
Compact Midwave Imaging System: Results from an Airborne Demonstration

 , ,
, ,
Abstract
:
1. Introduction
2. Materials and Methods
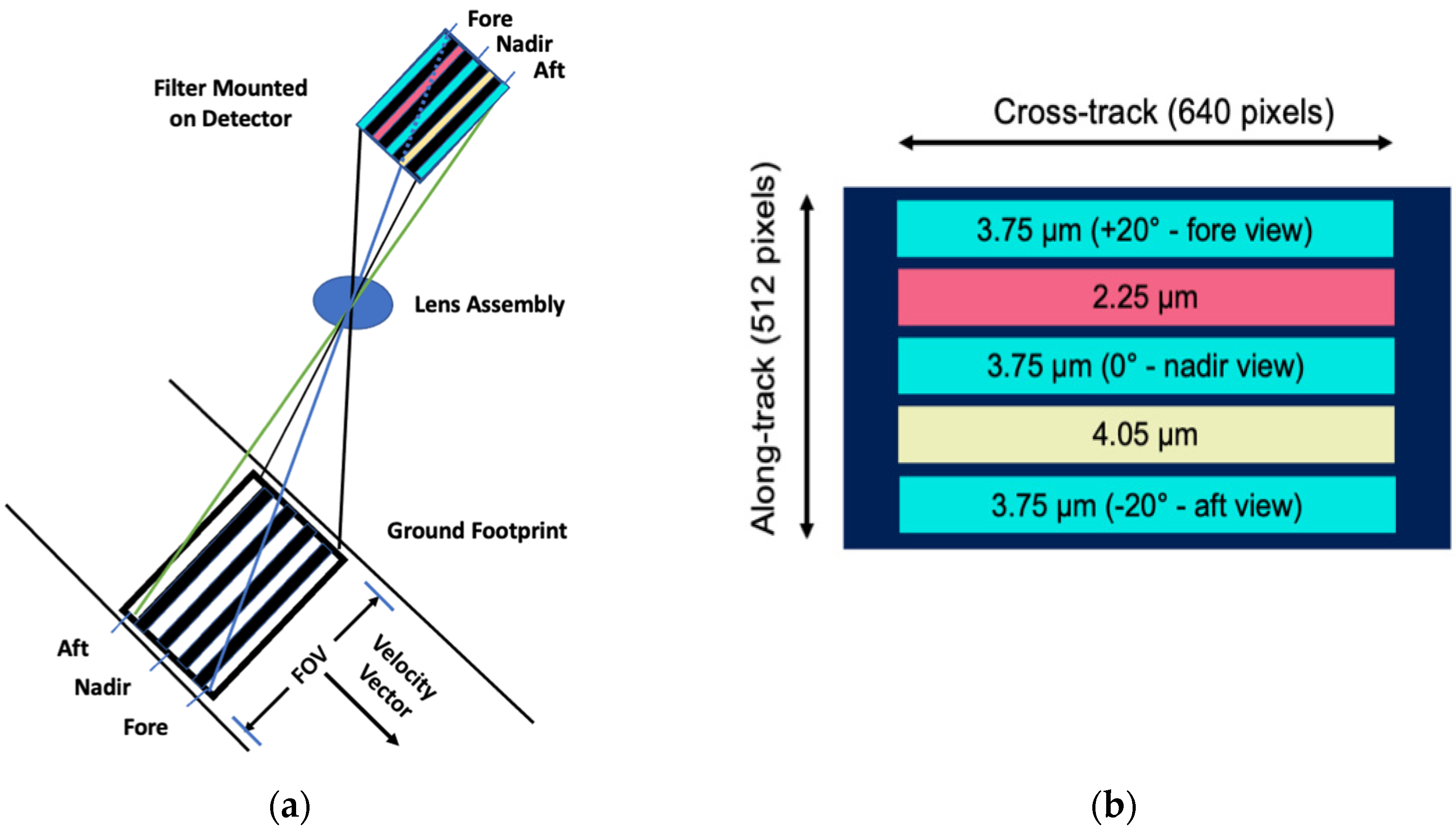
2.1. Instrument
2.1.1. Focal Plane Array (FPA)
2.1.2. Optics
2.1.3. Cryo System
2.1.4. Dewar
2.1.5. Radiometric Calibration Mechanism
2.1.6. Electronics
2.2. Flight Collections
2.3. Geolocation
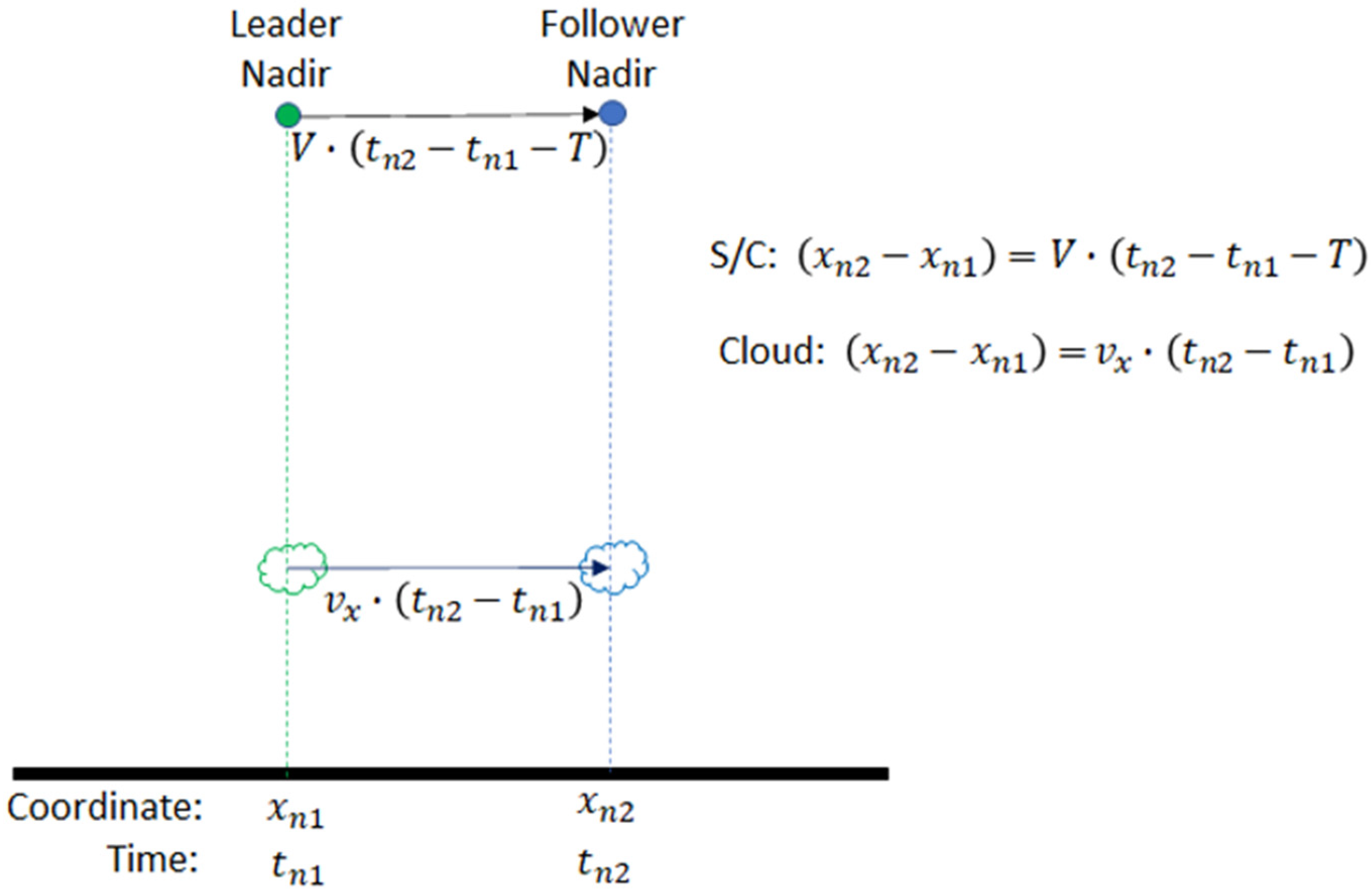
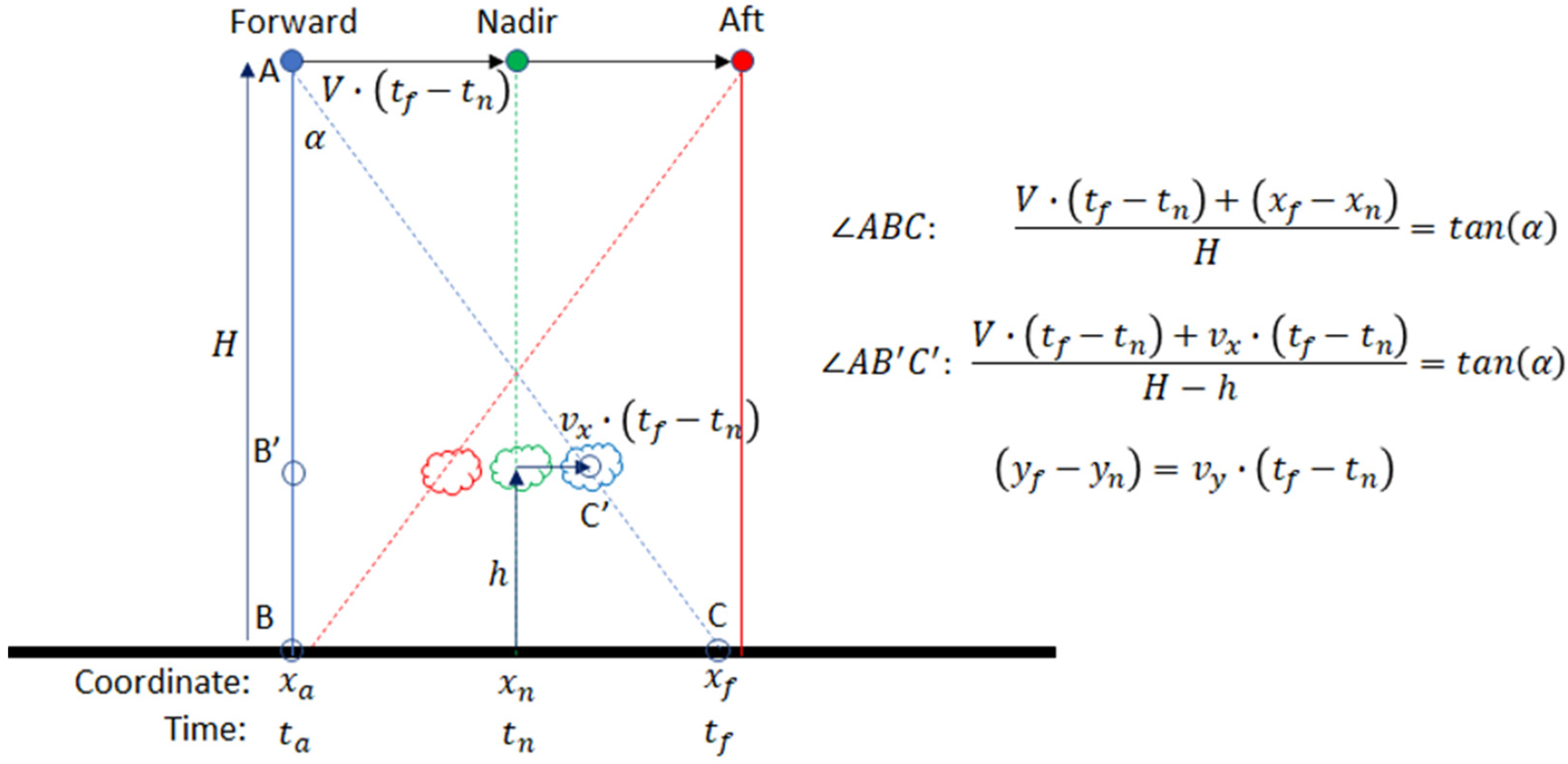
2.4. Stereo Technique
3. Results
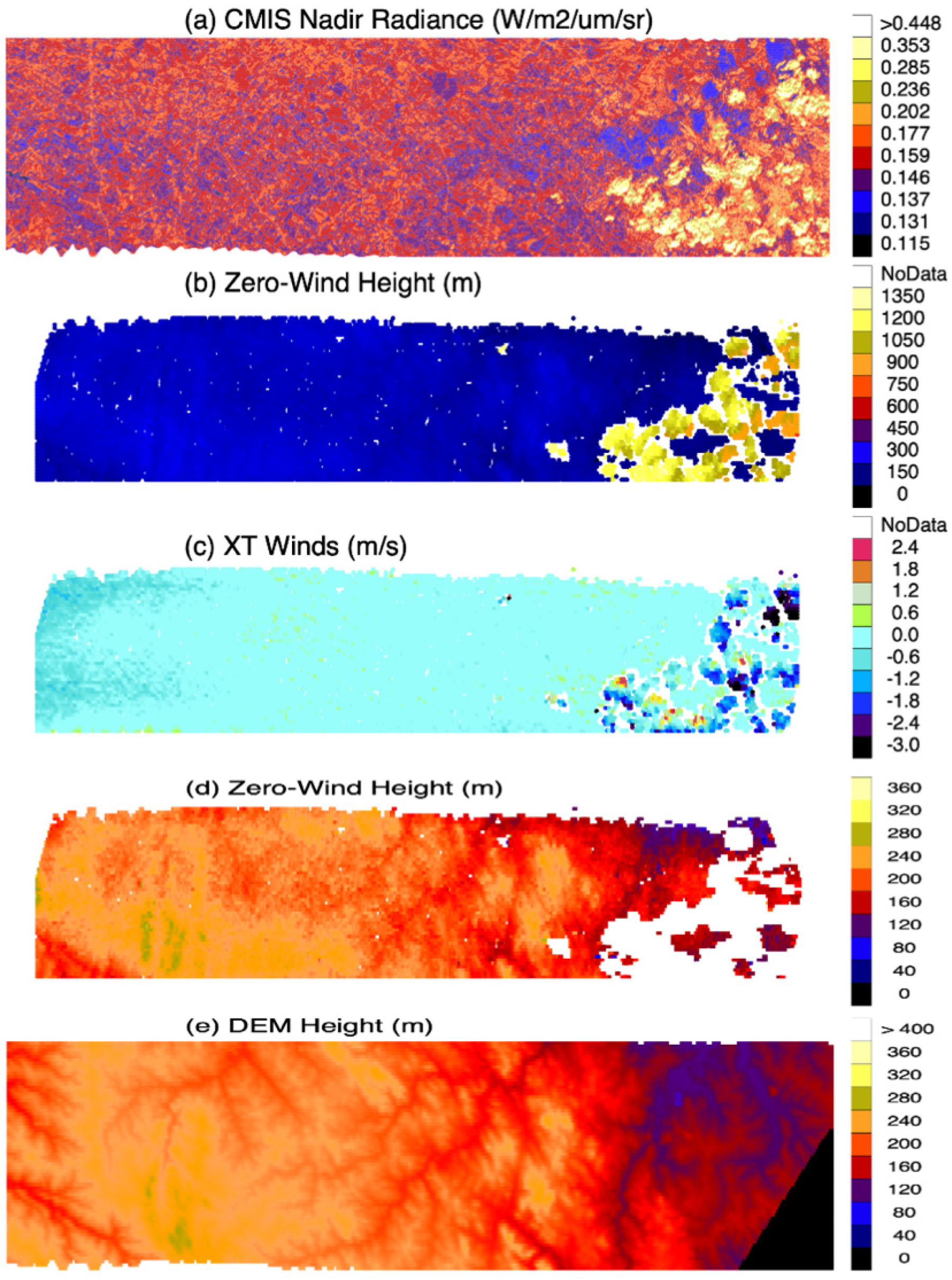
3.1. Imagery
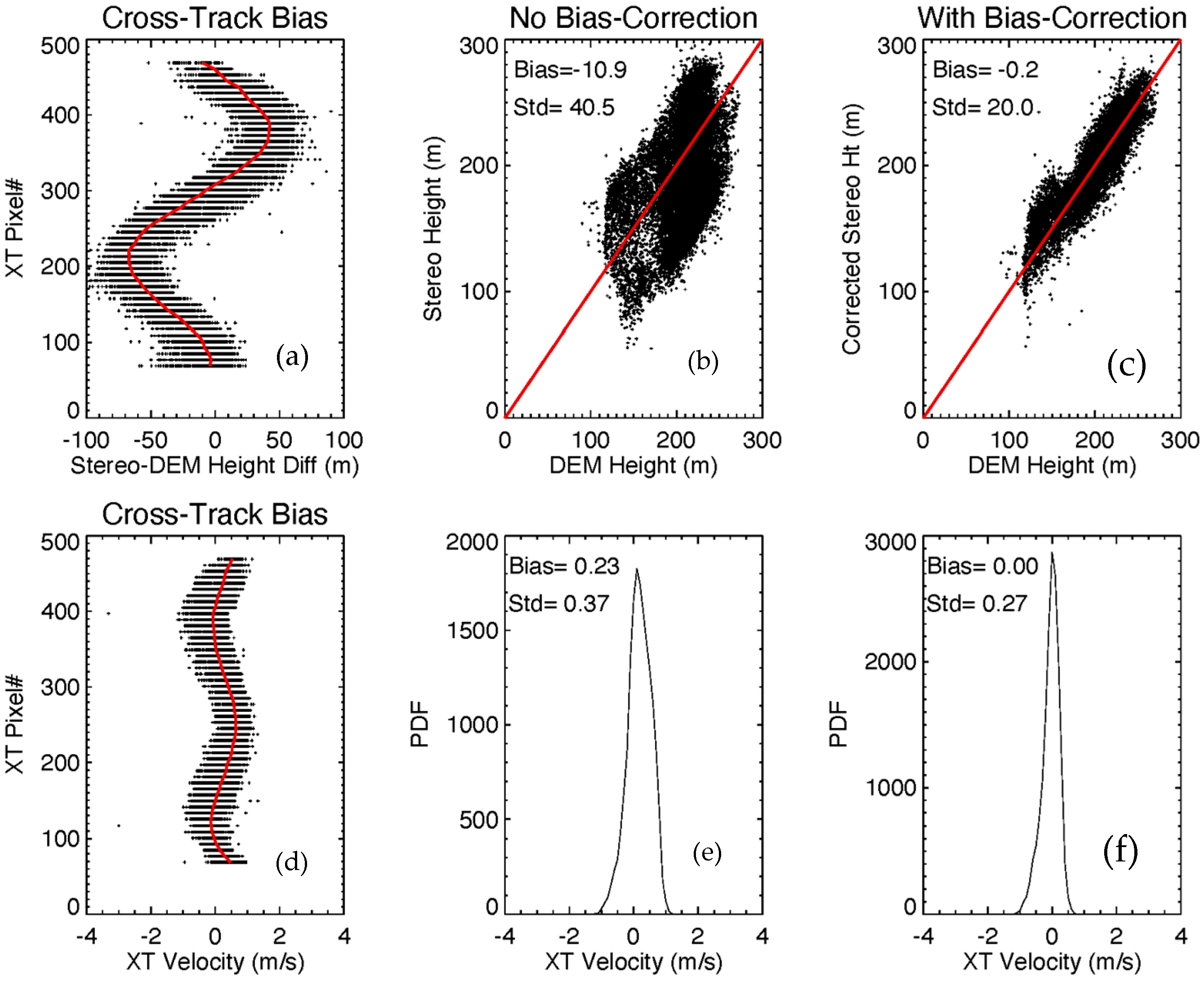
3.2. Ground Point Validation
3.3. CALIPSO Under-Flight
3.4. Aeolus Under-Flight
4. Discussion
4.1. Implications for Notional Spaceflight
4.1.1. Accuracy
4.1.2. Accommodation
4.2. Complement to Active 3D Winds
4.3. Planetary Boundary Layer
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Santek, D.; Dworak, R.; Nebuda, S.; Wanzong, S.; Borde, R.; Genkova, I.; García-Pereda, J.; Galante Negri, R.; Carranza, M.; Nonaka, K.; et al. 2018 Atmospheric Motion Vector (AMV) Intercomparison Study. Remote Sens. 2019, 11, 2240. [Google Scholar] [CrossRef] [Green Version]
- National Academies of Sciences, Engineering, and Medicine. Thriving on Our Changing Planet: A Decadal Strategy for Earth Observation from Space; The National Academies Press: Washington, DC, USA, 2018; p. 717. [Google Scholar] [CrossRef]
- Zeng, X.; Ackerman, S.; Ferraro, R.D.; Lee, T.J.; Murray, J.J.; Pawson, S.; Reynolds, C.; Teixeira, J. Challenges and opportunities in NASA weather research. Bull. Am. Met. Soc. 2016, 97, ES137–ES140. [Google Scholar] [CrossRef]
- Carr, J.L.; Wu, D.L.; Kelly, M.A.; Gong, J. MISR-GOES 3D Winds: Implications for Future LEO-GEO and LEO-LEO Winds. Remote Sens. 2018, 10, 1885. [Google Scholar] [CrossRef] [Green Version]
- Maxwell, M.S. The sequential imaging radiometer (SFIR): A new instrument configuration for earth observations. IEEE Trans. Geosci. Remote Sens. 1988, 26, 82–88. [Google Scholar] [CrossRef]
- Wertz, J.R.; Larson, W.J. (Eds.) Space Mission Analysis and Design, 3rd ed.; Microcosm: Hawthorne, CA, USA, 2010; p. 135. [Google Scholar]
- Liu, Q.; Ignatov, A.; Weng, F. Removing solar radiative effect from VIIRS M12 Band at 3.7 μm for daytime sea surface temperature retrievals. J. Atmos. Ocean. Tech. 2014, 31, 2522–2529. [Google Scholar] [CrossRef]
- Carr, J.L.; Wu, D.L.; Daniels, J.; Friberg, M.D.; Bresky, W.; Madani, H. GEO–GEO Stereo-Tracking of Atmospheric Motion Vectors (AMVs) from the Geostationary Ring. Remote Sens. 2020, 12, 3779. [Google Scholar] [CrossRef]
- Mueller, K.J.; Wu, D.; Horváth, L.; Jovanovic, Á.; Muller, V.M.; Di Girolamo, J.P.; Garay, M.J.; Diner, D.J.; Moroney, C.M.; Wanzong, S. Assessment of MISR Cloud Motion Vectors (CMVs) Relative to GOES and MODIS Atmospheric Motion Vectors (AMVs). J. Appl. Met. Clim. 2017, 56, 555–572. [Google Scholar] [CrossRef] [Green Version]
- Weisz, E.; Li, J.; Menzel, W.P.; Heidinger, A.K.; Kahn, B.H.; Liu, C.-Y. Comparison of AIRS, MODIS, CloudSat and CALIPSO cloud top height retrievals. Geophys. Res. Lett. 2007, 34, L17811. [Google Scholar] [CrossRef]
- Carr, J.L.; Wilson, C.; Wu, D.; French, M.; Kelly, M. An innovative spacecube application for atmospheric science. In Proceedings of the 2020 IEEE International Geoscience and Remote Sensing Symposium, Waikoloa, HI, USA, 26 September–2 October 2020; pp. 3853–3856. [Google Scholar] [CrossRef]
- Witchas, B.; Lemmerz, C.; Geiß, A.; Lux, O.; Marksteiner, U.; Rahm, S.; Reitebuch, O.; Weiler, F. First validation of Aeolus wind observation by airborne Doppler wind lidar measurements. Atmos. Meas. Tech. 2020, 13, 2381–2396. [Google Scholar] [CrossRef]
- Holtslag, A.A.M.; Nieuwstadt, F.T.M. Scaling the atmospheric boundary layer. Bound.-Layer Meteor. 1986, 36, 201–209. [Google Scholar] [CrossRef]
- Seibert, P.; Beyrich, F.; Gryning, S.E.; Joffre, S.; Rasmussen, A.; Tercier, P. Review and intercomparison of operational methods for the determination of the mixing height. Atmos. Environ. 2000, 34, 1001–1027. [Google Scholar] [CrossRef]
- Stevens, B. Entrainment in stratocumulus topped mixed layers. Q. J. R. Meteor. Soc. 2002, 128, 2663–2689. [Google Scholar] [CrossRef]
- Lin, J.-T.; Youn, D.; Liang, X.-Z.; Wuebbles, D.J. Global model simulation of summertime U.S. ozone diurnal cycle and its sensitivity to PBL mixing, spatial resolution, and emissions. Atmos. Environ. 2008, 42, 8470–8483. [Google Scholar] [CrossRef]
- Konor, C.S.; Boezio, G.C.; Mechoso, C.R.; Arakawa, A. Parameterization of PBL processes in an atmospheric general circulation model: Description and preliminary assessment. Mon. Weather Rev. 2009, 137, 1061–1082. [Google Scholar] [CrossRef] [Green Version]
- Wood, R.; Bretherton, C.S. Boundary layer depth, entrainment and decoupling in the cloud-capped subtropical and tropical marine boundary layer. J. Clim. 2004, 17, 3575–3587. [Google Scholar] [CrossRef] [Green Version]
- Zuidema, P.; Painemal, D.; de Szoeke, S.; Fairall, C. Stratocumulus cloud-top height estimates and their climatic implications. J. Clim. 2009, 22, 4652–4666. [Google Scholar] [CrossRef] [Green Version]
- Kollias, P.; Albrecht, B. The Turbulence Structure in a Continental Stratocumulus Cloud from Millimeter-Wavelength Radar Observations. J. Atmos. Sci. 2000, 57, 2417–2434. [Google Scholar] [CrossRef]
- Intrieri, J.M.; Shupe, M.D.; Uttal, T.; McCarty, B.J. An annual cycle of Arctic cloud characteristics observed by radar and lidar at SHEBA. J. Geophys. Res. 2002, 107, 8030. [Google Scholar] [CrossRef]
- Karlsson, J.; Svensson, G.; Cardoso, S.; Teixeira, J.; Paradise, S. Subtropical cloud-regime transitions. Boundary-layer depth and cloud-top height evolution in models and observations. J. Appl. Met. Clim. 2010, 49, 1845–1858. [Google Scholar] [CrossRef]
- Kay, J.E.; L’Ecuyer, T.; Gettelman, A.; Stephens, G.; O’Dell, C. The contribution of cloud and radiation anomalies to the 2007 Arctic sea ice extent minimum. Geophys. Res. Lett. 2008, 35, L08503. [Google Scholar] [CrossRef] [Green Version]
- Wu, D.L.; Lee, J.N. Arctic Low Cloud Changes as Observed by MISR and CALIOP: Implication for the enhanced autumnal warming and sea ice loss. J. Geophys. Res. 2012, 117, D07107. [Google Scholar] [CrossRef] [Green Version]
- Carr, J.L.; Wu, D.L.; Wolfe, R.E.; Madani, H.; Lin, G.; Tan, B. Joint 3D-Wind Retrievals with Stereoscopic Views from MODIS and GOES. Remote Sens. 2019, 11, 2100. [Google Scholar] [CrossRef] [Green Version]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| CMIS | VIIRS * | MODIS ** | MISR ^ | ASTER ^^ | |
|---|---|---|---|---|---|
| Orbit | 410 km ISS orbit | 830 km Sun synch | 705 km Sun synch | 705 km Sun synch | 705 km Sun synch |
| GSD | 545 m | 375 m 750 m | 1000 m | 275 m 1000 m | 10 m, 30 m, 90 m |
| Detector | T2SL | HgCdTe | HgCdTe | CCD | CCD/PtSi-S/ HgCdTe |
| NEdT 3.75 µm at 300 K | 0.05 K | 0.1 K | 0.05 K | N/A | N/A |
| Optics | Body mounted | Scanning | Scanning | Body mounted | Telescope rotation/ pointing/ scanning mirrors |
| Cooling | 150 K | 80 K | 80 K | 278 K | 80 K SWIR and LWIR |
| Observation | Day/Night | Day/Night | Day/Night | Day | Day/Night |
| Parameter | Requirement | |
|---|---|---|
| Payload accommodation | Mass | 3 kg |
| Size | Optical Unit: 20 × 10 × 10 cm Electronics: 9 × 9 × 9 cm | |
| Power | 20 W peak for initial cool-down 8 W average | |
| Position/attitude | Position knowledge | 4 m |
| Pointing accuracy | ±0.005° | |
| Pointing stability | 36 arc-s/1-s | |
| Data | Data transfer rate | 600 kbps |
| Data storage | 10.4 GBits | |
| Data downlink | 5.2 Gbits/day |
| Criteria | Requirement |
|---|---|
| Multi-spectral SWIR/MWIR | 2.25, 3.75, 4.05 µm |
| Field of view | ≥40° |
| Ground sample distance | ≤1 km |
| Distortion | <10°, software-correctable |
| Multi-angle | ≥20° |
| Sensitivity | NEdT ≤ 1 K at 270 K, 230 K for 3.75, 4.05 µm |
| SNR > 100 for 2.25 µm | |
| Size, weight, and power | 6-U CubeSat compatible |
| Aircraft | Satellite | |
|---|---|---|
| Altitude | 13.85 km | 410 km |
| Velocity | 246 m/s | 7.7 km/s |
| Swath length | 9.5 km | 311.1 km |
| Measurement spacing | 38.1 s | 40.4 s |
| Equation (8) | 0.36 m/s | 20.5 m |
| Covariance Model (mean) | 0.37 m/s | 20.7 m |
| Altitude (km) | 100 | 400 | 550 | 800 | 915 | 1130 |
|---|---|---|---|---|---|---|
| Cross-track FOV (°) | 50 | 50 | 50 | 50 | 50 | 50 |
| Cross-track pixels | 640 | 640 | 640 | 640 | 640 | 640 |
| Swath width (km) | 93 | 376 | 518 | 757 | 868 | 1076 |
| GSD nadir (m) | 136 | 545 | 750 | 1091 | 1248 | 1541 |
| GSD edge (m) | 167 | 678 | 940 | 1386 | 1596 | 1997 |
| Measurement spacing (s) | 9.3 | 40.4 | 57.5 | 88.6 | 103.9 | 134.4 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kelly, M.A.; Carr, J.L.; Wu, D.L.; Goldberg, A.C.; Papusha, I.; Meinhold, R.T. Compact Midwave Imaging System: Results from an Airborne Demonstration. Remote Sens. 2022, 14, 834. https://doi.org/10.3390/rs14040834
Kelly MA, Carr JL, Wu DL, Goldberg AC, Papusha I, Meinhold RT. Compact Midwave Imaging System: Results from an Airborne Demonstration. Remote Sensing. 2022; 14(4):834. https://doi.org/10.3390/rs14040834
Chicago/Turabian StyleKelly, Michael A., James L. Carr, Dong L. Wu, Arnold C. Goldberg, Ivan Papusha, and Renee T. Meinhold. 2022. "Compact Midwave Imaging System: Results from an Airborne Demonstration" Remote Sensing 14, no. 4: 834. https://doi.org/10.3390/rs14040834
APA StyleKelly, M. A., Carr, J. L., Wu, D. L., Goldberg, A. C., Papusha, I., & Meinhold, R. T. (2022). Compact Midwave Imaging System: Results from an Airborne Demonstration. Remote Sensing, 14(4), 834. https://doi.org/10.3390/rs14040834