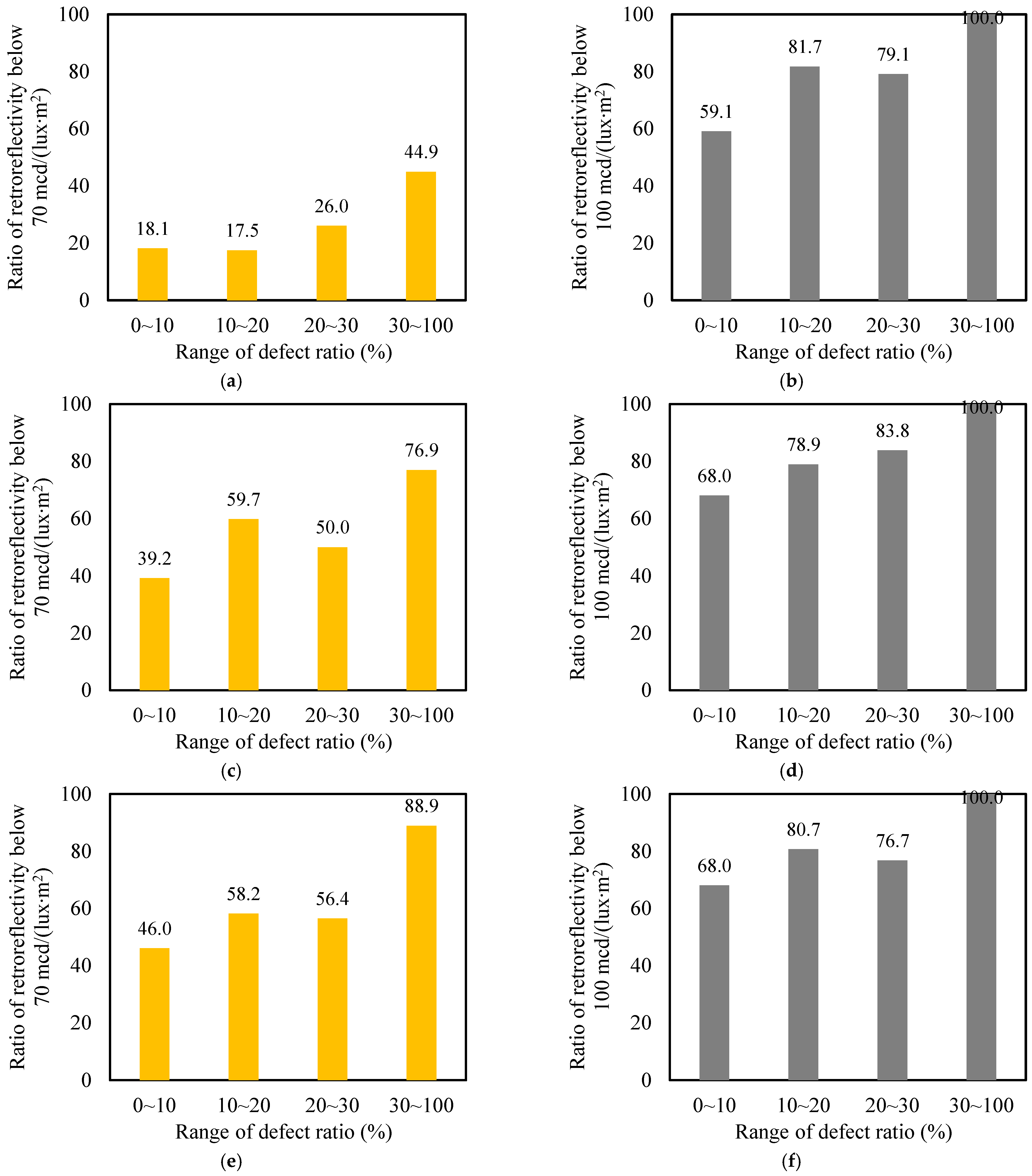
- The unit length of lane markings used for averaging the retroreflectivity and defect ratio can be adjusted to improve work efficiency depending on the work environment. To select maintenance priorities more efficiently, it is better to first categorize the dataset of lane markings by range of the defect ratio. This is because the sections with higher defect ratios typically have poor retroreflectivity; however, not all sections with poor retroreflectivity necessarily have higher defect ratios.
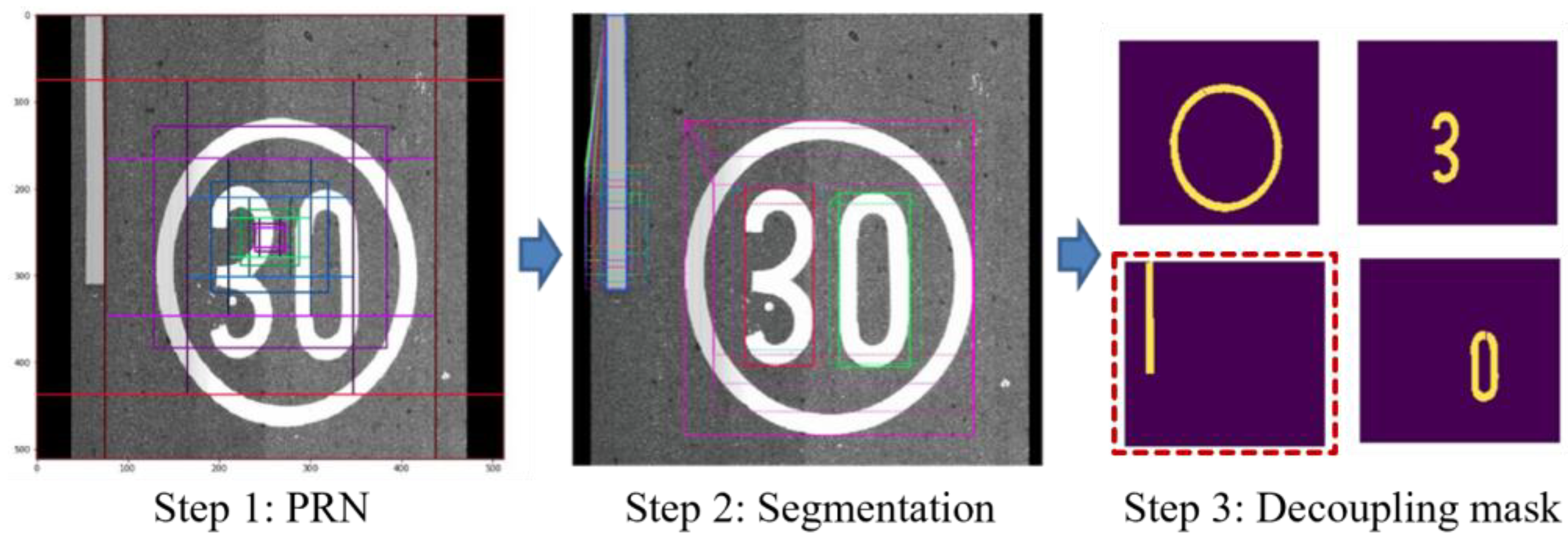
- These research results may potentially be used to improve road safety through the prioritization of maintenance work in areas with poor lane marking retroreflectivity and high defect ratios. Efficient resource allocation can be facilitated by informed decision-making regarding maintenance priorities, leading to cost savings through reduced labor and optimized resource utilization. The AI-based image processing techniques and customizable approaches used in this study may allow for the development of tailored and adaptable maintenance strategies which can be scaled and applied to other regions or road networks. Moreover, these results and methods can serve as a foundation for future research exploring additional factors affecting road safety or investigating the integration of advanced technologies for more sophisticated road maintenance strategies.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Avelar, R.E.; Carlson, P.J. Characterizing the association between nighttime crashes and retroreflectivity of edgelines and centerlines on Michigan rural two-lane highways. In Proceedings of the 93rd Annual Meeting of the Transportation Research Record, Washington, DC, USA, 12–16 January 2014. [Google Scholar]
- Migletz, J.; Graham, J.L. Long-Term Pavement Marking Practices: A Synthesis of Highway Practice; Transportation Research Board: Washington, DC, USA, 2002. [Google Scholar]
- Smadi, O.; Hawkins, N.; Nlenanya, I.; Bektaş, B.A. Pavement Markings and Safety; Minnesota State University: Mankato, MN, USA, 2010. [Google Scholar]
- Smadi, O.; Souleyrette, R.R.; Ormand, D.J.; Hawkins, N. Pavement marking retroreflectivity: Analysis of safety effectiveness. Transp. Res. Rec. 2008, 2056, 17–24. [Google Scholar] [CrossRef]
- Zhang, G.; Hummer, J.E.; Rasdorf, W. Impact of bead density on paint pavement marking retroreflectivity. J. Transp. Eng. 2010, 136, 773–781. [Google Scholar] [CrossRef]
- Bahar, G.; Masliah, M.; Erwin, T.; Tan, E.; Hauer, E. Pavement Marking Materials and Markers: Real-World Relationship between Retroreflectivity and Safety over Time; Transportation Research Board: Washington, DC, USA, 2006. [Google Scholar]
- Mull, D.M.; Sitzabee, W.E. Paint pavement marking performance prediction model. J. Transp. Eng. 2012, 138, 618–624. [Google Scholar] [CrossRef]
- Jiang, Y. Durability and Retro-Reflectivity of Pavement Markings (Synthesis Study); Joint Transportation Research Program, Indiana Department of Transportation and Purdue University: West Lafayette, IN, USA, 2008. [Google Scholar]
- Parker, N.A.; Meja, M.S.J. Evaluation of performance of permanent pavement markings. Transp. Res. Rec. J. Transp. Res. Board 2003, 1824, 123–132. [Google Scholar] [CrossRef]
- Xu, S.; Wang, J.; Wu, P.; Shou, W.; Wang, X.; Chen, M. Vision-based pavement marking detection and condition assessment—A case study. Appl. Sci. 2021, 11, 3152. [Google Scholar] [CrossRef]
- Burghardt, T.E.; Popp, R.; Helmreich, B.; Reiter, T.; Böhm, G.; Pitterle, G.; Artmann, M. Visibility of various road markings for machine vision. Case Stud. Constr. Mater. 2021, 15, e00579. [Google Scholar] [CrossRef]
- Babić, D.; Babić, D.; Fiolić, M.; Eichberger, A.; Magosi, Z.F. Impact of road marking retroreflectivity on machine vision in dry conditions: On-road test. Sensors 2022, 22, 1303. [Google Scholar] [CrossRef] [PubMed]
- Inzerillo, L.; Di Mino, G.; Roberts, R. Image-based 3D reconstruction using traditional and UAV datasets for analysis of road pavement distress. Autom. Constr. 2018, 96, 457–469. [Google Scholar] [CrossRef]
- Alzraiee, H.; Ruiz, A.L.; Sprotte, R. Detecting of pavement marking defects using faster R-CNN. J. Perform. Constr. Facil. 2021, 35, 04021035. [Google Scholar] [CrossRef]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster R-CNN: Towards real-time object detection with region proposal networks. arXiv 2015, arXiv:1506.01497v3. [Google Scholar] [CrossRef] [PubMed]
- Pike, A.M.; Ballard, L.D.; Carlson, P.J. Evaluation of retroreflectivity measurement techniques for profiled and rumble stripe pavement markings. Transp. Res. Rec. J. Transp. Res. Board 2011, 2258, 80–87. [Google Scholar] [CrossRef]
- Re, J.M.; Carlson, P.J. Practices to Manage Traffic Sign Retroreflectivity; Transportation Research Board: Washington, DC, USA, 2012. [Google Scholar]
- Yang, P.; Song, W.; Zhao, X.; Zheng, R.; Qingge, L. An improved Otsu threshold segmentation algorithm. Int. J. Comput. Sci. Eng. 2020, 22, 146–153. [Google Scholar] [CrossRef]
- Marzougui, M.; Alasiry, A.; Kortli, Y.; Baili, J. A lane tracking method based on progressive probabilistic hough transform. IEEE Access 2020, 8, 84893–84905. [Google Scholar] [CrossRef]
- Han, E.; Kang, J.H.; Kim, C.H.; Park, S.; Yun, I. Study on the minimum recursive reflection performance according to the color of road surface. J. Korea Inst. Intell. Transp. Syst. 2020, 19, 37–48. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Investigation Item | Road Classification | Color | Total | ||
|---|---|---|---|---|---|
| Yellow | White | Blue | |||
| Retroreflectivity | CF | 378.11 | 1184.51 | - | 1562.62 |
| AR | 777.94 | 1782.70 | 214.05 | 2774.69 | |
| CR | 1048.27 | 1391.80 | 12.96 | 2453.03 | |
| Total | 2204.32 | 4359.01 | 227.01 | 6790.34 | |
| Defect ratio | CF | 10.22 | 64.29 | - | 74.52 |
| AR | 69.86 | 155.61 | - | 225.47 | |
| CR | 93.59 | 109.24 | - | 202.83 | |
| Total | 173.67 | 329.14 | - | 502.82 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, S.; Cho, B.H. Evaluating Pavement Lane Markings in Metropolitan Road Networks with a Vehicle-Mounted Retroreflectometer and AI-Based Image Processing Techniques. Remote Sens. 2023, 15, 1812. https://doi.org/10.3390/rs15071812
Lee S, Cho BH. Evaluating Pavement Lane Markings in Metropolitan Road Networks with a Vehicle-Mounted Retroreflectometer and AI-Based Image Processing Techniques. Remote Sensing. 2023; 15(7):1812. https://doi.org/10.3390/rs15071812
Chicago/Turabian StyleLee, Sangyum, and Byoung Hooi Cho. 2023. "Evaluating Pavement Lane Markings in Metropolitan Road Networks with a Vehicle-Mounted Retroreflectometer and AI-Based Image Processing Techniques" Remote Sensing 15, no. 7: 1812. https://doi.org/10.3390/rs15071812
APA StyleLee, S., & Cho, B. H. (2023). Evaluating Pavement Lane Markings in Metropolitan Road Networks with a Vehicle-Mounted Retroreflectometer and AI-Based Image Processing Techniques. Remote Sensing, 15(7), 1812. https://doi.org/10.3390/rs15071812