
Intra-Pulse Frequency Coding Design for a High-Resolution Radar against Smart Noise Jamming


Abstract

1. Introduction
- (1)
- The periodic data missing of the FMCW signal in smart noise jamming scenarios causes a serious sidelobe problem. We propose the IPFC-FMCW waveform with non-periodic data missing in smart noise jamming scenarios to solve the periodic data missing problem of the FMCW signal.
- (2)
- We take the three metrics of the range profile as the objective and use the simulated annealing method to optimize the waveform, which reduces the proportion of jamming signals and increases the peak to sidelobe ratio.
- (3)
- Compared with the existing grid-based range recovery methods, the proposed range recovery method including a REFINE step is suitable for scenes with missing observations.
2. Working Scenario and Transmitted Signal Model
2.1. Working Scenario
2.2. Transmitted Signal Model
3. Received Signal Model
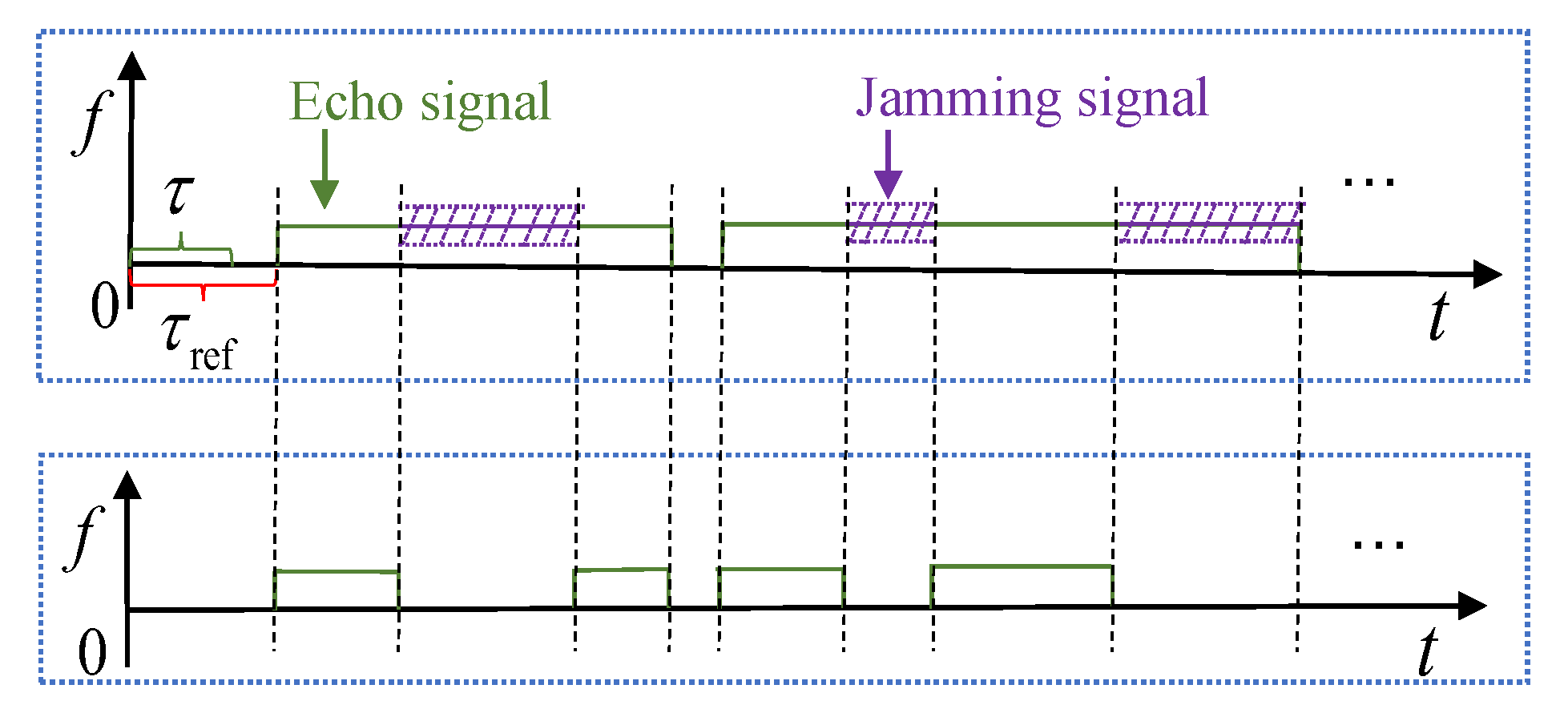
3.1. Echo Signal Model
3.2. Jamming Signal Model
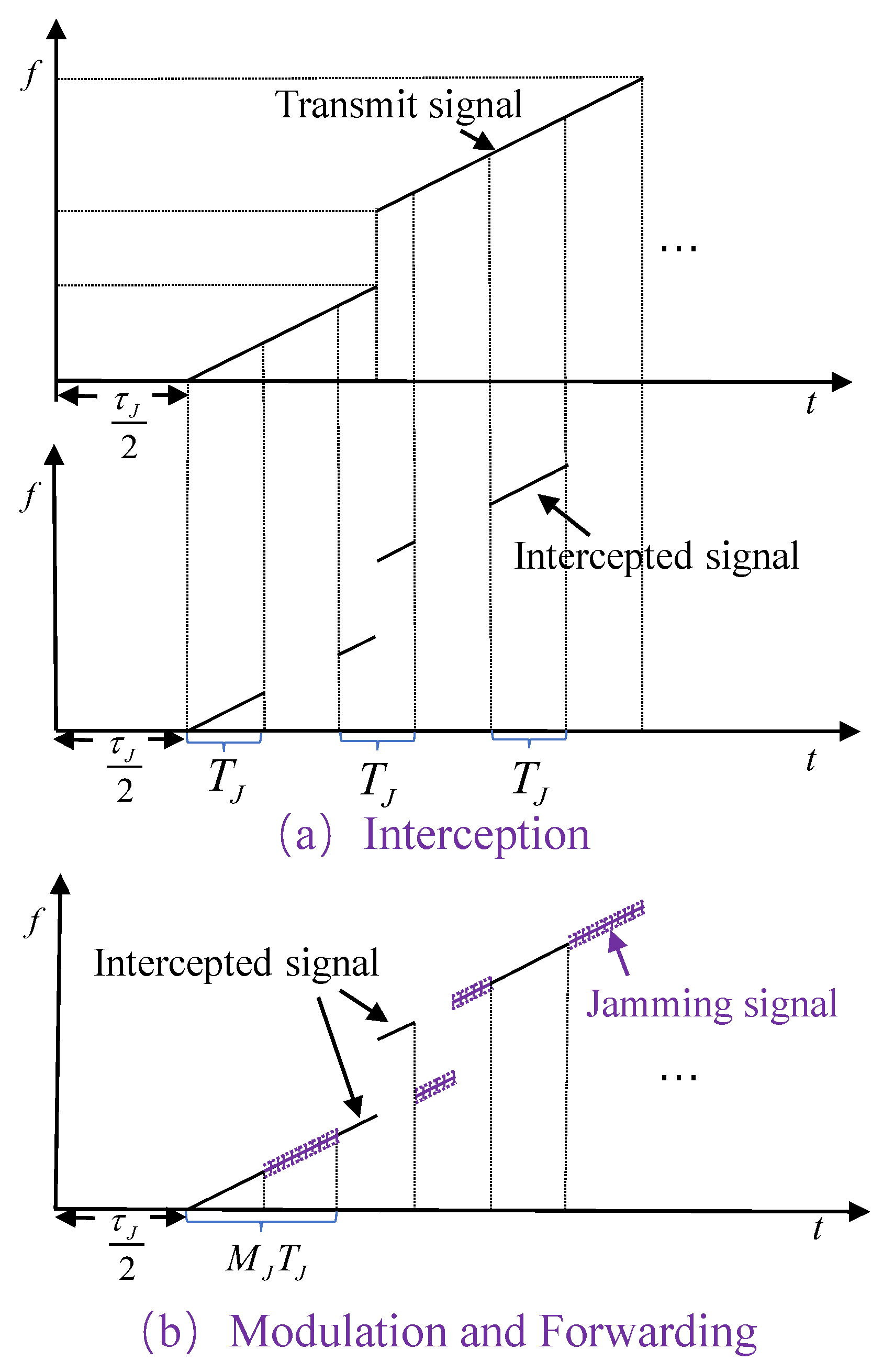
3.2.1. Jamming Signal Generation
3.2.2. Received Jamming Signal
4. Waveform Design
4.1. Jamming Suppression
4.2. Waveform Design Problem Formulation
4.3. Waveform Design Method
| Algorithm 1 Simulated Annealing |
|
| Steps: |
| 1: while do |
| 2: for |
| 3: Two chips are randomly selected from and , and the width and frequency of these two chips are modified to obtain the new that satisfies the constraints of (16). |
| 4: Calculate the evaluation value corresponding to , . |
| 5: if |
| 6: |
| 7: if |
| 8: |
| 9: end |
| 10: else |
| 11: Generate random number to compare with exp. |
| 12: if exp |
| 13: |
| 14: else |
| 15: |
| 16: end |
| 17: end |
| 18: end for |
| 19: |
| 20: end while |
| Output: . |
5. Range Recovery Approach
5.1. Problem Formulation
5.2. Range Estimation Method
| Algorithm 2 R-OMP |
| Input: signal , sparsity K, and parameter |
| for |
| 1: Compute the |
| 2: Find the parameter of the k-th scatterer |
| 3: Find the parameter of the kth scatterer |
| 4: Update: |
| 5: . |
| Output:. |
| Algorithm 3 REFINE() |
| Input: Parameter |
| repeat: |
| 1: for each in |
| 2: Compute loss function and gradient |
| 3: , |
| 4: repeat: |
| 5: Update , |
| 6: until: |
| 7: end for |
| until convergence |
6. Simulations
6.1. Simulation Settings
6.2. Waveform Design Evaluation
6.2.1. Optimization Problem Coefficient
6.2.2. Jamming with Estimated Parameters
6.2.3. Jamming with Unknown Parameters
6.3. Range Recovery Approach Evaluation
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhang, S.; Liu, Y.; Li, X.; Bi, G. Bayesian High Resolution Range Profile Reconstruction of High-Speed Moving Target From Under-Sampled Data. IEEE Trans. Image Process. 2020, 29, 5110–5120. [Google Scholar] [CrossRef] [PubMed]
- Fang, W.; Fang, L. Joint Angle and Range Estimation With Signal Clustering in FMCW Radar. IEEE Sens. J. 2020, 20, 1882–1892. [Google Scholar] [CrossRef]
- Zhang, X.; Wang, W.; Zheng, X.; Wei, Y. A novel radar target recognition method for open and imbalanced high-resolution range profile. Digit. Signal Process. 2021, 118, 103212. [Google Scholar] [CrossRef]
- Ojowu, O.; Xu, L.; Li, J.; Anderson, J.; Nguyen, L.; Stoica, P. High-Resolution Imaging for Impulse-Based Forward-Looking Ground Penetrating Radar. Int. J. Remote Sens. Appl. 2015, 5, 11–24. [Google Scholar] [CrossRef]
- Camp, W.W.; Mayhan, J.T.; O’Donnell, R.M. Wideband radar for ballistic missile defense and range-Doppler imaging of satellites. Linc. Lab. J. 2000, 12, 267–280. [Google Scholar]
- Wang, L.; Huang, T.; Liu, Y. Phase compensation and image autofocusing for randomized stepped frequency ISAR. IEEE Sens. J. 2019, 19, 3784–3796. [Google Scholar] [CrossRef]
- Zhang, Y.; Jakobsson, A.; Zhang, Y.; Huang, Y.; Yang, J. Wideband sparse reconstruction for scanning radar. IEEE Trans. Geosci. Remote Sens. 2018, 56, 6055–6068. [Google Scholar] [CrossRef]
- Xi, R.; Zheng, C.; Huang, T.; Wang, L.; Liu, Y. Joint Range and Angle Estimation for Wideband Forward-Looking Imaging Radar. IEEE Sens. J. 2022, 22, 446–460. [Google Scholar] [CrossRef]
- Xi, R.; Huang, T.; Zhang, G.; Wang, L.; Liu, Y. Forward-looking imaging based on alternating descent conditional gradient. Syst. Eng. Electron. 2021, 43, 2439–2447. (In Chinese) [Google Scholar] [CrossRef]
- Tropp, J.; Gilbert, A.C. Signal recovery from partial information via orthogonal matching pursuit. IEEE Trans. Inform. Theory 2007, 53, 4655–4666. [Google Scholar] [CrossRef]
- Potter, L.C.; Ertin, E.; Parker, J.T.; Cetin, M. Sparsity and Compressed Sensing in Radar Imaging. Proc. IEEE 2010, 98, 1006–1020. [Google Scholar] [CrossRef]
- Li, H.; Wang, C.; Wang, K.; He, Y.; Zhu, X. High resolution range profile of compressive sensing radar with low computational complexity. IET Radar Sonar Navig. 2015, 9, 984–990. [Google Scholar] [CrossRef]
- Wang, W.; Wu, J.; Pei, J.; Mao, X.; Yang, J. An antideceptive jamming method for multistatic synthetic aperture radar based on collaborative localization and spatial suppression. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 2757–2768. [Google Scholar] [CrossRef]
- Li, Y.; Huang, D.; Xing, S.; Wang, X. A Review of Synthetic Aperture Radar Jamming Technique. J. Radars 2020, 9, 753–764. (In Chinese) [Google Scholar] [CrossRef]
- Hanbali, S.B.S. Technique to Counter Improved Active Echo Cancellation Based on ISRJ With Frequency Shifting. IEEE Sens. J. 2019, 19, 9194–9199. [Google Scholar] [CrossRef]
- Huang, D.; Xing, S.; Lin, Y.; Li, Y.; Xiao, S. Fake SAR Signal Generation Method Based on Noise Convolution Modulation. J. Radars 2020, 9, 898–907. (In Chinese) [Google Scholar] [CrossRef]
- Hao, H.; Zeng, D.; Ge, P. Research on the method of smart noise jamming on pulse radar. In Proceedings of the 2015 Fifth International Conference on Instrumentation and Measurement, Computer, Communication and Control (IMCCC), Qinhuangdao, China, 18–20 September 2015; pp. 1339–1342. [Google Scholar]
- Zhou, C.; Shi, F.; Liu, Q. Research on parameters estimation and suppression for C&I jamming. In Proceedings of the 2016 CIE International Conference on Radar (RADAR), Guangzhou, China, 10–13 October 2016; pp. 1–4. [Google Scholar]
- Chen, J.; Wu, W.; Xu, S.; Chen, Z.; Zou, J. Band pass filter design against interrupted-sampling repeater jamming based on time-frequency analysis. IET Radar Sonar Navig. 2019, 13, 1646–1654. [Google Scholar] [CrossRef]
- Yuan, H.; Wang, C.; Li, X.; An, L. A method against interrupted-sampling repeater jamming based on energy function detection and band-pass filtering. Int. J. Antennas Propag. 2017, 2017, 6759169. [Google Scholar] [CrossRef]
- Meng, J.; Fu, Y.; Chen, Y.; Wang, N.; Zhang, Y. Adaptive suppression method of radar jamming in joint time frequency domain. In Proceedings of the 2nd International Conference on Information Technology and Electronic Commerce, Dalian, China, 20–21 December 2014; pp. 212–215. [Google Scholar]
- Liu, Z.; Du, S.; Wu, Y.; Sha, M.; Xing, M.; Quan, Y. Anti-interrupted Sampling Repeater Jamming Method for Interpulse and Intrapulse Frequency-agile Radar. J. Radars 2022, 11, 1–12. (In Chinese) [Google Scholar]
- Cao, F.; Chen, Z.; Feng, X.; He, C.; Xu, J. Optimal design of anti-interrupted sampling repeater jamming waveform for missile-borne radar based on an improved genetic algorithm. IET Signal Process. 2021, 15, 622–632. [Google Scholar] [CrossRef]
- Zhang, Y.; Wei, Y.; Yu, L. Anti-jamming pulse diversity phase coded waveform design based on periodic ambiguity function shaping. Signal Process. 2022, 196, 108510. [Google Scholar] [CrossRef]
- Uysal, F. Phase-coded FMCW automotive radar: System design and interference mitigation. IEEE Trans. Veh. Technol. 2019, 69, 270–281. [Google Scholar] [CrossRef]
- Ma, D.; Shlezinger, N.; Huang, T.; Liu, Y.; Eldar, Y.C. FRaC: FMCW-Based Joint Radar-Communications System Via Index Modulation. IEEE J. Sel. Top. Signal Process. 2021, 15, 1348–1364. [Google Scholar] [CrossRef]
- Wang, Y.; Zhu, S. Main-beam range deceptive jamming suppression with simulated annealing FDA-MIMO radar. IEEE Sens. J. 2020, 20, 9056–9070. [Google Scholar] [CrossRef]
- Liu, B. Orthogonal Discrete Frequency-Coding Waveform Set Design with Minimized Autocorrelation Sidelobes. IEEE Trans. Aerosp. Electron. Syst. 2009, 45, 1650–1657. [Google Scholar] [CrossRef]
- Qazi, F.A.; Fam, A.T. Discrete Frequency-Coding Waveform sets based on Piecewise Linear FM. In Proceedings of the 2014 IEEE Radar Conference, Cincinnati, OH, USA, 19–23 May 2014; pp. 469–473. [Google Scholar] [CrossRef]
- Rihaczek, A.W. Doppler-tolerant signal waveforms. Proc. IEEE 1966, 54, 849–857. [Google Scholar] [CrossRef]
- Richards, M.A. Fundamentals of Radar Signal Processing; McGraw-Hill Education: New York, NY, USA, 2014. [Google Scholar]
- Chen, V.C.; Qian, S. Joint time-frequency transform for radar range-Doppler imaging. IEEE Trans. Aerosp. Electron. Syst. 1998, 34, 486–499. [Google Scholar] [CrossRef]
- Wang, W.Q. MIMO SAR OFDM chirp waveform diversity design with random matrix modulation. IEEE Trans. Geosci. Remote Sens. 2014, 53, 1615–1625. [Google Scholar] [CrossRef]
- Patole, S.M.; Torlak, M.; Wang, D.; Ali, M. Automotive radars: A review of signal processing techniques. IEEE Signal Process. Mag. 2017, 34, 22–35. [Google Scholar] [CrossRef]
- Huang, J.; Sun, M.; Ma, J.; Chi, Y. Super-resolution image reconstruction for high-density three-dimensional single-molecule microscopy. IEEE Trans. Comput. Imaging 2017, 3, 763–773. [Google Scholar] [CrossRef]
- Yau, S.F.; Bresler, Y. A compact Cramer-Rao bound expression for parametric estimation of superimposed signals. IEEE Trans. Signal Process. 1992, 40, 1226–1230. [Google Scholar] [CrossRef]
- Melino, R.; Kodituwakku, S.; Tran, H.T. Orthogonal matching pursuit and matched filter techniques for the imaging of rotating blades. In Proceedings of the 2015 IEEE Radar Conference, Johannesburg, South Africa, 27–30 October 2015; pp. 1–6. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Radar initial frequency | 8 GHz |
| Radar pulse width | 50 s |
| Radar signal bandwidth B | 2 GHz |
| Number of carrier frequency M | 50 |
| Frequency interval | 40 MHz |
| Number of chips Q | 8 |
| Tracking delay error | 0 s |
| Radar sampling frequency | 40 MHz |
| Jammer sampling period | 1 s |
| Jammer duty cycle parameter | 2 |
| Number of scatterers K | 4 |
| Scatterers amplitude | {1, 1, 0.32, 0.18} |
| Scatterers ranges | {3, 4, 5, 6.87} m |
| Monte Carlo trials | 500 |
| SNRL (dB) | PSLR (dB) | MLW (m) | |
|---|---|---|---|
| FMCW (ideal) | 0 | 13.25 | 0.075 |
| FMCW | 3.01 | 3.92 | 0.075 |
| Random | 2.68 | 6.96 | 0.1 |
| Optimized | 2.22 | 16.69 | 0.096 |
| SNRL (dB) | PSLR (dB) | MLW (m) | |
|---|---|---|---|
| FMCW (ideal) | 0 | 13.25 | 0.075 |
| FMCW | 3.67 | 2.86 | 0.075 |
| Random | 2.4 | 8.9 | 0.097 |
| Optimized | 2.01 | 12.83 | 0.082 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xi, R.; Ma, D.; Liu, X.; Wang, L.; Liu, Y. Intra-Pulse Frequency Coding Design for a High-Resolution Radar against Smart Noise Jamming. Remote Sens. 2022, 14, 5149. https://doi.org/10.3390/rs14205149
Xi R, Ma D, Liu X, Wang L, Liu Y. Intra-Pulse Frequency Coding Design for a High-Resolution Radar against Smart Noise Jamming. Remote Sensing. 2022; 14(20):5149. https://doi.org/10.3390/rs14205149
Chicago/Turabian StyleXi, Rongyan, Dingyou Ma, Xiang Liu, Lei Wang, and Yimin Liu. 2022. "Intra-Pulse Frequency Coding Design for a High-Resolution Radar against Smart Noise Jamming" Remote Sensing 14, no. 20: 5149. https://doi.org/10.3390/rs14205149
APA StyleXi, R., Ma, D., Liu, X., Wang, L., & Liu, Y. (2022). Intra-Pulse Frequency Coding Design for a High-Resolution Radar against Smart Noise Jamming. Remote Sensing, 14(20), 5149. https://doi.org/10.3390/rs14205149