
Multivehicle 3D Cooperative Positioning Algorithm Based on Information Geometric Probability Fusion of GNSS/Wireless Station Navigation



Abstract
1. Introduction
- The first innovation is to introduce the idea of information geometry into multisource fusion. Aiming at the inconsistency of the time and frequency of the output navigation information, we convert the two types of navigation source information into an information geometric probability model to unify the time and frequency of the navigation information for large-scale vehicles under the internet of vehicles. The unification of positioning information parameters can effectively reduce the complexity of the algorithm, enhance the scalability of the fusion algorithm, and successfully solve the problem of vehicle plug-and-play under the internet of vehicles.
- The second innovation is to introduce the idea of multisource fusion into cooperative positioning, and transform cooperative positioning into multisource fusion in different spatial distributions by taking nodes as sources. Aiming at the problem that the information geometric probability model is two-dimensional and cannot be directly fused and positioned in three-dimensional space, we propose a three-dimensional KLA navigation information fusion method based on the ranging information of the vehicle network. The method uses relative entropy theory to measure the difference in the probability of navigation distribution information among multiple vehicles in the vehicle network and rapidly fuses navigation information under the minimum difference criterion. This method can ensure the real-time performance of multivehicle positioning and effectively suppress the sudden error.
- We construct a physical verification platform for multivehicle cooperative positioning and verify the performance comparison between the MVCP-GW algorithm and the current main algorithms through simulations of accuracy stability, applicability, and obstruction scenarios. The results show that the MVCP-GW algorithm has high accuracy, strong robustness, and a wide application range. When satellite navigation or wireless navigation signals are lost or abruptly changed, the MVCP-GW algorithm can adequately suppress the impact of errors. In addition, compared with other distributed cooperative positioning algorithms, the MVCP-GW algorithm has the fastest convergence speed of more than 40%.
2. Related Work
3. System Model
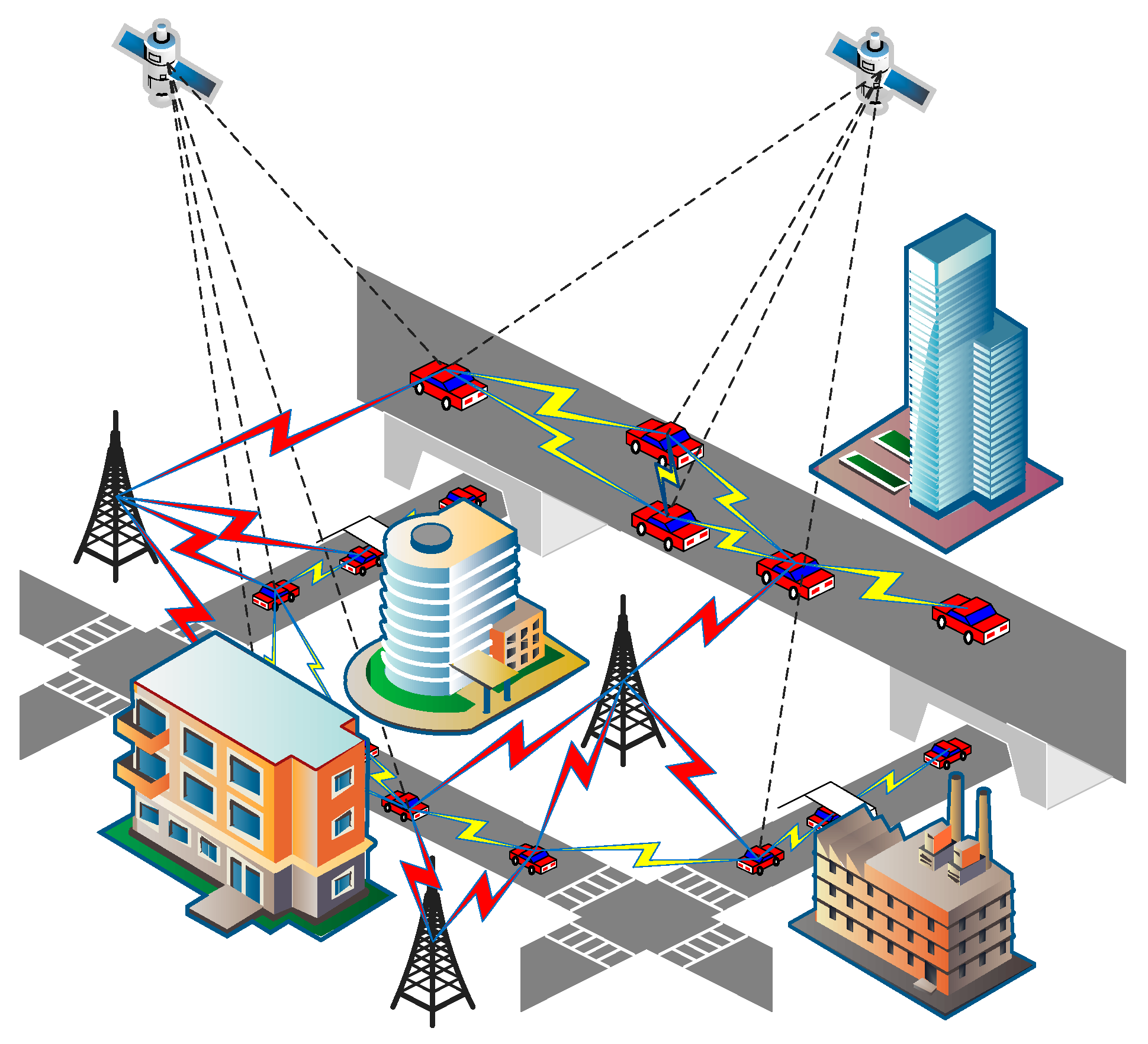
3.1. Diagram of Multivehicle 3D Cooperative Positioning Scene
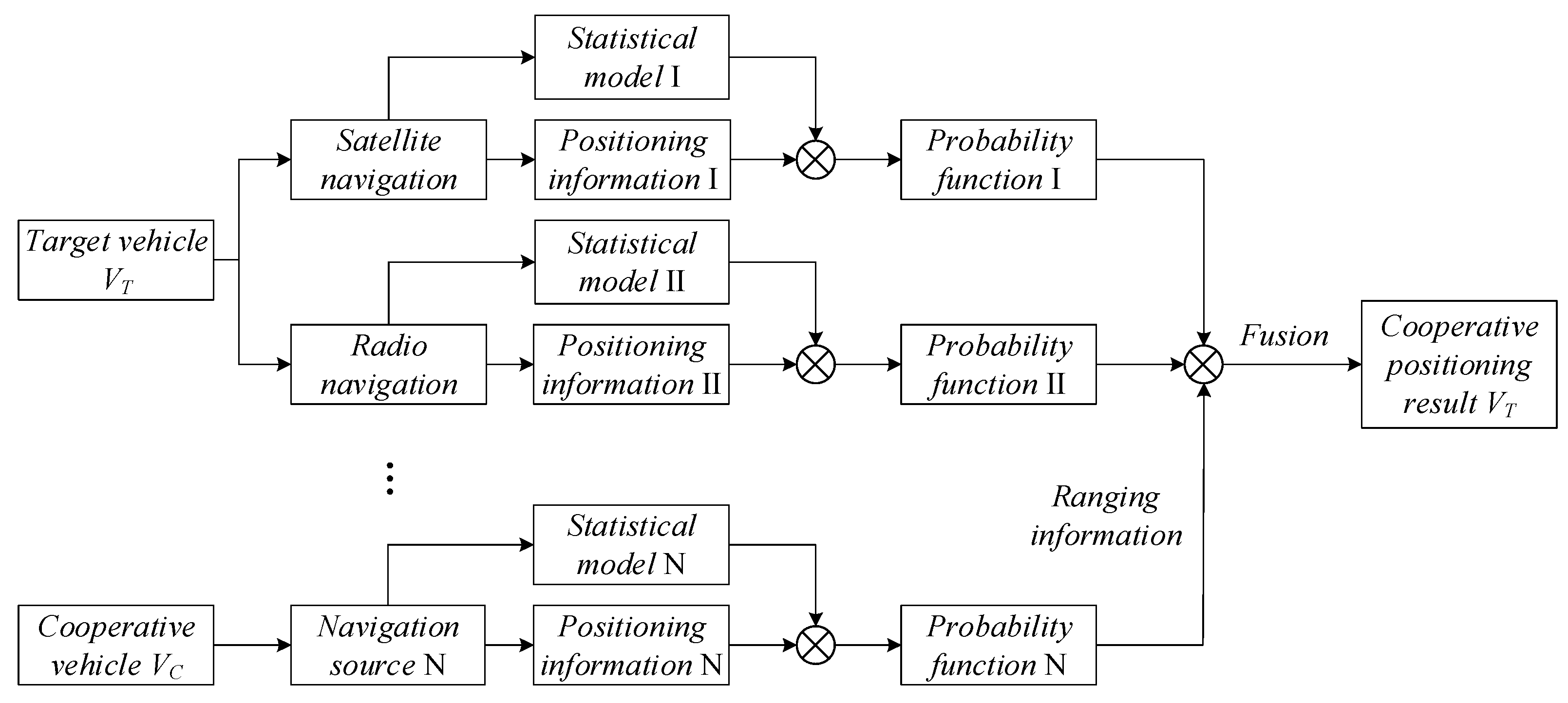
3.2. Fusion Architecture Based on Information Geometric Probability
4. KLA Information Geometry Fusion Method
4.1. Three-Dimensional Geometric Probability Model of Positioning Information
4.2. KLA Information Fusion Algorithm
- (1)
- Step 1
- (2)
- Step 2
- (3)
- Step 3
5. Simulation Results and Analysis
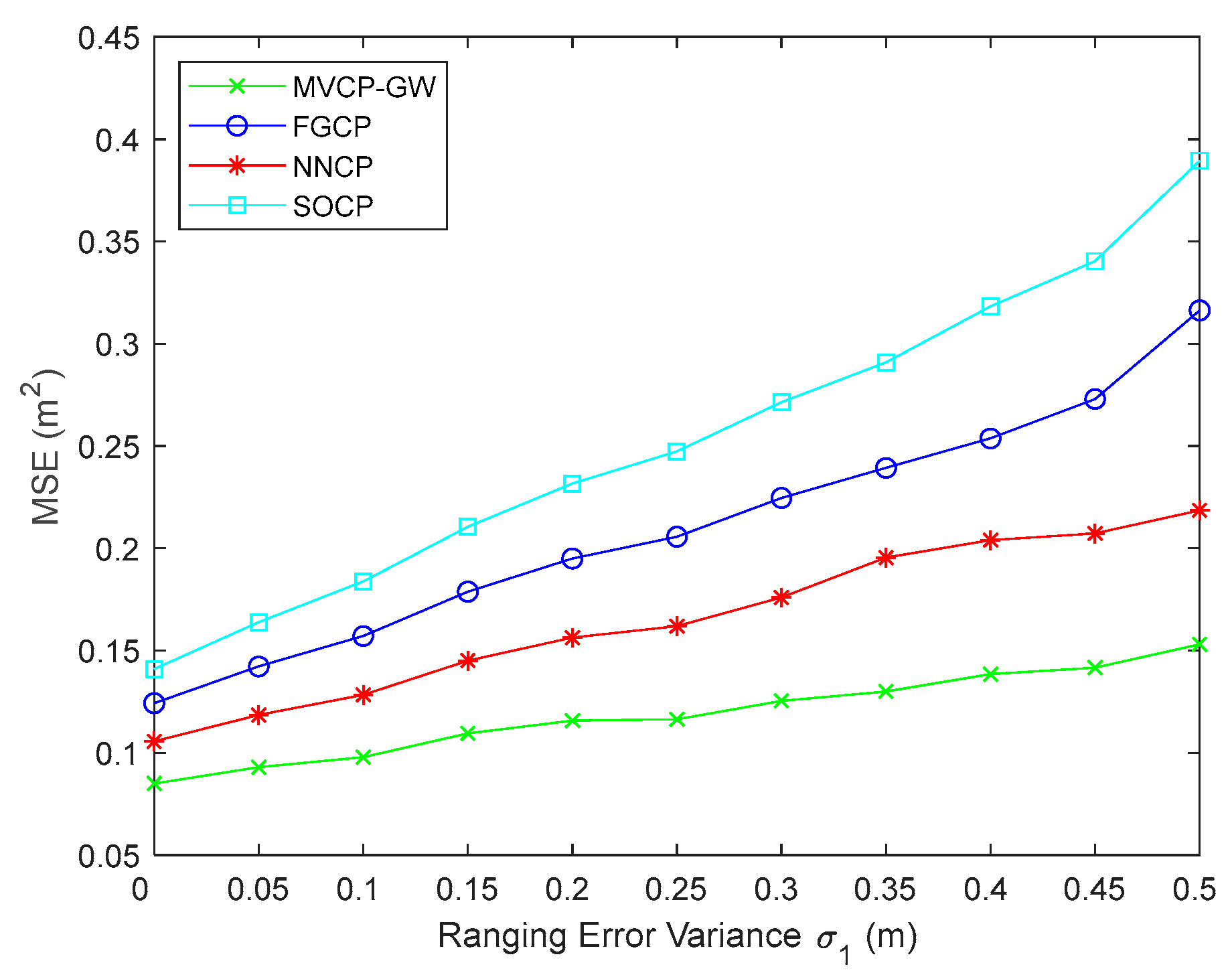
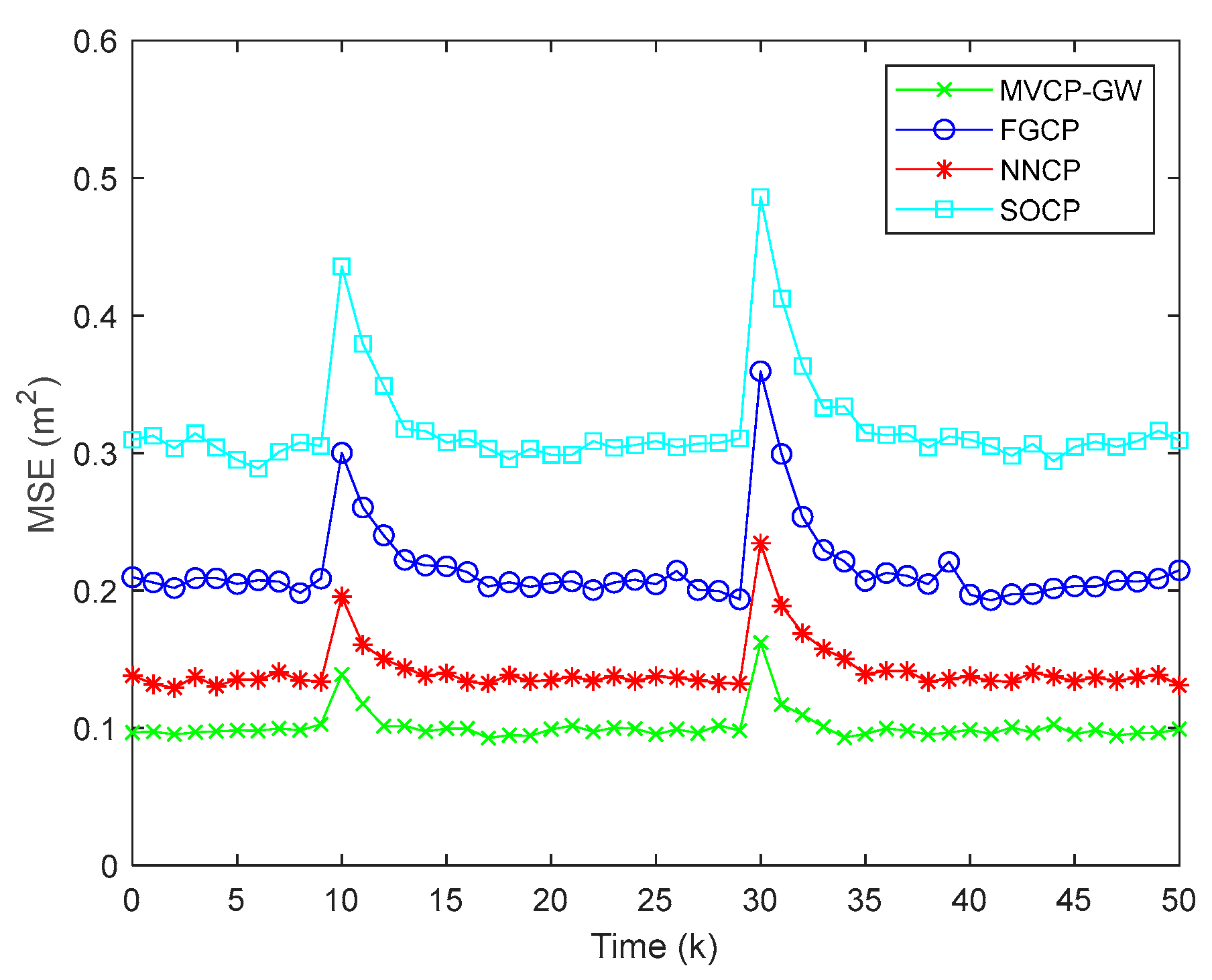
5.1. Simulation Analysis of Positioning Accuracy and Stability
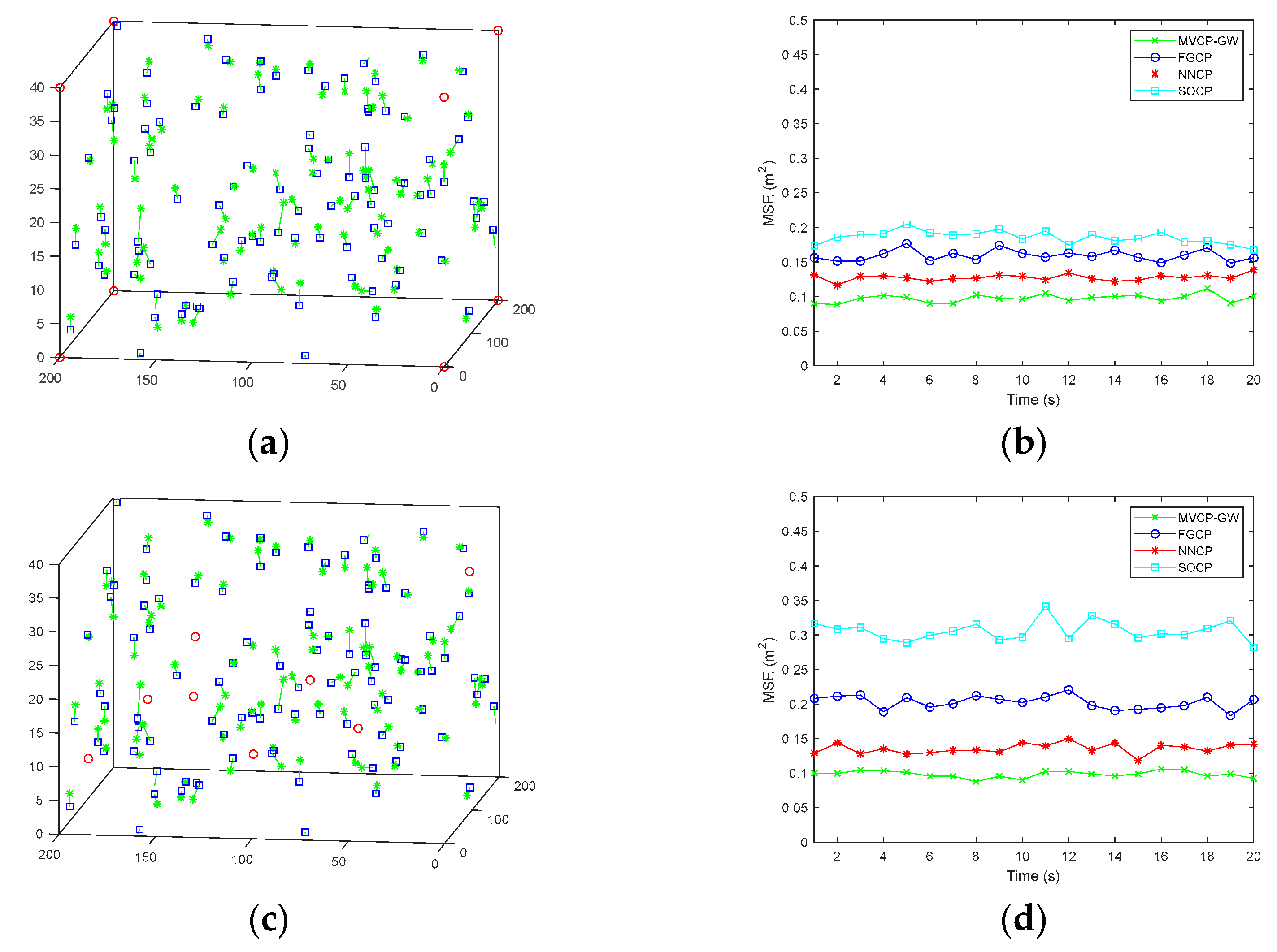
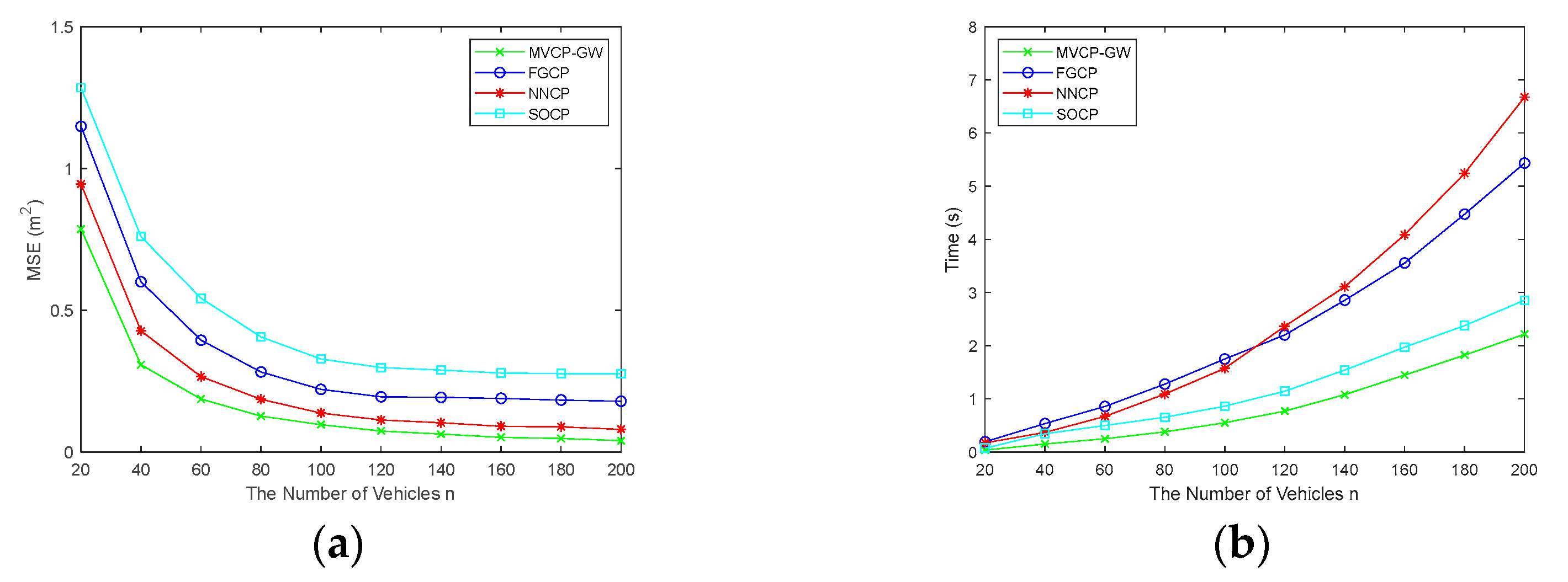
5.2. Simulation Analysis of Algorithm Applicability
5.3. Simulation Analysis of Positioning in Obstruction Scenarios
5.4. Summary of Simulation Results
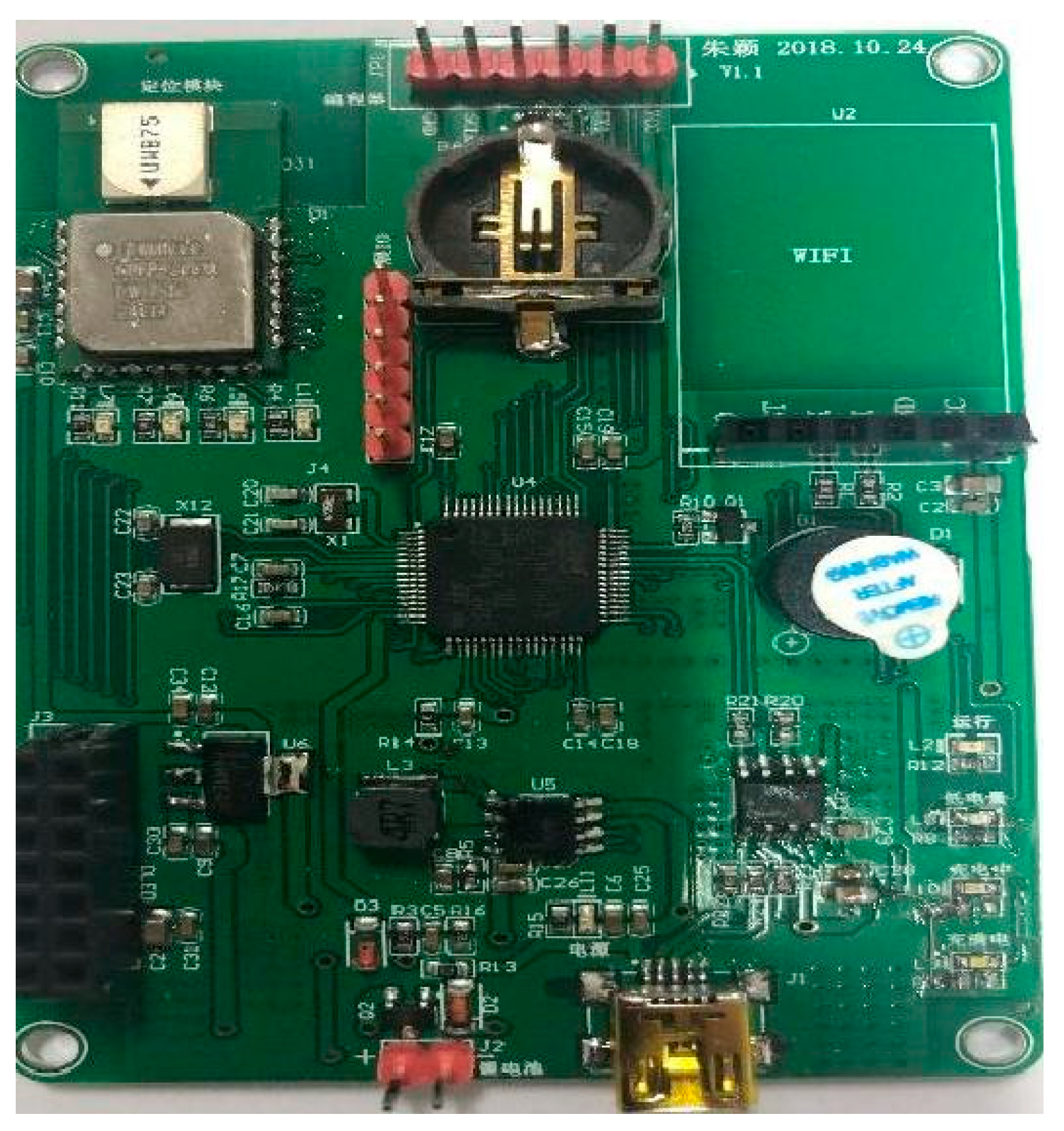
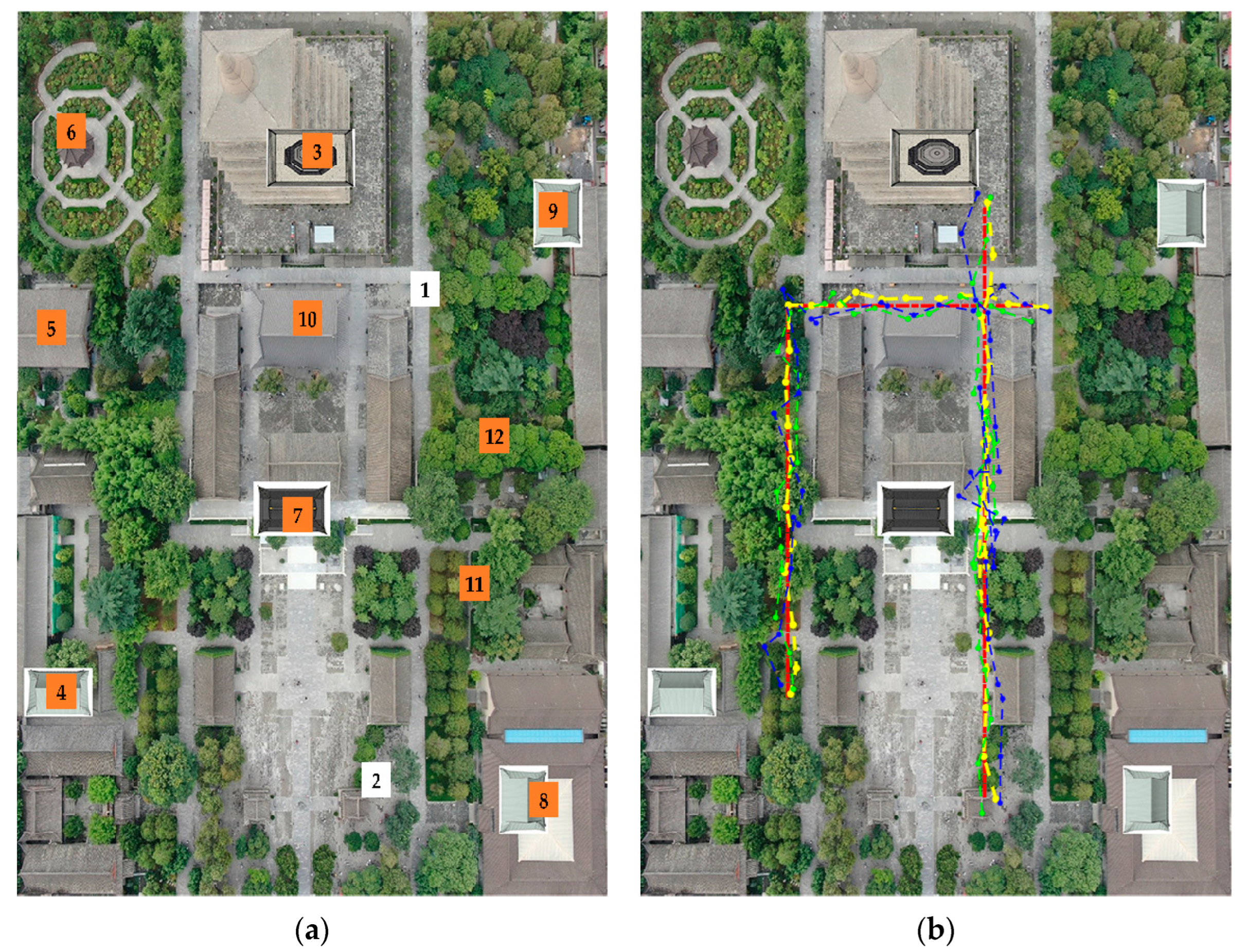
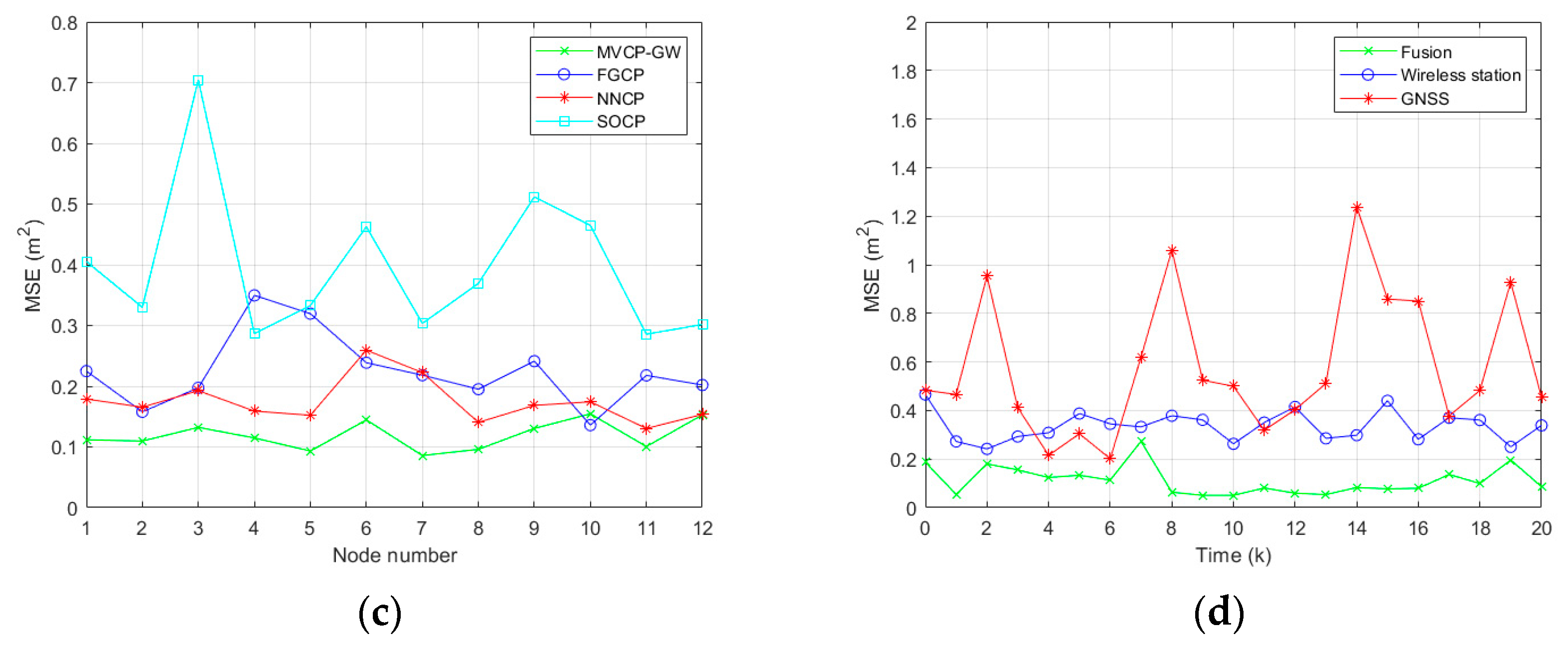
6. Physical Verification Platform Testing
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Ling, Y.; Chu, X.; Lu, Z.; Wang, L.; Wen, X. PCM: A Positioning Calibration Mechanism for Connected Autonomous Vehicles. IEEE Access 2020, 8, 95046–95056. [Google Scholar] [CrossRef]
- Chowdhury, A.; Karmakar, G.; Kamruzzaman, J.; Islam, S. Trustworthiness of self-driving vehicles for intelligent transportation systems in industry applications. IEEE Trans. Ind. Inf. 2020, 17, 961–970. [Google Scholar] [CrossRef]
- Watta, P.; Zhang, X.; Murphey, Y.L. Vehicle position and context detection using V2V communication. IEEE Trans. Intell. Veh. 2020, 6, 634–648. [Google Scholar] [CrossRef]
- Zhou, S.; Cheng, G.; Meng, Q.; Lin, H.; Du, Z.; Wang, F. Development of multi-sensor information fusion and AGV navigation system. In Proceedings of the 2020 IEEE 4th Information Technology, Networking, Electronic and Automation Control Conference (ITNEC), Chongqing, China, 12–14 June 2020; pp. 2043–2046. [Google Scholar] [CrossRef]
- Shu, Y.; Xu, P.; Niu, X.; Chen, Q.; Qiao, L.; Liu, J. High-Rate Attitude Determination of Moving Vehicles With GNSS: GPS, BDS, GLONASS, and Galileo. IEEE Trans. Instrum. Meas. 2022, 71, 5501813. [Google Scholar] [CrossRef]
- Klein, I.; Lipman, Y.; Vaknin, E. Squeezing Position Updates For Enhanced Estimation of Land Vehicles Aided INS. IEEE Sens. J. 2020, 20, 9385–9393. [Google Scholar] [CrossRef]
- Zhang, J.; Zhang, Y.; Shen, M.; Zhang, D. WAVE-Based Vehicle Localization With Fuzzy Filter for Autopilot in a Free-Flow Toll Station. IEEE Trans. Ind. Inf. 2020, 17, 3940–3949. [Google Scholar] [CrossRef]
- Du, L.; Sun, Q.; Bai, J.; Wang, J. A Verification Method for Traffic Radar-Based Speed Meter With Target Position Determination in Road Vehicle Speeding Enforcement. IEEE Trans. Veh. Technol. 2021, 70, 12374–12388. [Google Scholar] [CrossRef]
- Wang, Z.; Fang, J.; Dai, X.; Zhang, H.; Vlacic, L. Intelligent vehicle self-localization based on double-layer features and multilayer LIDAR. IEEE Trans. Intell. Veh. 2020, 5, 616–625. [Google Scholar] [CrossRef]
- Chu, X.; Lu, Z.; Gesbert, D.; Wang, L.; Wen, X. Vehicle localization via cooperative channel mapping. IEEE Trans. Veh. Technol. 2021, 70, 5719–5733. [Google Scholar] [CrossRef]
- Kim, H.; Granström, K.; Gao, L.; Battistelli, G.; Kim, S.; Wymeersch, H. 5G mmWave cooperative positioning and mapping using multi-model PHD filter and map fusion. IEEE Trans. Wireless Commun. 2020, 19, 3782–3795. [Google Scholar] [CrossRef]
- Perfecto, C.; Del Ser, J.; Bennis, M. Millimeter-wave V2V communications: Distributed association and beam alignment. IEEE J. Sel. Areas Commun. 2017, 35, 2148–2162. [Google Scholar] [CrossRef]
- Zhang, Y.; Song, B.; Du, X.; Guizani, M. Vehicle tracking using surveillance with multimodal data fusion. IEEE Trans. Intell. Transp. Syst. 2018, 19, 2353–2361. [Google Scholar] [CrossRef]
- Wang, D.; Dong, Y.; Li, Z.; Li, Q.; Wu, J. Constrained MEMS-based GNSS/INS tightly coupled system with robust Kalman filter for accurate land vehicular navigation. IEEE Trans. Instrum. Meas. 2019, 69, 5138–5148. [Google Scholar] [CrossRef]
- Wen, W.; Bai, X.; Zhang, G.; Chen, S.; Yuan, F.; Hsu, L. Multi-Agent Collaborative GNSS/Camera/INS Integration Aided by Inter-Ranging for Vehicular Navigation in Urban Areas. IEEE Access 2020, 8, 124323–124338. [Google Scholar] [CrossRef]
- Huang, Z.; Lv, C.; Xing, Y.; Wu, J. Multi-modal sensor fusion-based deep neural network for end-to-end autonomous driving with scene understanding. IEEE Sens. J. 2020, 21, 11781–11790. [Google Scholar] [CrossRef]
- Tang, C.; Wang, Y.; Zhang, L.; Zhang, Y.; Song, H. Multisource Fusion UAV Cluster Cooperative Positioning Using Information Geometry. Remote Sens. 2022, 14, 5491. [Google Scholar] [CrossRef]
- Wang, G.; Chong, P.H.J.; Seet, B.C. The Vehicle Trajectory Estimation Method Based on the Information Fusion. In Proceedings of the 2018 IEEE 4th Information Technology and Mechatronics Engineering Conference (ITOEC), Chongqing, China, 14–16 December 2018; pp. 1271–1274. [Google Scholar] [CrossRef]
- Wang, W.; Sun, H.; Jin, Y.; Fu, M.; Li, K.; Zhang, W.A. Low-speed Unmanned Vehicle Localization Based on Sensor Fusion of Low-cost Stereo Camera and IMU. In Proceedings of the 2021 5th CAA International Conference on Vehicular Control and Intelligence (CVCI), Tianjin, China, 29–31 October 2021. [Google Scholar] [CrossRef]
- Shien, C.; Huang, C.; Liu, J.; Chen, X.; Weijinya, U.; Shi, G. Integrated navigation accuracy improvement algorithm based on multi-sensor fusion. In Proceedings of the 2nd IEEE International Conference on Micro/Nano Sensors for Al, Healthcare, and Robotics (NSENS), Shenzhen, China, 31 October–2 November 2019; pp. 54–57. [Google Scholar] [CrossRef]
- Zheng, Z.; Li, X.; Sun, Z.; Song, X. A novel visual measurement framework for land vehicle positioning based on multimodule cascaded deep neural network. IEEE Trans. Ind. Inf. 2020, 17, 2347–2356. [Google Scholar] [CrossRef]
- Tang, C.; Wang, C.; Zhang, L.; Zhang, Y.; Song, H. Geometric-Manifold-Assisted Distributed Navigation Probabilistic Information Fusion Cooperative Positioning Algorithm. Remote Sens. 2021, 13, 4987. [Google Scholar] [CrossRef]
- Wang, F.; Yin, G.; Xu, L.; Zhuang, W.; Liu, Y.; Liang, J. Distance-Based Cooperative Localization of Connected Vehicles Via Convex Relaxation Under Extreme Environments. In Proceedings of the 2021 5th CAA International Conference on Vehicular Control and Intelligence (CVCI), Tianjin, China, 29–31 October 2021. [Google Scholar] [CrossRef]
- Bobo, L.; Venzke, A.; Chatzivasileiadis, S. Second-order cone relaxations of the optimal power flow for active distribution grids: Comparison of methods. Int. J. Electr. Power Energy Syst. 2021, 127, 106625. [Google Scholar] [CrossRef]
- Tang, C.; Zhang, L.; Zhang, Y.; Song, H. Factor graph-assisted distributed cooperative positioning algorithm in the GNSS system. Sensors 2018, 18, 3748. [Google Scholar] [CrossRef]
- Song, Y.; Fu, Y.; Yu, F.R.; Zhou, L. Blockchain-enabled Internet of Vehicles with cooperative positioning: A deep neural network approach. IEEE Internet Things J. 2020, 7, 3485–3498. [Google Scholar] [CrossRef]
- Hua, X.; Ono, Y.; Peng, L.; Cheng, Y.; Wang, H. Target detection within nonhomogeneous clutter via total Bregman divergence-based matrix information geometry detectors. IEEE Trans. Signal Process. 2021, 69, 4326–4340. [Google Scholar] [CrossRef]
- Hua, X.; Ono, Y.; Peng, L.; Xu, Y. Unsupervised Learning Discriminative MIG Detectors in Nonhomogeneous Clutter. IEEE Trans. Commun. 2022, 70, 4107–4120. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | MSE (m2) | Positioning Time (s) |
|---|---|---|
| MVCP-GW | 0.098 | 0.58 |
| SOCP | 0.317 | 0.94 |
| FGCP | 0.215 | 1.84 |
| NNCP | 0.126 | 1.62 |
| Algorithm | MSE Fluctuation (m2) | Reconvergence Time (s) |
|---|---|---|
| MVCP-GW | 0.04 | 0.4 |
| SOCP | 0.13 | 0.6 |
| FGCP | 0.10 | 0.8 |
| NNCP | 0.06 | 0.8 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tang, C.; Wang, C.; Zhang, L.; Zhang, Y.; Song, H. Multivehicle 3D Cooperative Positioning Algorithm Based on Information Geometric Probability Fusion of GNSS/Wireless Station Navigation. Remote Sens. 2022, 14, 6094. https://doi.org/10.3390/rs14236094
Tang C, Wang C, Zhang L, Zhang Y, Song H. Multivehicle 3D Cooperative Positioning Algorithm Based on Information Geometric Probability Fusion of GNSS/Wireless Station Navigation. Remote Sensing. 2022; 14(23):6094. https://doi.org/10.3390/rs14236094
Chicago/Turabian StyleTang, Chengkai, Chen Wang, Lingling Zhang, Yi Zhang, and Houbing Song. 2022. "Multivehicle 3D Cooperative Positioning Algorithm Based on Information Geometric Probability Fusion of GNSS/Wireless Station Navigation" Remote Sensing 14, no. 23: 6094. https://doi.org/10.3390/rs14236094
APA StyleTang, C., Wang, C., Zhang, L., Zhang, Y., & Song, H. (2022). Multivehicle 3D Cooperative Positioning Algorithm Based on Information Geometric Probability Fusion of GNSS/Wireless Station Navigation. Remote Sensing, 14(23), 6094. https://doi.org/10.3390/rs14236094