
Comparison of Three Convolution Neural Network Schemes to Retrieve Temperature and Humidity Profiles from the FY4A GIIRS Observations
Abstract
1. Introduction
2. Data
2.1. GIIRS Data
2.2. ERA5 Reanalysis Data
2.3. Radiosonde Observation Data
3. Introduction of Three Convolutional Neural Network Schemes
3.1. Training Data for the One-Dimensional Scheme 1D-Net
3.2. Training Data for the Three-Dimensional Scheme U-Net 1
3.3. Training Data for the Three-Dimensional Scheme U-Net 2
3.4. Model Structure and Parameter Optimization
4. Validation of Retrieval Results
4.1. Comparison with ERA5 Reanalysis
4.2. Comparison with Radiosonde Observations
4.3. Discussion of Three Convolution Neural Network Schemes
5. Conclusions
- (1)
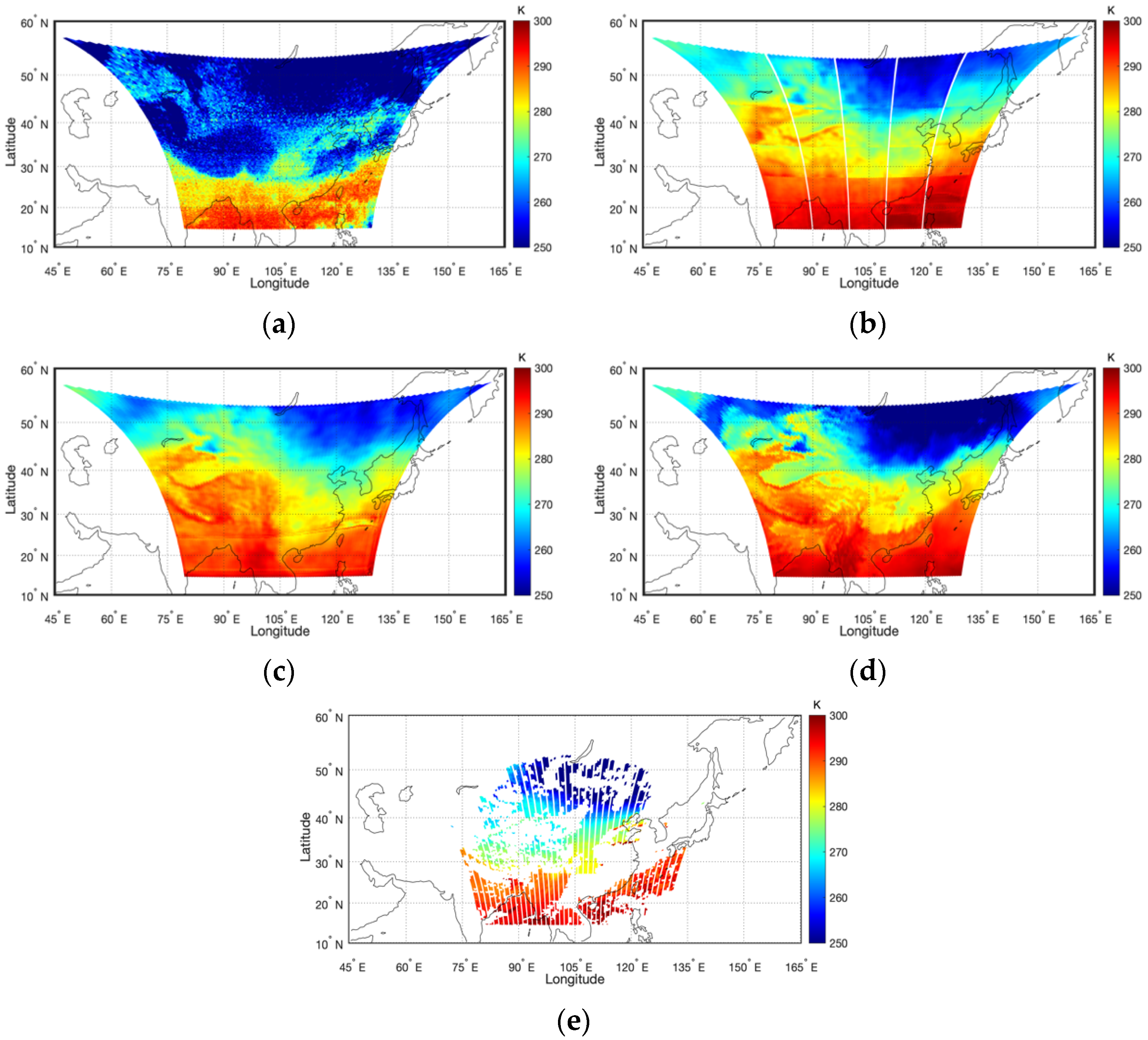
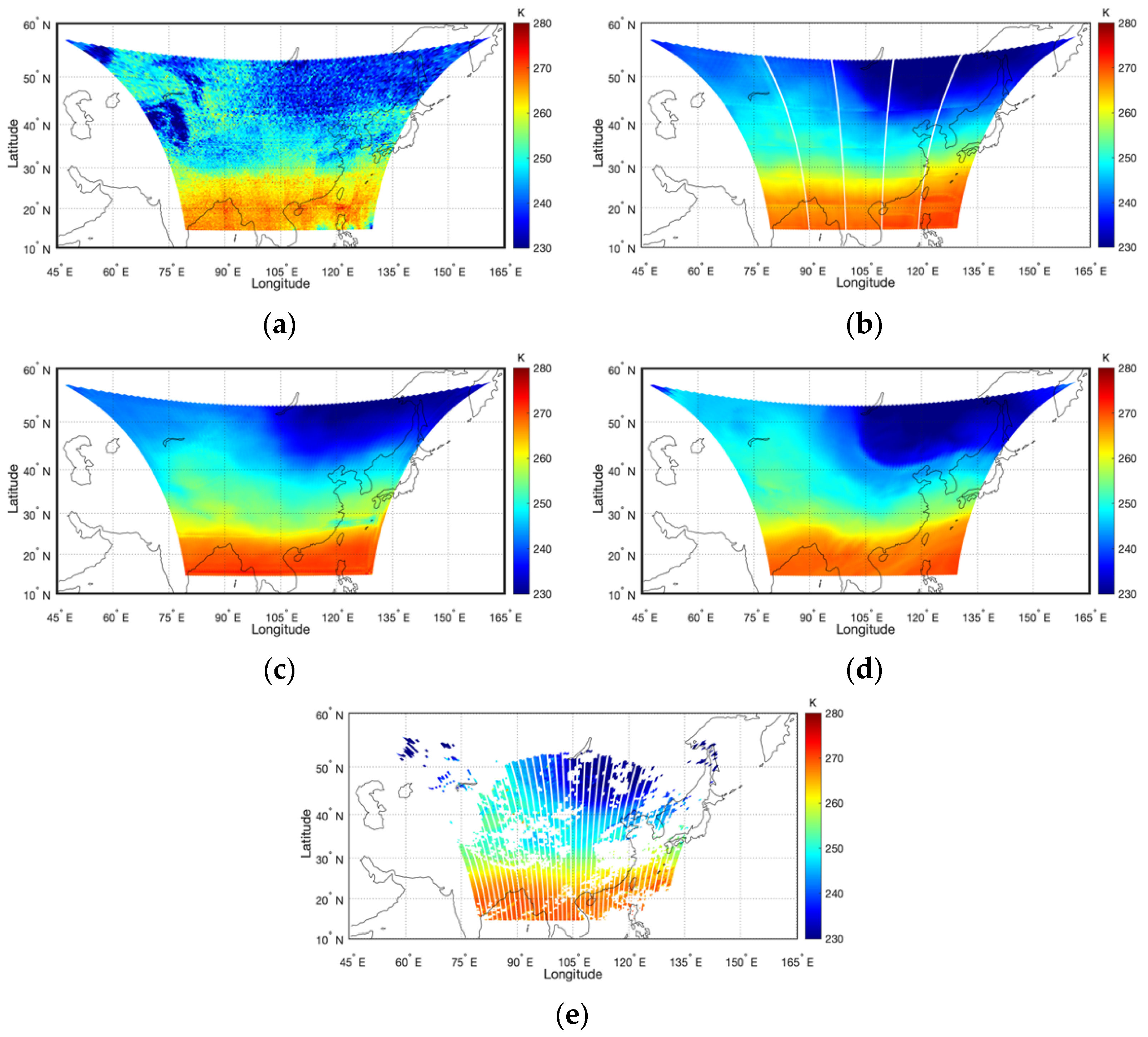
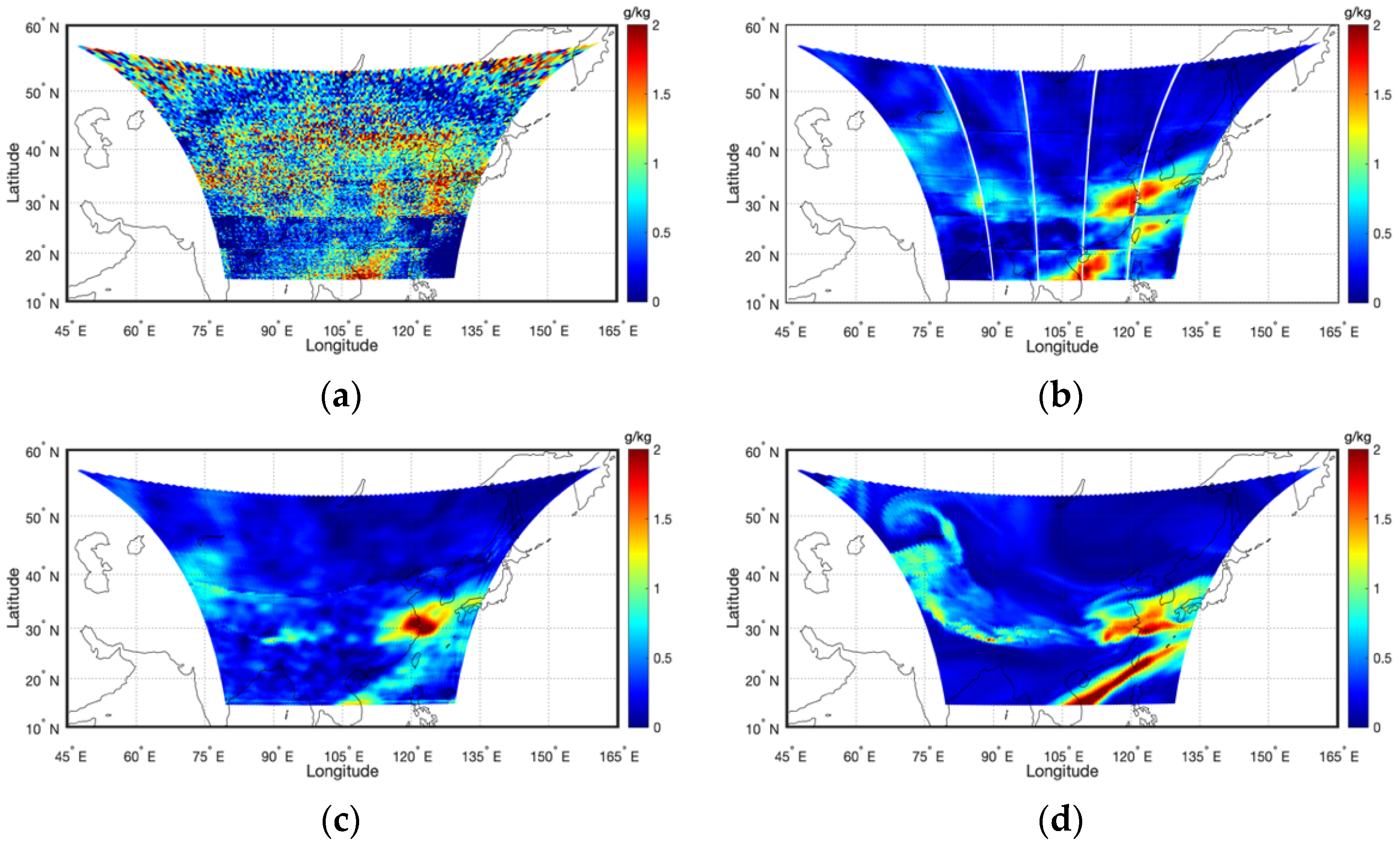
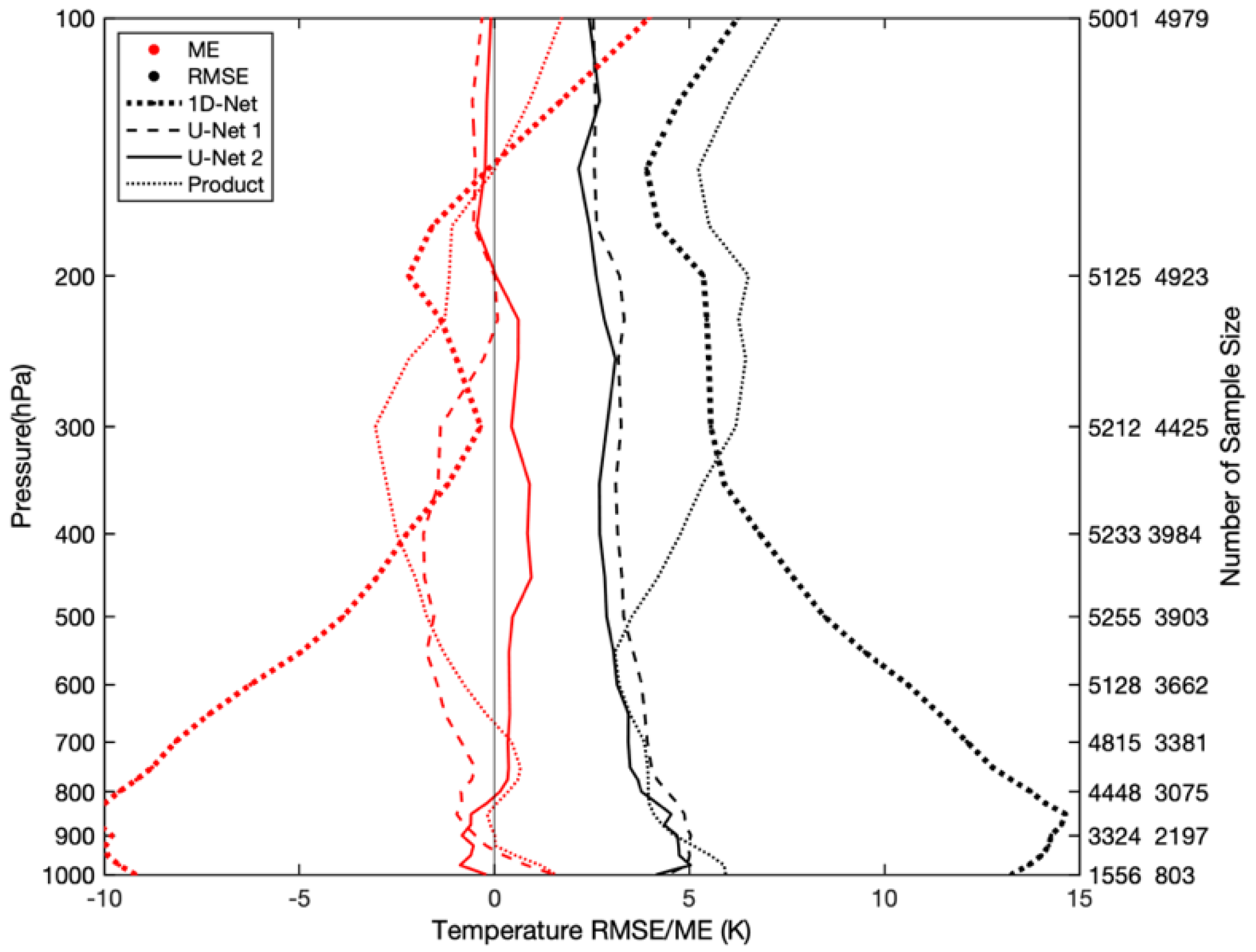
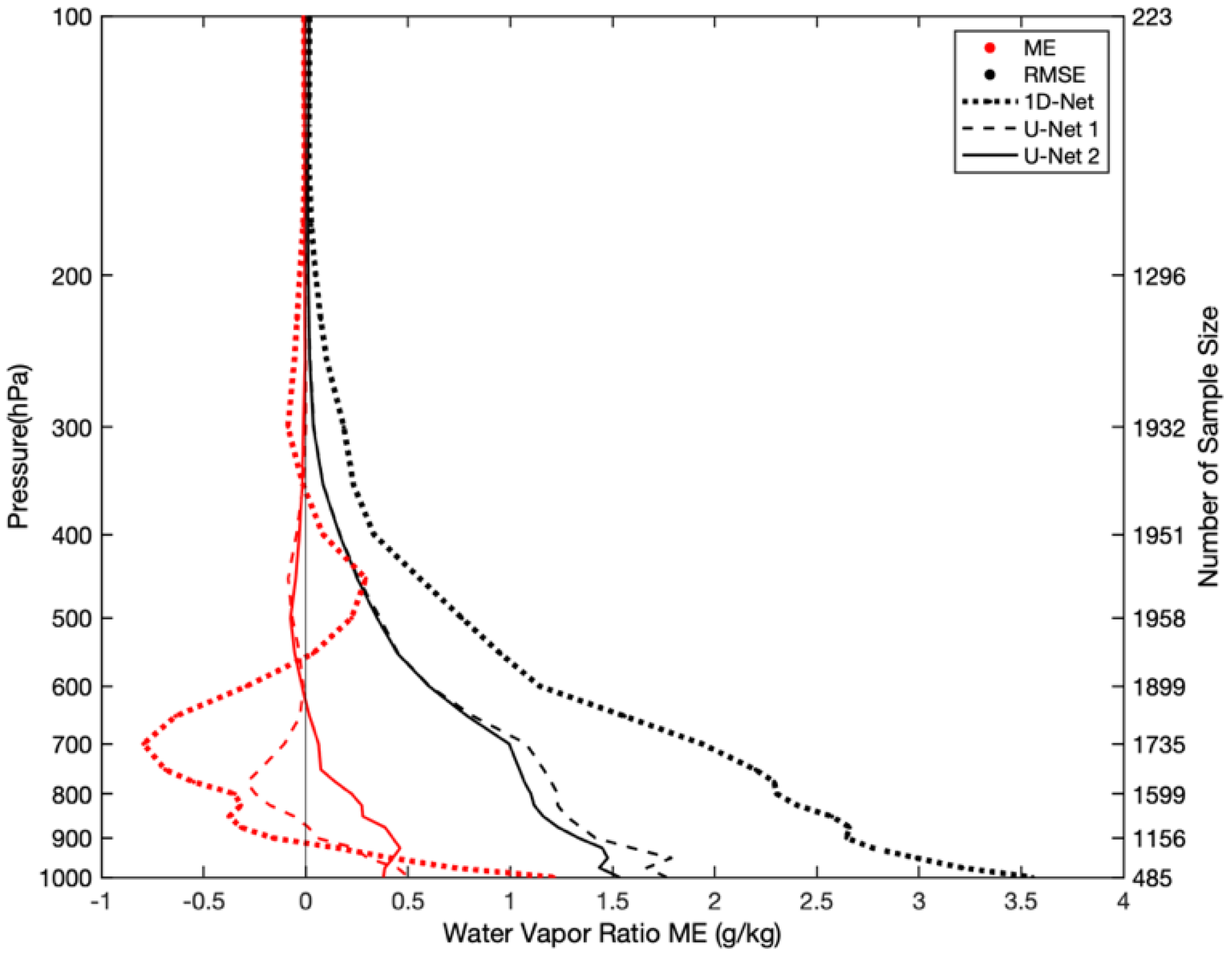
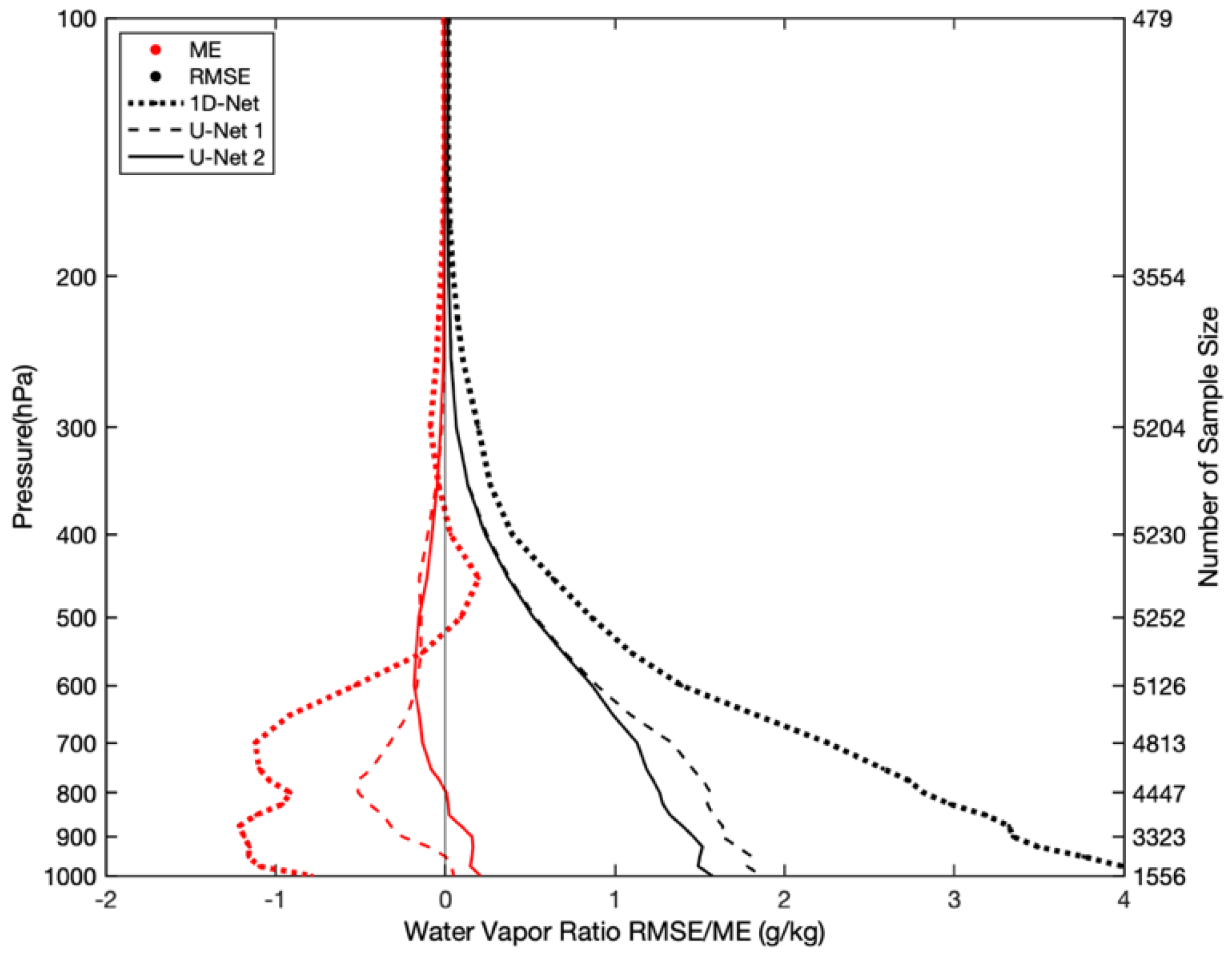
- Compared with the ERA5 reanalysis field and the GIIRS L2 operational products, the retrieval accuracy of the 1D-Net scheme needs to be improved, and the three-dimensional atmospheric temperature and humidity field retrieved by the two U-Net schemes are closer to the ERA5 reanalysis field in both distribution and value; in particular, U-Net 2 retrieval is more continuous in horizontal space.
- (2)
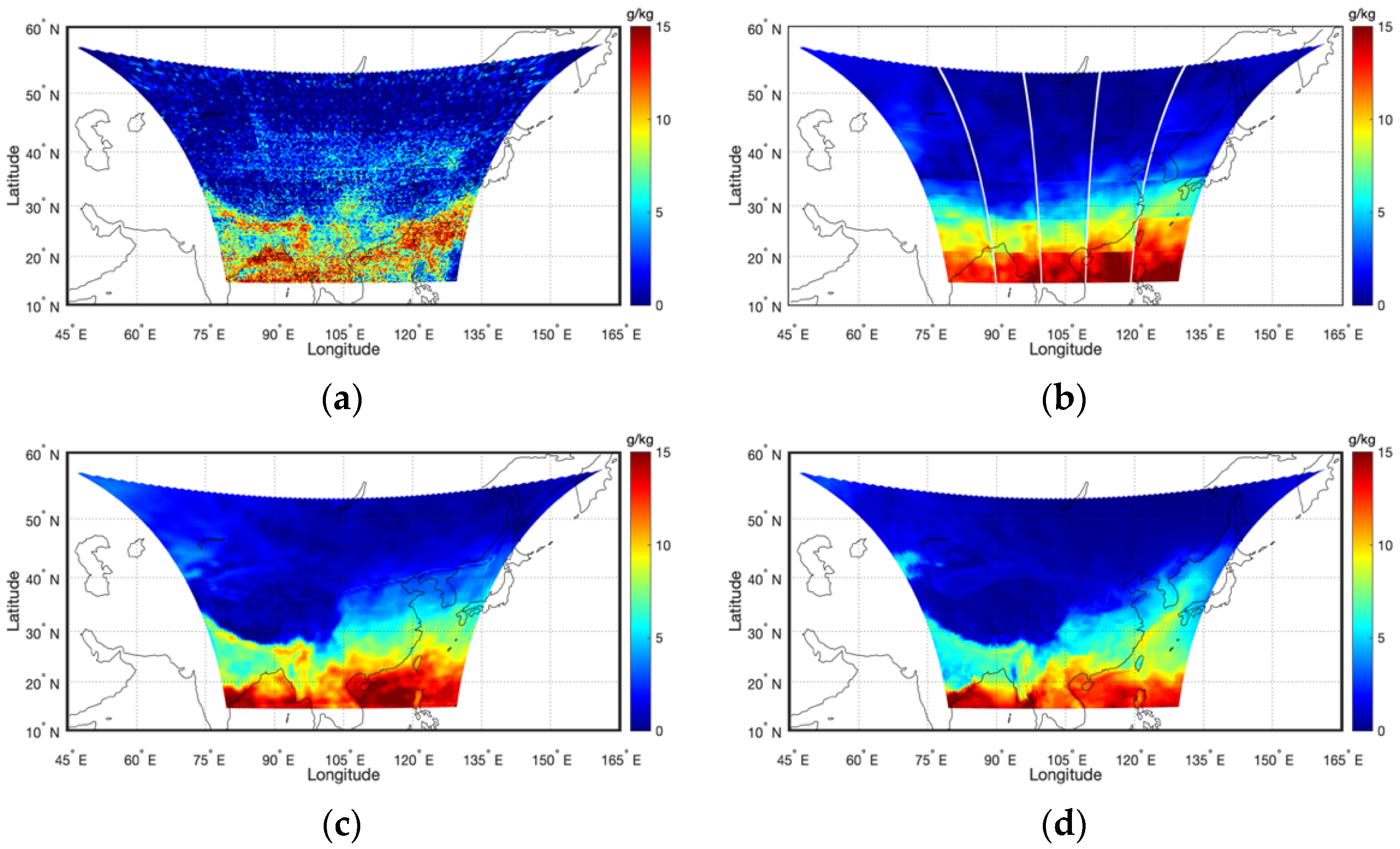
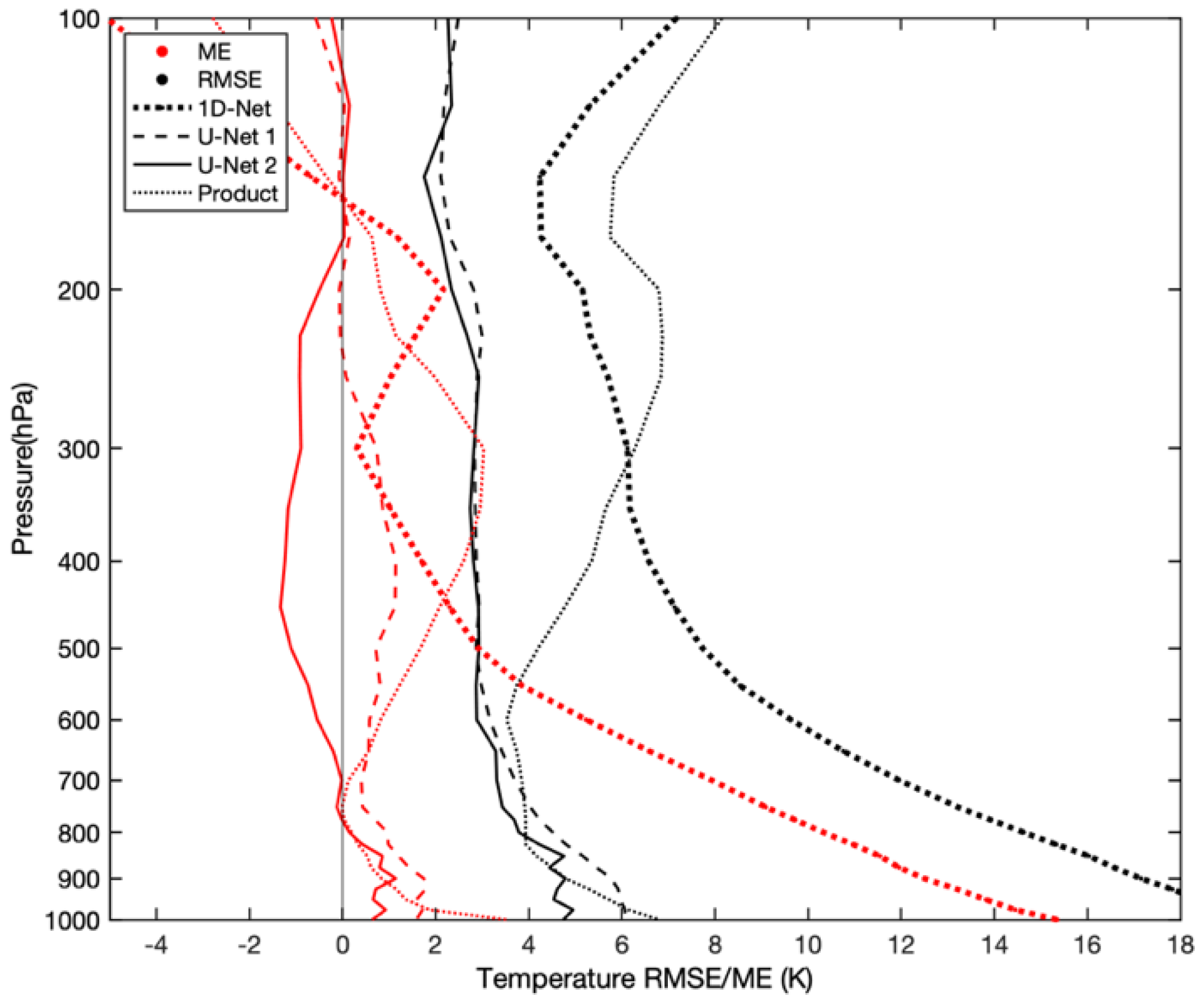
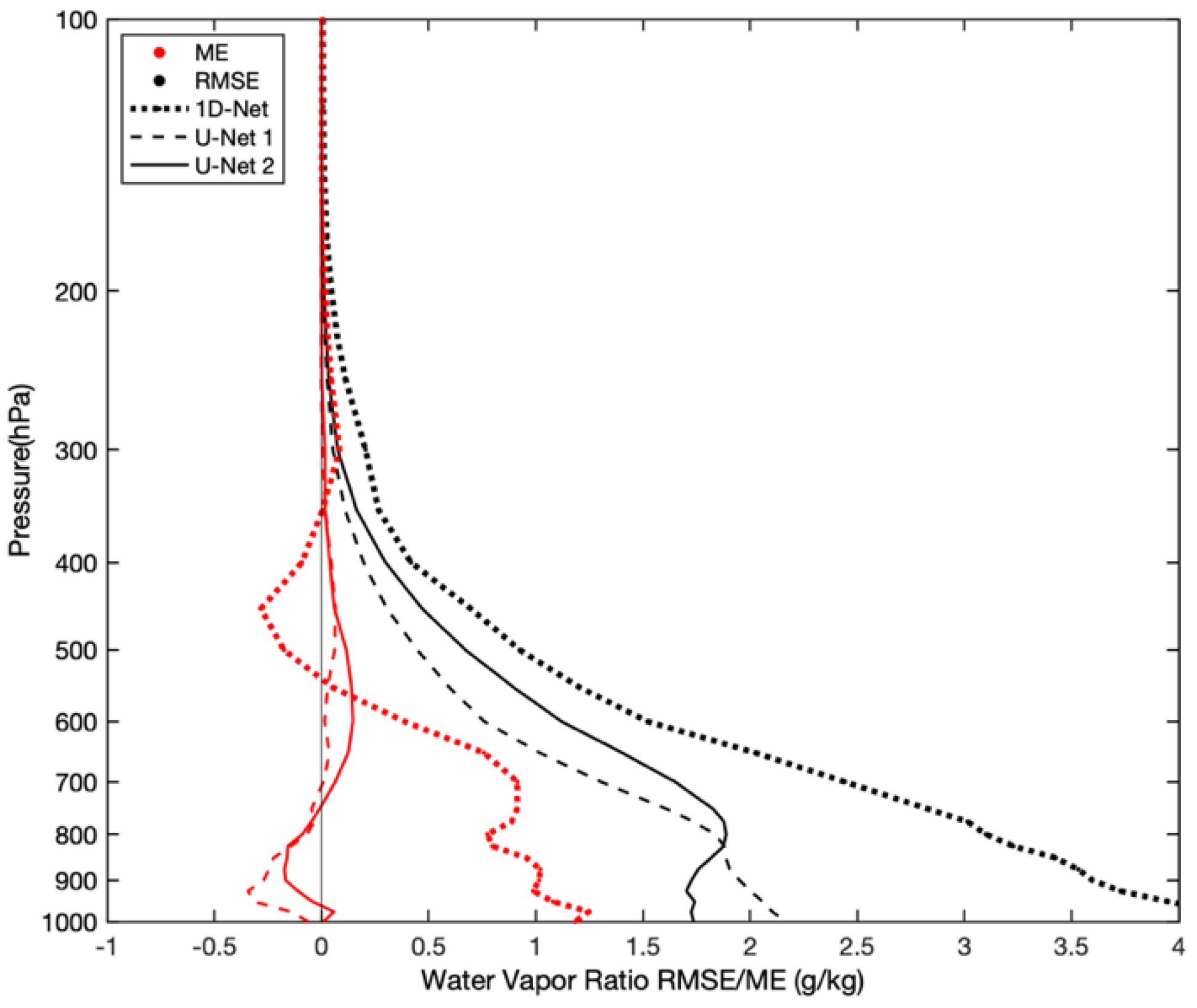
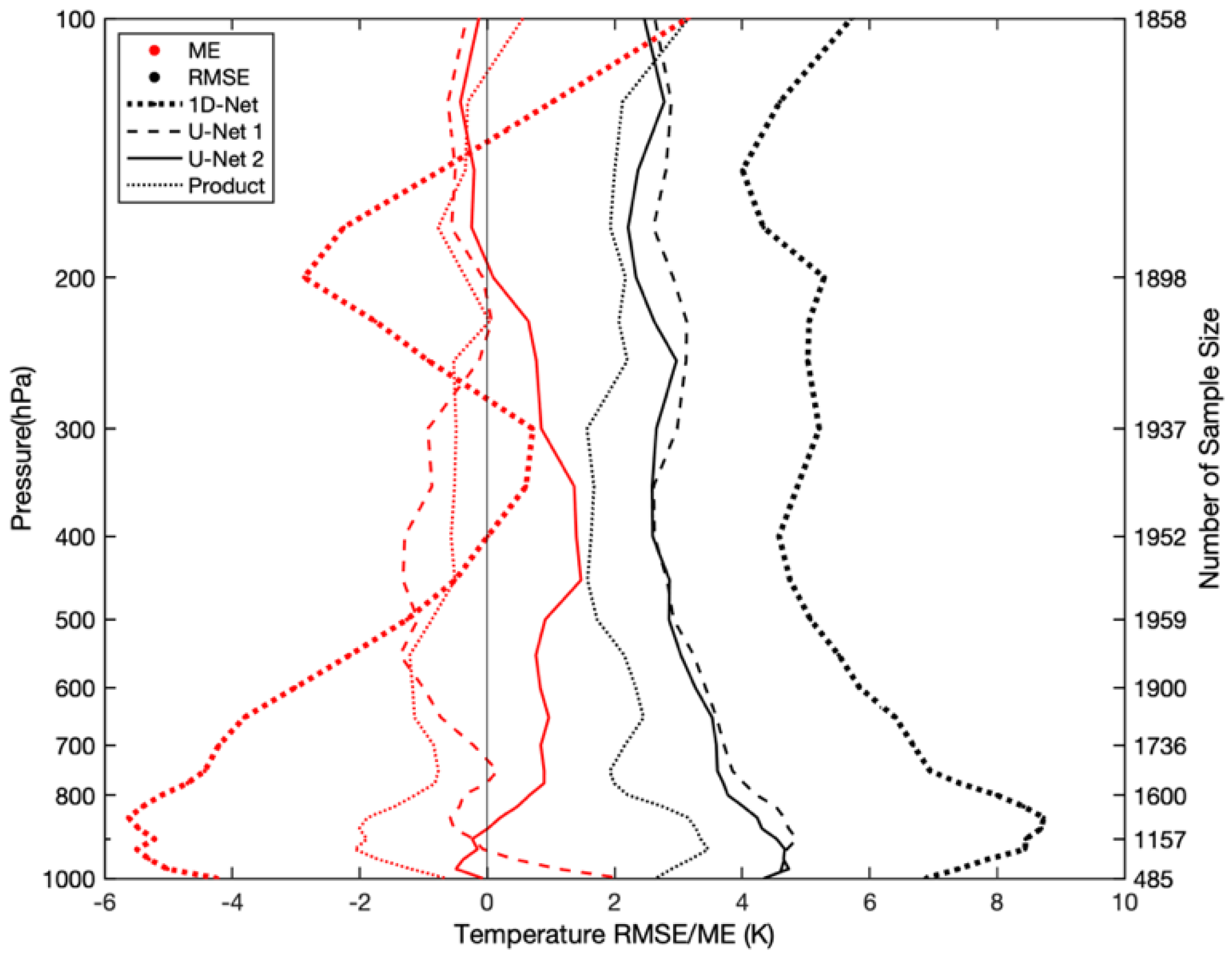
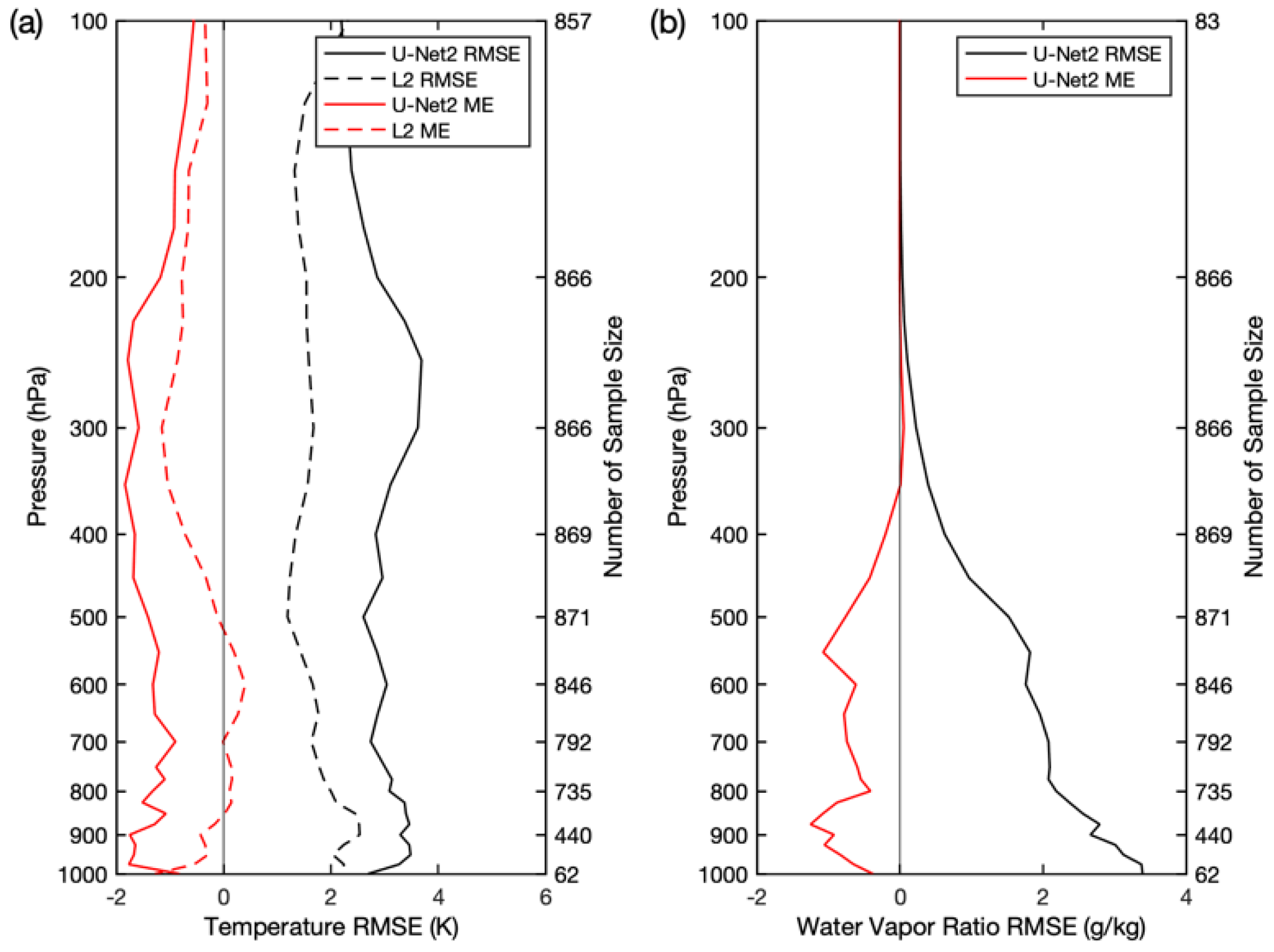
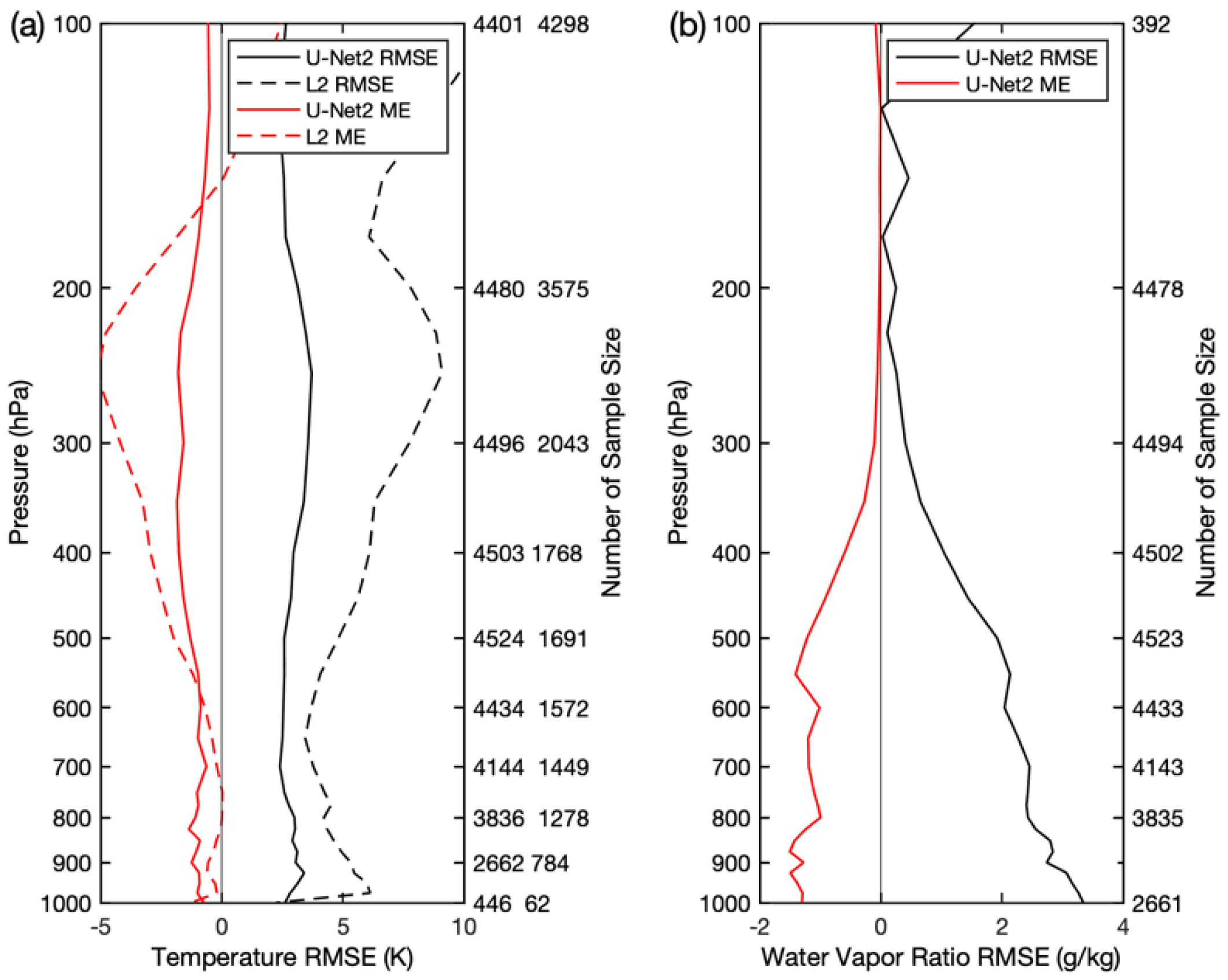
- The accuracy of L2 operational temperature products is the highest, the temperature retrieval RMSE for the two U-Net schemes is the second highest, and the RMSE and ME of the 1D-Net scheme are all larger compared with temporal-spatial matched radiosonde observations when the GIIRS field of view is completely clear. The temperature RMSE and bias of the two U-Net schemes under all sky conditions are lower than those of GIIRS L2 above 800 hPa, especially for the U-Net 2 scheme. The accuracy of the Level 2 temperature product will be reduced under the influence of clouds. The humidity RMSEs of the two U-Net schemes are within 2 g/kg, the 1D-Net scheme is worse, and humidity products are not provided by the L2 operational product.
- (3)
- The three deep learning convolutional neural network schemes all can retrieve 3D atmospheric temperature and humidity profiles for all the sky from the perspective of the image. The 1D-Net scheme only carries out retrieval of the vertical dimension for each field of view independently, with larger bias and discrete retrievals. The U-Net schemes use GIIRS multichannel spatial observations as input to improve the retrieval accuracy with cloud influence, and the retrieval fields are more continuous in horizontal distribution and closer to the actual atmosphere. The U-Net 2 scheme has the highest retrieval accuracy, followed by U-Net 1. The retrieval speed of the two U-Net schemes is nearly the same, faster than that of 1D-Net. The time required to retrieve the China area covered by the GIIRS is approximately 2–3 times longer than that of the U-Net schemes.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Li, J.; Li, J.; Otkin, J.; Schmit, T.J.; Liu, C.Y. Warning Information in a Preconvection Environment from the Geostationary Advanced Infrared Sounding System-A Simulation Study Using the IHOP Case. J. Appl. Meteorol. Climatol. 2011, 50, 776–783. [Google Scholar] [CrossRef]
- Li, J.; Fang, Z. The development of satellite meteorology-Challenges and Opportunities. Mettir. Mon. 2012, 38, 129–146. [Google Scholar]
- Yang, J.; Zhang, Z.; Wei, C.; Lu, F.; Guo, Q. Introducing the New Generation of Chinese Geostationary Weather Satellites, Fengyun-4. Bull. Am. Meteorol. Soc. 2017, 98, 1637–1658. [Google Scholar] [CrossRef]
- Geng, X.W.; Min, J.Z.; Yang, C.; Wang, Y.B.; Xu, D.M. Analysis of FY-4A AGRI Radiance Data Bias Characteristics and a Correction Experiment. Chin. J. Atmos. Sci. 2020, 44, 679–694. [Google Scholar] [CrossRef]
- Jiang, D.M.; Dong, C.H.; Lu, W.S. Preliminary Study on the Capacity of High Spectral Resolution Infrared Atmospheric Sounding Instrument Using AIRS Measurements. J. Remote Sens. 2006, 10, 586–592. [Google Scholar]
- Guan, L. Retrieving Atmospheric Profiles from MODIS/AIRS Observations. I. Eigenvector Regression Algorithms. J. Nanjing Inst. Meteorol. 2006, 6, 756–761. [Google Scholar] [CrossRef]
- Liu, H.; Dong, C.H.; Zhang, W.J.; Zhang, P. Retrieval of clear air atmospheric temperature profiles using AIRS observation. Acta Meteorol. Sin. 2006, 66, 513–519. [Google Scholar]
- Smith, W.L.; Weisz, E.; Kireev, S.V.; Zhou, D.K.; Li, Z.; Borbas, E.E. Dual-Regression Retrieval Algorithm for Real-Time Processing of Satellite Ultraspectral Radiances. J. Appl. Meteorol. Climatol. 2012, 51, 1455–1476. [Google Scholar] [CrossRef]
- Zhu, L.; Bao, Y.; Petropoulos, G.P.; Zhang, P.; Lu, F.; Lu, Q.; Wu, Y.; Xu, D. Temperature and Humidity Profiles Retrieval in a Plain Area from Fengyun-3D/HIRAS Sensor Using a 1D-VAR Assimilation Scheme. Remote Sens. 2020, 12, 435. [Google Scholar] [CrossRef]
- Xue, Q.; Guan, L.; Shi, X. One-Dimensional Variational Retrieval of Temperature and Humidity Profiles from the FY4A GIIRS. Adv. Atmos. Sci. 2022, 39, 471–486. [Google Scholar] [CrossRef]
- Singh, D.; Bhatia, R.C. Study of Temperature and Moisture Profiles Retrieved from Microwave and Hyperspectral Infrared Sounder Data Over Indian Regions. Indian J. Radio Space Phys. 2006, 35, 286–292. [Google Scholar]
- Malmgren-Hansen, D.; Laparra, V.; Nielsen, A.A.; Camps-Valls, G. Statistical Retrieval of Atmospheric Profiles with Deep Convolutional Neural Networks. ISPRS J. Photogramm. Remote Sens. 2019, 158, 231–240. [Google Scholar] [CrossRef]
- Zhang, S.; Guo, Y.H.; Wang, J.J. The development of deep convolution neural network and its applications on computer vision. Chin. J. Comput. 2019, 42, 453–482. [Google Scholar]
- Paoletti, M.E.; Haut, J.M.; Plaza, J.; Plaza, A. A New Deep Convolutional Neural Network for Fast Hyperspectral Image Classification. ISPRS J. Photogramm. Remote Sens. 2018, 145, 120–147. [Google Scholar] [CrossRef]
- Khurana, L.; Chauhan, A.; Naved, M.; Singh, P. Speech Recognition with Deep Learning. J. Phys. Conf. Ser. 2021, 1854, 012047. [Google Scholar] [CrossRef]
- Tan, J.; Chen, B.; Wang, W.; Yu, W.; Dai, W. Evaluating Precipitable Water Vapor Products From Fengyun-4A Meteorological Satellite Using Radiosonde, GNSS, and ERA5 Data. IEEE Trans. Geosci. Remote Sens. 2022, 60, 4106512. [Google Scholar] [CrossRef]
- Xu, W.; Wang, W.; Wang, N.; Chen, B. A New Algorithm for Himawari-8 Aerosol Optical Depth Retrieval by Integrating Regional PM₂.₅ Concentrations. IEEE Trans. Geosci. Remote Sens. 2022, 60, 4106711. [Google Scholar] [CrossRef]
- Saunders, R.; Hocking, J.; Turner, E.; Rayer, P.; Rundle, D.; Brunel, P.; Vidot, J.; Rocquet, P.; Matricardi, M.; Geer, A.; et al. An Update on the RTTOV Fast Radiative Transfer Model (Currently at Version 12). Geosci. Model Dev. 2018, 11, 2717–2737. [Google Scholar] [CrossRef]
- Zhu, L.; Li, J.; Zhao, Y.; Gong, H.; Li, W. Retrieval of Volcanic Ash Height from Satellite-Based Infrared Measurements: VOLCANIC ASH HEIGHT RETRIEVAL. J. Geophys. Res. Atmos. 2017, 122, 5364–5379. [Google Scholar] [CrossRef]
- Yao, S.H.; Guan, L. Atmospheric temperature and humidity profile retrievals using machine learning algorithm based on satellite-based infrared hyperspectral observations. Infrared Laser Eng. 2022, 51, 20210707. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Performance |
|---|---|
| Spectral bandwidth | Longwave: 700–1130 |
| Mid wave: 1650–2250 | |
| Spectral resolution | 0.625 |
| Spectral channels | Longwave: 689 |
| Mid wave: 961 | |
| Sensitivity | Longwave: 0.5–1.12 |
| Mid wave: 0.1–0.14 | |
| Spatial resolution | 16 km (the nadir) |
| Temporal resolution | 67 min (China area) |
| Spectral calibration accuracy | 10 ppm |
| Radiation calibration accuracy | 1.5 K |
| Model | Input Dimensions | Training Sample Size | Training Sample Size | Retrieval Time |
|---|---|---|---|---|
| 1D-Net | 225 × 1 | 1 × 101 | 11,528 pixels | 8′9″ |
| U-Net 1 | 32 × 32 × 225 | 32 × 32 × 37 | 4454 images | 3′27″ |
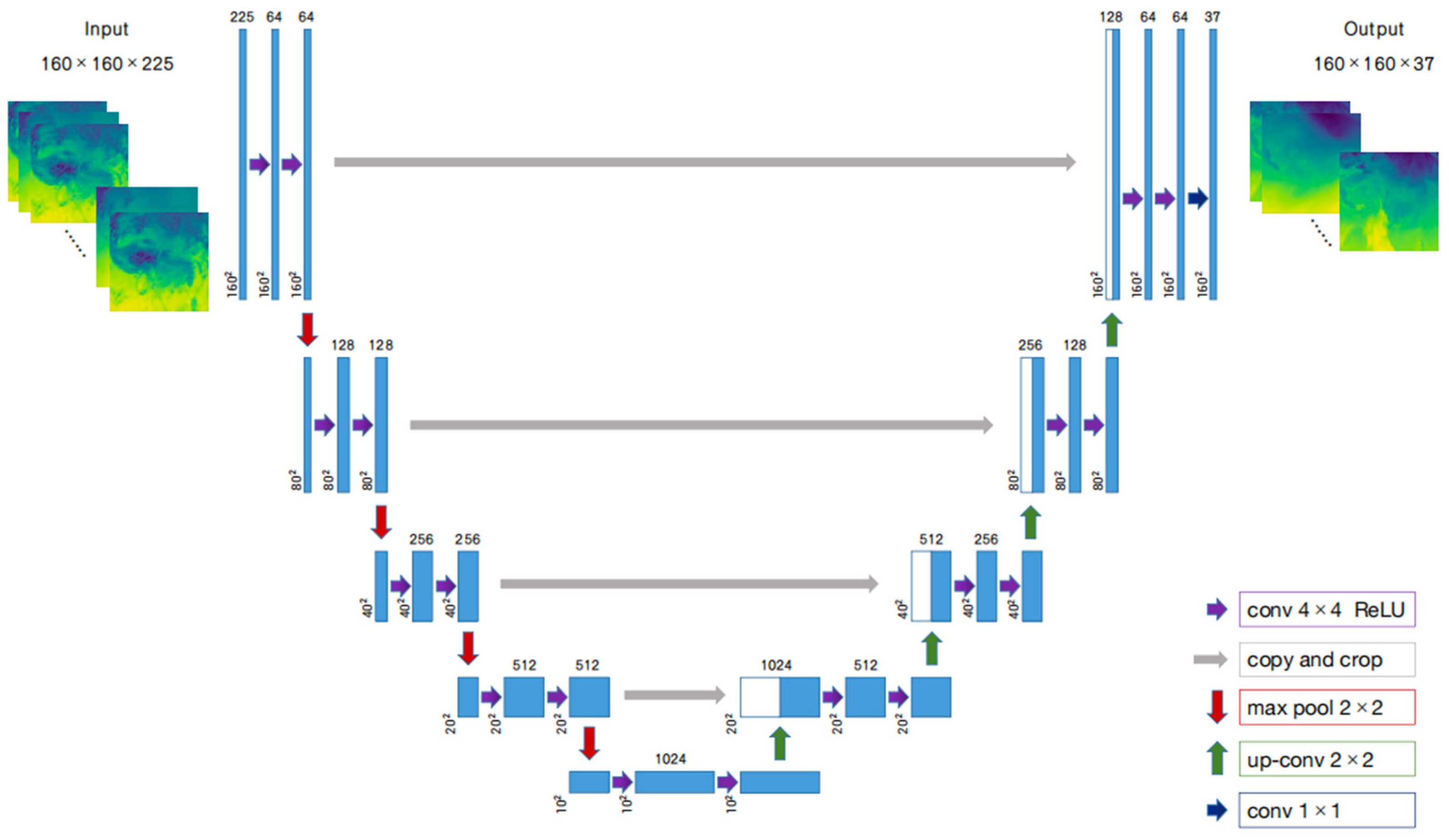
| U-Net 2 | 160 × 160 × 225 | 160 × 160 × 37 | 284 images | 3′9″ |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yao, S.; Guan, L. Comparison of Three Convolution Neural Network Schemes to Retrieve Temperature and Humidity Profiles from the FY4A GIIRS Observations. Remote Sens. 2022, 14, 5112. https://doi.org/10.3390/rs14205112
Yao S, Guan L. Comparison of Three Convolution Neural Network Schemes to Retrieve Temperature and Humidity Profiles from the FY4A GIIRS Observations. Remote Sensing. 2022; 14(20):5112. https://doi.org/10.3390/rs14205112
Chicago/Turabian StyleYao, Shuhan, and Li Guan. 2022. "Comparison of Three Convolution Neural Network Schemes to Retrieve Temperature and Humidity Profiles from the FY4A GIIRS Observations" Remote Sensing 14, no. 20: 5112. https://doi.org/10.3390/rs14205112
APA StyleYao, S., & Guan, L. (2022). Comparison of Three Convolution Neural Network Schemes to Retrieve Temperature and Humidity Profiles from the FY4A GIIRS Observations. Remote Sensing, 14(20), 5112. https://doi.org/10.3390/rs14205112