
Optimized Spatial Gradient Transfer for Hyperspectral-LiDAR Data Classification




Abstract
:1. Introduction
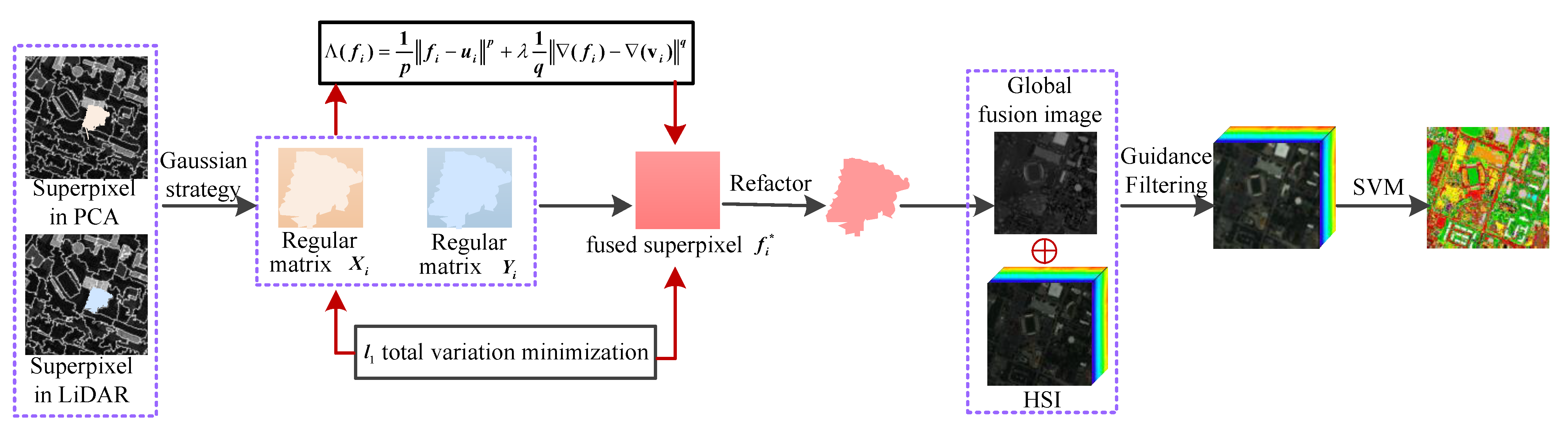
- We define homogeneous region fusion between PC and LiDAR data as a mathematical optimization problem and introduce the gradient transfer model to fuse spectral and DSM information from various superpixel blocks for the first time. It is found that the model can alleviate the heterogeneity of different sources of remote sensing data by optimizing the objective function.
- The -total variation minimization is designed to fuse information between the PC and DSM within each superpixel block to accurately describe the observed details. It is found that the problem of HSI weak boundary affected by the weather can be effectively overcome.
- The proposed OSGT algorithm can fully extract the complementary features in the homogeneous regions corresponding to HSI and LiDAR to further promote classification of ground coverings competitive methods.
2. Related Work
2.1. Entropy Rate Superpixel (ERS)
2.2. Guided Filtering
3. Proposed Approach
| Algorithm 1: OSGT. |
Inputs: the HSI H; LiDAR data L; the number of superpixel ; the control parameter ; the training set T; and test set t; Outputs: Classification result; 1. Superpixel Oversegmentation For i = 1: Regularization strategy transforms and into and End 2. optimize spatial gradient transfer algorithm For i = 1: Determine , by Equations (8)–(12) Obtain the fused superpixel blocks Reconstruct the fused superpixel blocks End for Generate the fused image F 3. Classification Apply SVM to classify |
3.1. Oversegmentation
3.2. The Proposed OSGT Method
3.3. Classification for HSI and LiDAR Data
3.4. Extension Method
| Algorithm 2: BG-OSGT. |
Inputs:H; L; ; ; T; and t; Outputs: Classification result; 1. Superpixel Oversegmentation For i = 1: Regularization strategy transforms and into and End 2. optimize spatial gradient transfer algorithm For i = 1: Determine , by Equations (8)–(12) Obtain the fused superpixel blocks Reconstruct the fused superpixel blocks End for Generate the fused image F 3. Classification Apply band grouping strategy to the filtered result Multi-branch classification and decision fusion by using SVM |
| Algorithm 3: MOSGT. |
Inputs:H; L; ; ; T; and t; Outputs: Classification result; 1. Extract the first three principal components of H, where 2. Oversegmented and L by using ERS method, and then generate oversegmented maps and 3. Apply Gaussian regularization strategy to and 4. Fusion of and according to (8)–(12) 5. Obtain the fused superpixel blocks 6. Reconstruct the fused superpixel blocks 7. Generate the fused image set 8. Use as the guided images to filter H, by Equation (13) 9. Classify filtering feature images and decision fusion strategy. |
4. Experimental Results
4.1. Datasets
4.2. Quality Indexes
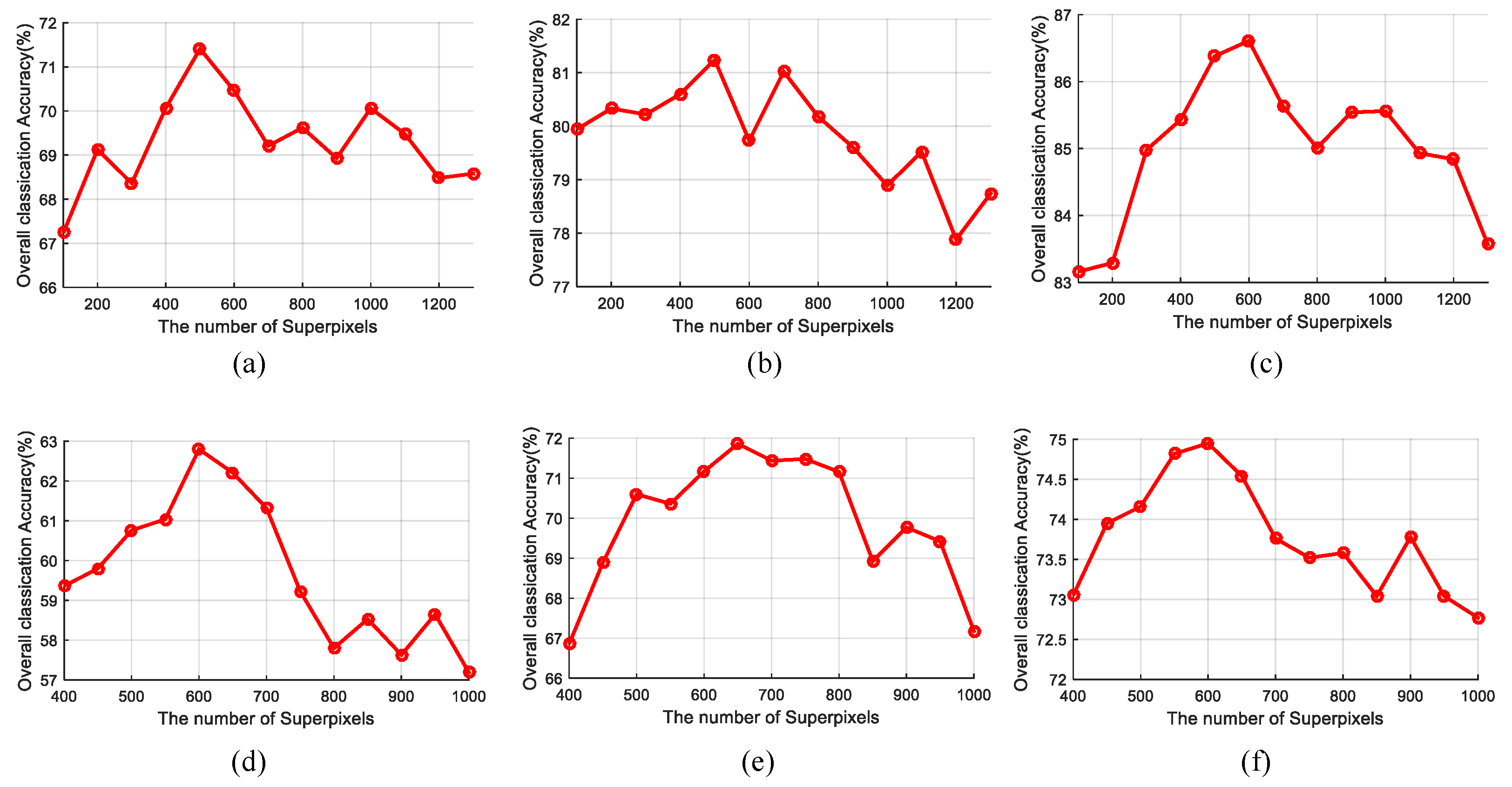
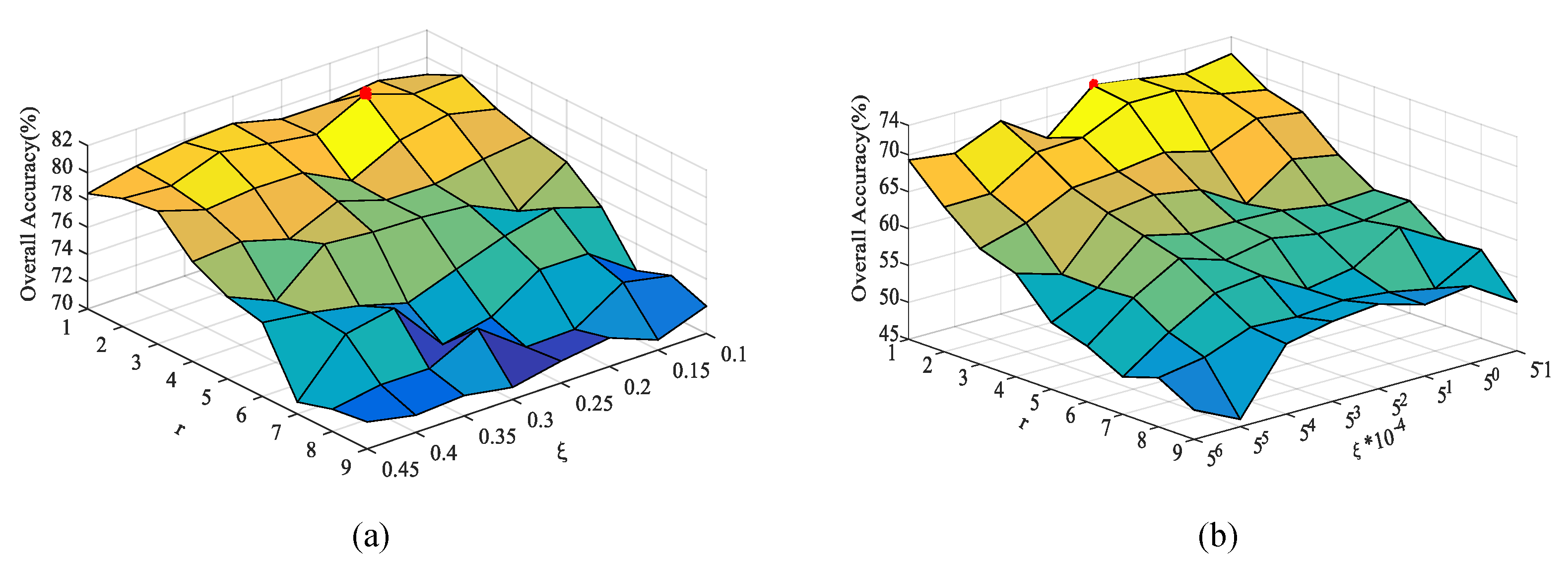
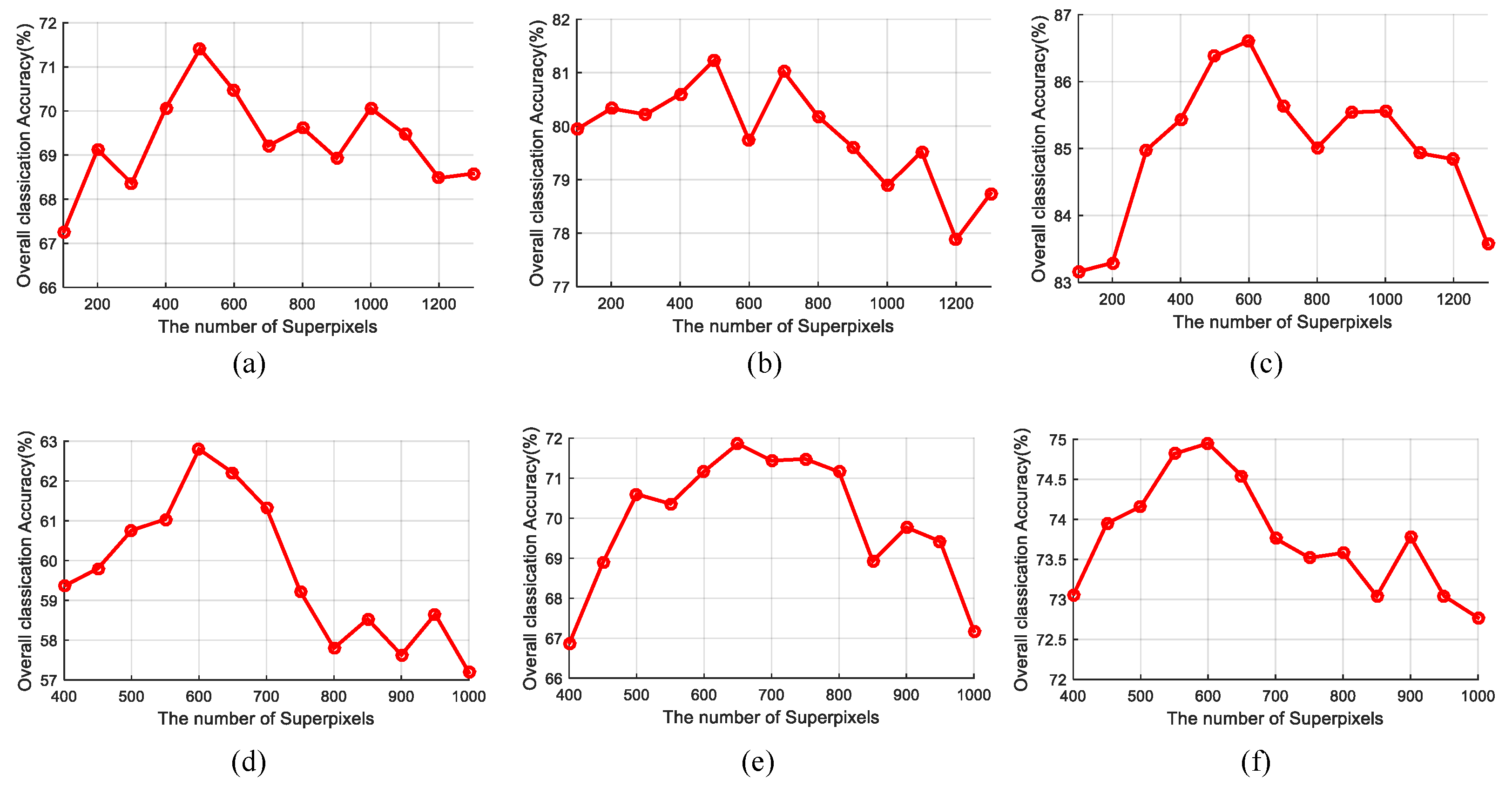
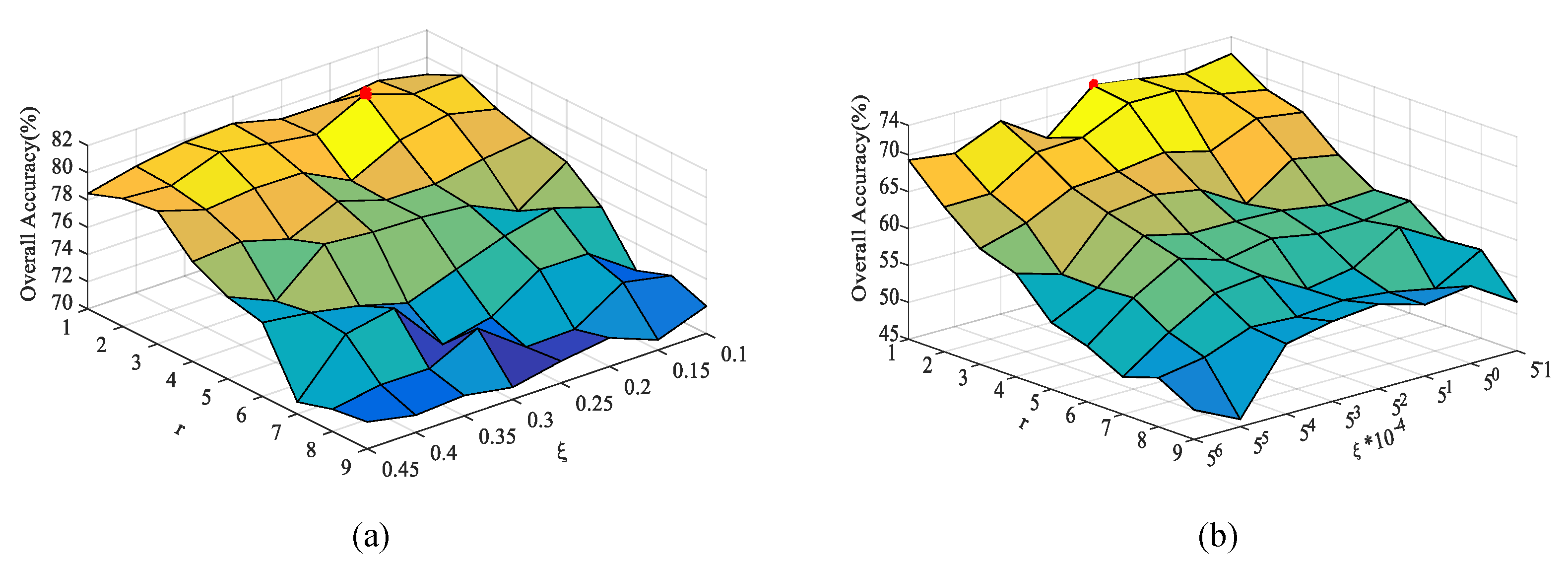
4.3. Analysis of Parameters Influence
4.4. Analysis of Auxiliary between HSI and LiDAR Data
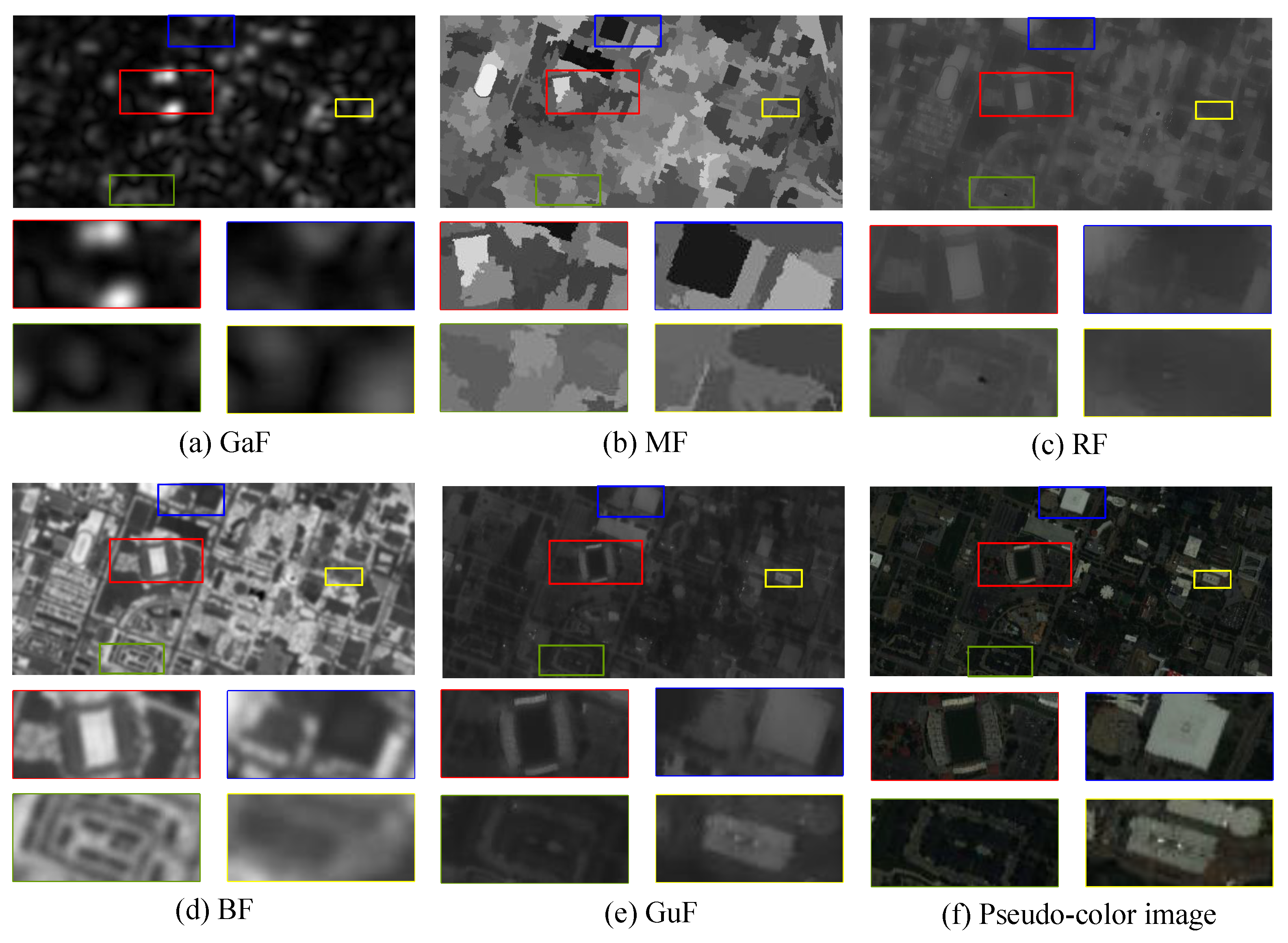
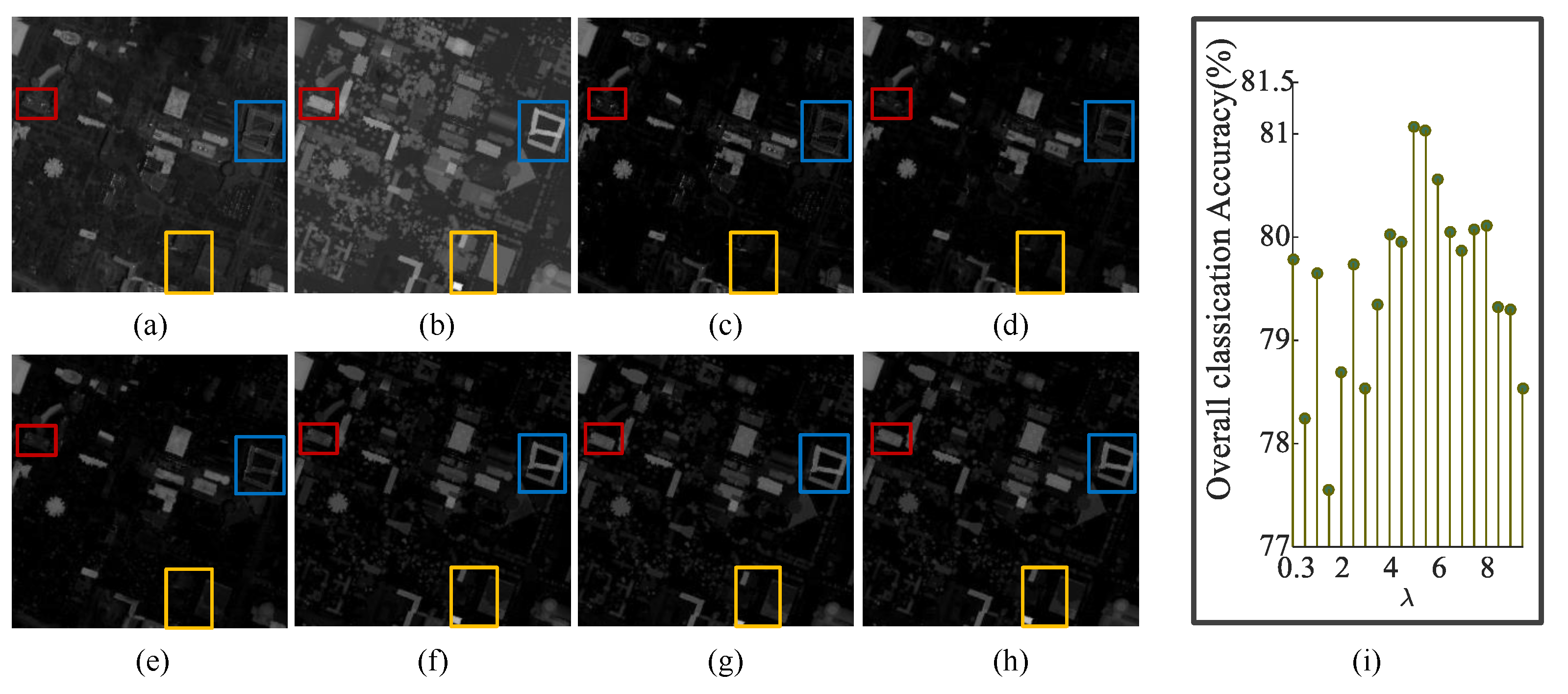
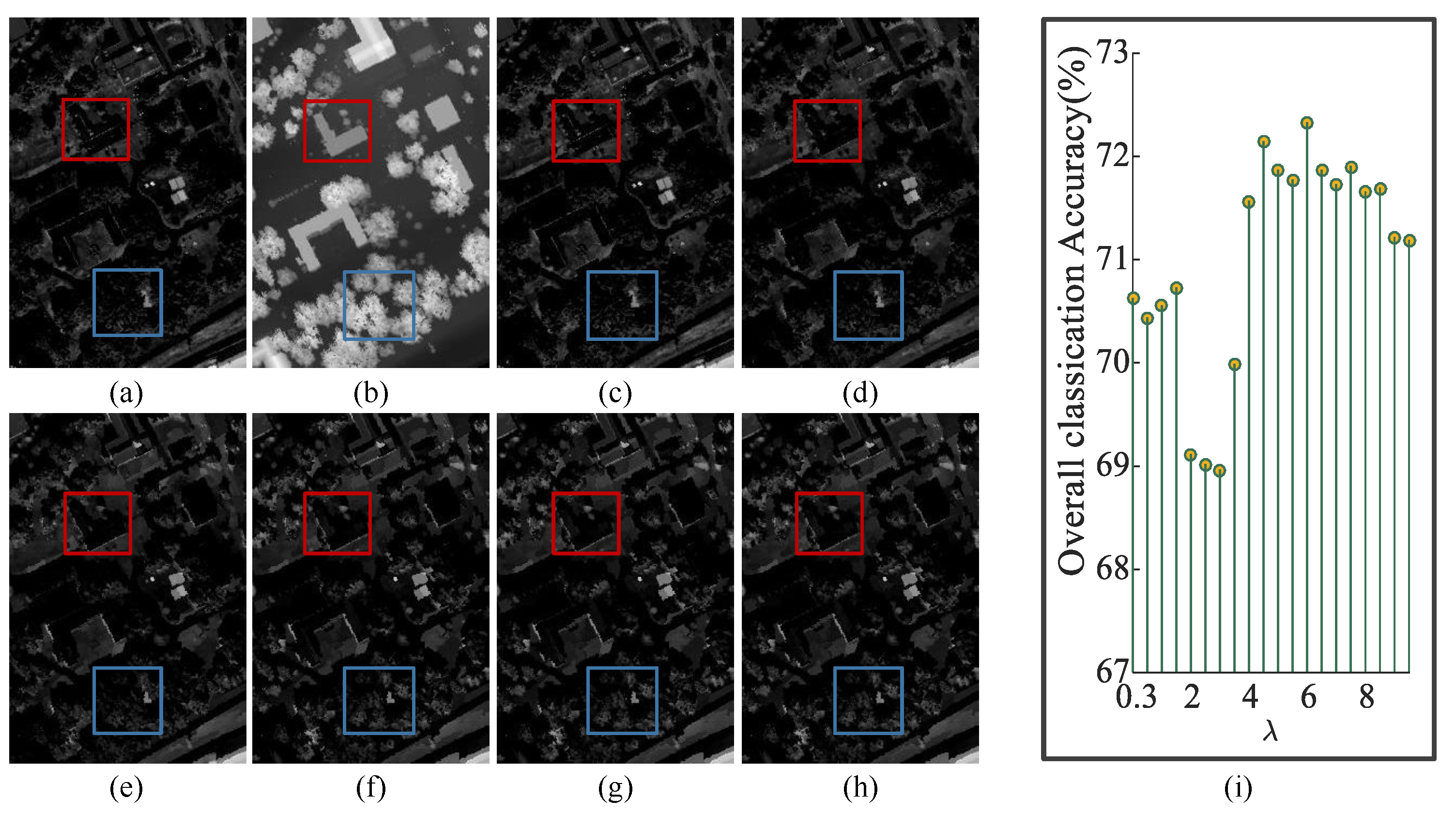
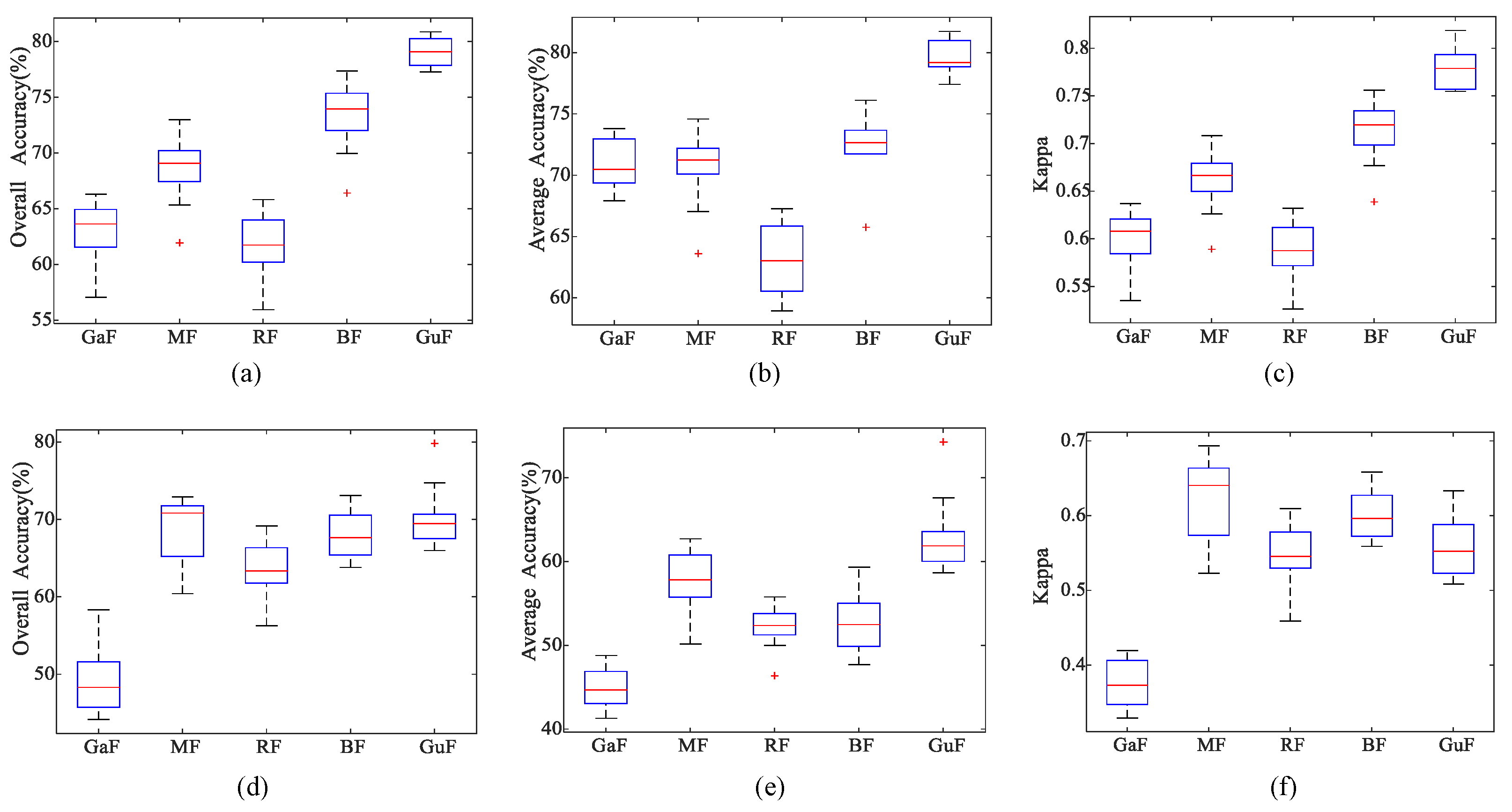
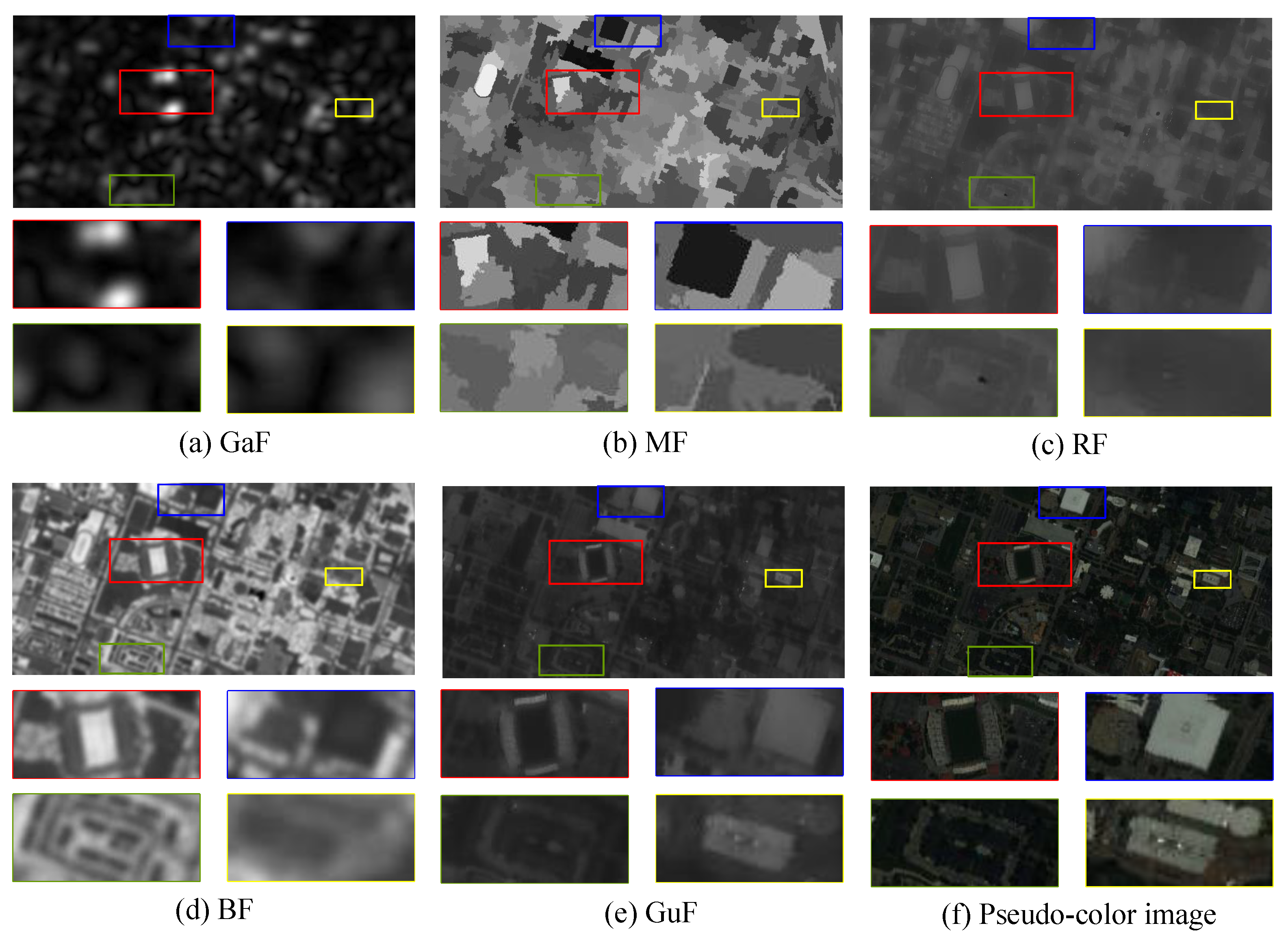
4.5. Effect of Filtering Method
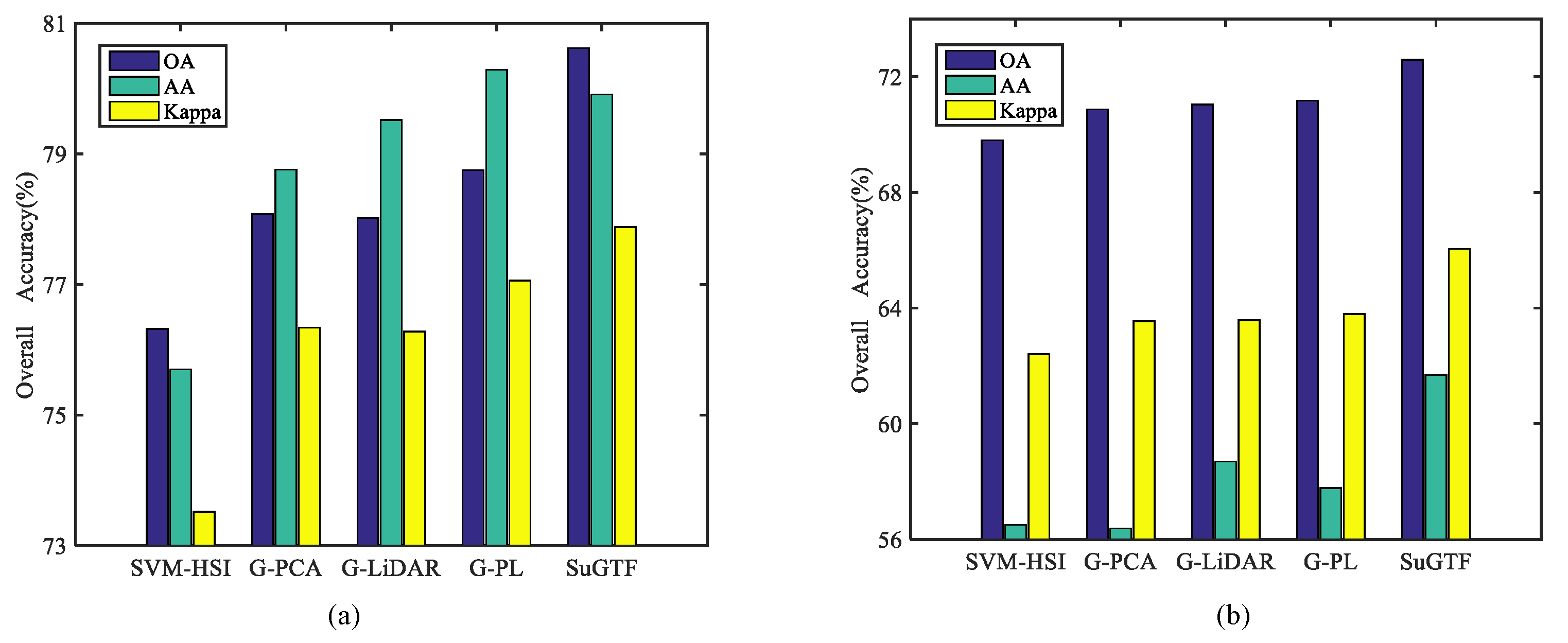
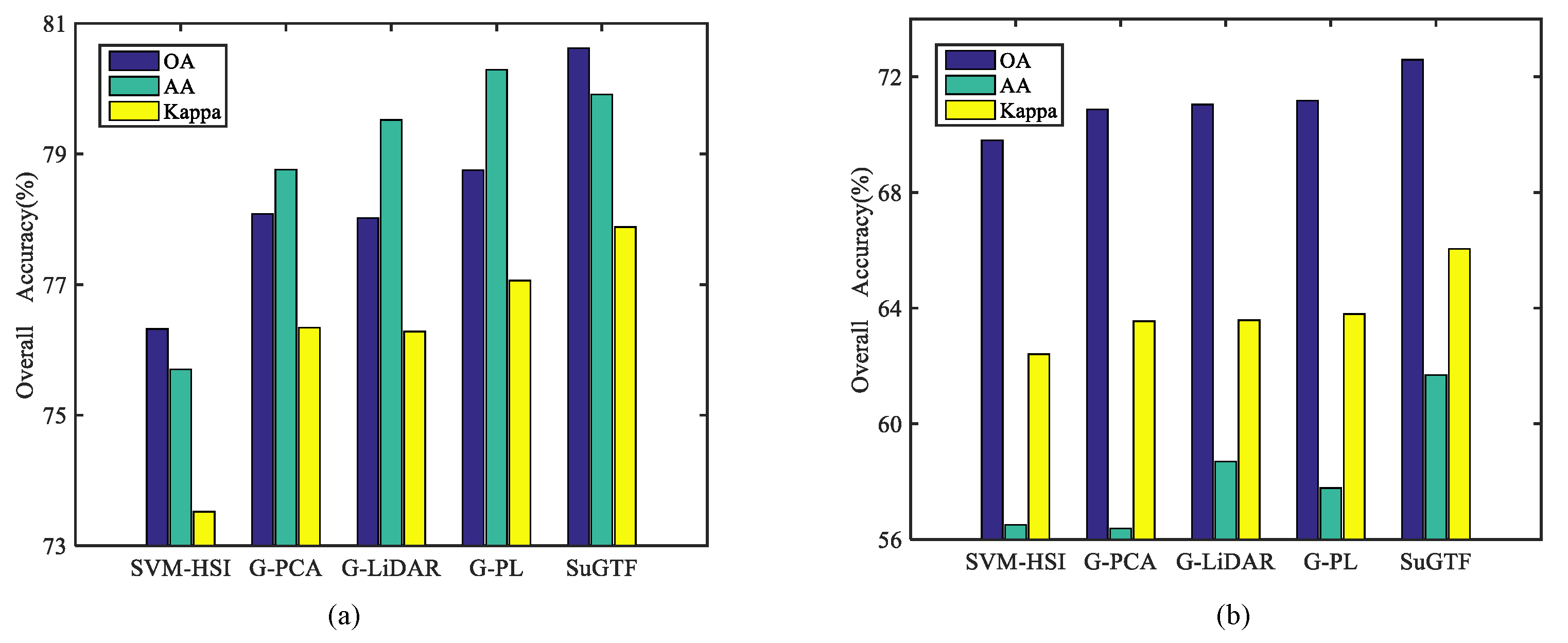
4.6. Effect of Local Features and Global Features
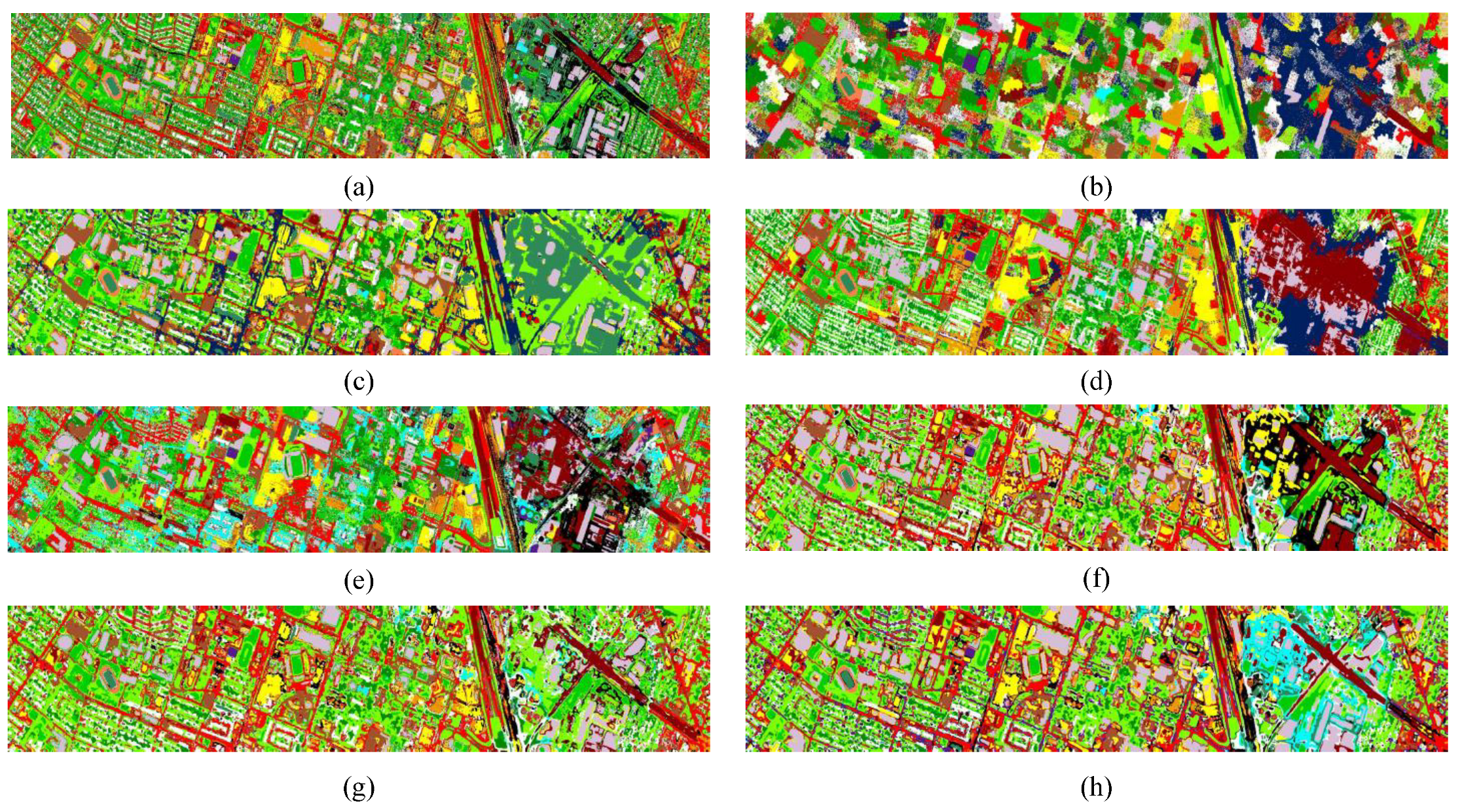
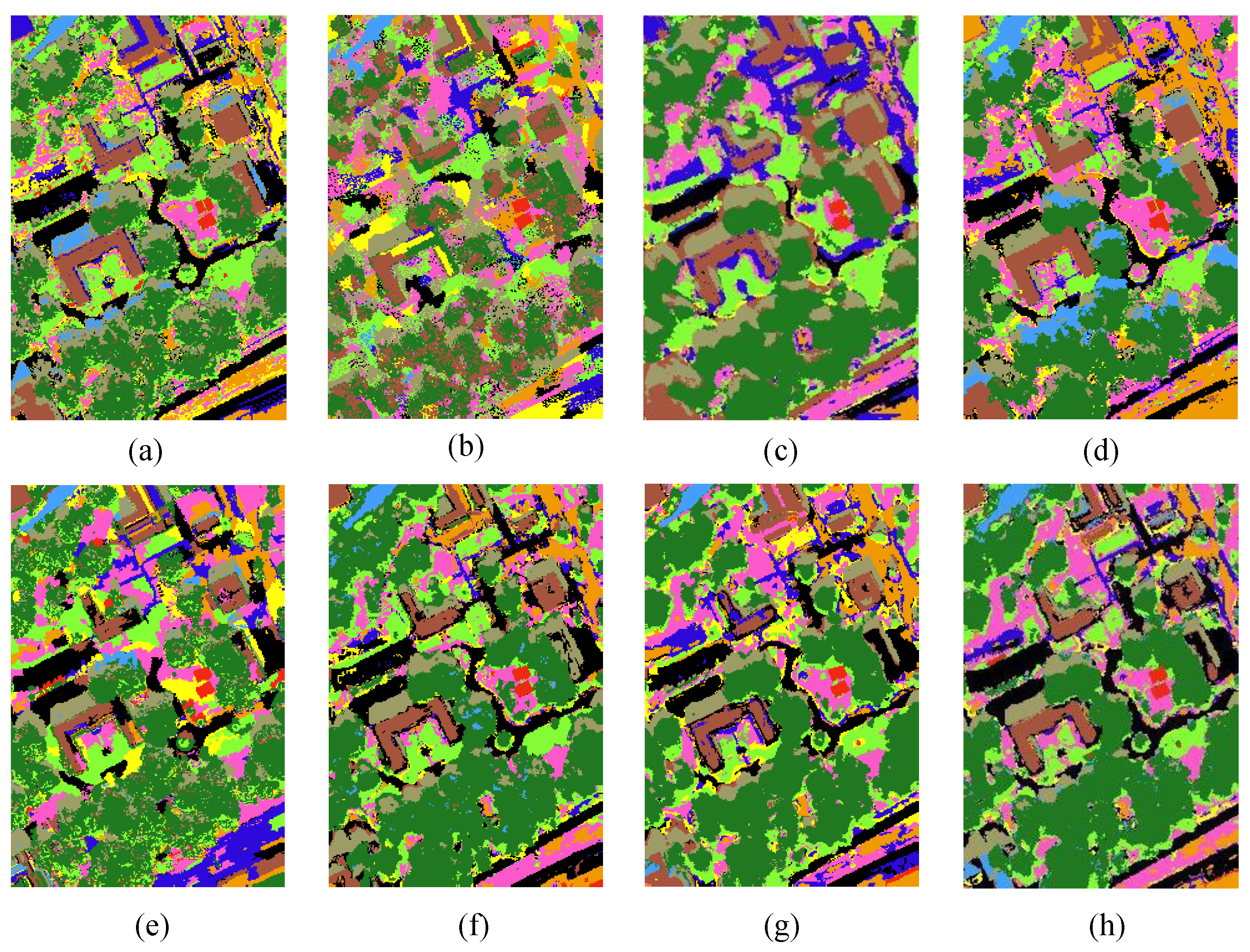
4.7. Comparisons with Other Approaches
- SVM:The SVM classifier is applied to stacked HSI and LiDAR data, i.e., H.
- SuperPCA: The SVM classifier is applied to H.
- CNN: convolutional neural network [51] for HSI and LiDAR data.
- ERS: SVM classifier is applied to H, and ERS guides the first three PCs to use the spatial mean strategy based on Gaussian density.
- NG-OSGT: SVM directly classifies the fusion image obtained by the proposed OSGT method.
- BG-OSGT: Fusion image band grouping cooperation.
- MOSGT: Multi-branch decision fusion of the first three PCs and LiDAR data.
4.8. Computational Complexity
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhou, C.; Tu, B.; Li, N.; He, W.; Plaza, A. Structure-Aware Multikernel Learning for Hyperspectral Image Classification. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 9837–9854. [Google Scholar] [CrossRef]
- AL-Alimi, D.; Al-qaness, M.; Cai, Z.; Dahou, A.; Shao, Y.; Issaka, S. Meta-Learner Hybrid Models to Classify Hyperspectral Images. Remote Sens. 2022, 14, 1038. [Google Scholar] [CrossRef]
- Xi, J.; Ersoy, O.; Fang, J.; Cong, M.; Wu, T.; Zhao, C.; Li, Z. Wide Sliding Window and Subsampling Network for Hyperspectral Image Classification. Remote Sens. 2021, 13, 1290. [Google Scholar] [CrossRef]
- Wu, L.; Gao, Z.; Liu, Y.; Yu, H. Study of uncertainties of hyperspectral image based on Fourier waveform analysis. In Proceedings of the IGARSS 2004, Anchorage, AK, USA, 20–24 September 2004; Volume 5, pp. 3279–3282. [Google Scholar]
- Zhou, C.; Tu, B.; Ren, Q.; Chen, S. Spatial Peak-Aware Collaborative Representation for Hyperspectral Imagery Classification. IEEE Geosci. Remote Sens. Lett. 2022, 19, 1–5. [Google Scholar] [CrossRef]
- Gao, R.; Li, M.; Yang, S.; Cho, K. Reflective Noise Filtering of Large-Scale Point Cloud Using Transformer. Remote Sens. 2022, 14, 577. [Google Scholar] [CrossRef]
- Ojogbane, S.; Mansor, S.; Kalantar, B.; Khuzaimah, Z.; Shafri, H.; Ueda, N. Automated Building Detection from Airborne LiDAR and Very High-Resolution Aerial Imagery with Deep Neural Network. Remote Sens. 2021, 13, 4803. [Google Scholar] [CrossRef]
- Gu, Y.; Wang, Q. Discriminative Graph-Based Fusion of HSI and LiDAR Data for Urban Area Classification. IEEE Geosci. Remote Sens. Lett. 2017, 14, 906–910. [Google Scholar] [CrossRef]
- Debes, C.; Merentitis, A.; Heremans, R.; Hahn, J.; Frangiadakis, N.; Kasteren, T.; Liao, W.; Bellens, R.; Pižurica, A.; Gautama, S. Hyperspectral and LiDAR Data Fusion: Outcome of the 2013 GRSS Data Fusion Contest. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2014, 7, 2405–2418. [Google Scholar] [CrossRef]
- Saunders, C.; Stitson, M.; Weston, J.; Holloway, R.; Bottou, L.; Scholkopf, B.; Smola, A. Support Vector Machine. Comput. Sci. 2002, 1, 1–28. [Google Scholar]
- Chen, Y. Multiple Kernel Feature Line Embedding for Hyperspectral Image Classification. Remote Sens. 2019, 11, 2892. [Google Scholar] [CrossRef] [Green Version]
- Li, J.; Bioucas-Dias, J.; Plaza, A. Spectral–Spatial Hyperspectral Image Segmentation Using Subspace Multinomial Logistic Regression and Markov Random Fields. IEEE Trans. Geosci. Remote Sens. 2012, 50, 809–823. [Google Scholar] [CrossRef]
- Haut, J.; Paoletti, M. Cloud Implementation of Multinomial Logistic Regression for UAV Hyperspectral Images. IEEE J. Miniat. Air Space Syst. 2020, 1, 163–171. [Google Scholar] [CrossRef]
- Zhong, Y.; Zhang, L. An Adaptive Artificial Immune Network for Supervised Classification of Multi-/Hyperspectral Remote Sensing Imagery. IEEE Trans. Geosci. Remote Sens. 2012, 50, 894–909. [Google Scholar] [CrossRef]
- Zhang, X.; Shang, S.; Tang, X.; Feng, J.; Jiao, L. Spectral Partitioning Residual Network with Spatial Attention Mechanism for Hyperspectral Image Classification. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5507714. [Google Scholar] [CrossRef]
- Cui, Y.; Xia, J.; Wang, Z.; Gao, S.; Wang, L. Lightweight Spectral-Spatial Attention Network for Hyperspectral Image Classification. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5510114. [Google Scholar] [CrossRef]
- Meng, Z.; Zhao, F.; Liang, M. SS-MLP: A Novel Spectral-Spatial MLP Architecture for Hyperspectral Image Classification. Remote Sens. 2021, 13, 4060. [Google Scholar] [CrossRef]
- Wang, J.; Huang, R.; Guo, S.; Li, L.; Pei, Z.; Liu, B. HyperLiteNet: Extremely Lightweight Non-Deep Parallel Network for Hyperspectral Image Classification. Remote Sens. 2022, 14, 866. [Google Scholar] [CrossRef]
- Fang, L.; Wang, C.; Li, S.; Benediktsson, J. Hyperspectral Image Classification via Multiple-Feature-Based Adaptive Sparse Representation. IEEE Trans. Instrum. Meas. 2017, 66, 1646–1657. [Google Scholar] [CrossRef]
- Ding, Y.; Guo, Y.; Chong, Y.; Pan, S.; Feng, J. Global Consistent Graph Convolutional Network for Hyperspectral Image Classification. IEEE Trans. Instrum. Meas. 2021, 70, 1–16. [Google Scholar] [CrossRef]
- Zhang, Z.; Liu, D.; Gao, D.; Shi, G. S3Net: Spectral-Spatial-Semantic Network for Hyperspectral Image Classification with the Multiway Attention Mechanism. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–17. [Google Scholar]
- Chen, Y.; Xu, L.; Fang, Y.; Peng, J.; Yang, W.; Wong, A.; Clausi, D. Unsupervised Bayesian Subpixel Mapping of Hyperspectral Imagery Based on Band-Weighted Discrete Spectral Mixture Model and Markov Random Field. IEEE Geosci. Remote Sens. Lett. 2021, 18, 162–166. [Google Scholar] [CrossRef]
- Andrejchenko, V.; Liao, W.; Philips, W.; Scheunders, P. Decision Fusion Framework for Hyperspectral Image Classification Based on Markov and Conditional Random Fields. Remote Sens. 2019, 11, 624. [Google Scholar] [CrossRef] [Green Version]
- Yu, H.; Shang, X.; Song, M.; Hu, J.; Jiao, T.; Guo, Q.; Zhang, B. Union of Class-Dependent Collaborative Representation Based on Maximum Margin Projection for Hyperspectral Imagery Classification. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 553–566. [Google Scholar] [CrossRef]
- Su, H.; Yu, Y.; Du, Q.; Du, P. Ensemble Learning for Hyperspectral Image Classification Using Tangent Collaborative Representation. IEEE Trans. Geosci. Remote Sens. 2020, 58, 3778–3790. [Google Scholar] [CrossRef]
- Zhong, S.; Chang, C.; Zhang, Y. Iterative Edge Preserving Filtering Approach to Hyperspectral Image Classification. IEEE Geosci. Remote Sens. Lett. 2019, 16, 90–94. [Google Scholar] [CrossRef]
- Wei, Y.; Zhou, Y. Spatial-Aware Network for Hyperspectral Image Classification. Remote Sens. 2021, 13, 3232. [Google Scholar] [CrossRef]
- Khodadadzadeh, M.; Li, J.; Prasad, S.; Plaza, A. Fusion of Hyperspectral and LiDAR Remote Sensing Data Using Multiple Feature Learning. IEEE J. Sel. Topics Appl. Earth Observ. Remote Sens. 2015, 8, 2971–2983. [Google Scholar] [CrossRef]
- Wang, P.; Wang, Y.; Zhang, L.; Ni, K. Subpixel Mapping Based on Multisource Remote Sensing Fusion Data for Land-Cover Classes. IEEE Geosci. Remote Sens. Lett. 2022, 19, 1–5. [Google Scholar] [CrossRef]
- Zhao, X.; Tao, R.; Li, W.; Philips, W.; Liao, W. Fractional Gabor Convolutional Network for Multisource Remote Sensing Data Classification. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–18. [Google Scholar] [CrossRef]
- Jahan, F.; Zhou, J.; Awrangjeb, M.; Gao, Y. Inverse Coefficient of Variation Feature and Multilevel Fusion Technique for Hyperspectral and LiDAR Data Classification. IEEE J. Sel. Topics Appl. Earth Observ. Remote Sens. 2020, 13, 367–381. [Google Scholar] [CrossRef] [Green Version]
- Chen, Y.; Li, C.; Ghamisi, P.; Jia, X.; Gu, Y. Deep Fusion of Remote Sensing Data for Accurate Classification. IEEE Geosci. Remote Sens. Lett. 2017, 14, 1253–1257. [Google Scholar] [CrossRef]
- Huang, Q.; Miao, Z.; Zhou, S.; Chang, C.; Li, X. Dense Prediction and Local Fusion of Superpixels: A Framework for Breast Anatomy Segmentation in Ultrasound Image With Scarce Data. IEEE Trans. Instrum. Meas. 2021, 70, 1–8. [Google Scholar] [CrossRef]
- Jia, S.; Zhan, Z.; Zhang, M.; Xu, M.; Huang, Q.; Zhou, J.; Jia, X. Multiple Feature-Based Superpixel-Level Decision Fusion for Hyperspectral and LiDAR Data Classification. IEEE Trans. Geosci. Remote Sens. 2021, 59, 1437–1452. [Google Scholar] [CrossRef]
- Zhao, W.; Jiao, L.; Ma, W.; Zhao, J.; Zhao, J.; Liu, H.; Cao, X.; Yang, S. Superpixel-Based Multiple Local CNN for Panchromatic and Multispectral Image Classification. IEEE Trans. Geosci. Remote Sens. 2017, 55, 4141–4156. [Google Scholar] [CrossRef]
- Jiang, J.; Ma, J.; Chen, C.; Wang, Z.; Cai, Z.; Wang, L. SuperPCA: A Superpixelwise PCA Approach for Unsupervised Feature Extraction of Hyperspectral Imagery. IEEE Trans. Geosci. Remote Sens. 2018, 56, 4581–4593. [Google Scholar] [CrossRef] [Green Version]
- Zhang, X.; Jiang, X.; Jiang, J.; Zhang, Y.; Liu, X.; Cai, Z. Spectral-Spatial and Superpixelwise PCA for Unsupervised Feature Extraction of Hyperspectral Imagery. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–10. [Google Scholar] [CrossRef]
- Liu, M.; Tuzel, O.; Ramalingam, S.; Chellappa, R. Entropy-Rate Clustering: Cluster Analysis via Maximizing a Submodular Function Subject to a Matroid Constraint. IEEE Trans. Pattern Anal. Mach. Intell. 2014, 36, 99–112. [Google Scholar] [CrossRef]
- He, K.; Jian, S.; Tang, X. Guided image filtering. In Proceedings of the 11th European Conference on Computer Vision, Heraklion, Greece, 5–11 September 2010; Springer: Berlin/Heidelberg, Germany, 2010; pp. 1–14. [Google Scholar]
- Wu, L.; Jong, C. A High-Throughput VLSI Architecture for Real-Time Full-HD Gradient Guided Image Filter. IEEE Trans. Circuits Syst. Video Technol. 2019, 29, 1868–1877. [Google Scholar] [CrossRef]
- Yang, Y.; Wan, W.; Huang, S.; Yuan, F.; Yang, S.; Que, Y. Remote Sensing Image Fusion Based on Adaptive IHS and Multiscale Guided Filter. IEEE Access 2016, 4, 4573–4582. [Google Scholar] [CrossRef]
- Fang, J.; Hu, S.; Ma, X. SAR image de-noising via grouping-based PCA and guided filter. IEEE J. Syst. Eng. Electron. 2021, 32, 81–91. [Google Scholar]
- Draper, N. Applied regression analysis. Technometrics 1998, 9, 182–183. [Google Scholar]
- Chan, T.; Esedoglu, S. Aspects of total variation regularized L1 function approximation. SIAM J. Appl. Math. 2005, 65, 1817–1837. [Google Scholar] [CrossRef] [Green Version]
- Gader, P.; Zare, A.; Close, R.; Aitken, J.; Tuell, G. Muufl Gulfport Hyperspectral and Lidar Airborne Data Set; University of Florida: Gainesville, FL, USA, 2013. [Google Scholar]
- Du, X.; Zare, A. Technical Report: Scene Label Ground Truth Map for Muufl Gulfport Data Set; University of Florida: Gainesville, FL, USA, 2017. [Google Scholar]
- Kang, X.; Li, C.; Li, S.; Lin, H. Classification of Hyperspectral Images by Gabor Filtering Based Deep Network. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2018, 11, 1166–1178. [Google Scholar] [CrossRef]
- Karam, C.; Hirakawa, K. Monte-Carlo Acceleration of Bilateral Filter and Non-Local Means. IEEE Trans. Image Process. 2018, 27, 1462–1474. [Google Scholar] [CrossRef] [PubMed]
- Kang, X.; Li, S.; Benediktsson, J. Feature Extraction of Hyperspectral Images with Image Fusion and Recursive Filtering. IEEE Trans. Geosci. Remote Sens. 2014, 52, 3742–3752. [Google Scholar] [CrossRef]
- Chen, Z.; Jiang, J.; Zhou, C.; Fu, S.; Cai, Z. SuperBF: Superpixel-Based Bilateral Filtering Algorithm and Its Application in Feature Extraction of Hyperspectral Images. IEEE Access 2019, 7, 147796–147807. [Google Scholar] [CrossRef]
- Xu, X.; Li, W.; Ran, Q.; Du, Q.; Gao, L.; Zhang, B. Multisource Remote Sensing Data Classification Based on Convolutional Neural Network. IEEE Trans. Geosci. Remote Sens. 2018, 56, 937–949. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Houston | MUUFL Gulfport | ||||||
|---|---|---|---|---|---|---|---|
| Class | Land-Cover Type | Training | Test | Class | Land-Cover Type | Training | Test |
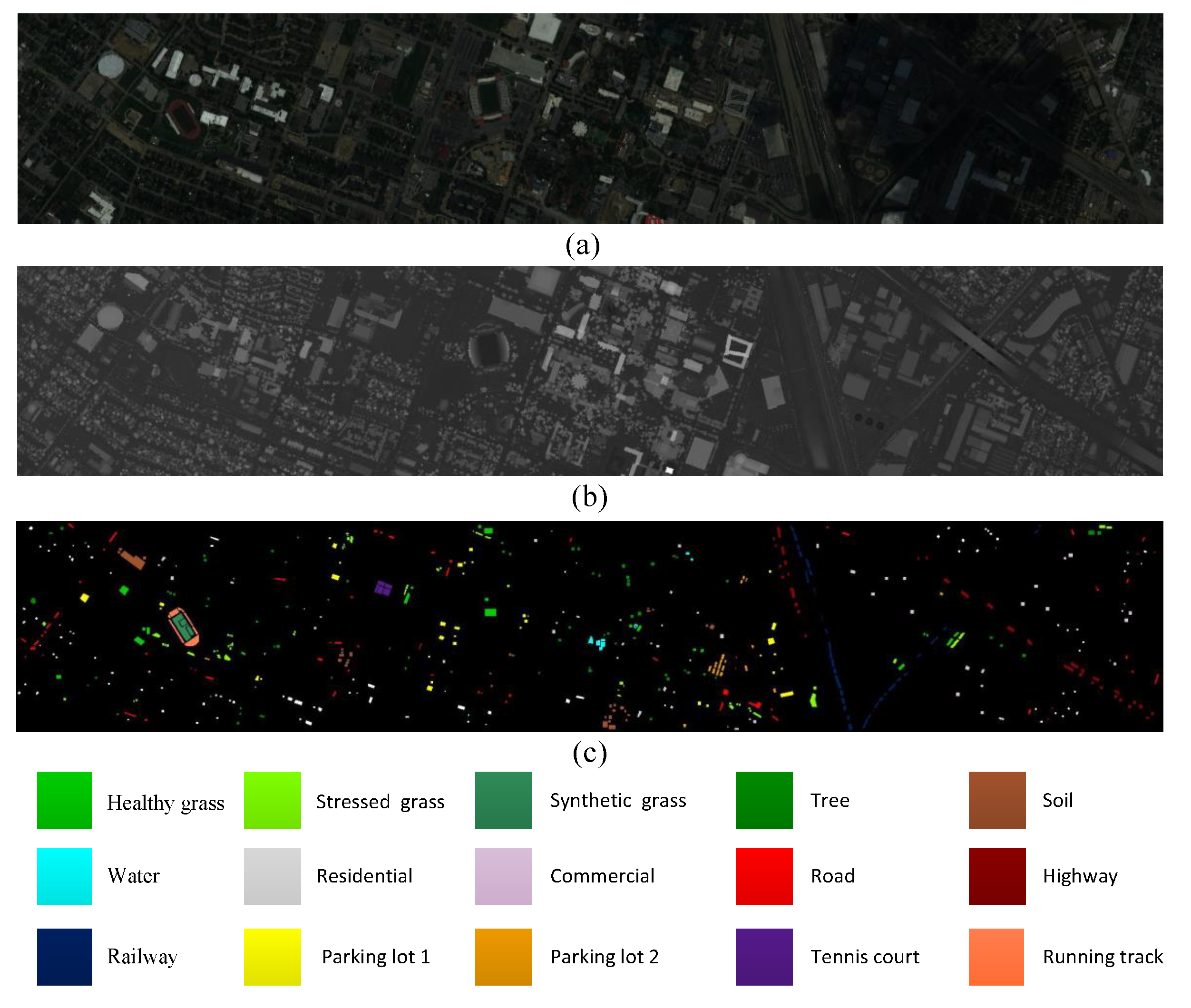
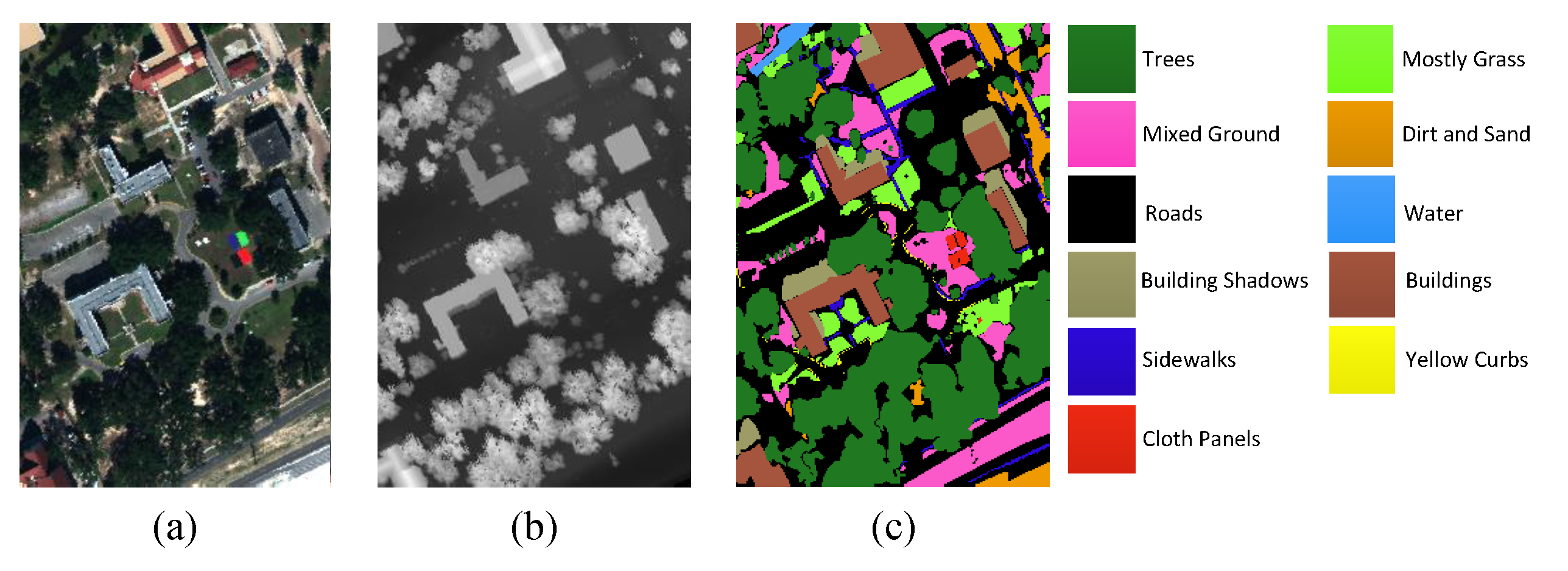
| C1 | Healthy grass | 10 | 1241 | C1 | Trees | 10 | 23,236 |
| C2 | Stressed grass | 10 | 1244 | C2 | Mostly Grass | 10 | 4260 |
| C3 | Synthetic grass | 10 | 687 | C3 | Mixed Ground | 10 | 6872 |
| C4 | Tree | 10 | 1234 | C4 | Dirt and Sand | 10 | 1816 |
| C5 | Soil | 10 | 1232 | C5 | Roads | 10 | 6677 |
| C6 | Water | 10 | 315 | C6 | Water | 10 | 456 |
| C7 | Residential | 10 | 1258 | C7 | Building Shadows | 10 | 2223 |
| C8 | Commercial | 10 | 1234 | C8 | Buildings | 10 | 6230 |
| C9 | Road | 10 | 1242 | C9 | Sidewalks | 10 | 1375 |
| C10 | Highway | 10 | 1217 | C10 | Yellow Curbs | 10 | 173 |
| C11 | Railway | 10 | 1225 | C11 | Cloth Panels | 10 | 259 |
| C12 | Parking lot 1 | 10 | 1223 | ||||
| C13 | Parking lot 2 | 10 | 459 | ||||
| C14 | Tennis court | 10 | 418 | ||||
| C15 | Running track | 10 | 650 | ||||
| Total | 150 | 14,879 | 110 | 53,577 | |||
| Houston Data Set | |||||
|---|---|---|---|---|---|
| metrics | NSL | NSP | PCL-GTF | PL-GTF | OSGT |
| OA(%) | 78.12 | 76.39 | 79.83 | 79.55 | 81.02 |
| AA(%) | 78.5 | 76.66 | 80.66 | 80.25 | 81.09 |
| Kappa | 0.76 | 0.75 | 0.78 | 0.78 | 0.79 |
| MUUFL Gulfport Data Set | |||||
| metrics | NSL | NSP | PCL-GTF | PL-GTF | OSGT |
| OA(%) | 68.68 | 68.85 | 70.82 | 71.12 | 72.59 |
| AA(%) | 52.71 | 56.58 | 56.06 | 56.54 | 68.69 |
| Kappa | 0.61 | 0.61 | 0.63 | 0.64 | 0.68 |
| Class | SVM | SuperPCA | CNN | ERS | NG-OSGT | OSGT | BG-OSGT | MOSGT |
|---|---|---|---|---|---|---|---|---|
| C1 | 93.12 | 54.12 | 79.36 | 77.96 | 72.94 | 93.68 | 90.73 | 90.03 |
| C2 | 82.31 | 47.19 | 93.44 | 50.51 | 68.25 | 87.08 | 87.90 | 90.29 |
| C3 | 68.65 | 98.11 | 99.89 | 94.76 | 80.13 | 89.94 | 83.75 | 87.71 |
| C4 | 82.47 | 31.90 | 48.34 | 45.73 | 75.60 | 92.14 | 97.56 | 94.61 |
| C5 | 92.01 | 77.09 | 81.05 | 78.17 | 69.06 | 90.85 | 90.22 | 86.38 |
| C6 | 94.48 | 83.52 | 62.25 | 50.00 | 58.95 | 82.80 | 90.95 | 72.61 |
| C7 | 67.27 | 36.41 | 77.46 | 78.38 | 69.14 | 78.83 | 78.21 | 76.59 |
| C8 | 78.97 | 33.48 | 52.93 | 70.87 | 58.67 | 82.15 | 88.82 | 79.47 |
| C9 | 83.03 | 37.11 | 61.18 | 76.73 | 70.93 | 76.44 | 73.08 | 79.56 |
| C10 | 63.68 | 62.50 | 39.02 | 63.89 | 54.62 | 70.54 | 83.60 | 81.62 |
| C11 | 59.16 | 76.86 | 54.80 | 60.65 | 62.04 | 70.23 | 76.75 | 80.40 |
| C12 | 57.72 | 50.93 | 83.78 | 70.16 | 60.70 | 76.78 | 88.36 | 84.13 |
| C13 | 40.78 | 58.00 | 0.98 | 59.16 | 47.62 | 55.25 | 70.44 | 71.44 |
| C14 | 69.95 | 100.00 | 90.31 | 90.28 | 85.97 | 79.97 | 97.23 | 82.57 |
| C15 | 98.63 | 81.23 | 88.38 | 98.19 | 76.65 | 98.04 | 98.64 | 98.05 |
| OA | 75.39 | 53.52 | 64.68 | 68.71 | 66.37 | 81.18 | 85.39 | 83.38 |
| AA | 77.38 | 49.09 | 64.81 | 71.34 | 67.42 | 81.59 | 86.40 | 83.36 |
| Kappa | 0.73 | 0.63 | 0.62 | 0.66 | 0.64 | 0.80 | 0.84 | 0.82 |
| Class | SVM | SuperPCA | CNN | ERS | NG-OSGT | OSGT | BG-OSGT | MOSGT |
|---|---|---|---|---|---|---|---|---|
| C1 | 96.94 | 40.34 | 62.37 | 96.72 | 93.38 | 96.95 | 94.35 | 94.54 |
| C2 | 55.16 | 32.55 | 90.21 | 50.36 | 50.03 | 47.30 | 52.87 | 51.27 |
| C3 | 65.42 | 27.83 | 33.79 | 52.93 | 66.27 | 68.71 | 70.02 | 74.71 |
| C4 | 55.02 | 39.94 | 60.24 | 56.03 | 38.13 | 54.84 | 55.39 | 57.93 |
| C5 | 87.24 | 28.55 | 60.15 | 69.90 | 68.47 | 77.63 | 73.12 | 78.49 |
| C6 | 53.70 | 86.14 | 4.41 | 32.13 | 28.41 | 40.33 | 53.72 | 38.31 |
| C7 | 39.01 | 77.22 | 78.69 | 52.82 | 41.46 | 51.29 | 47.48 | 56.20 |
| C8 | 83.14 | 40.83 | 59.55 | 96.04 | 60.70 | 83.36 | 88.64 | 90.41 |
| C9 | 30.91 | 36.67 | 23.48 | 34.28 | 12.83 | 25.64 | 41.19 | 44.60 |
| C10 | 13.04 | 32.20 | 4.34 | 1.36 | 1.30 | 6.85 | 9.96 | 8.73 |
| C11 | 54.31 | 85.56 | 58.19 | 99.58 | 32.46 | 56.21 | 86.54 | 83.57 |
| OA | 70.59 | 38.71 | 59.22 | 70.99 | 59.48 | 72.67 | 74.57 | 75.63 |
| AA | 57.62 | 27.45 | 48.67 | 58.37 | 44.86 | 64.67 | 61.21 | 61.71 |
| Kappa | 0.64 | 0.48 | 0.50 | 0.64 | 0.5 | 0.56 | 0.67 | 0.69 |
| Data Set | Different Components | Different Guide Images | |||
|---|---|---|---|---|---|
| ERS | OSGT | GF | G-PCA | G-LiDAR | |
| Houston | 8.69 | 0.19 | 33.47 | 32.94 | 32.76 |
| MUUFL Gulfport | 0.60 | 0.09 | 0.94 | 0.95 | 0.93 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tu, B.; Zhu, Y.; Zhou, C.; Chen, S.; Plaza, A. Optimized Spatial Gradient Transfer for Hyperspectral-LiDAR Data Classification. Remote Sens. 2022, 14, 1814. https://doi.org/10.3390/rs14081814
Tu B, Zhu Y, Zhou C, Chen S, Plaza A. Optimized Spatial Gradient Transfer for Hyperspectral-LiDAR Data Classification. Remote Sensing. 2022; 14(8):1814. https://doi.org/10.3390/rs14081814
Chicago/Turabian StyleTu, Bing, Yu Zhu, Chengle Zhou, Siyuan Chen, and Antonio Plaza. 2022. "Optimized Spatial Gradient Transfer for Hyperspectral-LiDAR Data Classification" Remote Sensing 14, no. 8: 1814. https://doi.org/10.3390/rs14081814
APA StyleTu, B., Zhu, Y., Zhou, C., Chen, S., & Plaza, A. (2022). Optimized Spatial Gradient Transfer for Hyperspectral-LiDAR Data Classification. Remote Sensing, 14(8), 1814. https://doi.org/10.3390/rs14081814