
Rainfall Forecast Using Machine Learning with High Spatiotemporal Satellite Imagery Every 10 Minutes

 ,
,  ,
,  ,
, 

Abstract
1. Introduction
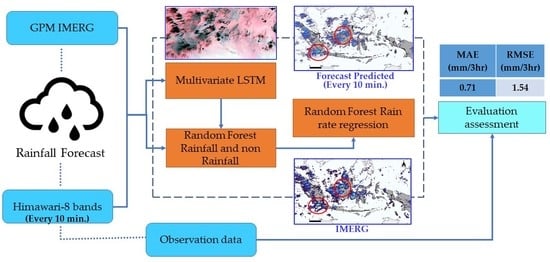
2. Materials and Methods
2.1. Study Area
2.2. Data
2.2.1. Himawari-8
2.2.2. GPM IMERG
2.2.3. Observation Data
2.3. Machine Learning Method
2.3.1. Multivariate LSTM Forecasting
2.3.2. Random Forest Rainfall and Non-Rainfall Classification
2.3.3. Random Forest Rain Rate Regression
2.4. Evaluation Assesment
3. Results
3.1. Machine Learning Model Result
3.1.1. Multivariate LSTM Himawari-8 Forecasting
3.1.2. Random Forest Rainfall and Non-Rainfall Classification Result
3.1.3. Random Forest Rain Rate Regression
3.2. Testing Result
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Katiraie-Boroujerdy, P.S.; Nasrollahi, N.; Hsu, K.L.; Sorooshian, S. Evaluation of satellite-based precipitation estimation over Iran. J. Arid Environ. 2013, 97, 205–219. [Google Scholar] [CrossRef]
- Mahmoud, M.T.; Al-Zahrani, M.A.; Sharif, H.O. Assessment of global precipitation measurement satellite products over Saudi Arabia. J. Hydrol. 2018, 559, 1–12. [Google Scholar] [CrossRef]
- Derin, Y.; Yilmaz, K.K. Evaluation of Multiple Satellite-Based Precipitation Products over Complex Topography. J. Hydrometeorol. 2014, 15, 1498–1516. [Google Scholar] [CrossRef]
- Saouabe, T.; El Khalki, E.M.; Saidi, M.E.; Najmi, A.; Hadri, A.; Rachidi, S.; Jadoud, M.; Tramblay, Y. Evaluation of the GPM-IMERG precipitation product for flood modeling in a semi-arid mountainous basin in Morocco. Water 2020, 12, 2516. [Google Scholar] [CrossRef]
- Yu, R.; Zhou, T.; Xiong, A.; Zhu, Y.; Li, J. Diurnal variations of summer precipitation over contiguous China. Geophys. Res. Lett. 2007, 34, 223–234. [Google Scholar] [CrossRef]
- Sharifi, E.; Steinacker, R.; Saghafian, B. Assessment of GPM-IMERG and other precipitation products against gauge data under different topographic and climatic conditions in Iran: Preliminary results. Remote Sens. 2016, 8, 135. [Google Scholar] [CrossRef]
- Islam, T.; Rico-Ramirez, M.A.; Han, D.; Srivastava, P.K.; Ishak, A.M. Performance evaluation of the TRMM precipitation estimation using ground-based radars from the GPM validation network. J. Atmos. Sol. Terr. Phys. 2012, 77, 194–208. [Google Scholar] [CrossRef]
- Huffman, G.J.; Bolvin, D.T.; Nelkin, E.J.; Wolff, D.B.; Adler, R.F.; Gu, G.; Hong, Y.; Bowman, K.P.; Stocker, E.F. The TRMM Multisatellite Precipitation Analysis (TMPA): Quasi-global, multiyear, combined-sensor precipitation estimates at fine scales. J. Hydrometeorol. 2007, 8, 38–55. [Google Scholar] [CrossRef]
- Kuligowski, R.J. GOES-R Advanced Baseline Imager (ABI) Algorithm Theoretical Basis Document for Rainfall Rate (QPE). Version 2.0, Algorithm Theoretical Basis Document (ATBD), Technical Report. 2010; pp. 1–44. Available online: https://www.ncei.noaa.gov/access/metadata/landing-page/bin/iso?id=gov.noaa.ncdc:C01517 (accessed on 16 April 2022).
- Thies, B.; Nauss, T.; Bendix, J. Discriminating raining from nonraining cloud areas at mid-latitudes using meteosat second generation SEVIRI night-time data. Meteorol. Appl. 2008, 15, 219–230. [Google Scholar] [CrossRef]
- Hou, A.Y.; Kakar, R.K.; Neeck, S.; Azarbarzin, A.A.; Kummerow, C.D.; Kojima, M.; Oki, R.; Nakamura, K.; Iguchi, T. The global precipitation measurement mission. Bull. Am. Meteorol. Soc. 2014, 95, 701–722. [Google Scholar] [CrossRef]
- Sorooshian, S.; Hsu, K.L.; Gao, X.; Gupta, H.V.; Imam, B.; Braithwaite, D. Evaluation of PERSIANN system satellite-based es-timates of tropical rainfall. Bull. Am. Meteorol. Soc. 2000, 81, 2035–2046. [Google Scholar] [CrossRef]
- Schmidhuber, J. Deep learning in neural networks: An overview. Neural Netw. 2015, 61, 85–117. [Google Scholar] [CrossRef] [PubMed]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef] [PubMed]
- Mountrakis, G.; Im, J.; Ogole, C. Support vector machines in remote sensing: A review. ISPRS J. Photogramm. Remote Sens. 2011, 66, 247–259. [Google Scholar] [CrossRef]
- Breiman, L. Random forests. Mach. Learn. 2001, 46, 5–32. [Google Scholar] [CrossRef]
- Talei, A.; Chua, L.H. Influence of lag time on event-based rainfall—Runoff modeling using the data driven approach. J. Hydrol. 2012, 438–439, 223–233. [Google Scholar] [CrossRef]
- Taormina, R.; Chau, K.W. Data-driven input variable selection for rainfall–runoff modeling using binary-coded particle swarm optimization and Extreme Learning Machines. J. Hydrol. 2015, 529, 1617–1632. [Google Scholar] [CrossRef]
- Kuhnlein, M.; Appelhans, B.T.; Naub, T. Precipitation estimates from MSG SEVIRI daytime, nighttime, and twilight data with random forests. J. Appl. Meteorol. Climatol. 2014, 53, 2457–2480. [Google Scholar] [CrossRef]
- Grimes, D.I.; Coppola, E.; Verdecchia, M.; Visconti, G. A neural network approach to real-time rainfall estimation for Africa using satellite data. J. Hydrometeorol. 2003, 4, 1119–1133. [Google Scholar] [CrossRef]
- Mosavi, A.; Ozturk, P.; Chau, K.W. Flood prediction using machine learning models: Literature review. Water 2018, 10, 1536. [Google Scholar] [CrossRef]
- Abadi, M. TensorFlow: A system for large-scale machine learning. In Proceedings of the 12th USENIX Symposium on Operating Systems Design and Implementation, Savannah, GA, USA, 2–4 November 2016. [Google Scholar]
- Bergstra, J. Theano: A CPU and GPU math compiler in Python. In Proceedings of the 9th Python in Science Conference (SciPy 2010), Austin, TX, USA, 28 June–3 July 2010; pp. 1–7. [Google Scholar]
- Pedregosa, F. Scikit-learn: Machine learning in Python. J. Mach. Learn. Res. 2011, 12, 2825–2830. [Google Scholar]
- Chen, X.; He, G.; Chen, Y.; Zhang, S.; Chen, J.; Qian, J.; Yu, H. Short-term and local rainfall probability prediction based on a dislocation support vector machine model using satellite and in-situ observational data. IEEE Access 2019. [Google Scholar] [CrossRef]
- Alizadeh, M.J.; Kavianpour, M.R.; Kisi, O.; Nourani, V. A new approach for simulating and forecasting the rainfall-runoff process within the next two months. J. Hydrol. 2017, 548, 588–597. [Google Scholar] [CrossRef]
- Shi, X.; Chen, Z.; Wang, H.; Yeung, D.; Wong, W.; Woo, W. Convolutional LSTM network: A machine learning approach for precipitation nowcasting. Adv. Neural Inf. Process. Syst. 2015, 28, 802–810. Available online: http://papers.nips.cc/paper/5955-convolutional-lstm-network-a-machine-learning-approach-for-precipitation-nowcasting (accessed on 17 November 2022).
- Pérez-Vega, A.; Travieso-González, C.; Hernández-Travieso, J. An Approach for Multiparameter Meteorological Forecasts. Appl. Sci. 2018, 8, 2292. [Google Scholar] [CrossRef]
- Hochreiter, S.; Schmidhuber, J. Long Short-Term Memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef]
- Zhang, D.; Lin, J.; Peng, Q.; Wang, D.; Yang, T.; Sorooshian, S.; Liu, X.; Zhuang, J. Modeling and simulating of reservoir operation using the artificial neural network, support vector regression, deep learning algorithm. J. Hydrol. 2018, 565, 720–736. [Google Scholar] [CrossRef]
- Kratzert, F.; Klotz, D.; Brenner, C.; Schulz, K.; Herrnegger, M. Rainfall-runoff modelling using Long Short-Term Memory (LSTM) networks. Hydrol. Earth Syst. Sci. 2018, 22, 6005–6022. [Google Scholar] [CrossRef]
- Hu, C.; Wu, Q.; Li, H.; Jian, S.; Li, N.; Lou, Z. Deep learning with a long short-term memory networks approach for rain-fall-runoff simulation. Water 2018, 10, 1543. [Google Scholar] [CrossRef]
- Kühnlein, M.; Appelhans, T.; Thies, B.; Nauss, T. Improving the accuracy of rainfall rates from optical satellite sensors with machine learning—A random forests-based approach applied to MSG SEVIRI. Remote Sens. Environ. 2014, 141, 129–143. [Google Scholar] [CrossRef]
- Kidder, S.Q.; Vonder Haar, T.H. Satellite Meteorology, an Introduction; Academic Press: New York, NY, USA, 1995; Volume 466. [Google Scholar]
- Sipayung, S. The Spectrum Analysis of Meteorogical Elements in Indonesia. Master’s Thesis, Nagoya University, Nagoya, Japan, 1995. [Google Scholar]
- Pramudia, A. Climate Dynamics in Indonesia; Agricultural Research and Development Agency: Bangkok, Thailand, 2020. [Google Scholar]
- Gordon, A.L. Oceanography of the Indonesian seas and their throughflow. Oceanography 2005, 18, 15–27. [Google Scholar] [CrossRef]
- Setiawan, R.Y.; Habibi, A. Satellite detection of summer chlorophyll-a bloom in the gulf of tomini. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2011, 4, 944–948. [Google Scholar] [CrossRef]
- Susanto, R.D.; Moore, T.S.; Marra, J. Ocean color variability in the Indonesian Seas during the SeaWiFS era. Geochem. Geophys. Geosyst. 2006, 7, 1–16. [Google Scholar] [CrossRef]
- Wyrtki, K. Physical oceanography of the southeast asian waters. Scientific results of marine investigation of the south China sea and the gulf of Thailand 1959–1961. Phys. Oceanogr. Southeast Asian Waters Naga Rep. 1961, 2, 195. [Google Scholar]
- Mohtadi, M.; Oppo, D.W.; Steinke, S.; Stuut, J.B.W.; Pol-Holz, D.; Hebbeln, D.; Lückge, A. Glacial to Holocene swings of the Australian–Indonesian monsoon. Nat. Geosci. 2011, 4, 540–544. [Google Scholar] [CrossRef]
- Pramuwardani, I.; Sopaheluwakan, A. Indonesian rainfall variability during Western North Pacific and Australian monsoon phase related to convectively coupled equatorial waves. Arab. J. Geosci. 2018, 11, 673. [Google Scholar] [CrossRef]
- Ropelewski, C.F.; Halpert, M.S. Global and Regional Scale Precipitation Patterns Associated with the El Niño/Southern Oscillation. Mon. Weather Rev. 1987, 115, 1606–1626. [Google Scholar] [CrossRef]
- Hendon, H.H. Indonesian rainfall variability: Impacts of ENSO and local air-sea interaction. J. Clim. 2003, 16, 1775–1790. [Google Scholar] [CrossRef]
- Aldrian, E.; Susanto, R.D. Identification of three dominant rainfall regions within Indonesia and their relationship to sea surface temperature. Int. J. Climatol. 2003, 23, 1435–1452. [Google Scholar] [CrossRef]
- Lee, H.S. General Rainfall Patterns in Indonesia and the Potential Impacts of Local Seas on Rainfall Intensity. Water 2015, 7, 1751–1768. [Google Scholar] [CrossRef]
- Saji, N.; Goswami, B.; Vinayachandran, P.; Yamagata, T. A dipole mode in the Tropical Ocean. Nature 1999, 401, 360–363. [Google Scholar] [CrossRef]
- McBride, M.; Haylock, M.R.; Nicholls, N. Relationships between the Maritime Continent Heat Source and the El Niño–Southern Oscillation Phenomenon Relationships between the Maritime Continent Heat Source and the El Niño–Southern Oscillation Phenomenon. J. Clim. 2003, 16, 2905–2914. [Google Scholar] [CrossRef]
- Muntohar, A.S.; Mavrouli, O.; Jetten, V.G.; van Westen, C.J.; Hidayat, R. Development of Landslide Early Warning System Based on the Satellite-Derived Rainfall Threshold in Indonesia. In Understanding and Reducing Landslide Disaster Risk; Springer: Cham, Switzerland, 2021; pp. 227–235. [Google Scholar]
- Da, C. Preliminary assessment of the Advanced Himawari Imager (AHI) measurement onboard Himawari-8 geostationary satellite. Remote Sens. Lett. 2015, 6, 637–646. [Google Scholar] [CrossRef]
- Bessho, K. An Introduction to Himawari-8/9-Japan’s New-Generation Geostationary Meteorological Satellites. J. Meteorol. Soc. Jpn. 2016, 94, 151–183. [Google Scholar] [CrossRef]
- Min, M. Developing the science product algorithm testbed for Chinese next-generation geostationary me-teorological satellites: FengYun-4 series. J. Meteorol. Res. 2017, 31, 707–719. [Google Scholar] [CrossRef]
- Greenwald, T.J.; Pierce, R.B.; Schaack, T.K.; Otkin, J.A.; Rogal, M.; Bah, K.; Lenzen, A.J.; Nelson, J.P.; Li, J.; Huang, H.-L. Real-time simulation of the GOES-R ABI for user readiness and product evaluation. Bull. Am. Meteorol. Soc. 2016, 97, 245–261. [Google Scholar] [CrossRef]
- Chen, D.; Guo, J.; Wang, H.; Li, J.; Min, M.; Zhao, W.; Yao, D. The cloud top distribution and diurnal variation of clouds over East Asia: Preliminary results from Advanced Himawari Imager. J. Geophys. Res. Atmos. 2018, 123, 3724–3739. [Google Scholar] [CrossRef]
- Miller, S.D.; Schmit, T.L.; Seaman, C.J.; Lindsey, D.T.; Gunshor, M.M.; Kohrs, R.A.; Sumida, Y.; Hillger, D. A sight for sore eyes: The return of true color to geostationary satellites. Bull. Am. Meteorol. Soc. 2016, 97, 1803–1816. [Google Scholar] [CrossRef]
- Huffman, G.; Bolvin, D. TRMM and Other Data Precipitation Data Set Documentation; NASA: Greenbelt, MD, USA, 2007; pp. 1–25.
- Kim, K.; Park, J.; Baik, J.; Choi, M. Evaluation of topographical and seasonal feature using GPM IMERG and TRMM 3B42 over Far-East Asia. Atmos. Res. 2017, 187, 95–105. [Google Scholar] [CrossRef]
- Schneider, U.; Becker, A.; Finger, P.; Meyer-Christoffer, A.; Ziese, M.; Rudolf, B. GPCC’s new land surface precipitation climatology based on quality-controlled in situ data and its role in quantifying the global water cycle. Theor. Appl. Climatol. 2014, 115, 15–40. [Google Scholar] [CrossRef]
- Tan, J.; Huffman, G.J.; Bolvin, D.T.; Nelkin, E.J. IMERG V06: Changes to the morphing algorithm. J. Atmos. Ocean. Technol. 2019, 36, 2471–2482. [Google Scholar] [CrossRef]
- Alfarisy, G.A.; Mahmudy, W.F. Rainfall Forecasting in Banyuwangi Using Adaptive Neuro Fuzzy Inference System. J. Inf. Technol. Comput. Sci. 2016, 1, 65–71. [Google Scholar] [CrossRef]
- Haq, D.Z.; Novitasari, D.C.R.; Hamid, A.; Ulinnuha, N.; Farida, Y.; Nugraheni, R.D.; Nariswari, R.; Rohayani, H.; Pramulya, R.; Widjayanto, A. Long Short-Term Memory Algorithm for Rainfall Prediction Based on El-Nino and IOD Data. Procedia Comput. Sci. 2021, 179, 829–837. [Google Scholar] [CrossRef]
- Abdullah, A.S.; Ruchjana, B.N.; Jaya, I.G.; Soemartini. Comparison of SARIMA and SVM model for rainfall forecasting in Bogor city, Indonesia. J. Phys. 2021, 1722, 012061. [Google Scholar] [CrossRef]
- Afan, G.S.; Yaya, H.; Edi, A.; Wayan, S. Single Layer & Multi-layer Long Short-Term Memory (LSTM) Model with Intermediate Variables for Weather Forecasting. Procedia Comput. Sci. 2018, 135, 88–98. [Google Scholar]
- Sutawinaya, I.P.; Astawa, I.N.G.A.; Hariyanti, N.K.D. Comparison of Adaline and Multiple Linear Regression Methods for Rainfall Forecasting. J. Phys. Conf. Ser. 2018, 953, 012046. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Channel | No. | Band (µm) | Spatial Resolution (km) | Calibration Accuracy (%) | Primary Application |
|---|---|---|---|---|---|
| Visible & Near-Infrared | 1 | 0.47 | 1.0 | 2.63 | Aerosol |
| 2 | 0.51 | 1.0 | 2.53 | Vegetation | |
| 3 | 0.64 | 0.5 | 2.55 | Vegetation | |
| 4 | 0.86 | 1.0 | 2.39 | Cirrus | |
| 5 | 1.61 | 2.0 | 2.73 | Cloud, Snow | |
| 6 | 2.25 | 2.0 | 2.82 | Cloud, Aerosol | |
| Shortwave IR | 7 | 3.88 | 2.0 | 0.42 | Fire, Land and surface |
| Water Vapor | 8 | 6.24 | 2.0 | 0.34 | Water Vapor |
| 9 | 6.94 | 2.0 | 0.29 | Water Vapor | |
| 10 | 7.35 | 2.0 | 0.24 | Water Vapor | |
| Longwave IR | 11 | 8.6 | 2.0 | 0.2 | Water Vapor, Cloud |
| 12 | 9.63 | 2.0 | 0.21 | Ozone | |
| 13 | 10.4 | 2.0 | 0.23 | Cloud | |
| 14 | 11.24 | 2.0 | 0.22 | SST, Cloud | |
| 15 | 12.38 | 2.0 | 0.2 | SST, Cloud | |
| 16 | 13.28 | 2.0 | 0.22 | Cloud |
| Statistical Index | Equation |
|---|---|
| Mean Absolute Error (MAE) | |
| Root Mean Square Error (RMSE) |
| Time/Error | MAE (mm/h) | RMSE (mm/h) | RnR Classification Accuracy |
|---|---|---|---|
| 13:00 | 0.339 | 1.222 | 0.8360 |
| 13:30 | 0.371 | 1.404 | 0.8349 |
| 14:00 | 0.330 | 1.476 | 0.8359 |
| 14:30 | 0.321 | 1.535 | 0.8272 |
| 15:00 | 0.318 | 1.676 | 0.8205 |
| Comparison Data | Time/Error | MAE (mm/h) | RMSE (mm/h) |
|---|---|---|---|
| GSMaP | 13:00 | 0.3381 | 1.2541 |
| GSMaP | 14:00 | 0.2895 | 1.3067 |
| GSMaP | 15:00 | 0.3127 | 1.4515 |
| GSMaP-Gauge Calibrated | 13:00 | 0.39758146 | 1.1890213 |
| GSMaP-Gauge Calibrated | 14:00 | 0.34081572 | 1.0395403 |
| GSMaP-Gauge Calibrated | 15.00 | 0.35671735 | 1.2393955 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Simanjuntak, F.; Jamaluddin, I.; Lin, T.-H.; Siahaan, H.A.W.; Chen, Y.-N. Rainfall Forecast Using Machine Learning with High Spatiotemporal Satellite Imagery Every 10 Minutes. Remote Sens. 2022, 14, 5950. https://doi.org/10.3390/rs14235950
Simanjuntak F, Jamaluddin I, Lin T-H, Siahaan HAW, Chen Y-N. Rainfall Forecast Using Machine Learning with High Spatiotemporal Satellite Imagery Every 10 Minutes. Remote Sensing. 2022; 14(23):5950. https://doi.org/10.3390/rs14235950
Chicago/Turabian StyleSimanjuntak, Febryanto, Ilham Jamaluddin, Tang-Huang Lin, Hary Aprianto Wijaya Siahaan, and Ying-Nong Chen. 2022. "Rainfall Forecast Using Machine Learning with High Spatiotemporal Satellite Imagery Every 10 Minutes" Remote Sensing 14, no. 23: 5950. https://doi.org/10.3390/rs14235950
APA StyleSimanjuntak, F., Jamaluddin, I., Lin, T.-H., Siahaan, H. A. W., & Chen, Y.-N. (2022). Rainfall Forecast Using Machine Learning with High Spatiotemporal Satellite Imagery Every 10 Minutes. Remote Sensing, 14(23), 5950. https://doi.org/10.3390/rs14235950