
Assessment of Nighttime Cloud Cover Products from MODIS and Himawari-8 Data with Ground-Based Camera Observations



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Cloud Observations from Ground-Based Cameras and Satellites
2.1. Camera Observations of Clouds
2.2. Ground Camera System
2.3. Moderate Resolution Imaging Spectrometer (MODIS) Data
2.4. Himawari-8 Data
2.5. National Institute for Environmental Studies (NIES) Lidar
3. Methodology
4. Results and Discussion
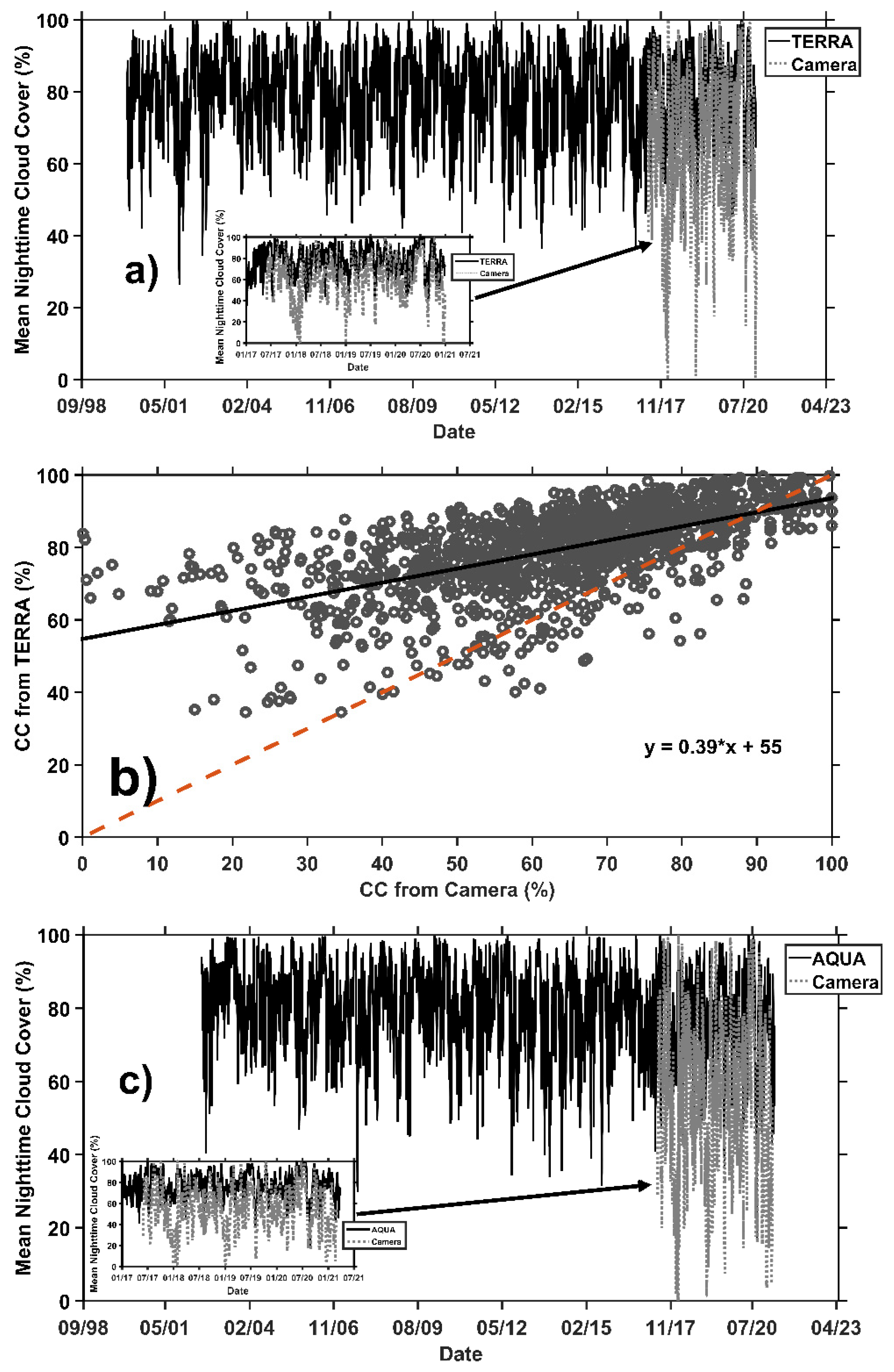
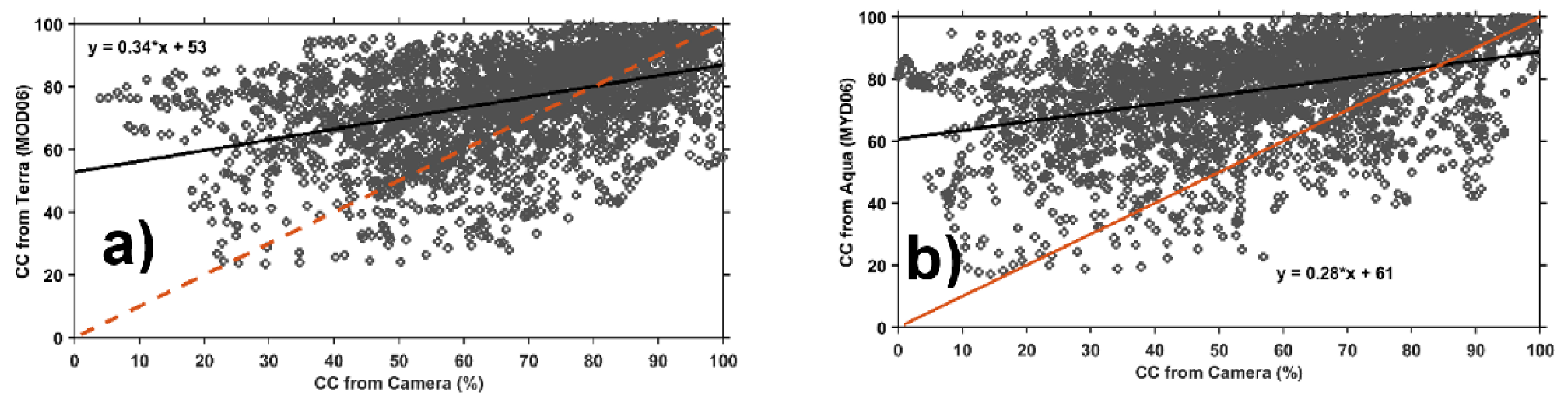
4.1. Ground Camera vs. MOD08 and MYD08 CC Products
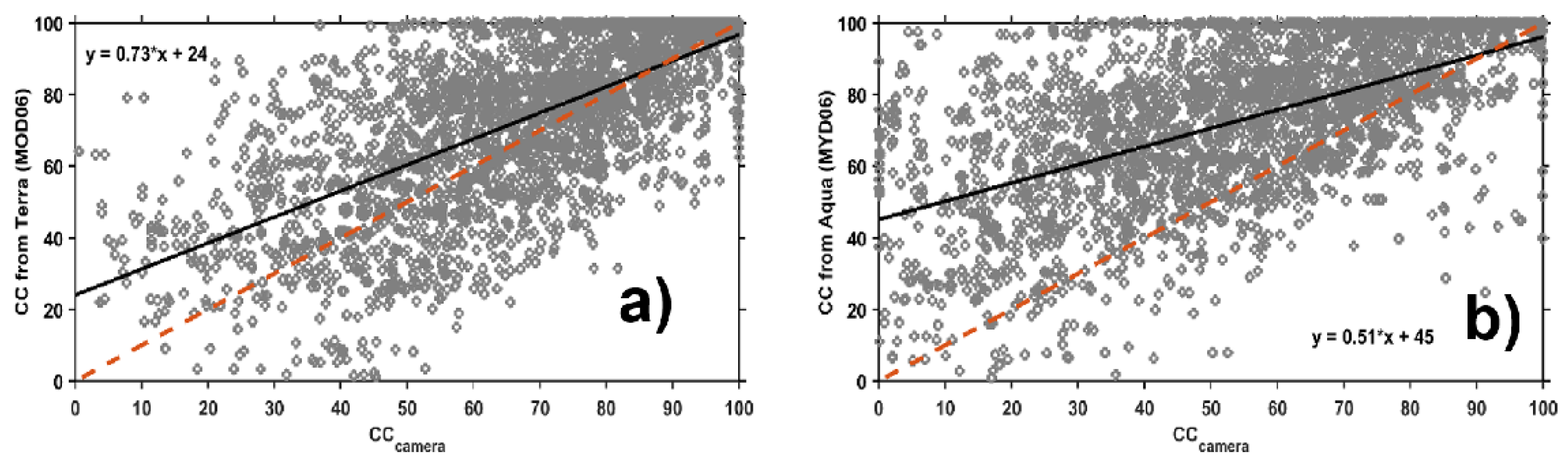
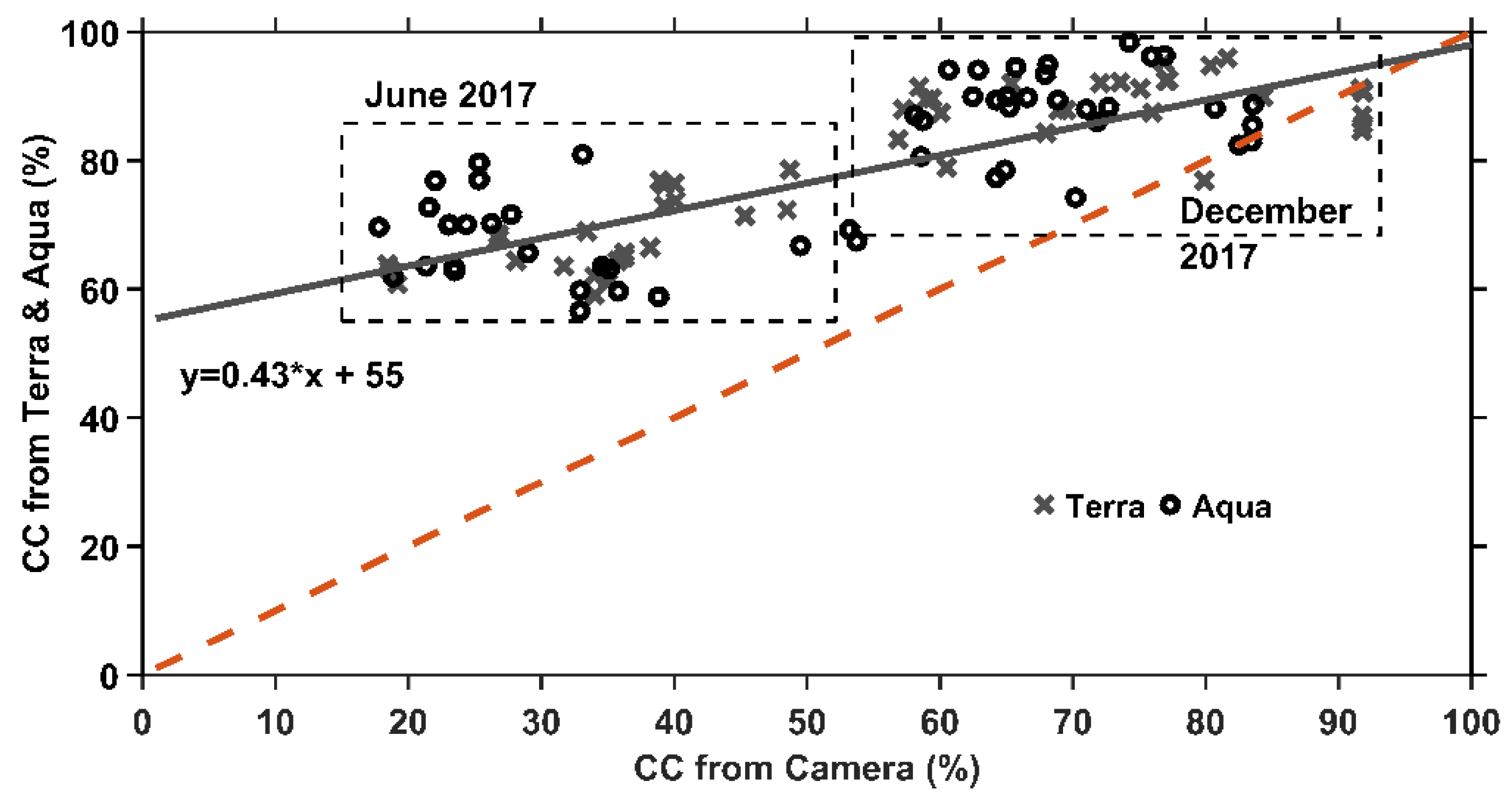
4.2. Ground Camera vs. MOD06 and MYD06 CC Products
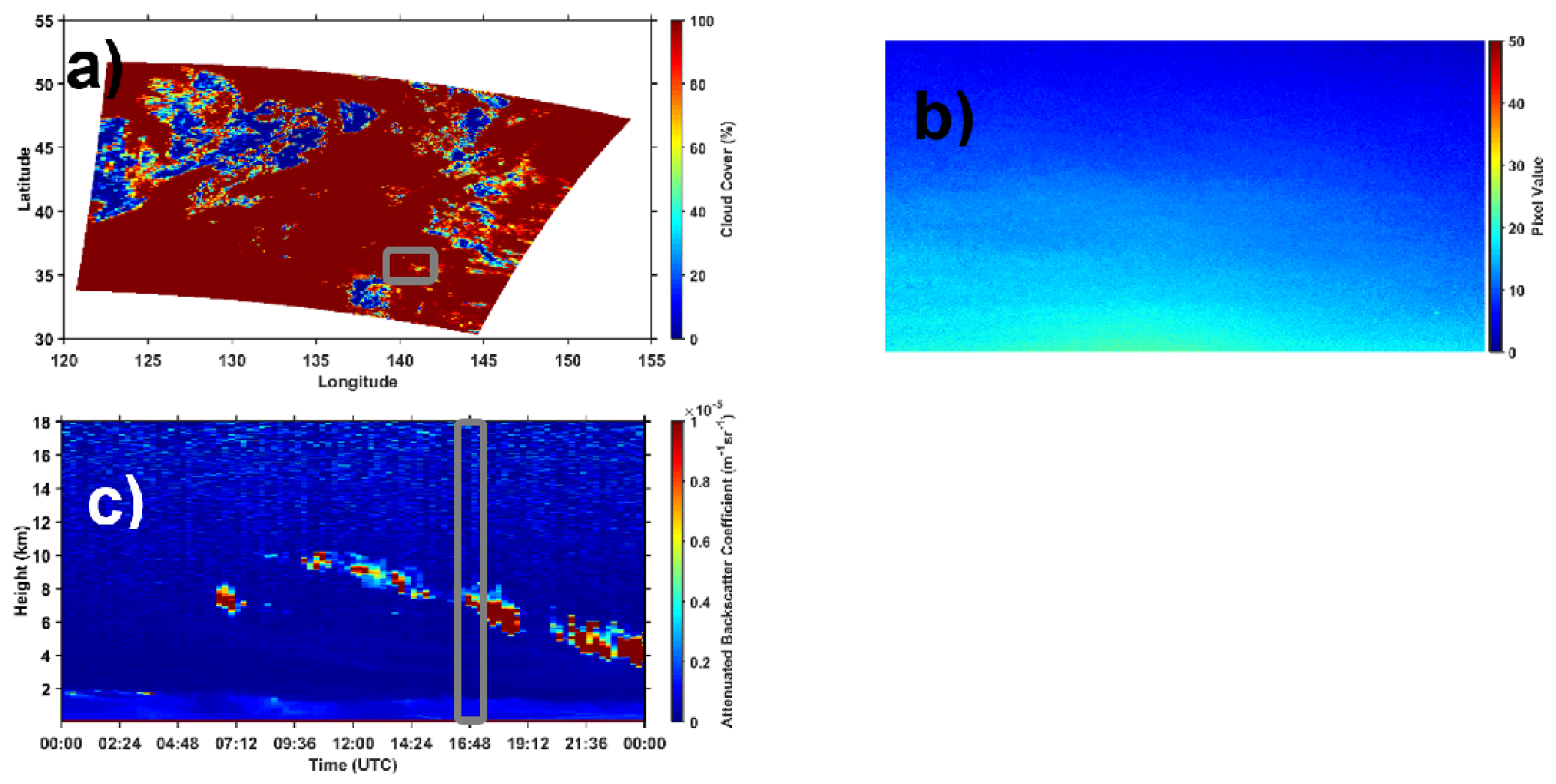
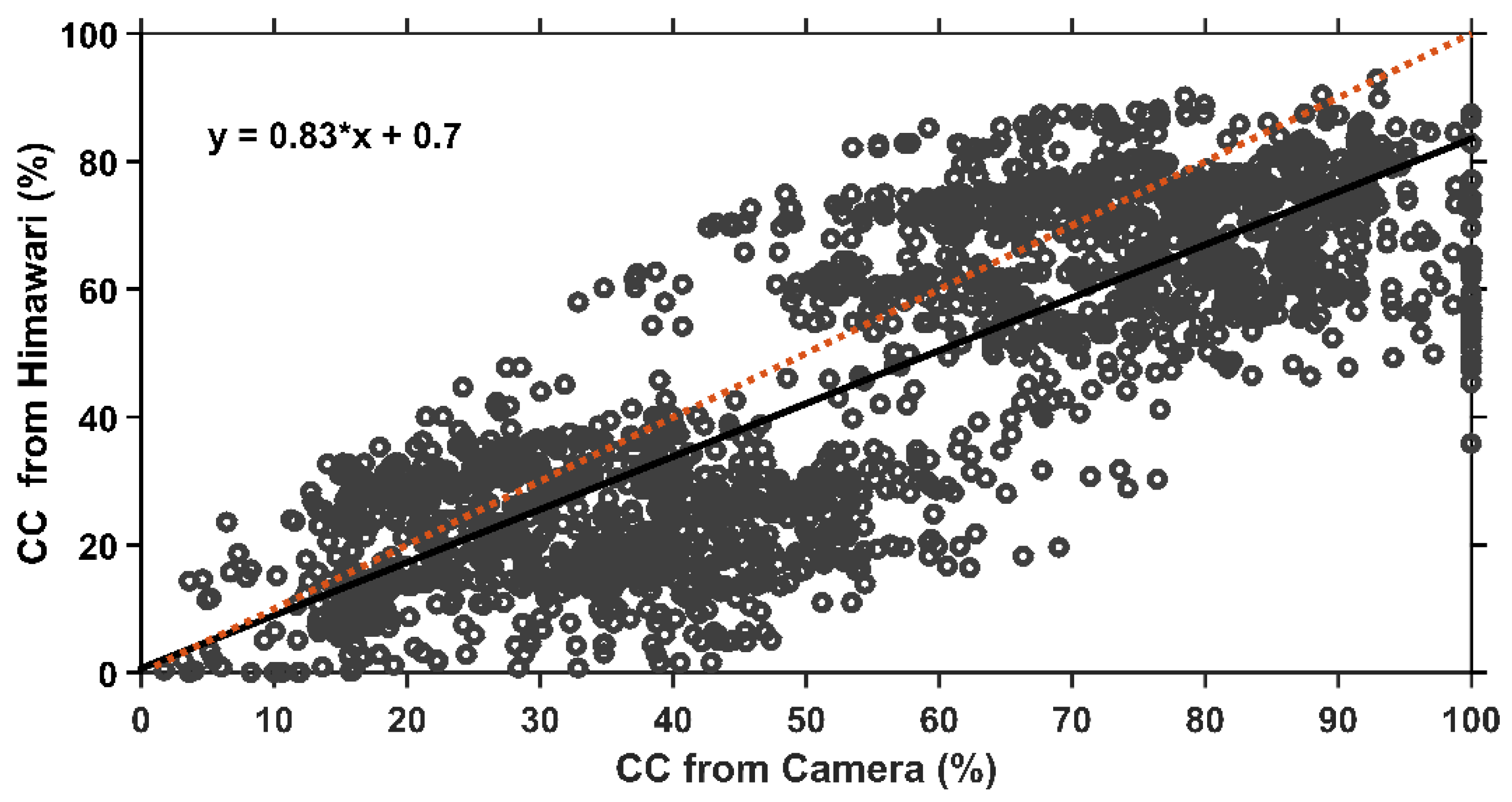
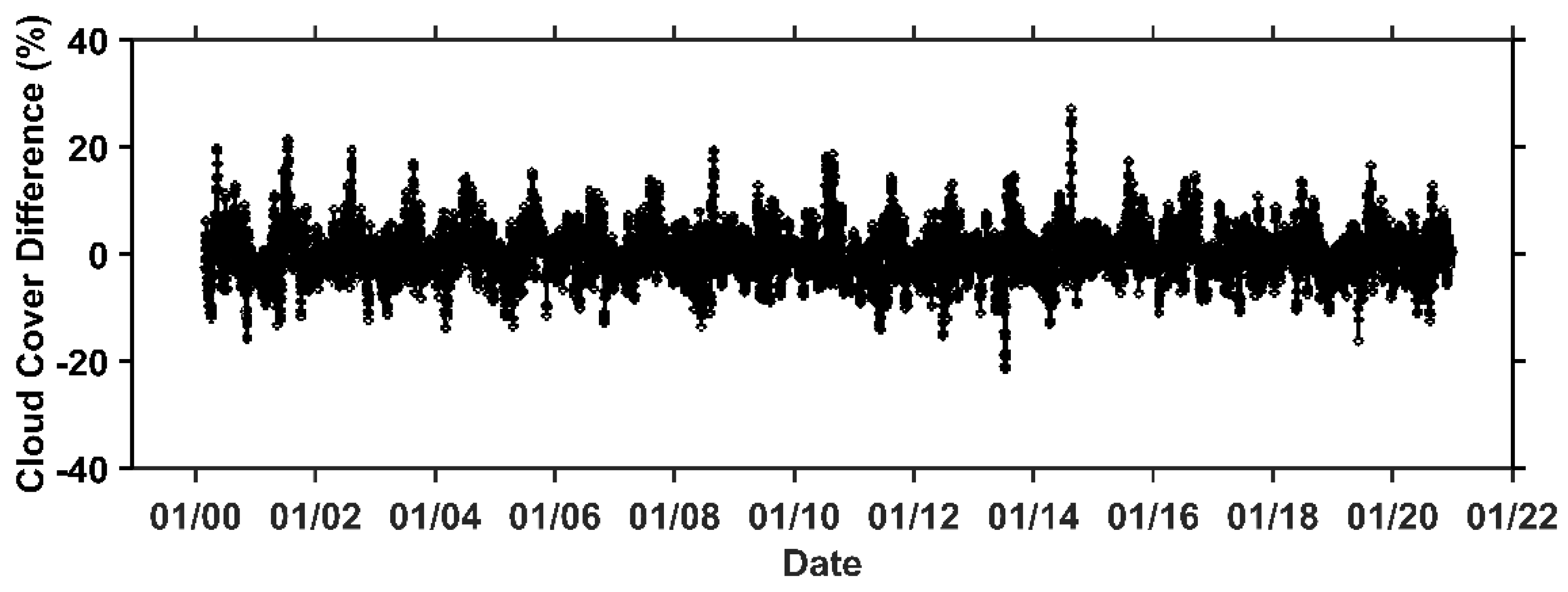
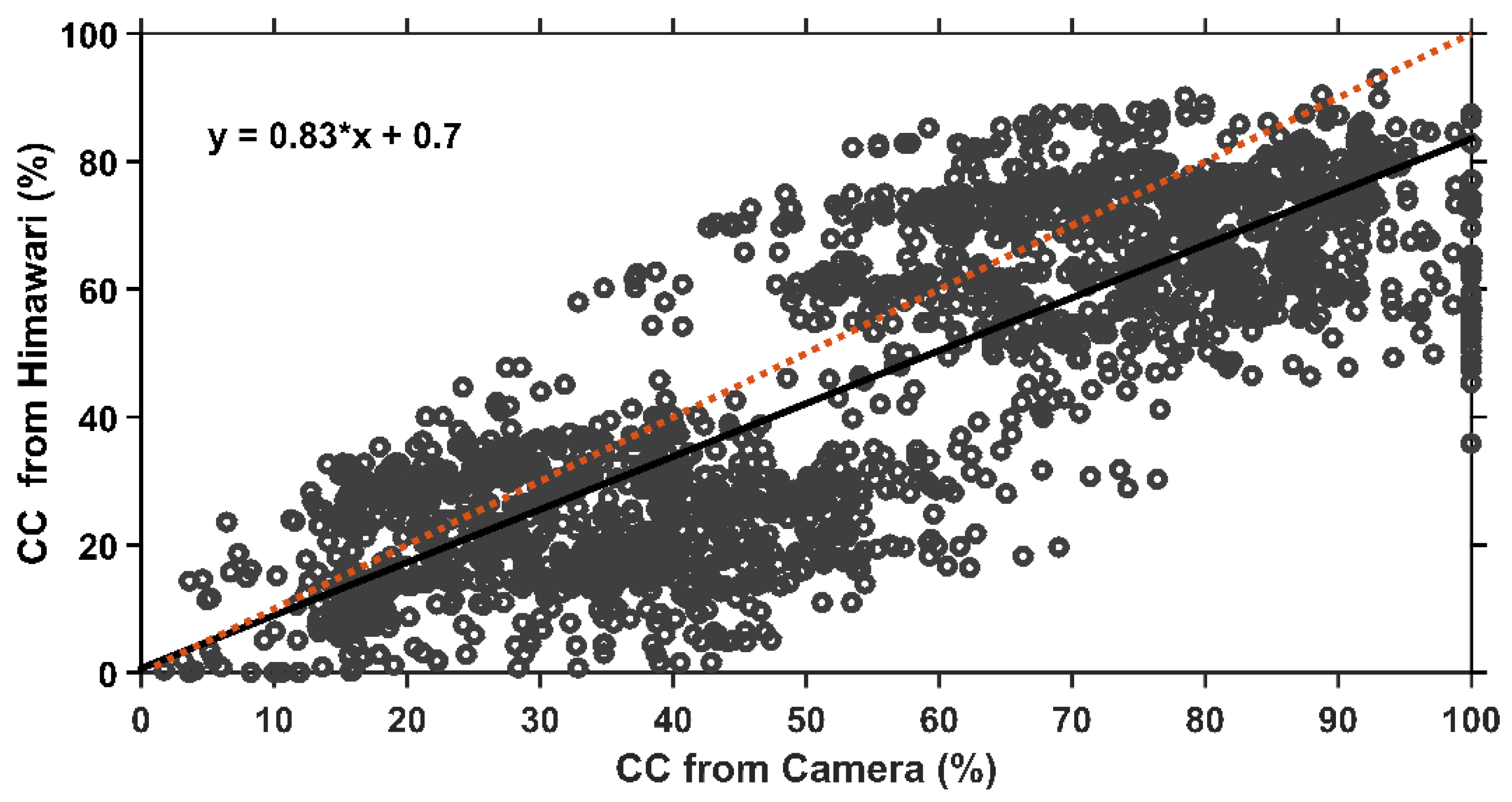
4.3. Comparison of CC from Himawari-8 and Camera
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Liu, Y.; Wu, W.; Jensen, M.P.; Toto, T. Relationship between cloud radiative forcing, cloud fraction and cloud albedo, and new surface-based approach for determining cloud albedo. Atmos. Chem. Phys. 2011, 11, 7155–7170. [Google Scholar] [CrossRef] [Green Version]
- Qian, Y.; Long, C.N.; Wang, H.; Comstock, J.M.; McFarlane, S.A.; Xie, S. Evaluation of cloud fraction and its radiative effect simulated by IPCC AR4 global models against ARM surface observations. Atmos. Chem. Phys. 2012, 12, 1785–1810. [Google Scholar] [CrossRef] [Green Version]
- Cawkwell, F.; Bamber, J. The impact of cloud cover on the net radiation budget of the Greenland ice sheet. Ann. Glaciol. 2002, 34, 141–149. [Google Scholar] [CrossRef] [Green Version]
- Walsh, J.E.; Chapman, W.L.; Portis, D.H. Arctic Cloud Fraction and Radiative Fluxes in Atmospheric Reanalyses. J. Clim. 2009, 22, 2316–2334. [Google Scholar] [CrossRef]
- Boucher, O.; Randall, D.; Artaxo, P.; Bretherton, C.; Feingold, G.; Forster, P.; Kerminen, V.-M.; Kondo, Y.; Liao, H.; Lohmann, U.; et al. Clouds and Aerosols. In Climate Change 2013: The Physical Science Basis. Contribution of Working Group I to the Fifth Assessment Report of the Intergovernmental Panel on Climate Change; Stocker, T.F., Qin, D., Plattner, G.-K., Tignor, M., Allen, S.K., Boschung, J., Nauels, A., Xia, Y., Bex, V., Midgley, P.M., Eds.; Cambridge University Press: Cambridge, UK; New York, NY, USA, 2013. [Google Scholar]
- Zelinka, M.D.; Randall, D.A.; Webb, M.J.; Klein, S.A. Clearing clouds of uncertainty. Nat. Clim. Chang. 2017, 7, 674–677. [Google Scholar] [CrossRef]
- Aebi, C.; Gröbner, J.; Kämpfer, N.; Vuilleumier, L. Cloud radiative effect, cloud fraction and cloud type at two stations in Switzerland using hemispherical sky cameras. Atmos. Meas. Tech. 2017, 10, 4587–4600. [Google Scholar] [CrossRef] [Green Version]
- Chen, T.; Rossow, W.B.; Zhang, Y. Radiative effects of cloud-type variations. J. Clim. 2000, 13, 264–286. [Google Scholar] [CrossRef]
- Mace, G.G.; Berry, E. Using active remote sensing to evaluate cloud-climate feedbacks: A review and look to the future. Curr. Clim. Chang. Rep. 2017, 3, 185–192. [Google Scholar] [CrossRef] [Green Version]
- Winker, D.; Chepfer, H.; Noel, V.; Cai, X. Observational constraints on cloud feedbacks: The role of active sensors. Surv. Geophys. 2017, 38, 1483–1508. [Google Scholar] [CrossRef] [Green Version]
- Allan, R.P. Combining satellite data and models to estimate cloud radiative effect at the surface and in the atmosphere. Meteorol. Appl. 2011, 18, 324–333. [Google Scholar] [CrossRef]
- Norris, J.R.; Allen, R.J.; Evan, A.T.; Zelinka, M.D.; O’Dell, C.W.; Klein, S.A. Evidence for climate change in the satellite cloud record. Nature 2016, 536, 72–75. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bessho, K.; Date, K.; Hayashi, M.; Ikeda, A.; Imai, T.; Inoue, H.; Kumagai, Y.; Miyakawa, T.; Murata, H.; Ohno, T.; et al. An introduction to Himawari-8/9—Japan’s new-generation geostationary meteorological satellites. J. Meteorol. Soc. Jpn. 2016, 94, 151–183. [Google Scholar] [CrossRef] [Green Version]
- Rossow, W.; Dueñas, E. The International Satellite Cloud Climatology Project (ISCCP) web site: An online resource for research. Bull. Am. Meteorol. Soc. 2004, 85, 167–172. [Google Scholar] [CrossRef]
- Cess, R.; Udelhofen, P. Climate change during 1985-1999: Cloud interactions determined from satellite measurements. Geophys. Res. Lett. 2003, 30, 1019. [Google Scholar] [CrossRef]
- Rossow, W.; Walker, A.; Garder, L. Comparison of ISCCP and other cloud amounts. J. Clim. 1993, 6, 2394–2418. [Google Scholar] [CrossRef] [Green Version]
- Karlsson, K.-G.; Devasthale, A. Inter-Comparison and Evaluation of the Four Longest Satellite-Derived Cloud Climate Data Records: CLARA-A2, ESA Cloud CCI V3, ISCCP-HGM, and PATMOS-x. Remote Sens. 2018, 10, 1567. [Google Scholar] [CrossRef] [Green Version]
- Stubenrauch, C.J.; Rossow, W.B.; Kinne, S.; Ackerman, S.; Cesana, G.; Chepfer, H.; Di Girolamo, L.; Getzewich, B.; Guignard, A.; Heidinger, A.; et al. Assessment of Global Cloud Datasets from Satellites: Project and Database Initiated by the GEWEX Radiation Panel, Bull. Am. Meteorol. Soc. 2013, 94, 1031–1049. [Google Scholar] [CrossRef]
- An, N.; Wang, K. A comparison of MODIS-derived cloud fraction with surface observations at five SURFRAD sites. J. Appl. Meteorol. Climatol. 2015, 54, 1009–1020. [Google Scholar] [CrossRef]
- Wang, Y.; Zhao, C. Can MODIS cloud fraction fully represent the diurnal and seasonal variations at DOE ARM SGP and Manus sites? J. Geophys. Res. Atmos. 2017, 122, 329–343. [Google Scholar] [CrossRef]
- Ma, J.; Wu, H.; Wang, C.; Zhang, X.; Li, Z.; Wang, X. Multiyear satellite and surface observations of clouds fraction over China. J. Geophys. Res. Atmos. 2014, 119, 7655–7666. [Google Scholar] [CrossRef]
- Werkmeister, A.; Lockhoff, M.; Schrempf, M.; Tohsing, K.; Liley, B.; Seckmeyer, G. Comparing satellite- to ground-based automated and manual cloud coverage observations—A case study. Atmos. Meas. Tech. 2015, 8, 2001–2015. [Google Scholar] [CrossRef] [Green Version]
- Lagrosas, N.; Shiina, T.; Kuze, H. Observations of nighttime clouds over Chiba, Japan, using digital cameras and satellite images. J. Geophys. Res. Atmos. 2021, 126, e2021JD034772. [Google Scholar] [CrossRef]
- Alonso-Montesinos, J. Real-time automatic cloud detection using a low-cost sky camera. Remote Sens. 2020, 12, 1382. [Google Scholar] [CrossRef]
- Cazorla, A.; Olmo, F.J.; Alados-Arboledas, L. Development of a sky imager for cloud cover assessment. J. Opt. Soc. Am. A 2008, 25, 29–39. [Google Scholar] [CrossRef]
- Gacal, G.F.; Antioquia, C.; Lagrosas, N. Ground-based detection of nighttime clouds above Manila Observatory (14.64°N, 121.07°E) using a digital camera. Appl. Opt. 2016, 55, 6040–6045. [Google Scholar] [CrossRef]
- Klebe, D.I.; Blatherwick, R.D.; Morris, V.R. Ground-based all-sky mid-infrared and visible imagery for purposes of characterizing cloud properties. Atmos. Meas. Tech. 2014, 7, 637–645. [Google Scholar] [CrossRef] [Green Version]
- Redman, B.J.; Shaw, J.A.; Nugent, P.W.; Clark, R.T.; Piazolla, S. Reflective all-sky thermal infrared cloud imager. Opt. Express 2018, 26, 11276–11283. [Google Scholar] [CrossRef] [Green Version]
- Smith, S.; Toumi, R. Measuring cloud cover and brightness temperature using a ground-based thermal infrared camera. J. Appl. Meteorol. Climatol. 2008, 47, 683–693. [Google Scholar] [CrossRef]
- Shields, J.E.; Karr, M.E.; Johnson, R.W.; Burden, A.R. Day/night whole sky imagers for 24-h cloud and sky assessment: History and overview. Appl. Opt. 2013, 52, 1605–1616. [Google Scholar] [CrossRef]
- Souza-Echer, M.P.; Pereira, E.B.; Bins, L.S.; Andrade, M.A.R. A simple method for the assessment of the cloud cover state in high-altitude regions by a ground-based digital camera. J. Atmos. Ocean. Tech. 2006, 23, 437–447. [Google Scholar] [CrossRef]
- Wacker, S.; Gröbner, J.; Zysset, C.; Diener, L.; Tzoumanikas, P.; Kazantzidis, A.; Vuilleumier, L.; Stöckli, R.; Nyeki, S.; Kämpfer, N. Cloud observations in Switzerland using hemispherical sky cameras. J. Geophys. Res. 2015, 120, 695–707. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Liu, D.; Xie, W.; Yang, M.; Gao, Z.; Ling, X.; Huang, Y.; Li, C.; Liu, Y.; Xia, Y. Day and night clouds detection using a thermal-infrared all-sky-view camera. Remote Sens. 2021, 13, 1852. [Google Scholar] [CrossRef]
- Long, C.N.; Sabburg, J.M.; Calbó, J.; Pagès, D. Retrieving cloud characteristics from ground-based daytime color all-sky images. J. Atmos. Ocean. Tech. 2006, 23, 633–652. [Google Scholar] [CrossRef] [Green Version]
- Ghonima, M.S.; Urquhart, B.; Chow, C.W.; Shields, J.E.; Cazorla, A.; Kleissl, J. A method for cloud detection and opacity classification based on ground based sky imagery. Atmos. Meas. Tech. 2012, 5, 2881–2892. [Google Scholar] [CrossRef] [Green Version]
- Heinle, A.; Macke, A.; Srivastav, A. Automatic cloud classification of whole sky images. Atmos. Meas. Tech. 2010, 3, 557–567. [Google Scholar] [CrossRef] [Green Version]
- Li, Q.; Lu, W.; Yang, J. A Hybrid Thresholding Algorithm for Cloud Detection on Ground-Based Color Images. J. Atmos. Ocean. Tech. 2011, 28, 1286–1296. [Google Scholar] [CrossRef]
- Yang, J.; Min, Q.; Lu, W.; Yao, W.; Ma, Y.; Du, J.; Lu, T.; Liu, G. An automated cloud detection method based on the green channel of total-sky visible images. Atmos. Meas. Tech. 2015, 8, 4671–4679. [Google Scholar] [CrossRef] [Green Version]
- Carson, C.; Belongie, S.; Greenspan, H.; Malik, J. Blobworld: Image segmentation using expectation-maximization and its application to image querying. IEEE PAMI 2002, 24, 1026–1038. [Google Scholar] [CrossRef] [Green Version]
- Mantelli Neto, S.L.; von Wangenheim, A.; Pereira, E.B.; Comunello, E. The use of Eucledian geometric distance on RGB color space for the classification of sky and cloud patterns. J. Atmos. Ocean. Tech. 2010, 27, 1504–1517. [Google Scholar] [CrossRef] [Green Version]
- Gacal, G.F.; Antioquia, C.; Lagrosas, N. Trends of nighttime hourly cloud-cover values over Manila Observatory: Ground-based remote-sensing observations using a digital camera for 13 months. Int. J. Remote Sens. 2018, 39, 7628–7642. [Google Scholar] [CrossRef]
- Ackerman, S.A.; Strabala, K.I.; Menzel, W.P.; Frey, R.A.; Moeller, C.C.; Gumley, L.E. Discriminating clear sky from clouds with MODIS. J. Geophys. Res. 1998, 103, 32141–32157. [Google Scholar] [CrossRef]
- Frey, R.A.; Ackerman, S.A.; Liu, Y.; Strabala, K.I.; Zhang, H.; Key, J.R.; Wang, X. Cloud Detection with MODIS. Part I: Improvements in the MODIS Cloud Mask for Collection 5. J. Atmos. Ocean. Tech. 2008, 25, 1057–1072. [Google Scholar] [CrossRef]
- Ackerman, S.; Frey, R.; Strabala, K.; Liu, Y.; Gumley, L.; Baum, B.; Menzel, P. Discriminating Clear-Sky from Cloud with MODIS Algorithm Theoretical Basis Document (MOD35). Available online: https://atmosphere-imager.gsfc.nasa.gov/sites/default/files/ModAtmo/MOD35_ATBD_Collection6_1.pdf (accessed on 12 December 2021).
- Hubanks, P.; Platnick, S.; King, M.; Ridgway, B. MODIS atmosphere L3 gridded product Algorithm Theoretical Basis Document (ATBD) & Users Guide 2020. Available online: https://atmosphere-imager.gsfc.nasa.gov/sites/default/files/ModAtmo/documents/L3_ATBD_C6_C61_2020_08_06.pdf (accessed on 2 December 2021).
- Yamamoto, Y.; Ishikawa, H.; Oku, Y.; Hu, Z. An algorithm for land surface temperature retrieval using three thermal infrared bands of Himawari-8. J. Meteorol. Soc. Jpn. 2018, 96B, 56–79. [Google Scholar] [CrossRef] [Green Version]
- Minnis, P.; Kirk Ayers, J.; Palikonda, R.; Phan, D. Contrails, cirrus trends, and climate. J. Clim. 2004, 17, 1671–1685. [Google Scholar] [CrossRef] [Green Version]




Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lagrosas, N.; Xiafukaiti, A.; Kuze, H.; Shiina, T. Assessment of Nighttime Cloud Cover Products from MODIS and Himawari-8 Data with Ground-Based Camera Observations. Remote Sens. 2022, 14, 960. https://doi.org/10.3390/rs14040960
Lagrosas N, Xiafukaiti A, Kuze H, Shiina T. Assessment of Nighttime Cloud Cover Products from MODIS and Himawari-8 Data with Ground-Based Camera Observations. Remote Sensing. 2022; 14(4):960. https://doi.org/10.3390/rs14040960
Chicago/Turabian StyleLagrosas, Nofel, Alifu Xiafukaiti, Hiroaki Kuze, and Tatsuo Shiina. 2022. "Assessment of Nighttime Cloud Cover Products from MODIS and Himawari-8 Data with Ground-Based Camera Observations" Remote Sensing 14, no. 4: 960. https://doi.org/10.3390/rs14040960
APA StyleLagrosas, N., Xiafukaiti, A., Kuze, H., & Shiina, T. (2022). Assessment of Nighttime Cloud Cover Products from MODIS and Himawari-8 Data with Ground-Based Camera Observations. Remote Sensing, 14(4), 960. https://doi.org/10.3390/rs14040960