
Study on Significance Enhancement Algorithm of Abnormal Features of Urban Road Ground Penetrating Radar Images


Abstract
:
1. Introduction
2. Algorithm Model and Analysis of Radar Image Attention Mechanism
2.1. GPR Noise Characteristics and Preprocessing
2.2. Construction of Visual Attention Features
3. Practical Testing of the Algorithm
3.1. GPR Image Preprocessing
3.2. Extracting Visual Attention Features from Abnormal Regions
3.3. Experimental Results
4. Discussion
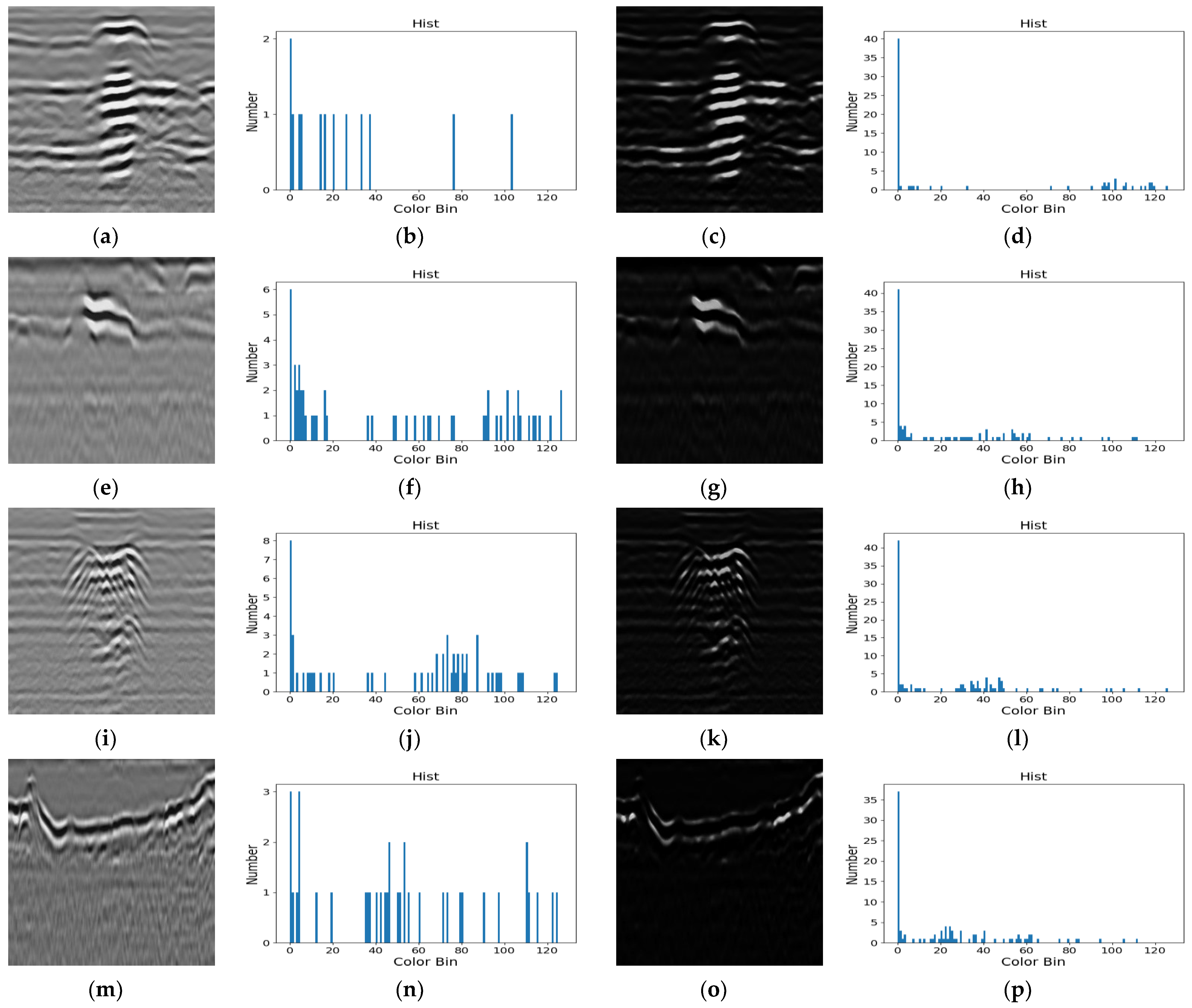
- Based on PSNR and SSIM as image preprocessing evaluation standards in this experiment: Noises removal is achieved by wavelet decomposition. When the weight of vertical feature enhancement and horizontal standing wave noise removal are both 0.5, the PSNR value of 26.72 is relatively high while the SSIM of 87.23 is retained, which has an obvious effect on noise removal visually. Especially for the high-frequency isolated noise points at the bottom, the removal effect is obvious. The denoised image combined with Gamma transform can effectively suppress the background information and highlight the relevant features of abnormal regions.
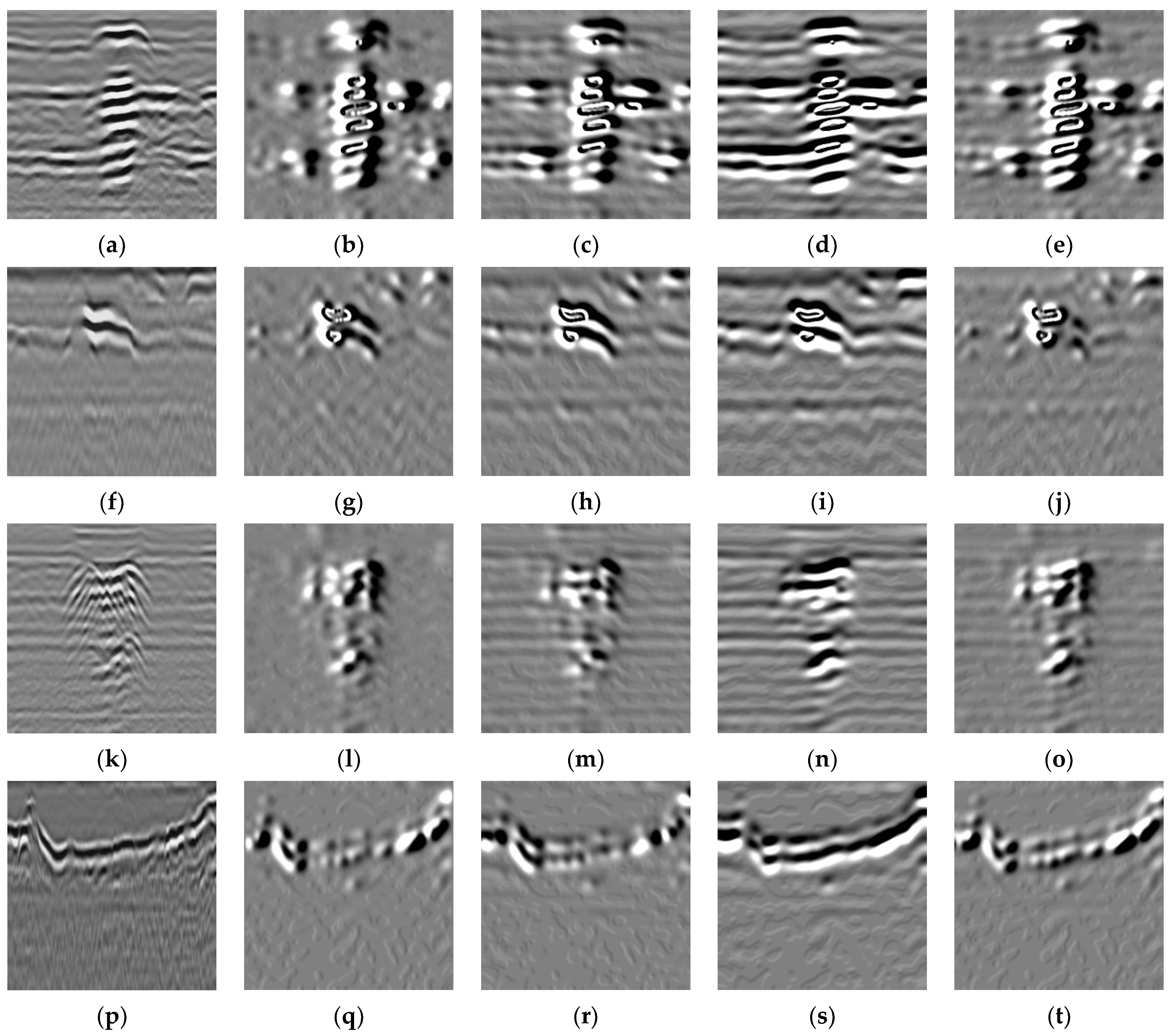
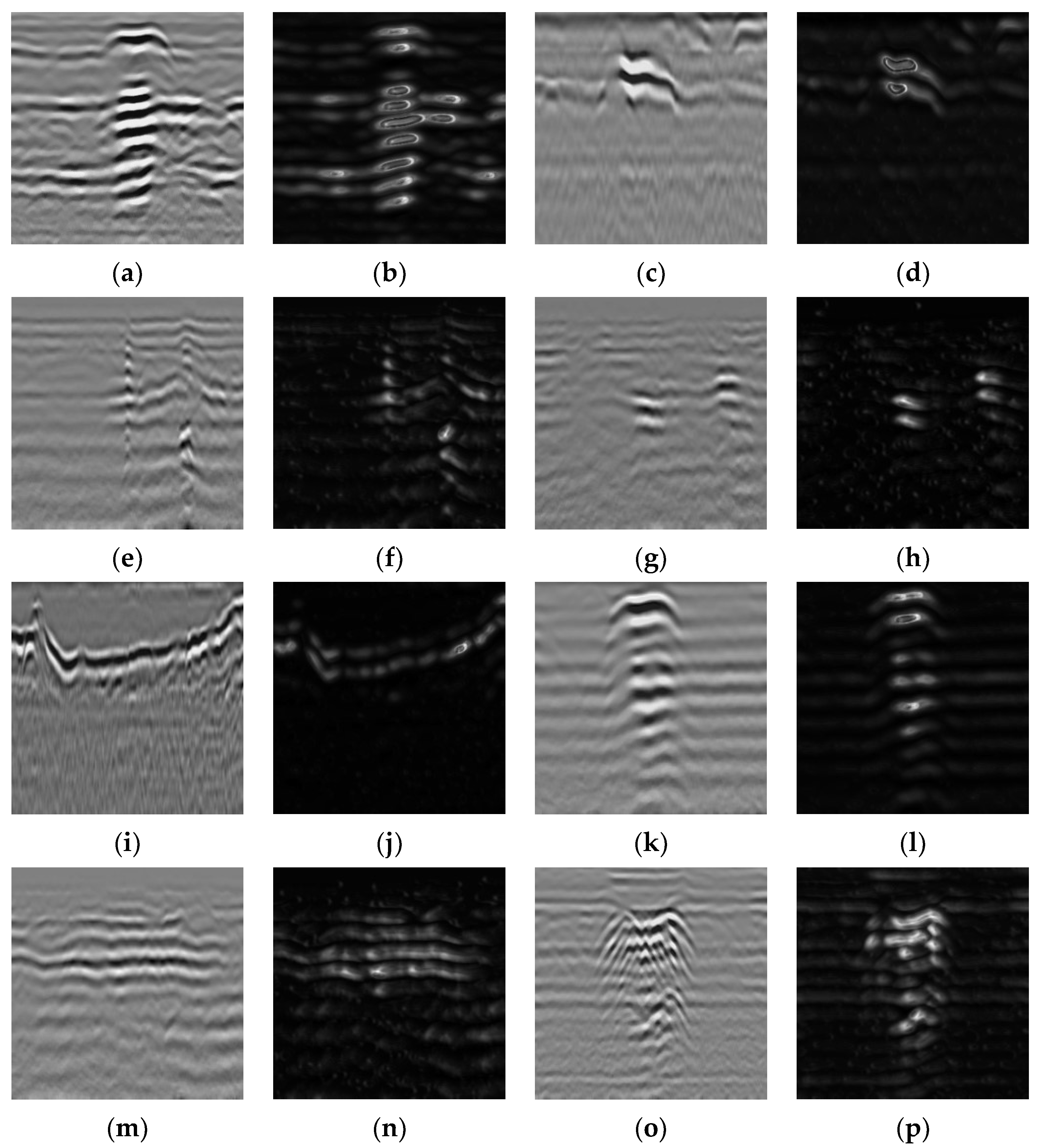
- In the second part of the algorithm, the construction of the brightness and directional feature pyramid provides the elements for the visual attention mechanism. The experiment uses higher layer pyramid features, which better avoid the influence of some image edges. The center-surround strategy can well simulate the response of human vision to significant regions. It avoids the influence of noises caused by the distribution of complex underground media and the hardware defects of GPR and ignores the edge details with strong interference.
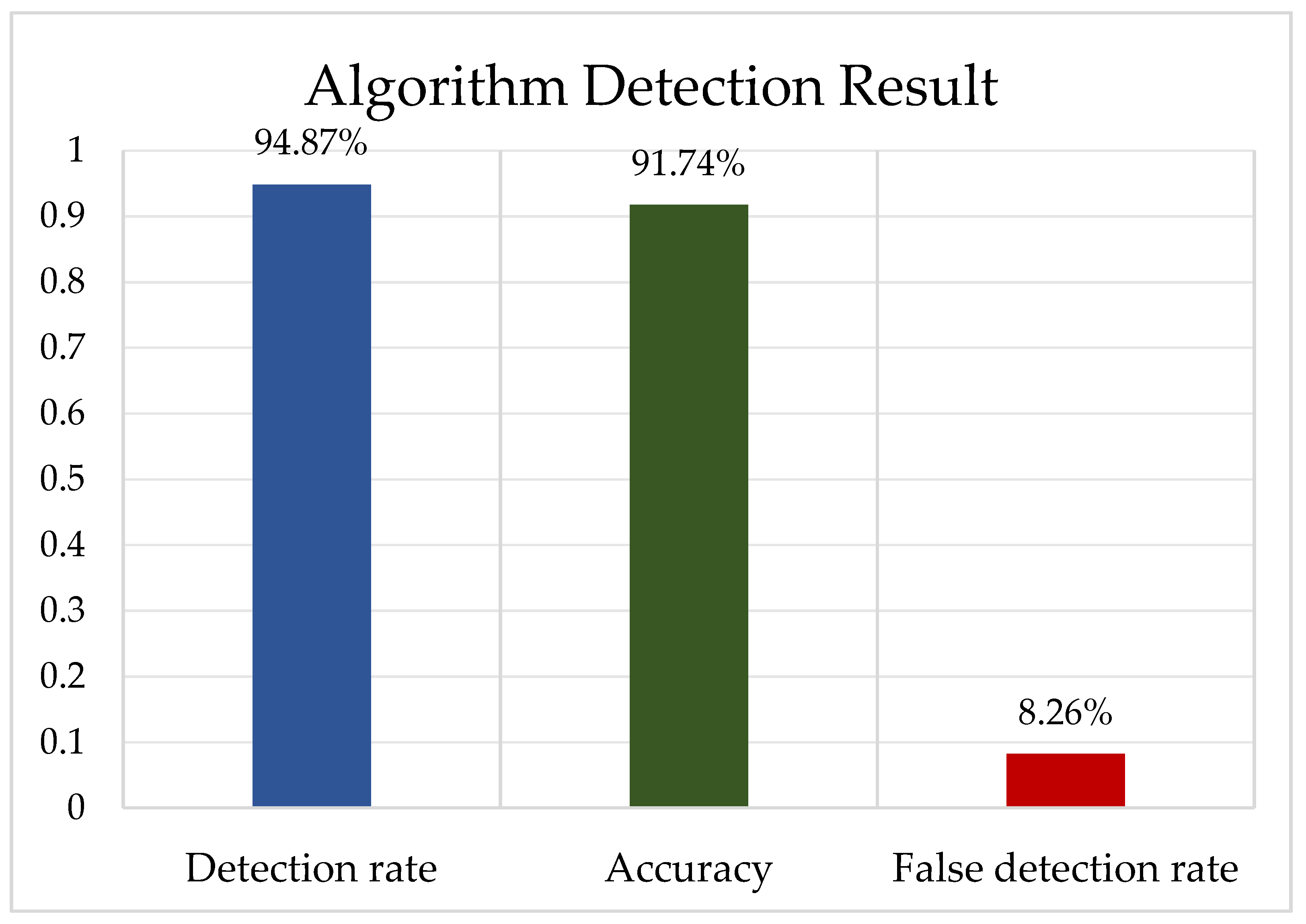
- In Figure 12, the detection rate is 94.87%, which means this algorithm can find out most of the abnormal regions and features under the detection road. Since the algorithm detected underground problems based on brightness and directional features. The more serious the problems, the stronger the brightness and the more complex the reflection in the GPR images. So the undetected problems may not be very harmful. The detection accuracy is 91.74% and the false detection rate is 8.26%. Some normal stratum boundaries and strong horizontal standing wave interference will lead to false detections. Among all the detected regions, the number of correct abnormal regions can fully meet the requirements of large-scale screening of GPR images. In the later manual processing, the detected regions can be quickly screened. This can avoid the inefficiency of manual search for problems from redundant GPR data. In general, in this experiment, the algorithm can meet the needs of GPR underground abnormal regions detection.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Benedetto, A.; Tosti, F.; Ciampoli, L.B.; D’Amico, F. An overview of ground-penetrating radar signal processing techniques for road inspections. Signal Process. 2017, 132, 201–209. [Google Scholar] [CrossRef]
- Nectaria, D.; Peter, A.A.; Steven, R.J.; Dylan, K. A GPR-Based Pavement Density Profiler: Operating Principles and Applications. Remote Sens. 2021, 13, 2613. [Google Scholar]
- Lai, W.W.; Derobert, X.; Peter, A. A review of ground penetrating radar application in civil engineering: A 30-year journey from locating and testing to imaging and diagnosis. NDT E Int. 2018, 96, 58–79. [Google Scholar]
- Yang, J.; Yunling, D. 2D Wavelet Decomposition and F-K Migration for Identifying Fractured Rock Areas Using Ground Penetrating Radar. Remote Sens. 2021, 13, 2280. [Google Scholar]
- Paola, M.B.M.; José, T.A.J.; Genda, C.; Neil, L.A.; dos Santos, A.B. Ground penetrating radar for assessment of reinforced concrete wastewater treatment plant. J. Civ. Struct. Health Monit. 2020, 11, 1–14. [Google Scholar]
- Klewe, T.; Strangfeld, C.; Kruschwitz, S. Review of moisture measurements in civil engineering with ground penetrating radar—Applied methods and signal features. Constr. Build. Mater. 2021, 278, 122250. [Google Scholar] [CrossRef]
- Zhang, X.; Feng, X.; Zhang, Z.; Kang, Z.; Chai, Y.; You, Q.; Ding, L. Dip Filter and Random Noise Suppression for GPR B-Scan Data Based on a Hybrid Method in f-x Domain. Remote Sens. 2019, 11, 2180. [Google Scholar] [CrossRef] [Green Version]
- Kang, M.S.; Kim, N.; Im, S.B.; Lee, J.J.; An, Y.K. 3D GPR Image-based UcNet for Enhancing Underground Cavity Detectability. Remote Sens. 2019, 11, 2545. [Google Scholar] [CrossRef] [Green Version]
- Solla, M.; Lagüela, S.; González-Jorge, H.; Arias, P. Approach to identify cracking in asphalt pavement using GPR and infrared thermographic methods: Preliminary findings. NDT E Int. 2014, 62, 55–65. [Google Scholar] [CrossRef]
- Meecan, B.; Io, B.; Bucak, H.M. Feature vector for underground object detection using B-scan images from GprMax. Microprocess. Microsyst. 2020, 76, 103116. [Google Scholar] [CrossRef]
- Du, Y.; Du, Z.; Liu, C. Road Diseases Recongition of Ground Penetrating Radar Based on Extreme Gradient Boosting. J. Tongji Univ. Nat. Sci. 2020, 48, 1742–1750. [Google Scholar]
- Li, S.; Gu, X.; Xu, X.; Xu, D.; Dong, Q. Detection of concealed cracks from ground penetrating radar images based on deep learning algorithm. Constr. Build. Mater. 2021, 273, 121949. [Google Scholar] [CrossRef]
- Li, H.; Li, N.; Wang, H.; Gui, Z.; Song, D. An Algorithm of Subsurface Defect Detection for Airport Runway Based on GPR. IEEE Robot. Autom. Lett. 2021, 6, 3001–3008. [Google Scholar] [CrossRef]
- Liu, Z.; Wu, W.; Gu, X.; Li, S.; Wang, L.; Zhang, T. Application of Combining YOLO Models and 3D GPR Images in Road Detection and Maintenance. Remote Sens. 2021, 13, 1081. [Google Scholar] [CrossRef]
- Treisman, A.M.; Gelade, G. A feature-integration theory of attention. Cogn. Psychol. 1980, 12, 97–136. [Google Scholar] [CrossRef]
- Lee, D.; Choi, M.; Lee, J. Prediction of Head Movement in 360-Degree Videos Using Attention Model. Sensors 2021, 21, 3678. [Google Scholar] [CrossRef] [PubMed]
- Feng, D.; Liu, S.; Wang, X.; Yang, J.; Wang, X. The Noise Attenuation and Stochastic Clutter Removal of Ground Penetrating Radar Based on the K-SVD Dictionary Learning. IEEE Access 2021, 9, 74879–74890. [Google Scholar] [CrossRef]
- Liu, Z.; Wu, Y.; Liu, B.; Liu, M.; Lan, R.; Sun, H. Research on the interference elimination method of GPR signal for tunnel geological prediction. Chin. J. Eng. 2020, 42, 390–398. [Google Scholar]
- Bilgili, F. Business cycle co-movements between renewables consumption and industrial production: A continuous wavelet coherence approach. Renew. Sustain. Energy Rev. 2015, 52, 325–332. [Google Scholar] [CrossRef]
- Bilgili, F.; Lorente, D.B.; Kukaya, S.; Nlü, F.; Rosha, P. The role of hydropower energy in the level of CO2 emissions: An application of continuous wavelet transform. Renew. Energy 2021, 178, 283–294. [Google Scholar] [CrossRef]
- Huang, S.C.; Cheng, F.C.; Chiu, Y.S. Efficient Contrast Enhancement Using Adaptive Gamma Correction with Weighting Distribution. IEEE Trans. Image Process. A Publ. IEEE Signal Process. Soc. 2013, 22, 1032–1041. [Google Scholar] [CrossRef] [PubMed]
- Ak, A.; Rkj, A.; Nkn, B. An improved Gamma correction model for image dehazing in a multi-exposure fusion framework. J. Vis. Commun. Image Represent. 2021, 78, 103122. [Google Scholar]
- Xu, Z.; Yang, J.; Zhang, W.; Yang, Z. Regions of Interest Detection Algorithm Based on Improved Visual Attention Model. Appl. Mech. Mater. 2014, 513, 3368–3371. [Google Scholar] [CrossRef]
- Tang, J.; Li, M.; Li, Z. Tag ranking based on salient region graph propagation. Multimed. Syst. 2015, 21, 267–275. [Google Scholar] [CrossRef]
- Corbetta, M.; Shulman, G.L. Control of goal-directed and stimulus-driven attention in the brain. Nat. Rev. Neurosci. 2002, 3, 201. [Google Scholar] [CrossRef]
- Dacey, D.; Packer, O.S.; Diller, L.; Brainard, D.; Lee, B. Center surround receptive field structure of cone bipolar cells in primate retina. Vis. Res. 2000, 40, 1801–1811. [Google Scholar] [CrossRef] [Green Version]
- Zhao, M.; Qiu, W.; Wen, T.; Liao, T.; Huang, J. Feature extraction based on Gabor filter and Support Vector Machine classifier in defect analysis of Thermoelectric Cooler Component. Comput. Electr. Eng. 2021, 92, 107118. [Google Scholar] [CrossRef]
- Ananyev, E.; Yong, Z.; Hsieh, P. Center-surround velocity-based segmentation: Speed, eccentricity, and timing of visual stimuli interact to determine interocular dominance. J. Vis. 2019, 19, 3. [Google Scholar] [CrossRef]
- Liu, C.; Tan, Z.; Yang, J.; Zhang, C.; Xu, H.; Okasha, A.; Arbab, A.M.H. Ultrasonic diagnosis of functional dyspepsia under adaptive partial differential denoising model and its relationship with Helicobacter pylori infection. Results Phys. 2021, 26, 104387. [Google Scholar] [CrossRef]
- Harshalatha, Y.; Biswas, P.K. Structural similarity-based rate control algorithm for 3D video. Multimed. Tools Appl. 2021, 80, 25897–25908. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Abnormal Type | Typical Image | Image Features | Abnormal Type | Typical Image | Image Features |
|---|---|---|---|---|---|
| Looseness |  | From top to bottom in the image, the reflected signal energy changes obviously, and the overall amplitude is strong. | Cavity | 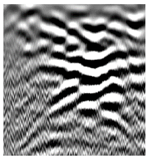 | Diffraction waves and multiple waves are clearly developed. The reflected signal energy is stronger than the normal region. And the amplitude, phase of this region changes are visibly. |
| Water-rich |  | In the image, the reflected energy of the top surface is strong, the signal is attenuated. This part of the region is brighter than the surrounding region. | Stratum subsidence | 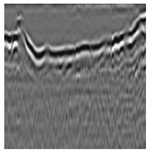 | The subsidence signal is very different from the surrounding region. And the boundaries of this region are clear. Most importantly, the shape has an extension in a certain direction. |
| Pipeline |  | Most of the images show regular hyperbolic features. It can find the diffraction phenomenon in the GPR image. The reflected signal of this region changes dramatically | Pipe drain |  | The hyperbolic diffraction phenomenon is easily observed. And there is a horizontal extension at the top. The frequency of this region is higher than the background field. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, F.; Yang, F.; Yan, R.; Qiao, X.; Xing, H.; Li, Y. Study on Significance Enhancement Algorithm of Abnormal Features of Urban Road Ground Penetrating Radar Images. Remote Sens. 2022, 14, 1546. https://doi.org/10.3390/rs14071546
Li F, Yang F, Yan R, Qiao X, Xing H, Li Y. Study on Significance Enhancement Algorithm of Abnormal Features of Urban Road Ground Penetrating Radar Images. Remote Sensing. 2022; 14(7):1546. https://doi.org/10.3390/rs14071546
Chicago/Turabian StyleLi, Fanruo, Feng Yang, Rui Yan, Xu Qiao, Hongjia Xing, and Yijin Li. 2022. "Study on Significance Enhancement Algorithm of Abnormal Features of Urban Road Ground Penetrating Radar Images" Remote Sensing 14, no. 7: 1546. https://doi.org/10.3390/rs14071546
APA StyleLi, F., Yang, F., Yan, R., Qiao, X., Xing, H., & Li, Y. (2022). Study on Significance Enhancement Algorithm of Abnormal Features of Urban Road Ground Penetrating Radar Images. Remote Sensing, 14(7), 1546. https://doi.org/10.3390/rs14071546