
IMU-Aided Registration of MLS Point Clouds Using Inertial Trajectory Error Model and Least Squares Optimization

 ,
,  , ,
, ,
Abstract
:1. Introduction
2. Related Work
3. Methods
3.1. Short Time Period Inertial Trajectory Error Model
3.1.1. Analysis of the Inertial Trajectory Error
3.1.2. Inertial Trajectory Error Model over a Short Time Period
3.2. Parameter Estimation of the Inertial Trajectory Error Model
3.3. MLS Registration Algorithm Based on the Inertial Trajectory Error Model
4. Results
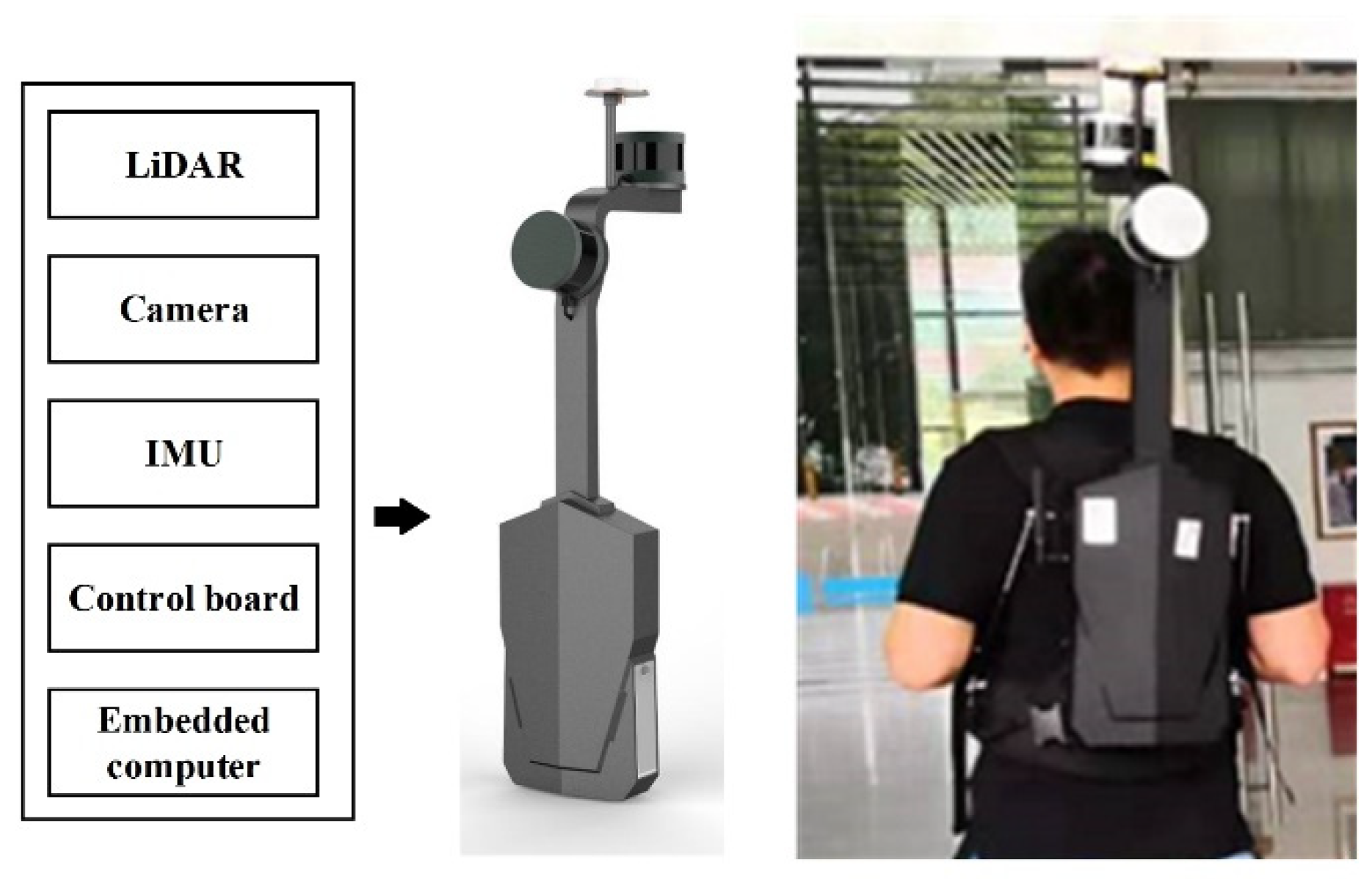
4.1. Equipment and Experimental Data
4.2. Experimental Results
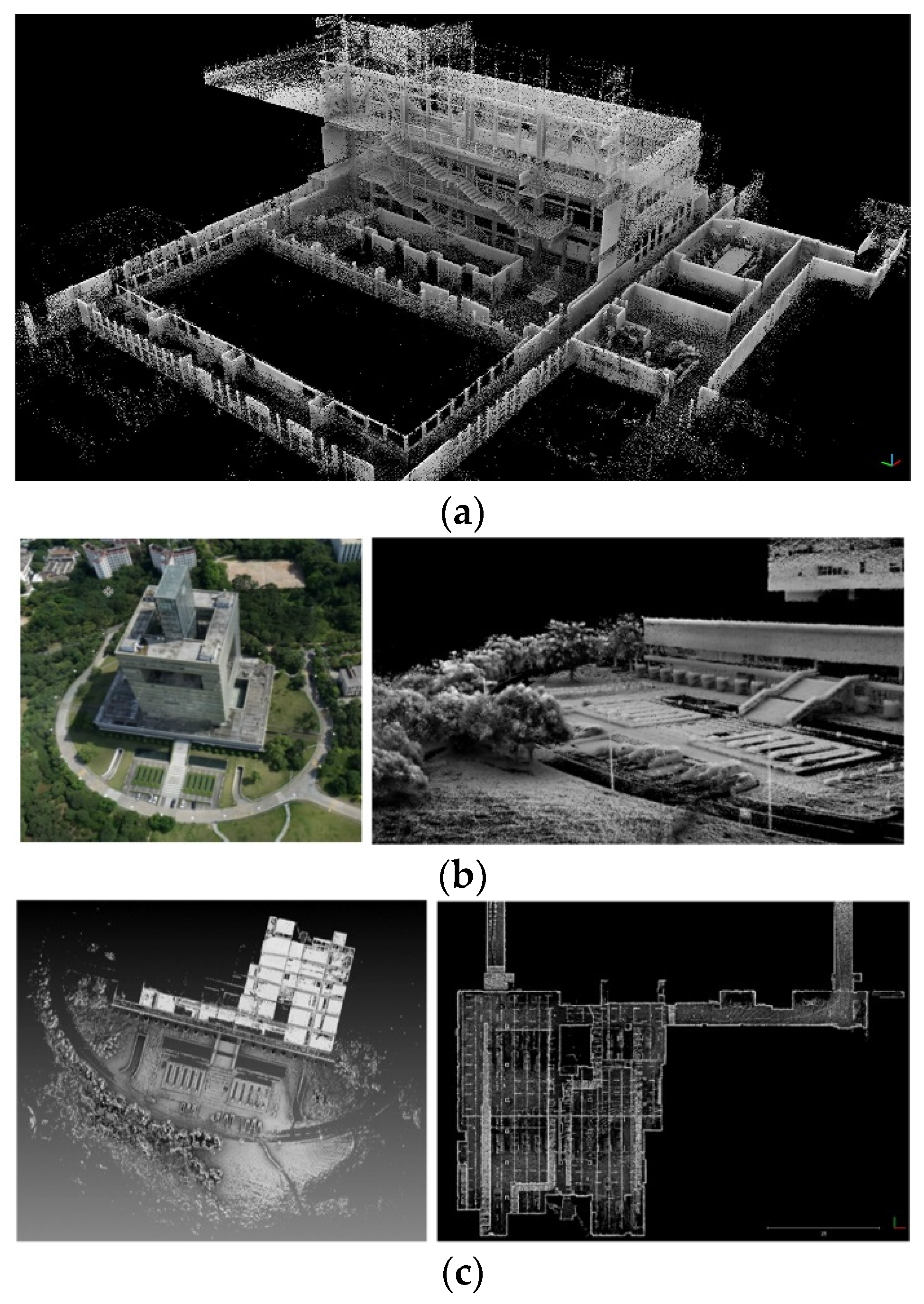
4.2.1. Indoor-Outdoor Mapping Application
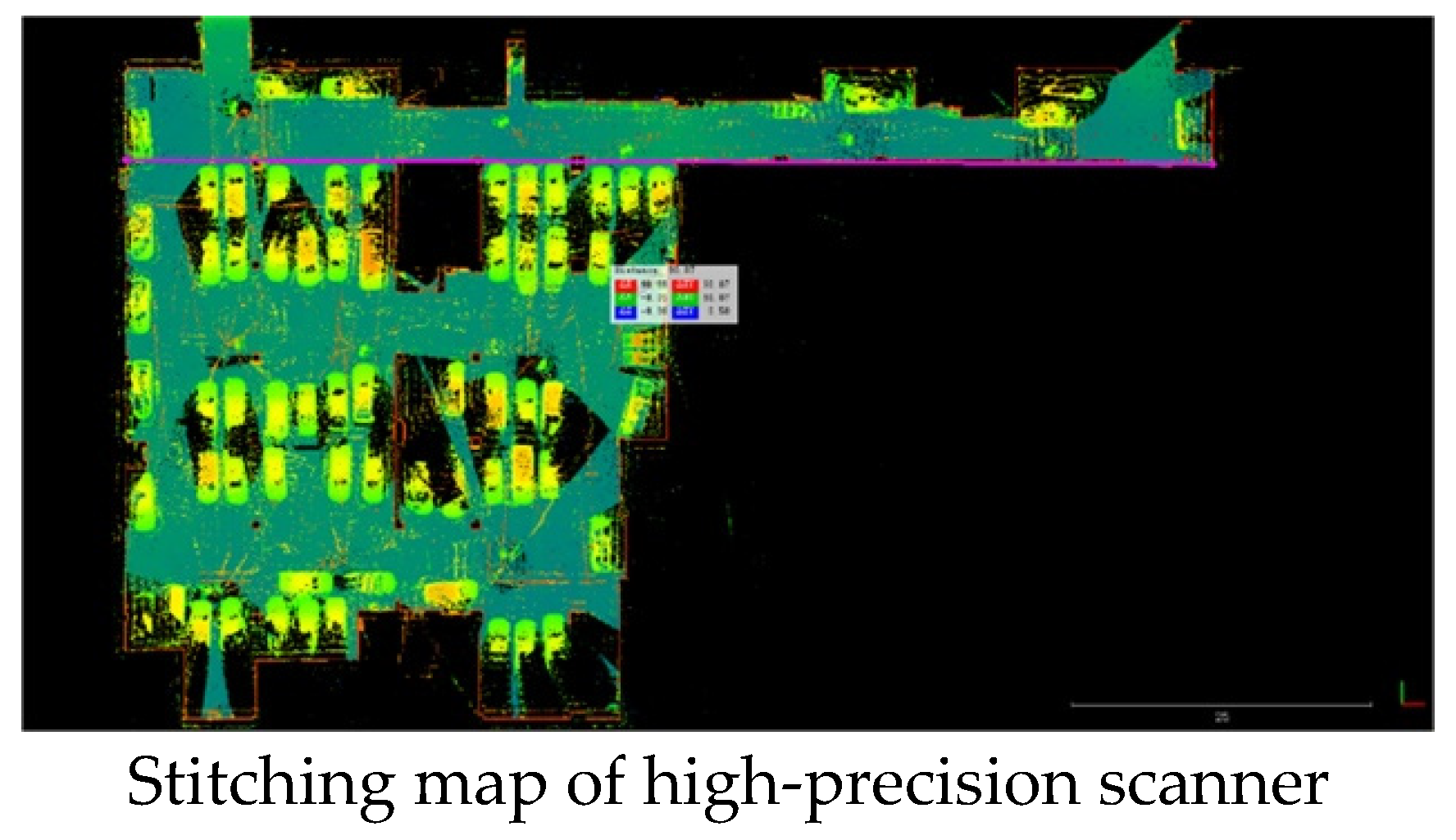
4.2.2. Mapping Accuracy
4.2.3. Registration Algorithm Parameter Settings
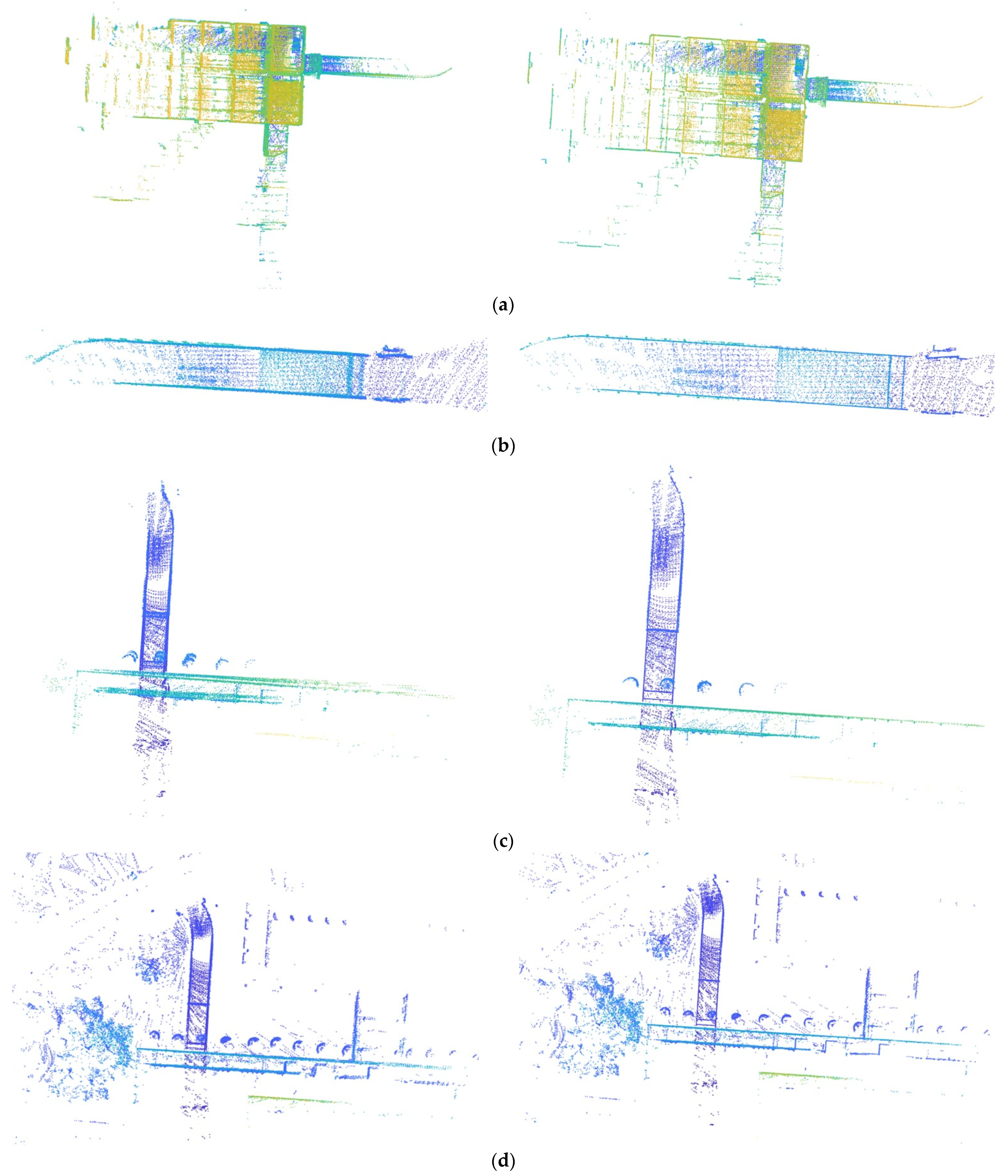
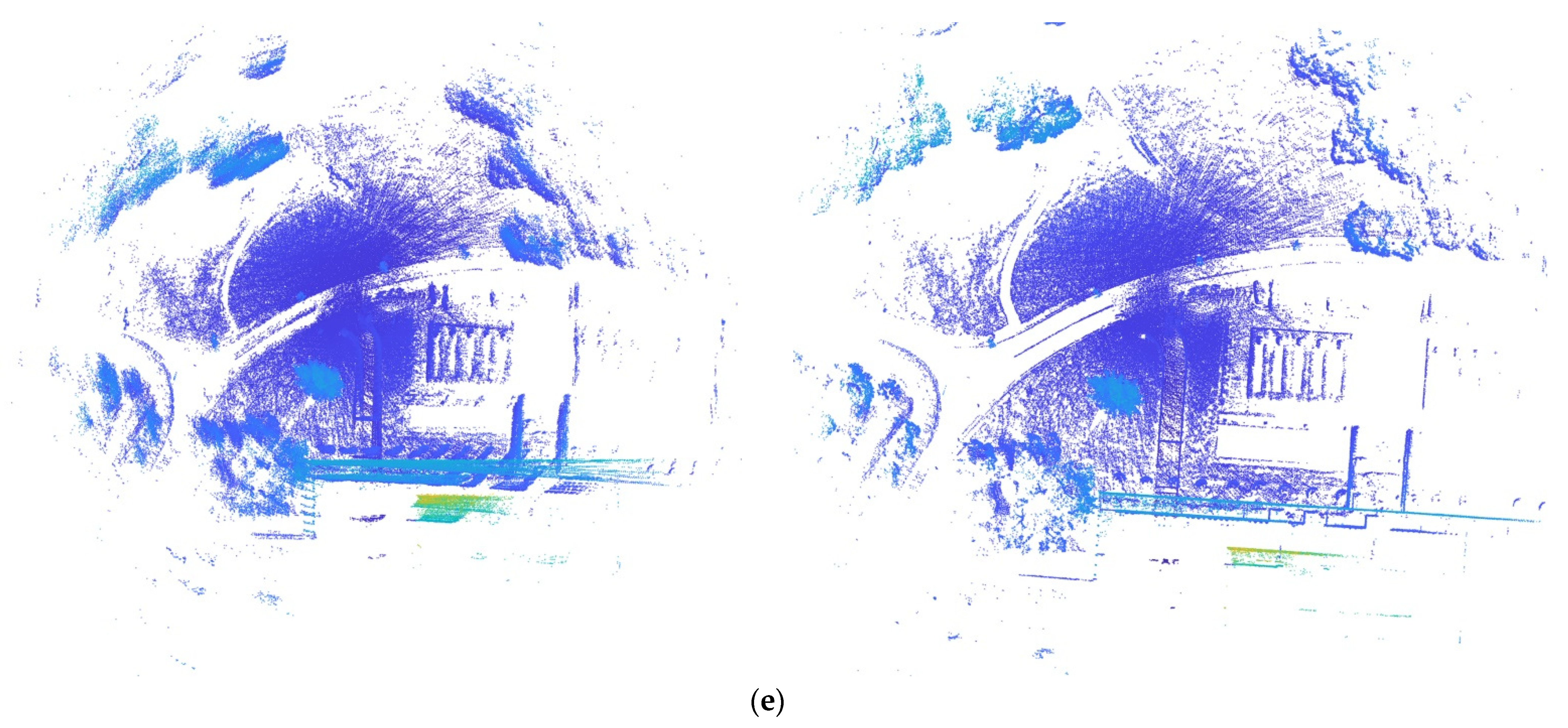
4.2.4. Registration Performance
- Registration accuracy
- 2.
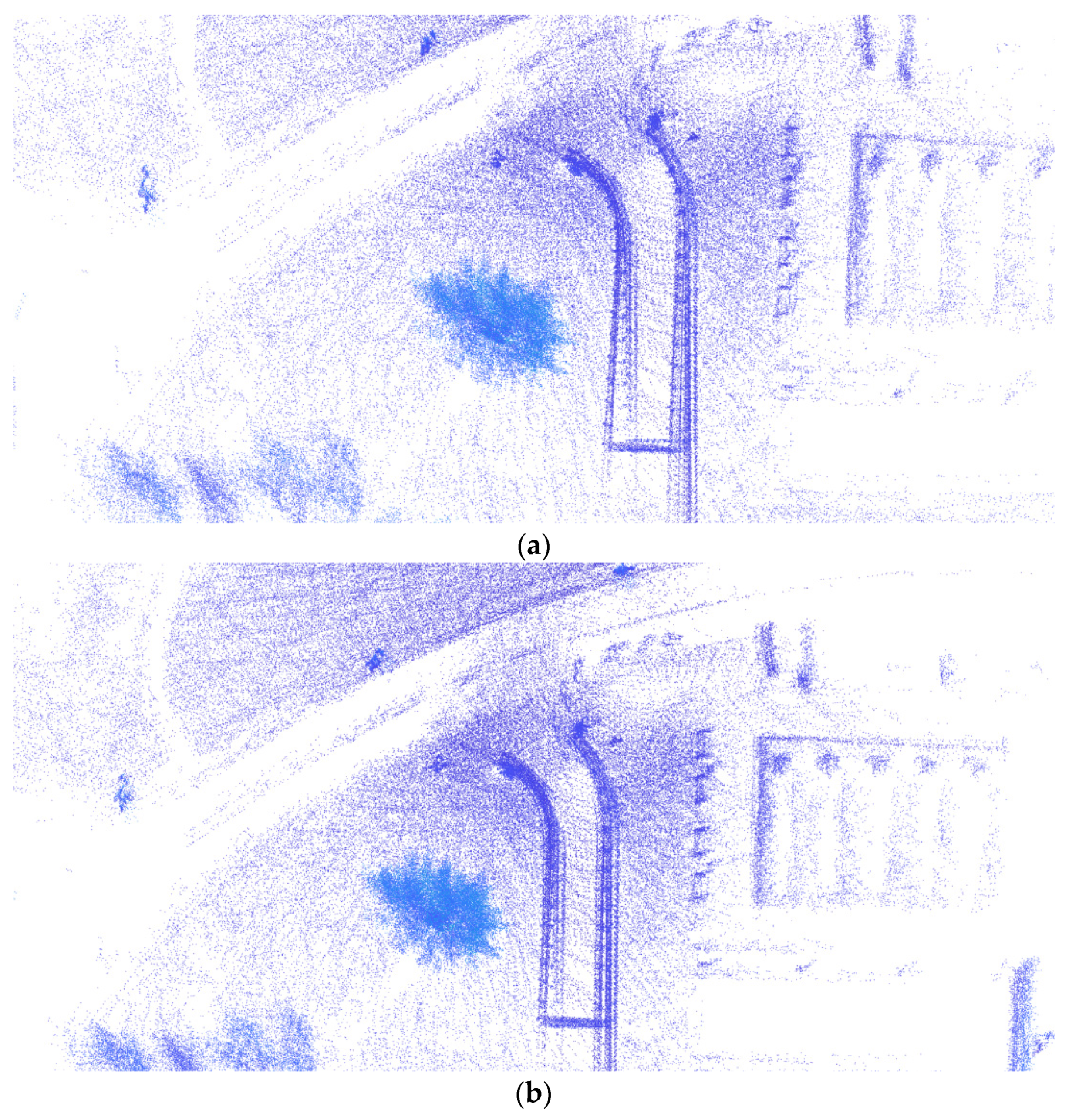
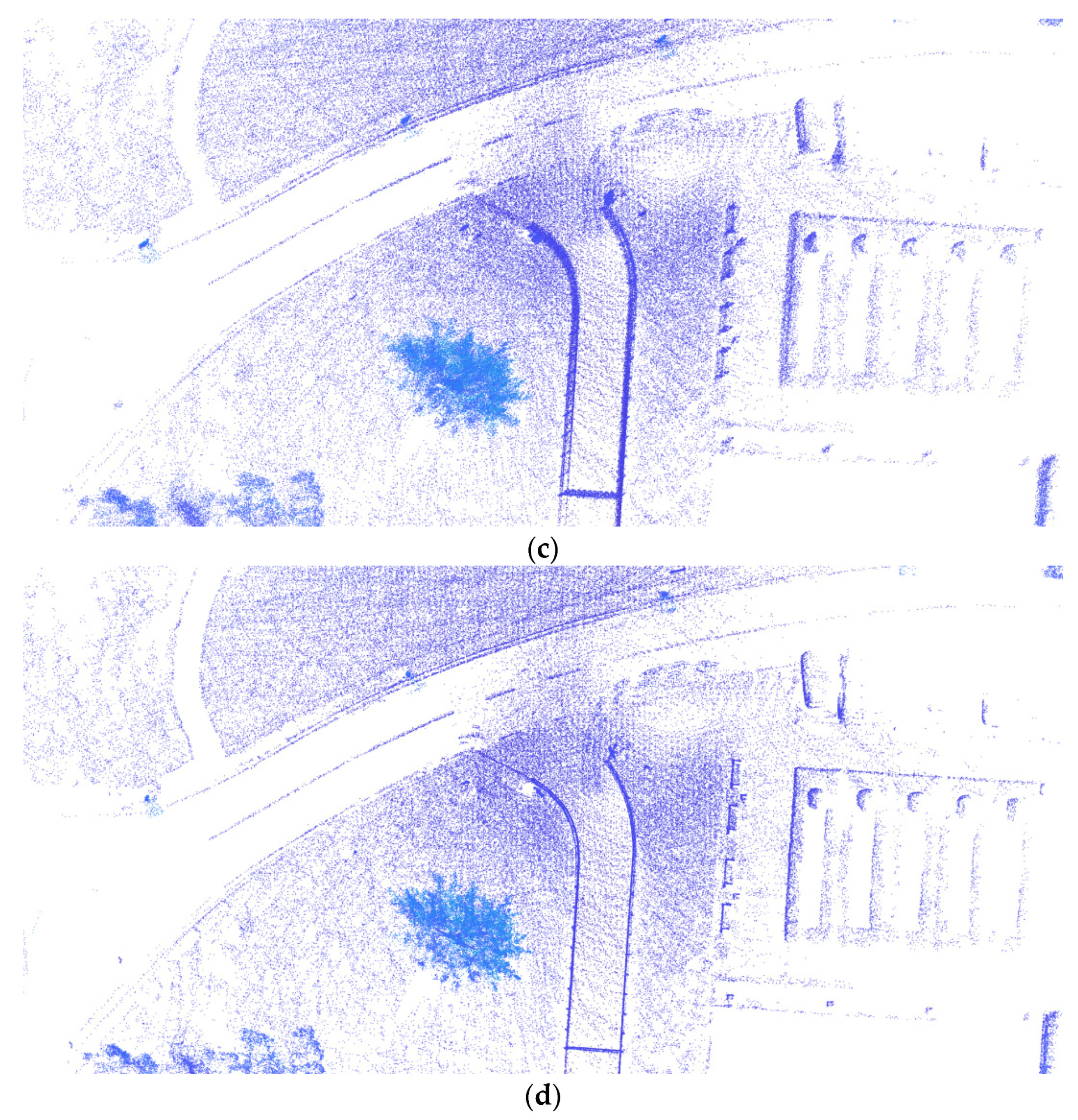
- Visual evaluation of local submaps
- 3.
- Efficiency
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A. IMU Measurement Error Model
Appendix B. IMU Navigation Equation
Appendix C. IMU Navigation Error Equation
Appendix D. MLS Registration Algorithm Based on IMU Trajectory
| Algorithm A1: MLS registration algorithm based on IMU trajectory |
| Input: The time interval ; the initial navigation state ; the IMU measurements , where is number of IMU measurements within ; LiDAR frames , where is the number of frames. |
| Output: The convergence state , IMU trajectory error model parameters and its covariance , IMU trajectory , LiDAR point cloud map . |
| Initialization: |
|
|
|
|
|
|
|
|
|
|
References
- Dong, Z.; Liang, F.; Yang, B.; Xu, Y.; Zang, Y.; Li, J.; Wang, Y.; Dai, W.; Fan, H.; Hyyppä, J.; et al. Registration of large-scale terrestrial laser scanner point clouds: A review and benchmark. ISPRS J. Photogramm. Remote Sens. 2020, 163, 327–342. [Google Scholar] [CrossRef]
- Cheng, L.; Chen, S.; Liu, X.; Xu, H.; Wu, Y.; Li, M.; Chen, Y. Registration of Laser Scanning Point Clouds: A Review. Sensors 2018, 18, 1641. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tam, G.K.L.; Cheng, Z.-Q.; Lai, Y.-K.; Langbein, F.; Liu, Y.; Marshall, D.; Martin, R.R.; Sun, X.; Rosin, P. Registration of 3D Point Clouds and Meshes: A Survey from Rigid to Nonrigid. IEEE Trans. Visual. Comput. Graph. 2013, 19, 1199–1217. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Paneque, J.L.; Dios, J.R.M.; Ollero, A. Multi-Sensor 6-DoF Localization for Aerial Robots in Complex GNSS-Denied Environments. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 3–8 November 2019; pp. 1978–1984. [Google Scholar] [CrossRef]
- Huang, R.; Xu, Y.; Yao, W.; Hoegner, L.; Stilla, U. Robust global registration of point clouds by closed-form solution in the frequency domain. ISPRS J. Photogramm. Remote Sens. 2021, 171, 310–329. [Google Scholar] [CrossRef]
- Besl, P.J.; McKay, N.D. A method for registration of 3-D shapes. IEEE Trans. Pattern Anal. Mach. Intell. 1992, 14, 239–256. [Google Scholar] [CrossRef]
- Aiger, D.; Mitra, N.J.; Cohen-Or, D. 4-points Congruent Sets for Robust Pairwise Surface Registration. ACM Trans. Graph. 2008, 27, 10. [Google Scholar] [CrossRef] [Green Version]
- Charles, R.Q.; Su, H.; Kaichun, M.; Guibas, L.J. PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 77–85. [Google Scholar] [CrossRef] [Green Version]
- Nguyen, H.L.; Belton, D.; Helmholz, P. Review of mobile laser scanning target-free registration methods for urban areas using improved error metrics. Photogram Rec. 2019, 34, 282–303. [Google Scholar] [CrossRef]
- Yan, L.; Tan, J.; Liu, H.; Xie, H.; Chen, C. Automatic non-rigid registration of multi-strip point clouds from mobile laser scanning systems. Int. J. Remote Sens. 2018, 39, 1713–1728. [Google Scholar] [CrossRef]
- Zhang, Y.; Xiong, X.; Zheng, M.; Huang, X. LiDAR Strip Adjustment Using Multifeatures Matched With Aerial Images. IEEE Trans. Geosci. Remote Sens. 2015, 53, 976–987. [Google Scholar] [CrossRef]
- Wendt, A. A concept for feature based data registration by simultaneous consideration of laser scanner data and photogrammetric images. ISPRS J. Photogramm. Remote Sens. 2007, 62, 122–134. [Google Scholar] [CrossRef]
- Han, J.-Y.; Perng, N.-H.; Chen, H.-J. LiDAR Point Cloud Registration by Image Detection Technique. IEEE Geosci. Remote Sens. Lett. 2013, 10, 746–750. [Google Scholar] [CrossRef]
- Abayowa, B.O.; Yilmaz, A.; Hardie, R.C. Automatic registration of optical aerial imagery to a LiDAR point cloud for generation of city models. ISPRS J. Photogramm. Remote Sens. 2015, 106, 68–81. [Google Scholar] [CrossRef]
- Gobakken, T.; Næsset, E. Assessing effects of positioning errors and sample plot size on biophysical stand properties derived from airborne laser scanner data. Can. J. For. Res. 2009, 39, 1036–1052. [Google Scholar] [CrossRef]
- Shan, T.; Englot, B.; Ratti, C.; Rus, D. LVI-SAM: Tightly-Coupled Lidar-Visual-Inertial Odometry via Smoothing and Mapping. arXiv 2021, arXiv:2104.10831. [Google Scholar]
- Gressin, A.; Cannelle, B.; Mallet, C.; Papelard, J.-P. Trajectory-Based Registration of 3D Lidar Point Clouds Acquired with a Mobile Mapping System. ISPRS Ann. Photogramm. Remote Sens. Spatial Inf. Sci. 2012, I-3, 117–122. [Google Scholar] [CrossRef] [Green Version]
- Takai, S.; Date, H.; Kanai, S.; Niina, Y.; Oda, K.; Ikeda, T. Accurate registration of MMS point clouds of urban areas using trajectory. ISPRS Ann. Photogramm. Remote Sens. Spatial Inf. Sci. 2013, II-5/W2, 277–282. [Google Scholar] [CrossRef] [Green Version]
- Qin, T.; Li, P.; Shen, S. VINS-Mono: A Robust and Versatile Monocular Visual-Inertial State Estimator. IEEE Trans. Robot. 2018, 34, 1004–1020. [Google Scholar] [CrossRef] [Green Version]
- Shan, T.; Englot, B.; Meyers, D.; Wang, W.; Ratti, C.; Rus, D. LIO-SAM: Tightly-Coupled Lidar Inertial Odometry via Smoothing and Mapping. arXiv 2020, arXiv:2007.00258. [Google Scholar]
- Zhao, S.; Zhang, H.; Wang, P.; Nogueira, L.; Scherer, S. Super Odometry: IMU-Centric LiDAR-Visual-Inertial Estimator for Challenging Environments. arXiv 2021, arXiv:2104.14938. [Google Scholar]
- Bae, K.-H.; Lichti, D.D. A method for automated registration of unorganised point clouds. ISPRS J. Photogramm. Remote Sens. 2008, 63, 36–54. [Google Scholar] [CrossRef]
- Chetverikov, D.; Svirko, D.; Stepanov, D.; Krsek, P. The Trimmed Iterative Closest Point algorithm. In Proceedings of the Object Recognition Supported by User Interaction for Service Robots, Quebec City, QC, Canada, 11–15 August 2002; Volume 3, pp. 545–548. [Google Scholar] [CrossRef]
- Pavlov, A.L.; Ovchinnikov, G.W.V.; Derbyshev, D.Y.; Tsetserukou, D.; Oseledets, I.V. AA-ICP: Iterative Closest Point with Anderson Acceleration. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, QLD, Australia, 21–25 May 2018; pp. 3407–3412. [Google Scholar] [CrossRef] [Green Version]
- Serafin, J.; Grisetti, G. NICP: Dense Normal Based Point Cloud Registration. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 742–749. [Google Scholar] [CrossRef] [Green Version]
- Rusu, R.B.; Blodow, N.; Beetz, M. Fast Point Feature Histograms (FPFH) for 3D Registration. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 3212–3217. [Google Scholar] [CrossRef]
- Guo, Y.; Sohel, F.; Bennamoun, M.; Lu, M.; Wan, J. Rotational Projection Statistics for 3D Local Surface Description and Object Recognition. Int. J. Comput. Vis. 2013, 105, 63–86. [Google Scholar] [CrossRef] [Green Version]
- Salti, S.; Tombari, F.; di Stefano, L. SHOT: Unique signatures of histograms for surface and texture description. Comput. Vis. Image Underst. 2014, 125, 251–264. [Google Scholar] [CrossRef]
- Qi, C.R.; Yi, L.; Su, H.; Guibas, L.J. PointNet++: Deep Hierarchical Feature Learning on Point Sets in a Metric Space. arXiv 2017, arXiv:1706.02413. [Google Scholar]
- Aoki, Y.; Goforth, H.; Srivatsan, R.A.; Lucey, S. PointNetLK: Robust & Efficient Point Cloud Registration Using PointNet. In Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 15–20 June 2019; pp. 7156–7165. [Google Scholar] [CrossRef] [Green Version]
- Forster, C.; Carlone, L.; Dellaert, F.; Scaramuzza, D. On-Manifold Preintegration for Real-Time Visual—Inertial Odometry. IEEE Trans. Robot. 2017, 33, 1–21. [Google Scholar] [CrossRef] [Green Version]
- Wu, J. MARG Attitude Estimation Using Gradient-Descent Linear Kalman Filter. IEEE Trans. Automat. Sci. Eng. 2020, 17, 1777–1790. [Google Scholar] [CrossRef]
- Wu, J.; Zhang, S.; Zhu, Y.; Getng, R.; Fu, Z.; Ma, F.; Liu, M. Differential Information Aided 3-D Registration for Accurate Navigation and Scene Reconstruction. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021; pp. 9249–9254. [Google Scholar] [CrossRef]
- Zhang, J.; Singh, S. Low-drift and real-time lidar odometry and mapping. Auton. Robot. 2017, 41, 401–416. [Google Scholar] [CrossRef]
- Gentil, C.L.; Vidal-Calleja, T.; Huang, S. IN2LAMA: INertial Lidar Localisation And MApping. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 6388–6394. [Google Scholar] [CrossRef]
- Bosse, M.; Zlot, R.; Flick, P. Zebedee: Design of a Spring-Mounted 3-D Range Sensor with Application to Mobile Mapping. IEEE Trans. Robot. 2012, 28, 1104–1119. [Google Scholar] [CrossRef]
- Xu, W.; Zhang, F. FAST-LIO: A Fast, Robust LiDAR-inertial Odometry Package by Tightly-Coupled Iterated Kalman Filter. arXiv 2021, arXiv:2010.08196. [Google Scholar] [CrossRef]
- Qin, C.; Ye, H.; Pranata, C.E.; Han, J.; Zhang, S.; Liu, M. LINS: A Lidar-Inertial State Estimator for Robust and Efficient Navigation. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 8899–8906. [Google Scholar] [CrossRef]
- Zhang, J.; Singh, S. Laser-visual-inertial odometry and mapping with high robustness and low drift. J. Field Robot. 2018, 35, 1242–1264. [Google Scholar] [CrossRef]
- Shin, E.H. Estimation Techniques for Low-Cost Inertial Navigation. In UCGE Report; University of Calgary: Calgary, AB, Canada, 2005. [Google Scholar]
- Pomerleau, F.; Colas, F.; Siegwart, R. A Review of Point Cloud Registration Algorithms for Mobile Robotics. Found. Trends Robot. 2015, 4, 1–104. [Google Scholar] [CrossRef] [Green Version]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Verification Distance | dours/m | dZ+F/m | ed/m |
|---|---|---|---|
| d1 | 46.05 | 46.08 | −0.03 |
| d2 | 14.7 | 14.65 | 0.05 |
| d3 | 67.96 | 67.99 | −0.03 |
| d4 | 22.52 | 22.54 | −0.02 |
| d5 | 48.33 | 48.34 | −0.01 |
| d6 | 90.86 | 90.89 | −0.03 |
| d7 | 36.35 | 36.36 | −0.01 |
| RMSE | 0.029 |
| Verification Point | hours/m | hZ+F/m | eh/m |
|---|---|---|---|
| p1 | −1.95 | −1.92 | −0.03 |
| p2 | −1.93 | −1.92 | −0.01 |
| p3 | −1.95 | −1.93 | −0.02 |
| p4 | −1.91 | −1.95 | 0.04 |
| p5 | −1.93 | −1.93 | 0.00 |
| p6 | −1.94 | −1.95 | 0.01 |
| p7 | −1.93 | −1.94 | 0.01 |
| RMSE | 0.021 |
| Method | Scene 1 RMS | Scene 2 RMS | Scene 3 RMS | Scene 4 RMS | Scene 5 RMS |
|---|---|---|---|---|---|
| ICP | 0.272 m | 0.164 m | 0.586 m | 0.671 m | 0.692 m |
| NICP | 0.206 m | 0.154 m | 0.470 m | 0.453 m | 0.526 m |
| IMU-aided ICP | 0.177 m | 0.134 m | 0.193 m | 0.289 m | 0.405 m |
| Our method | 0.155 m | 0.123 m | 0.178 m | 0.258 m | 0.367 m |
| Method | Running Time/Seconds |
|---|---|
| ICP | 80.54 |
| NICP | 63.25 |
| IMU-aided ICP | 22.86 |
| Our method | 28.05 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Z.; Li, Q.; Li, J.; Zhang, D.; Yu, J.; Yin, Y.; Lv, S.; Liang, A. IMU-Aided Registration of MLS Point Clouds Using Inertial Trajectory Error Model and Least Squares Optimization. Remote Sens. 2022, 14, 1365. https://doi.org/10.3390/rs14061365
Chen Z, Li Q, Li J, Zhang D, Yu J, Yin Y, Lv S, Liang A. IMU-Aided Registration of MLS Point Clouds Using Inertial Trajectory Error Model and Least Squares Optimization. Remote Sensing. 2022; 14(6):1365. https://doi.org/10.3390/rs14061365
Chicago/Turabian StyleChen, Zhipeng, Qingquan Li, Jiayuan Li, Dejin Zhang, Jianwei Yu, Yu Yin, Shiwang Lv, and Anbang Liang. 2022. "IMU-Aided Registration of MLS Point Clouds Using Inertial Trajectory Error Model and Least Squares Optimization" Remote Sensing 14, no. 6: 1365. https://doi.org/10.3390/rs14061365
APA StyleChen, Z., Li, Q., Li, J., Zhang, D., Yu, J., Yin, Y., Lv, S., & Liang, A. (2022). IMU-Aided Registration of MLS Point Clouds Using Inertial Trajectory Error Model and Least Squares Optimization. Remote Sensing, 14(6), 1365. https://doi.org/10.3390/rs14061365