

New Application: A Hand Air Writing System Based on Radar Dual View Sequential Feature Fusion Idea

Abstract
1. Introduction
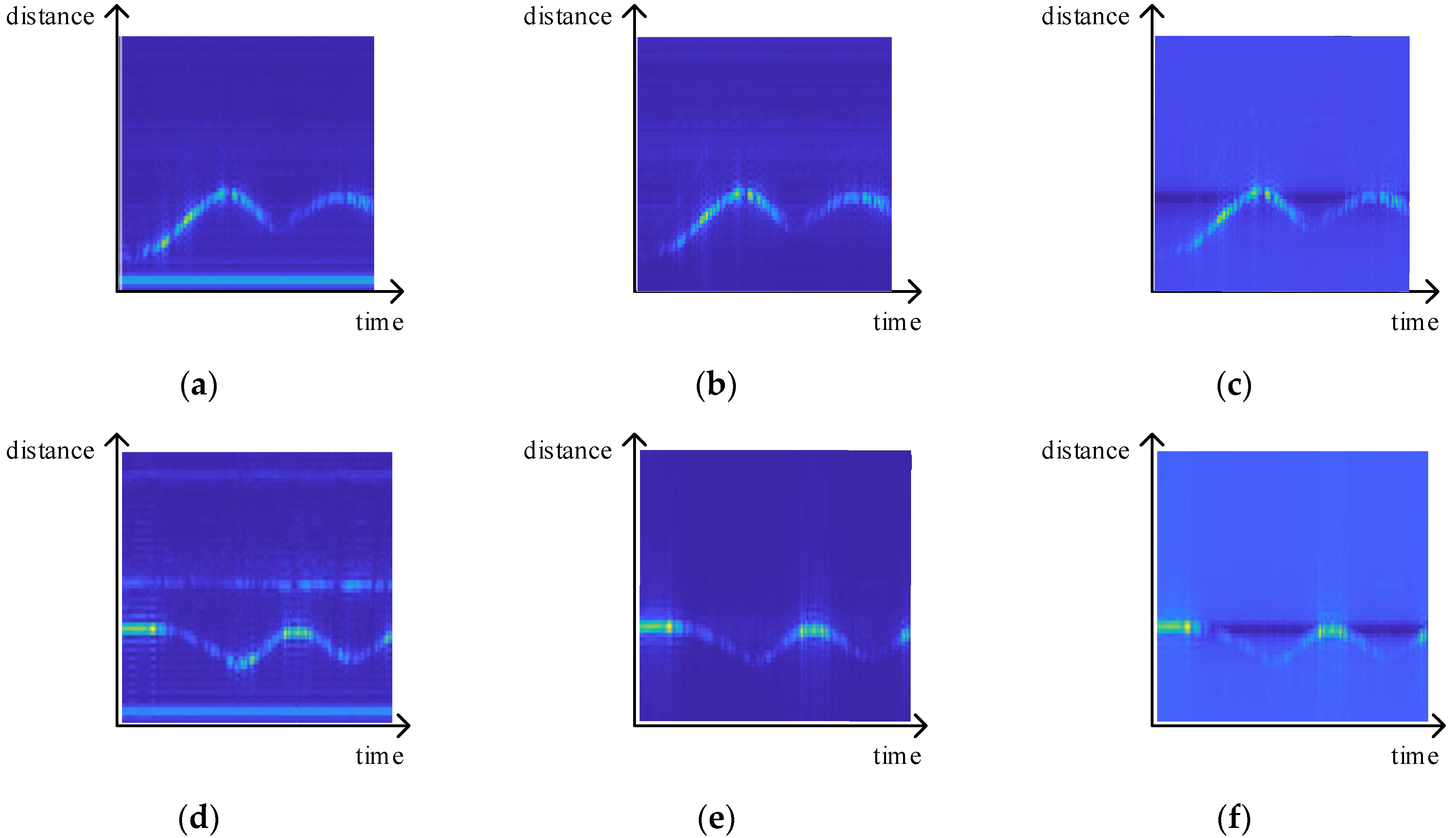
2. Raw Radar Data Preprocessing
3. Handwriting Trajectory Reconstruction
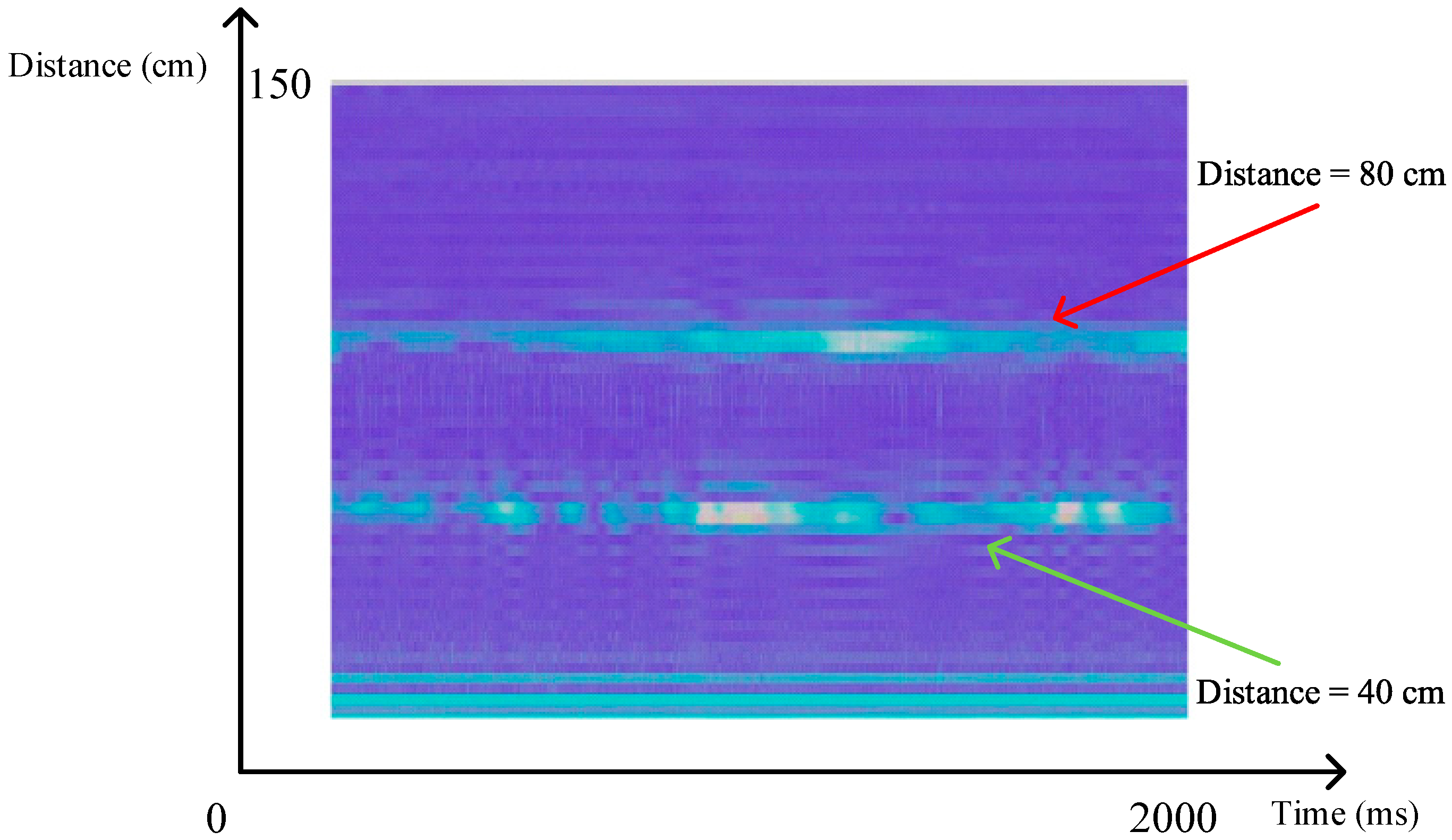
3.1. Distance Approximation Method
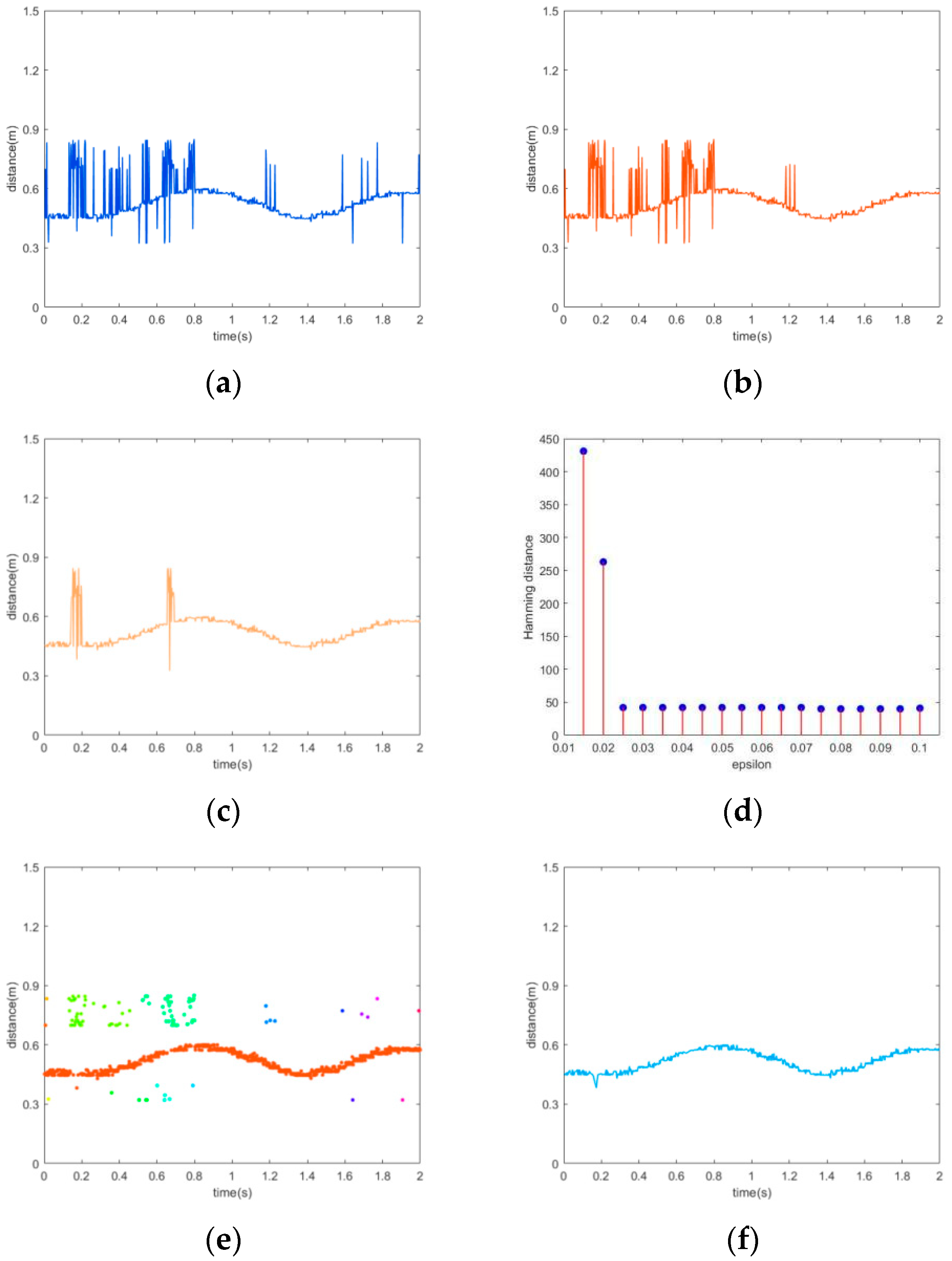
3.2. Trajectory Extraction Method Based on Peak-Value Search
3.3. Trajectory Re-Extraction by CDBSCAN
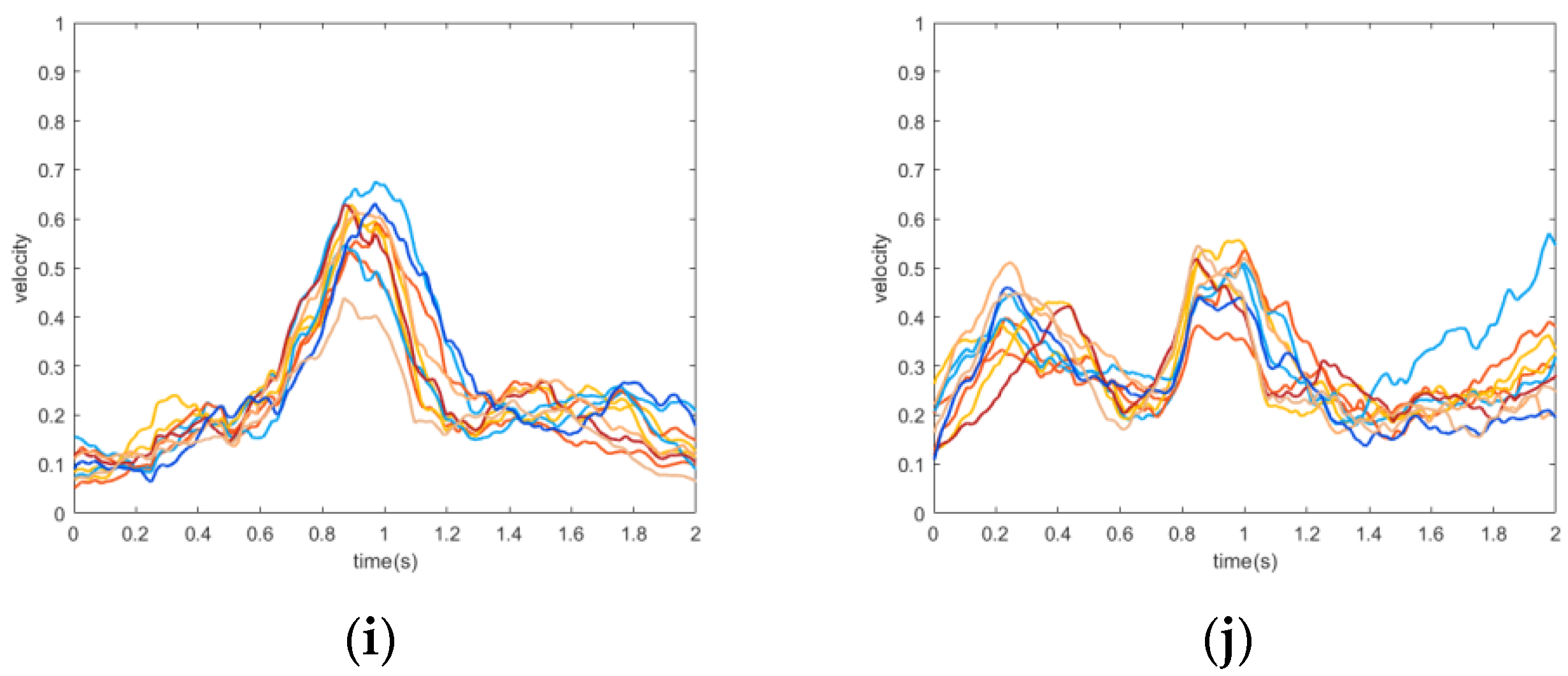
3.4. Trajectory Reconstruction with Velocity Features
4. Gesture Segmentation Based on Twice-Difference and High–Low Thresholds
5. Air Writing Trajectories Recognition
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Li, X.; He, Y.; Fioranelli, F.; Jing, X. Semisupervised human activity recognition with radar micro-Doppler signatures. IEEE Trans. Geosci. Remote Sens. 2021, 60, 5103112. [Google Scholar] [CrossRef]
- Erol, B.; Amin, M.G. Radar data cube processing for human activity recognition using multisubspace learning. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 3617–3628. [Google Scholar] [CrossRef]
- Skaria, S.; Al-Hourani, A.; Lech, M.; Evans, R.J. Hand-gesture recognition using two-antenna Doppler radar with deep convolutional neural networks. IEEE Sens. J. 2019, 19, 3041–3048. [Google Scholar] [CrossRef]
- Hazra, S.; Santra, A. Robust gesture recognition using millimetric-wave radar system. IEEE Sens. Lett. 2018, 2, 7001804. [Google Scholar] [CrossRef]
- Wu, J.; Zhu, Z.; Wang, H. Human Detection and Action Classification Based on Millimeter Wave Radar Point Cloud Imaging Technology. In Proceedings of the 2021 Signal Processing Symposium, Lodz, Poland, 20–23 September 2021; pp. 294–299. [Google Scholar]
- Li, Z.; Lei, Z.; Yan, A.; Solovey, E.; Pahlavan, K. ThuMouse: A Micro-gesture Cursor Input through mmWave Radar-based Interaction. In Proceedings of the 2020 IEEE International Conference on Consumer Electronics (ICCE), Las Vegas, NV, USA, 4–6 January 2020; pp. 1–9. [Google Scholar]
- Xia, Z.; Xu, F. Time-Space Dimension Reduction of Millimeter-Wave Radar Point-Clouds for Smart-Home Hand-Gesture Recognition. IEEE Sens. J. 2022, 22, 4425–4437. [Google Scholar] [CrossRef]
- Kim, Y.; Alnujaim, I.; Oh, D. Human activity classification based on point clouds measured by millimeter wave MIMO radar with deep recurrent neural networks. IEEE Sens. J. 2021, 21, 13522–13529. [Google Scholar] [CrossRef]
- Wang, Y.; Shu, Y.; Jia, X.; Zhou, M.; Xie, L.; Guo, L. Multifeature Fusion-Based Hand Gesture Sensing and Recognition System. IEEE Geosci. Remote Sens. Lett. 2022, 19, 1–5. [Google Scholar] [CrossRef]
- Arsalan, M.; Santra, A.; Issakov, V. RadarSNN: A Resource Efficient Gesture Sensing System Based on mm-Wave Radar. IEEE Trans. Microw. Theory Tech. 2022, 70, 2451–2461. [Google Scholar] [CrossRef]
- Shen, X.; Zheng, H.; Feng, X.; Hu, J. ML-HGR-Net: A Meta-Learning Network for FMCW Radar Based Hand Gesture Recognition. IEEE Sens. J. 2022, 22, 10808–10817. [Google Scholar] [CrossRef]
- Elshenaway, A.R.; Guirguis, S.K. On-Air Hand-Drawn Doodles for IoT Devices Authentication During COVID-19. IEEE Access 2021, 9, 161723–161744. [Google Scholar] [CrossRef]
- Kane, L.; Khanna, P. Vision-Based Mid-Air Unistroke Character Input Using Polar Signatures. IEEE Trans. Hum. Mach. Syst. 2017, 47, 1077–1088. [Google Scholar] [CrossRef]
- Hsieh, C.-H.; Lo, Y.-S.; Chen, J.-Y.; Tang, S.-K. Air-Writing Recognition Based on Deep Convolutional Neural Networks. IEEE Access 2021, 9, 142827–142836. [Google Scholar] [CrossRef]
- Pan, T.; Kuo, C.; Liu, H.; Hu, M. Handwriting Trajectory Reconstruction Using Low-Cost IMU. IEEE Trans. Emerg. Top. Comput. Intell. 2019, 3, 261–270. [Google Scholar] [CrossRef]
- Arsalan, M.; Santra, A. Character Recognition in Air-Writing Based on Network of Radars for Human-Machine Interface. IEEE Sens. J. 2019, 19, 8855–8864. [Google Scholar] [CrossRef]
- MArsalan; Santra, A.; Issakov, V. Radar Trajectory-based Air-Writing Recognition using Temporal Convolutional Network. In Proceedings of the 2020 19th IEEE International Conference on Machine Learning and Applications (ICMLA), Miami, FL, USA, 14–17 December 2020; pp. 1454–1459. [Google Scholar]
- Arsalan, M.; Santra, A.; Bierzynski, K.; Issakov, V. Air-Writing with Sparse Network of Radars using Spatio-Temporal Learning. In Proceedings of the 2020 25th International Conference on Pattern Recognition (ICPR), Milan, Italy, 10–15 January 2021; pp. 8877–8884. [Google Scholar]
- Lee, H.; Lee, Y.; Choi, H.; Lee, S. Digit Recognition in Air-Writing Using Single Millimeter-Wave Band Radar System. IEEE Sens. J. 2022, 22, 9387–9396. [Google Scholar] [CrossRef]
- Hendy, N.; Fayek, H.M.; Al-Hourani, A. Deep Learning Approaches for Air-Writing Using Single UWB Radar. IEEE Sens. J. 2022, 22, 11989–12001. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, D.; Fu, Y.; Yao, D.; Xie, L.; Zhou, M. Multi-Hand Gesture Recognition Using Automotive FMCW Radar Sensor. Remote Sens. 2022, 14, 2374. [Google Scholar] [CrossRef]
- Krishna, K.; Murty, M.N. Genetic K-means algorithm. IEEE Trans. Syst. Man Cybern. Part B Cybern. 1999, 29, 433–439. [Google Scholar] [CrossRef] [PubMed]
- Shen, J.; Hao, X.; Liang, Z.; Liu, Y.; Wang, W.; Shao, L. Real-time superpixel segmentation by DBSCAN clustering algorithm. IEEE Trans. Image Process. 2016, 25, 5933–5942. [Google Scholar] [CrossRef] [PubMed]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value | Parameters | Value |
|---|---|---|---|
| Number of transmitting antennas | 1 | Number of frames | 100 |
| Number of receiving antennas | 4 | Number of chirps | 128 |
| Frame period (ms) | 20 | Number of samples per chirp | 64 |
| Frequency slope (MHz/us) | 50 | Frequency band of front radar (GHz) | 77–79 |
| Sample rate (MHz) | 2 | Frequency band of side radar (GHz) | 79–81 |
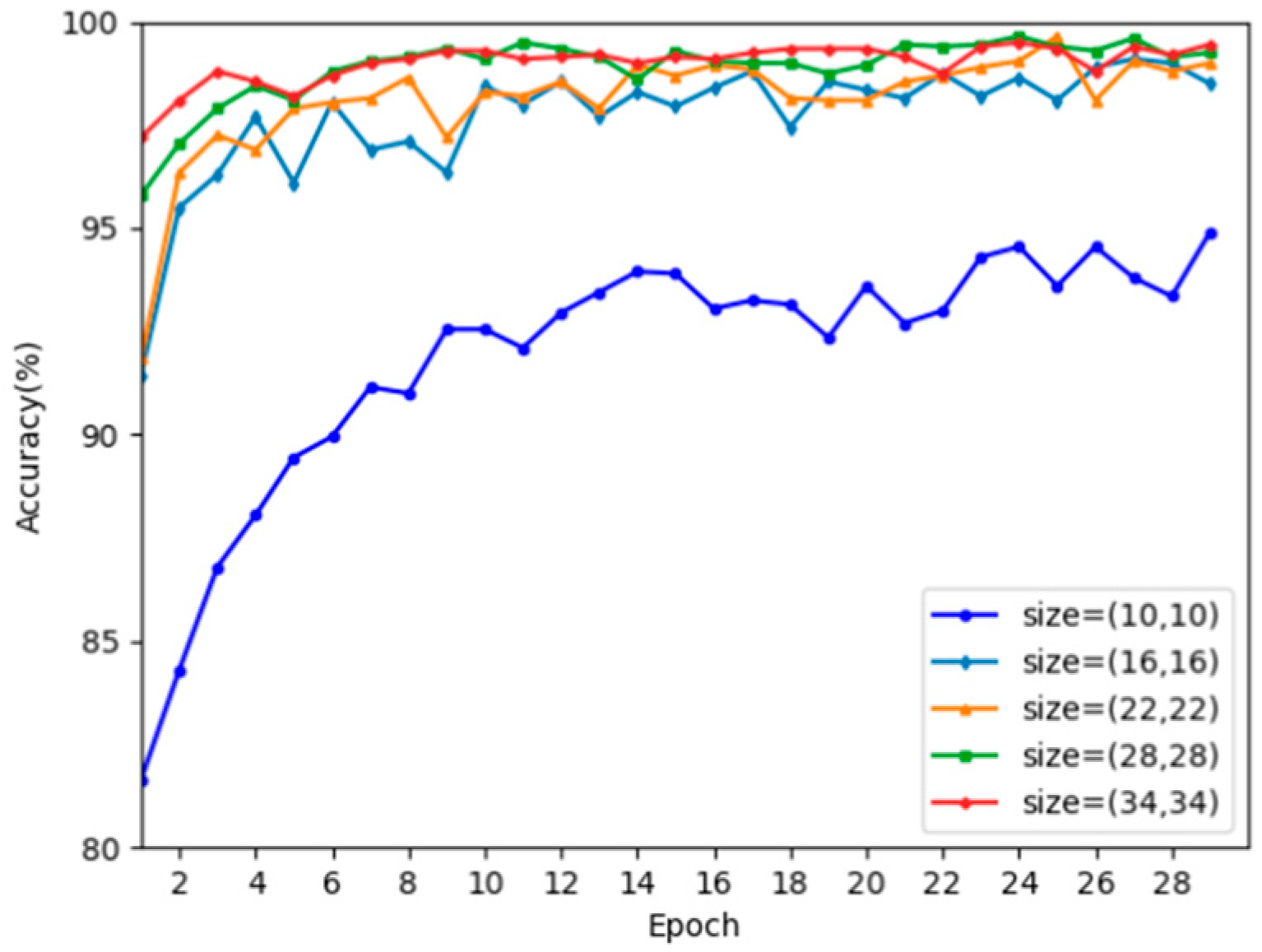
| Input Size | Number of Parameters | Time Cost (ms/step) | Accuracy (%) |
|---|---|---|---|
| 34 × 34 | 33,834 | 19 | 99.23 |
| 28 × 28 | 29,354 | 15 | 99.24 |
| 22 × 22 | 26,154 | 12 | 98.72 |
| 16 × 16 | 26,154 | 10 | 98.45 |
| 10 × 10 | 24,234 | 7 | 93.62 |
| Input Feature Map | Network Type | Average Accuracy (%) |
|---|---|---|
| FRTM | CNN | 76.60 |
| SRTM | CNN | 71.15 |
| FVTM | CNN | 82.15 |
| SVTM | CNN | 77.25 |
| FRTM + SRTM | Two-stream CNN | 89.65 |
| FVTM + SVTM | Two-stream CNN | 92.55 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, Y.; Liu, T.; Feng, X.; Zhao, Z.; Cui, W.; Fan, Y. New Application: A Hand Air Writing System Based on Radar Dual View Sequential Feature Fusion Idea. Remote Sens. 2022, 14, 5177. https://doi.org/10.3390/rs14205177
Zhao Y, Liu T, Feng X, Zhao Z, Cui W, Fan Y. New Application: A Hand Air Writing System Based on Radar Dual View Sequential Feature Fusion Idea. Remote Sensing. 2022; 14(20):5177. https://doi.org/10.3390/rs14205177
Chicago/Turabian StyleZhao, Yinan, Tao Liu, Xiang Feng, Zhanfeng Zhao, Wenqing Cui, and Yu Fan. 2022. "New Application: A Hand Air Writing System Based on Radar Dual View Sequential Feature Fusion Idea" Remote Sensing 14, no. 20: 5177. https://doi.org/10.3390/rs14205177
APA StyleZhao, Y., Liu, T., Feng, X., Zhao, Z., Cui, W., & Fan, Y. (2022). New Application: A Hand Air Writing System Based on Radar Dual View Sequential Feature Fusion Idea. Remote Sensing, 14(20), 5177. https://doi.org/10.3390/rs14205177