
Suppression of Jammer Multipath in GNSS Antenna Array Receiver


Abstract
:
1. Introduction
2. Mathematics Model
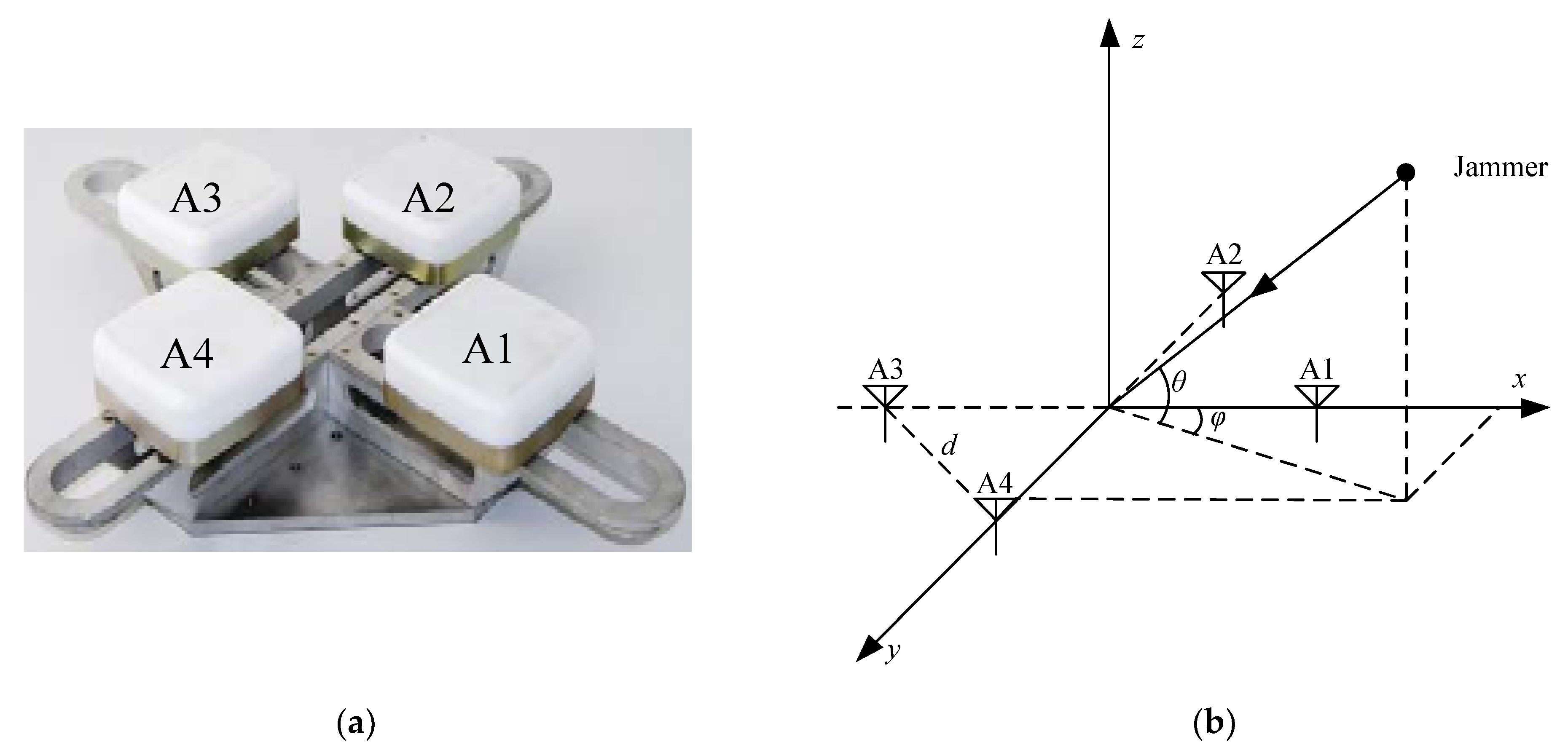
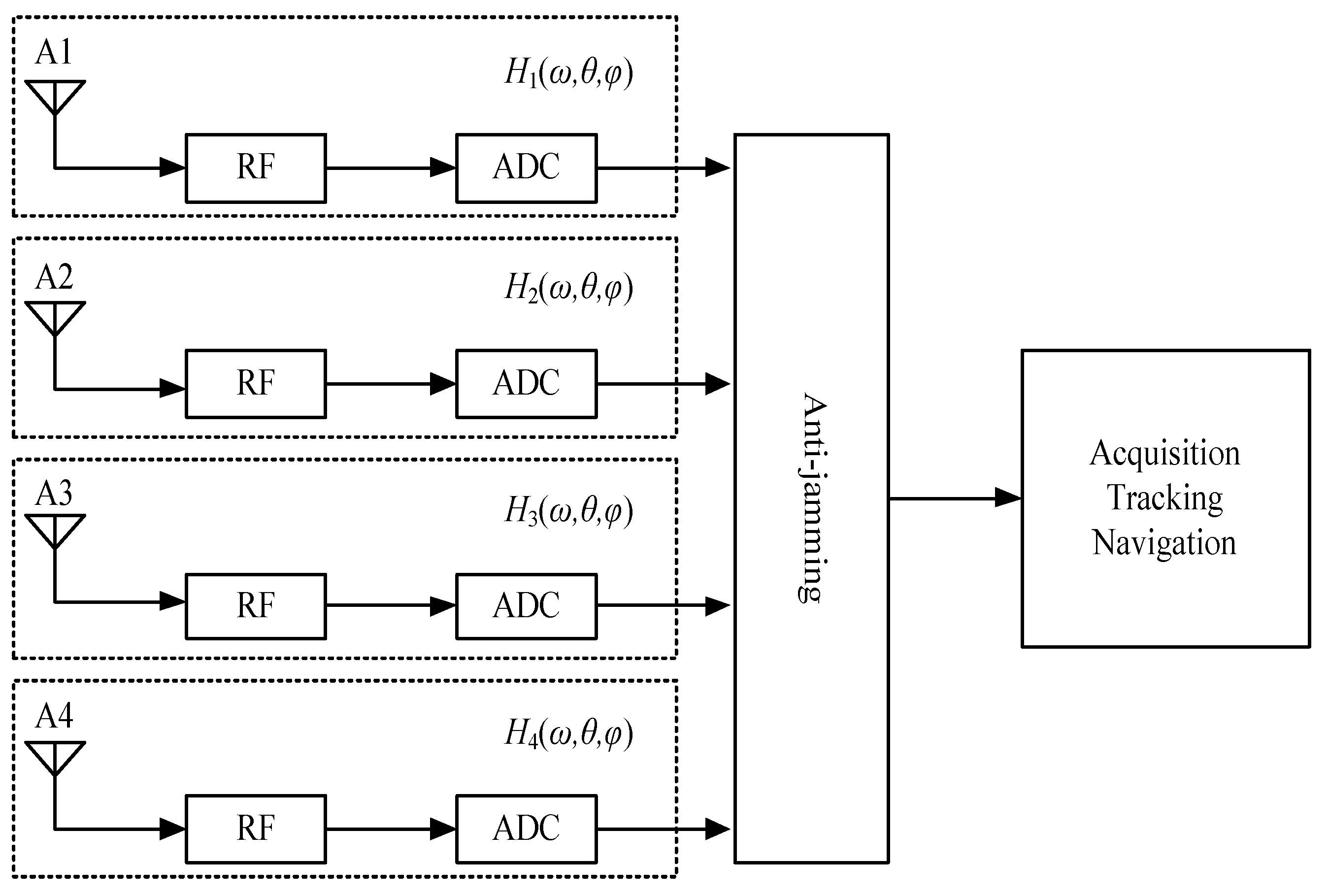
2.1. Array Model
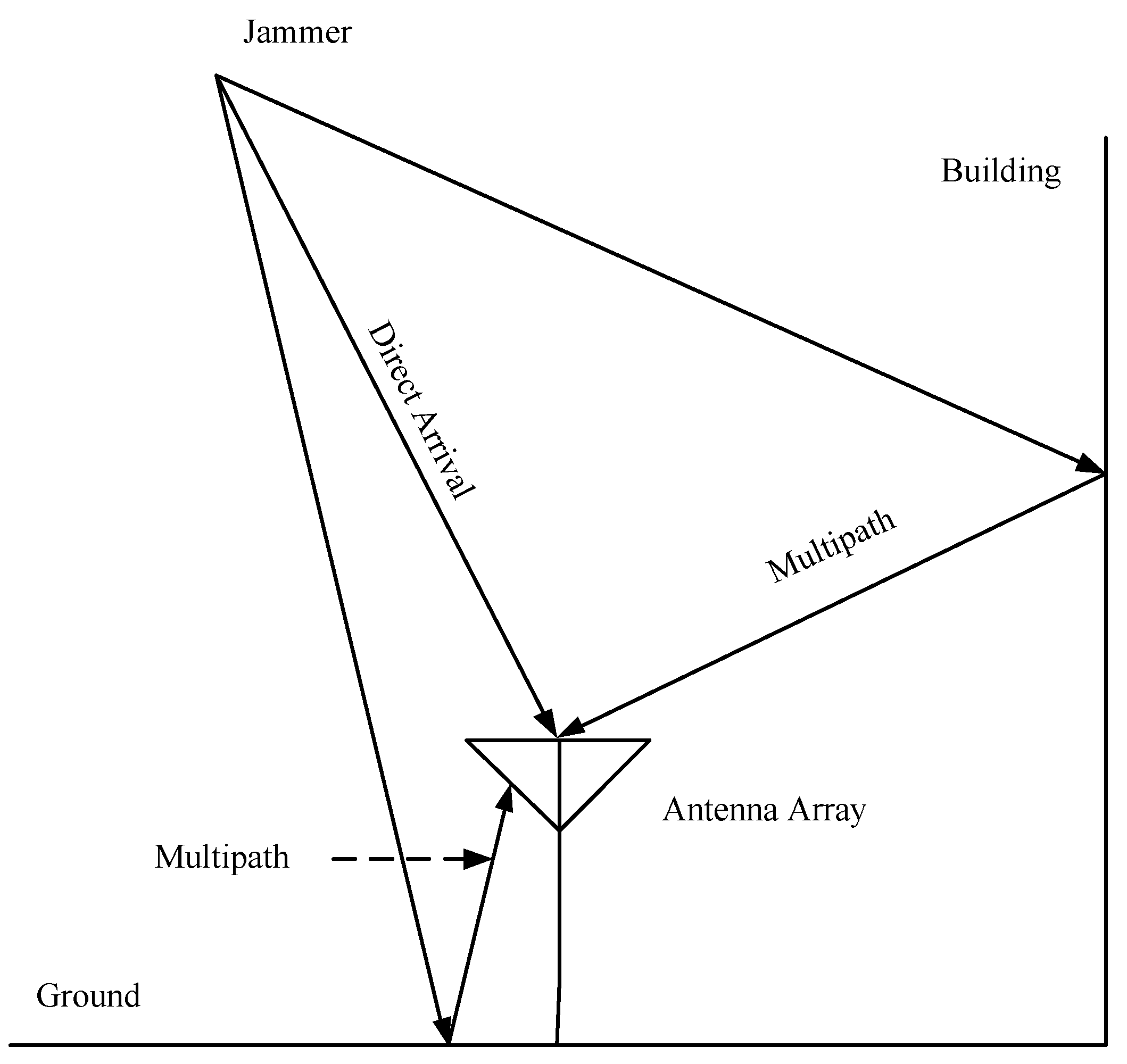
2.2. Jammer Multipath Model
3. Impact of Multipath on Anti-Jamming
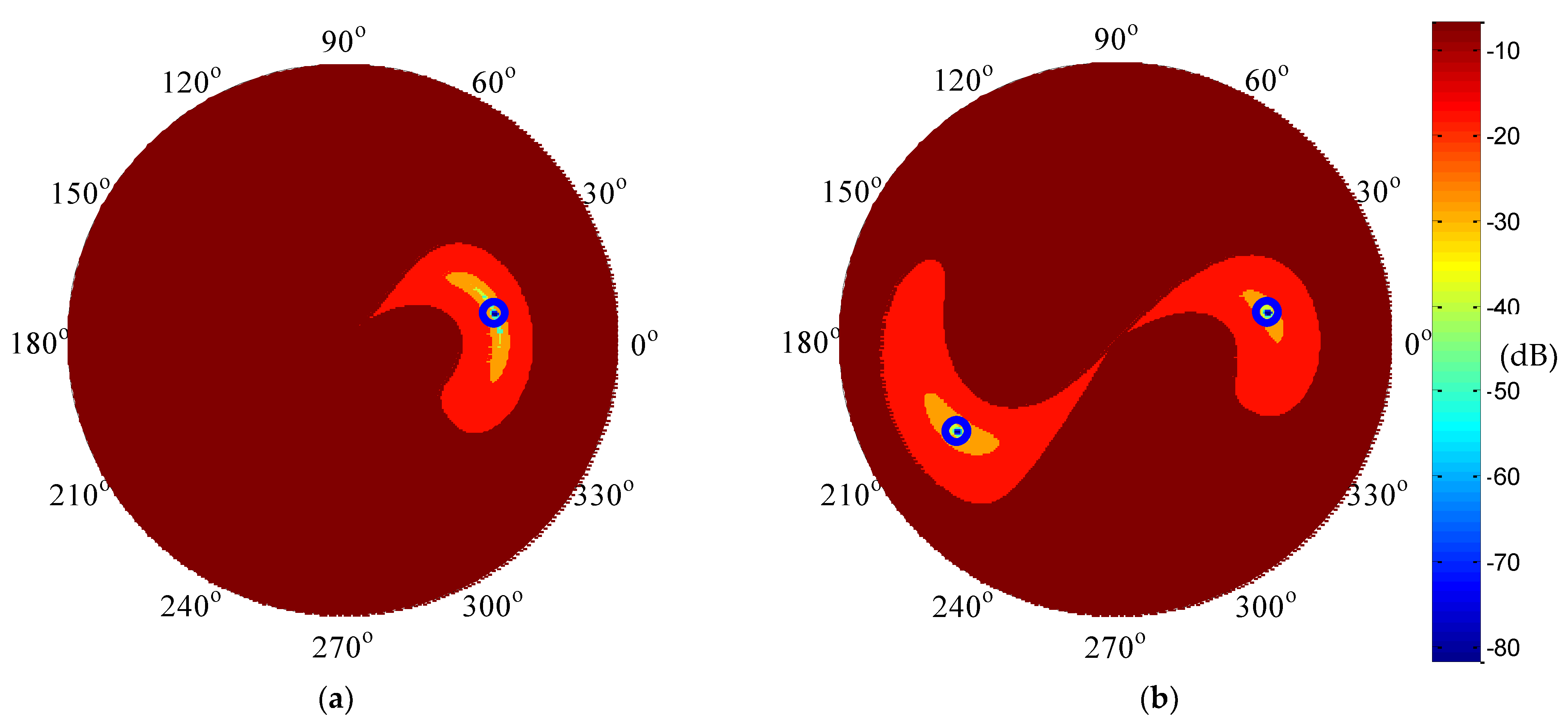
3.1. Space Only Processing
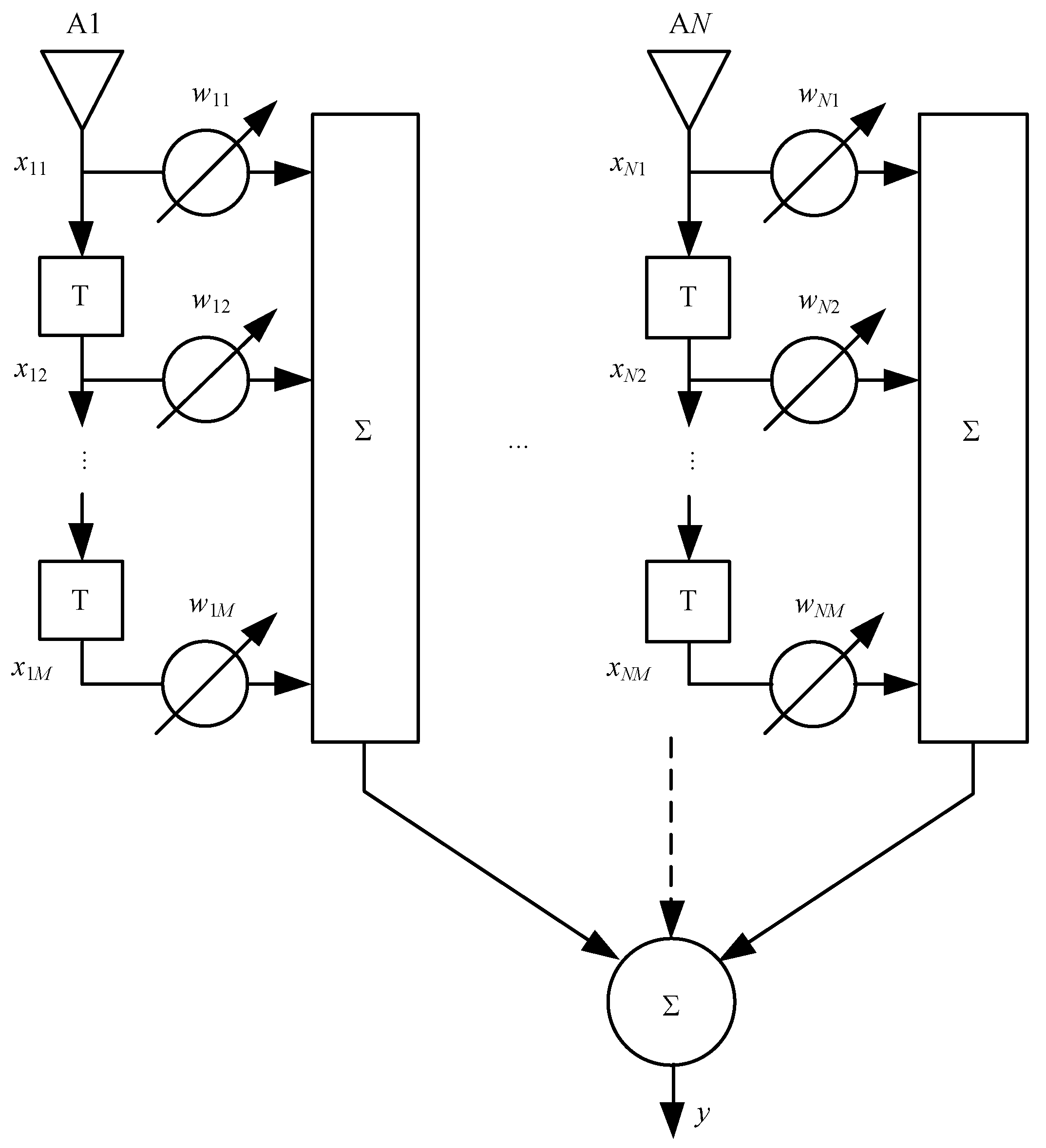
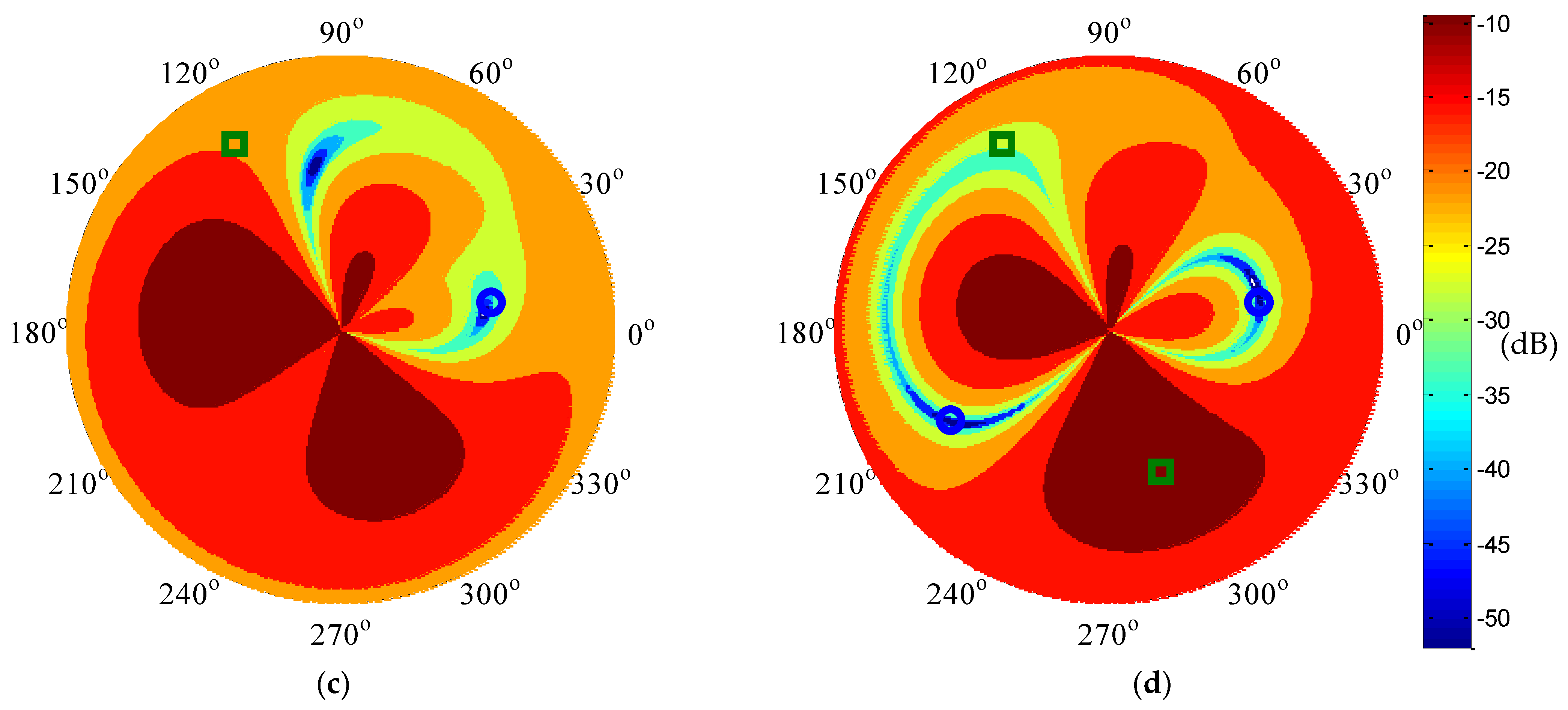
3.2. Space-Time Adaptive Processing
4. Simulation Experiments
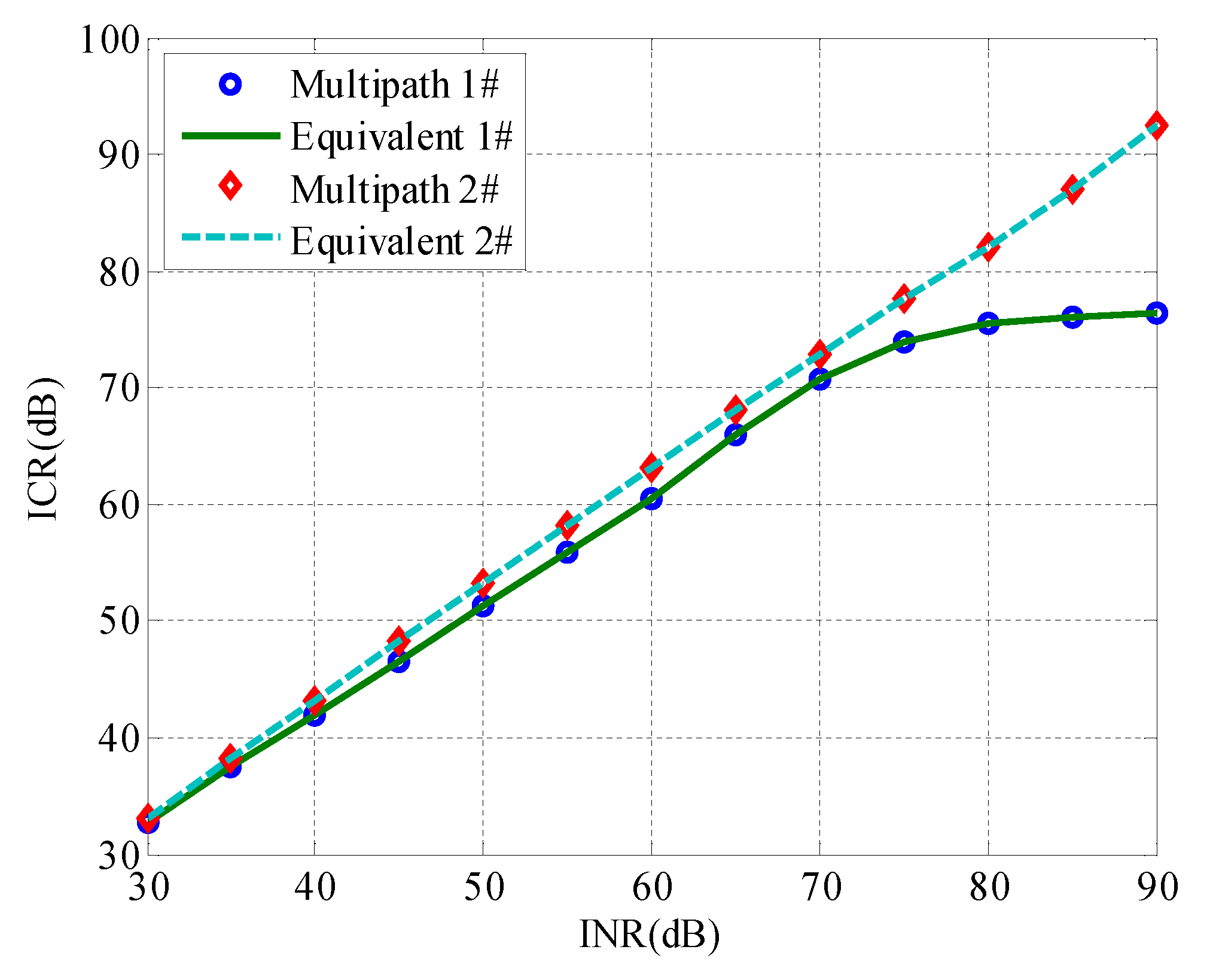
4.1. Verification for Equivalent Model
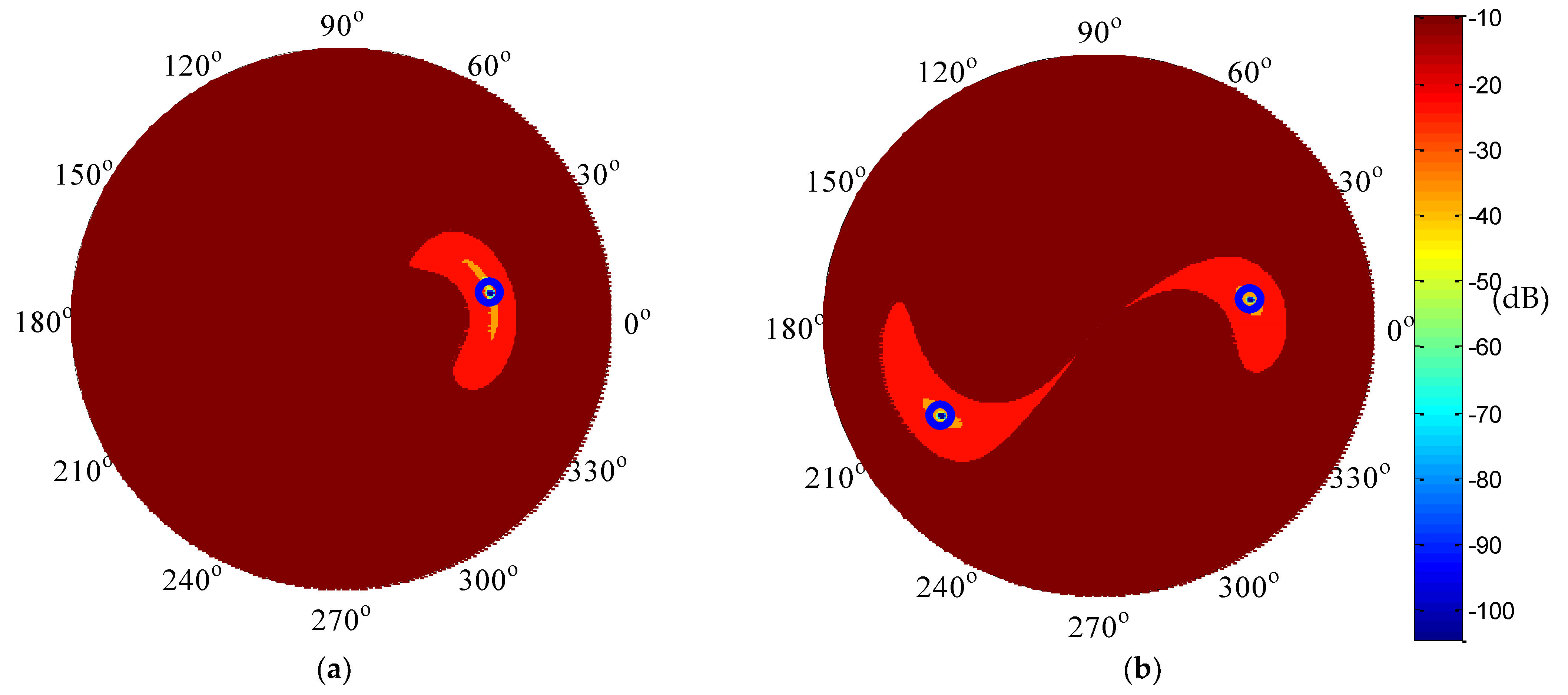
4.2. Simulation for SOP
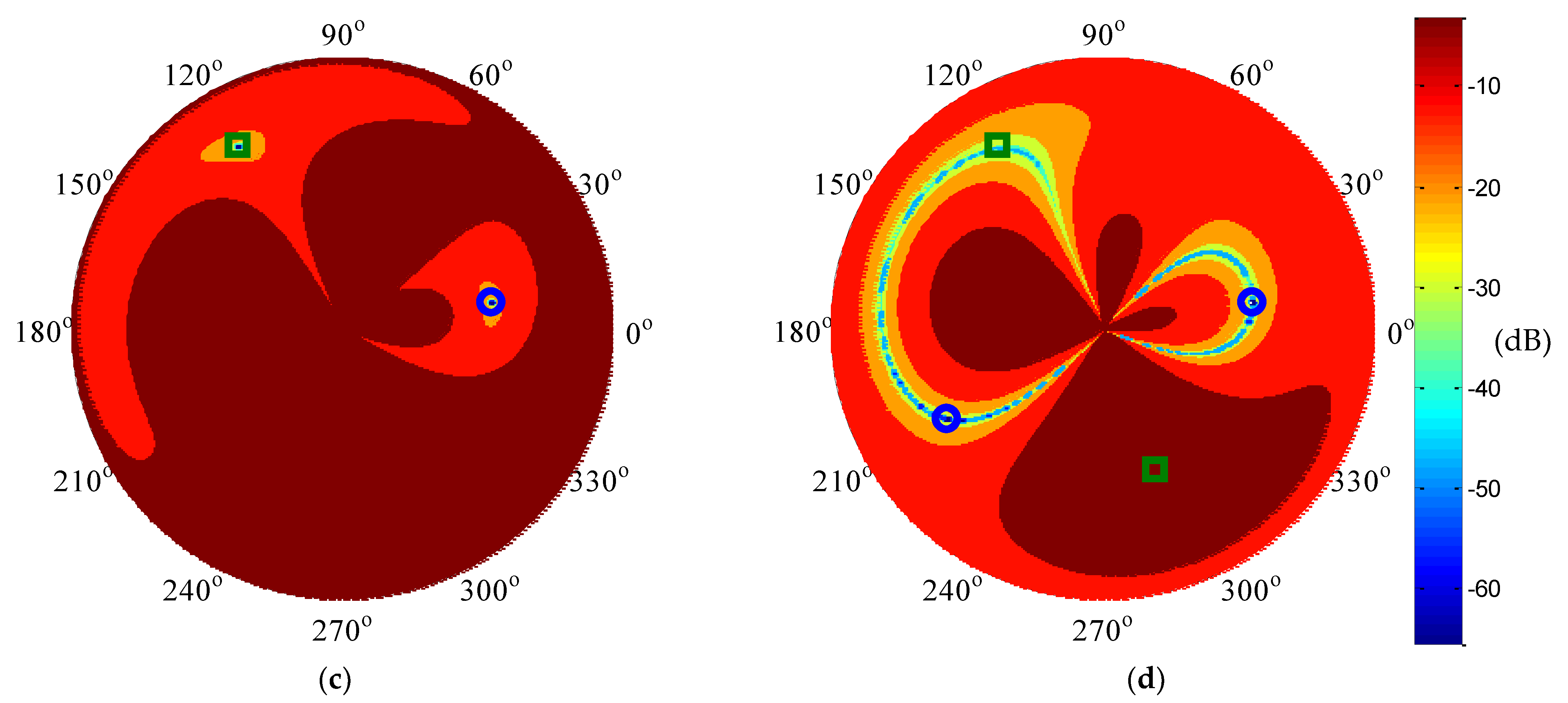
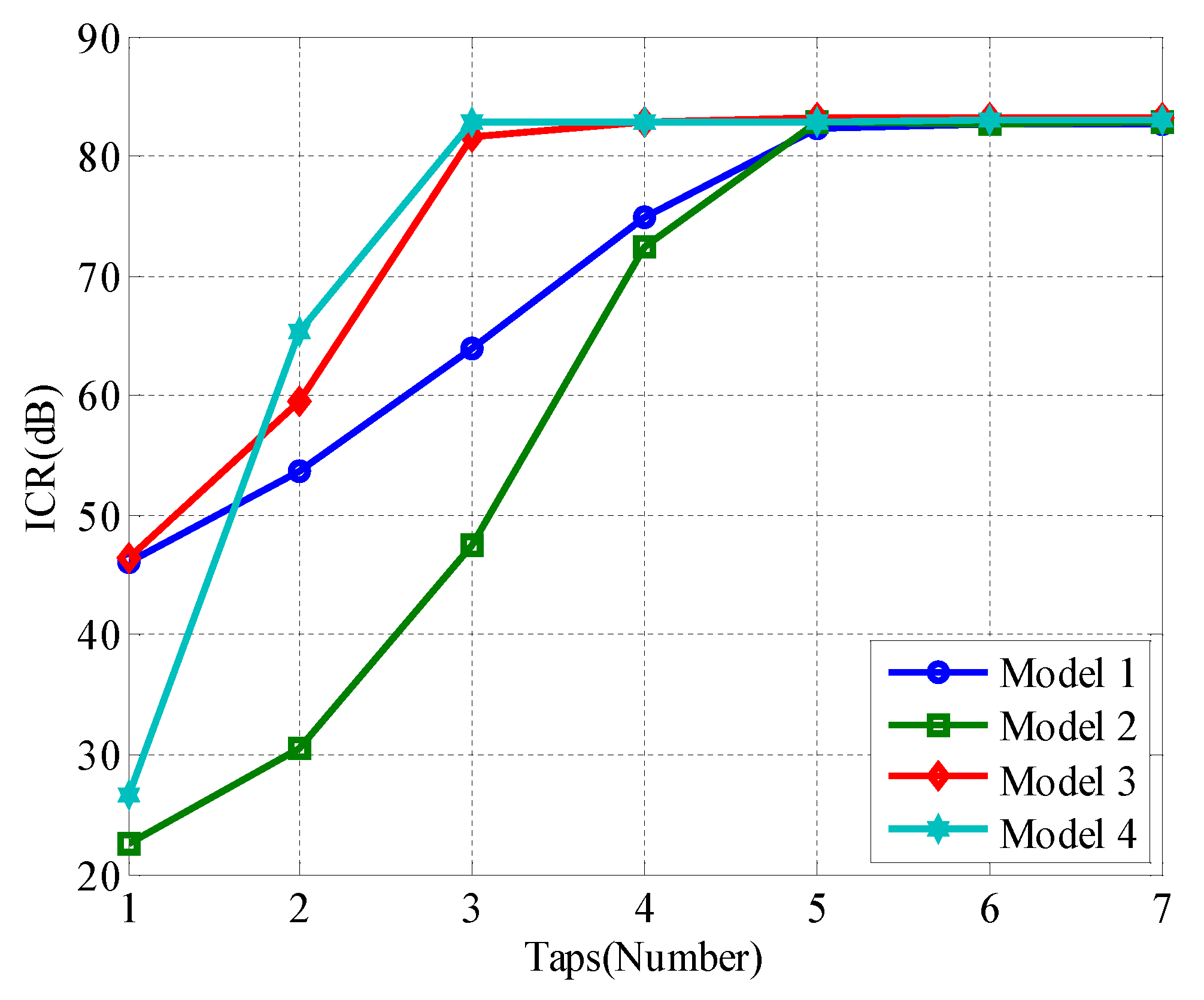
4.3. Simulation for STAP
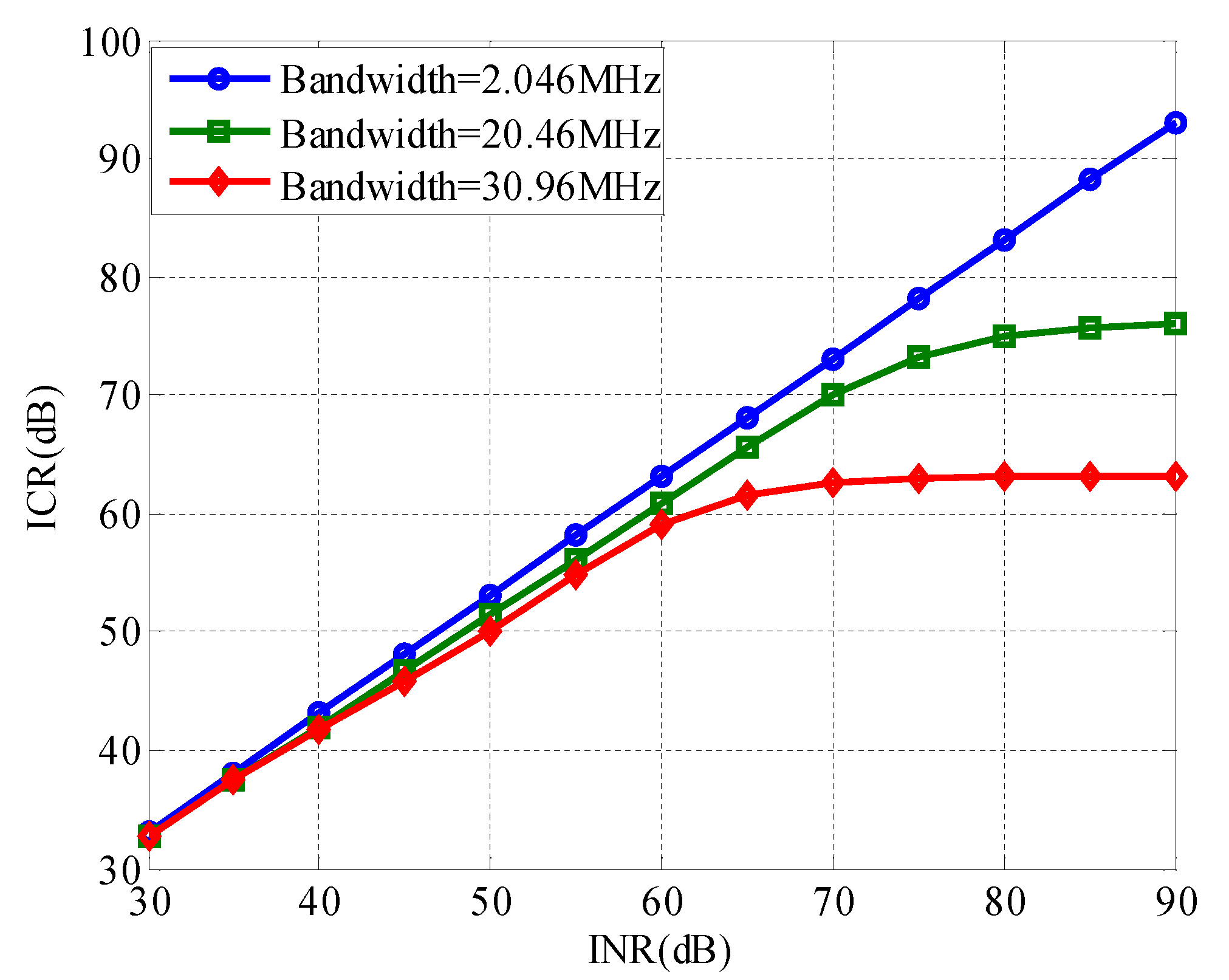
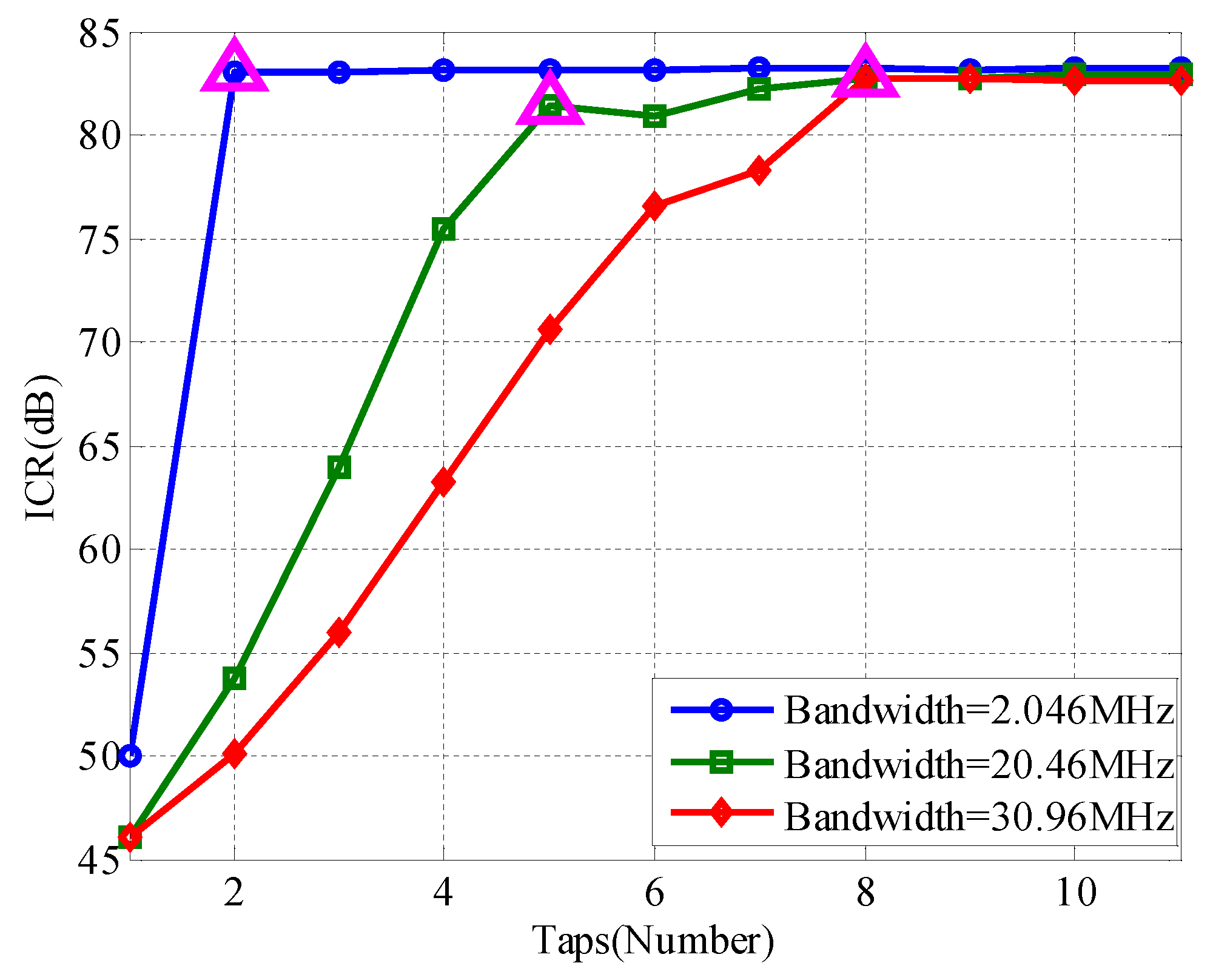
4.4. Impact of Bandwidth on Anti-Jamming
5. Conclusions
- (1)
- Interference multipath is equivalent to the direct interference through a filter, and multipath attenuation degree and delay are reflected in this filter. Direct interference and multipath interference have the same baseband signal, but the amplitude and the delay for these two interferences are different. The mix interference with direct and multipath interference can be equivalent to the direct interference through a filter.
- (2)
- Interference multipath would affect the performance of the SOP, which mainly reflects that the DoF would be a loss. When the sum number of the direct and multipath interference is still within the array DoF, the multipath would not affect the anti-jamming performance. The SOP could not distinguish the direct interference and multipath interference, and the multipath interference is seen as the direct interference.
- (3)
- The STAP can suppress the interference multipath, and its performance is related to the time-domain taps. Under the conditions allowed by hardware resources, increasing the taps can reduce the effect of interference multipath.
- (4)
- Under the same multipath model and anti-jamming condition, the interference bandwidth is wider, and the interference suppression is more difficult. However, the STAP with more taps may equalize the difference.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Ladina, S.; Michael, M.; Christoph, M. Impact of GPS processing on the estimation of snow water equivalent using refracted GPS signals. IEEE Trans. Geosci. Remote Sens. 2020, 58, 123–135. [Google Scholar]
- Zhang, P.; Tu, R.; Zhang, R.; Gao, Y.; Cai, H. Combining GPS, BeiDou, and Galileo Satellite Systems for Time and Frequency Transfer Based on Carrier Phase Observations. Remote Sens. 2018, 10, 324. [Google Scholar] [CrossRef] [Green Version]
- Chen, H.; Niu, F.; Su, X.; Gegn, T.; Liu, Z.; Li, Q. Initial Results of Modeling and Improvement of BDS-2/GPS Broadcast Ephemeris Satellite Orbit Based on BP and PSO-BP Neural Networks. Remote Sens. 2021, 13, 4801. [Google Scholar] [CrossRef]
- Mohamed, T.; Michael, J.; Haidy, E.; Aboelmagd, N. GPS Swept Anti-Jamming Technique Based on Fast Orthogonal Search (FOS). Remote Sens. 2021, 21, 3706. [Google Scholar] [CrossRef]
- Lu, Z.; Chen, F.; Xie, Y.; Sun, Y.; Cai, H. High Precision Pseudo-Range Measurement in GNSS Anti-jamming Antenna Array Processing. Electronics 2020, 9, 412. [Google Scholar] [CrossRef] [Green Version]
- Xu, W.; Xing, W.; Fang, C.; Huang, P.; Tan, W.; Gao, Z. RFI Suppression for SAR Systems Based on Removed Spectrum Iterative Adaptive Approach. Remote Sens. 2020, 12, 3520. [Google Scholar] [CrossRef]
- Bertold, V.D.B.; Sofie, P. Keeping UAVs under control during GPS jamming. IEEE Syst. J. 2019, 13, 2010–2021. [Google Scholar]
- Jalal, B.; Yang, X.; Liu, Q. Fast and Robust Variable-Step-Size LMS Algorithm for Adaptive Beamforming. IEEE Antennas Wirel. Propag. Lett. 2020, 19, 1206–1210. [Google Scholar] [CrossRef]
- Zhang, Y.D.; Amin, M.G. Anti-Jamming GPS Receiver with Reduced Phase Distortions. IEEE Signal Process. Lett. 2012, 19, 635–638. [Google Scholar] [CrossRef]
- Song, J.; Lu, Z.; Xiao, Z.; Li, B.; Sun, G. Optimal Order of Time-Domain Adaptive Filter for Anti-jamming Navigation Receiver. Remote Sens. 2022, 14, 48. [Google Scholar] [CrossRef]
- Marathe, T.; Daneshmand, S.; Lachapelle, G. Assessment of Measurement Distortions in GNSS Antenna Array Space-Time Processing. Int. J. Antennas Propag. 2016, 2, 2154763. [Google Scholar] [CrossRef]
- Lu, Z.; Chen, H.; Chen, F.; Nie, J.; Ou, G. Blind Adaptive Channel Mismatch Equalization Method for GNSS Antenna Arrays. IET Radar Sonar Navig. 2018, 12, 383–389. [Google Scholar] [CrossRef]
- Xie, Y.; Li, Z.; Chen, F.; Chen, H.; Wang, F. The Unbiased Characteristic of Doppler Frequency in GNSS Antenna Array Processing. Int. J. Antennas Propag. 2019, 2019, 5302401. [Google Scholar] [CrossRef]
- Fante, R.L.; Vacarro, J.J. Cancellation of Jammers and Jammer Multipath in a GPS Receiver. IEEE Trans. Aerosp. Electron. Syst. Mag. 1998, 11, 25–28. [Google Scholar] [CrossRef]
- Kogon, S.M.; Williams, D.B.; Holder, E.J. Exploiting coherent multipath for mainbeam jammer suppression. IET Radar Sonar Navig. 1998, 145, 303–308. [Google Scholar] [CrossRef]
- Fante, R.L.; Torres, J.A. Cancellation of Diffuse Jammer Multipath by an Airborne Adaptive Radar. IEEE Trans. Aerosp. Electron. Syst. 1995, 31, 805–820. [Google Scholar] [CrossRef]
- Lu, Z.; Nie, J.; Chen, F.; Ou, G. Impact on Anti-jamming Performance of Channel Mismatch in GNSS Antenna Arrays Receivers. Int. J. Antennas Propag. 2016, 2016, 1909708. [Google Scholar] [CrossRef]
- Caizzone, S.; Buchner, G.; Elmarissi, W. Miniaturized dielectric resonator antenna array for GNSS applications. Int. J. Antennas Propag. 2016, 2016, 2564087. [Google Scholar] [CrossRef]
- Chen, F.; Nie, J.; Li, Z.; Wang, F. Multitone-based Non-linear Phase Variation Estimation for Analog Front-Ends in GNSS Receivers. China Satell. Navig. Conf. 2014, 1, 619–627. [Google Scholar]
- Lu, Z.; Nie, J.; Wan, Y.; Ou, G. Optimal reference element for interference suppression in GNSS antenna arrays under channel mismatch. IET Radar Sonar Navig. 2017, 11, 1161–1169. [Google Scholar] [CrossRef]
- Sara, J.H.; Nagaraj, C.S.; Dennis, M.A. Fitlering and quantization effects on GNSS successive interference cancellation. IEEE Trans. Aerosp. Electron. Syst. 2020, 56, 924–936. [Google Scholar]
- Chen, F.; Nie, J.; Li, B.; Wang, F. Distortionless space-time adaptive processor for GNSS receiver. Electron. Lett. 2015, 51, 2138–2139. [Google Scholar] [CrossRef]
- Fante, R.L.; Vaccaro, J.J. Wideband Cancellation of Interference in a GPS Receive Array. IEEE Trans. Aerosp. Electron. Syst. 2000, 36, 549–564. [Google Scholar] [CrossRef]
- Compton, R.T. The power-inversion adaptive array: Concept and performance. IEEE Trans. Aerosp. Electron. Syst. 1979, 15, 803–814. [Google Scholar] [CrossRef]
- Lu, Z.; Nie, J.; Chen, F.; Chen, H.; Ou, G. Adaptive Time Taps of STAP Under Channel Mismatch for GNSS Antenna Arrays. IEEE Trans. Instrum. Meas. 2017, 66, 2813–2824. [Google Scholar] [CrossRef]
- Liu, Y.; Cao, Y.; Tang, C.; Chen, J.; Zhao, L.; Zhou, S.; Hu, X.; Tian, Q.; Yang, Y. Pseudorange Bias Analysis and Preliminary Service Performance Evaluation of BDSBAS. Remote Sens. 2021, 13, 4815. [Google Scholar] [CrossRef]
- Alexandre, M.; Alvaro, S.; Jean-Paul, B.; Félix, P.; Sylvain, L. Analysis of GNSS Displacements in Europe and Their Comparison with Hydrological Loading Models. Remote Sens. 2021, 21, 4523. [Google Scholar]
- Xue, B.; Wang, H.; Yuan, Y. Performance of BeiDou-3 signal-in-space ranging errors: Accuracy and distribution. GPS Solut. 2021, 25, 23. [Google Scholar] [CrossRef]
- Zhang, Z.; Li, B.; Nie, L. Initial assessment of BeiDou-3 global navigation satellite system: Signal quality, RTK and PPP. GPS Solut. 2019, 23, 24. [Google Scholar] [CrossRef]
- Zhang, Y.; Kubo, N.; Chen, J.; Wang, J.; Wang, H. Initial Positioning Assessment of BDS New Satellites and New Signals. Remote Sens. 2019, 11, 1320. [Google Scholar] [CrossRef] [Green Version]
- Yang, H.; Zhou, B.; Wang, L.; Wei, Q.; Ji, F.; Zhang, R. Performance and Evaluation of GNSS Receiver Vector Tracking Loop Based on Adaptive Cascade Filter. Remote Sens. 2021, 13, 1477. [Google Scholar] [CrossRef]
- Zhou, Q.; Zheng, H.; Wu, X.; Yue, X.; Chen, Z.; Wang, Q. Fractional Fourier Transform-Based Radio Frequency Interference Suppression for High-Frequency Surface Wave Radar. Remote Sens. 2020, 12, 75. [Google Scholar] [CrossRef] [Green Version]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Type | Parameter Value |
|---|---|
| Antenna array type | four-element square |
| Sampling frequency | 62 MHz |
| Intermediate frequency | 15 MHz |
| Jammer type | Gaussian white noise |
| Jammer #1 DOA | (10°, 40°) |
| Jammer #2 DOA | (210°, 30°) |
| Multipath #1 decay | 0.1 |
| Multipath #2 decay | 0.01 |
| Multipath #1 delay | 100 ns |
| Multipath #2 delay | 200 ns |
| Multipath #1 DOA | (120°, 20°) |
| Multipath #2 DOA | (290°, 40°) |
| Model 1# | Model 2# | |
|---|---|---|
| Amplitude | (0.1, 0.01) | (0.05, 0.2) |
| Delay (ns) | (100, 200) | (20, 60) |
| INR (dB) | ICR (dB) | |
|---|---|---|
| One interference without multipath | 80 | 80 |
| Two interferences without multipath | 83 | 83 |
| One interference with multipath | 80 | 80 |
| Two interferences with multipath | 83 | 39 |
| Model 1 | Model 2 | Model 3 | Model 4 | |
|---|---|---|---|---|
| Amplitude | (0.1, 0.01) | (0.05, 0.2) | (0.1, 0.01) | (0.05, 0.2) |
| Delay (ns) | (100, 200) | (100, 200) | (20, 60) | (20, 60) |
| INR (dB) | ICR (dB) | |
|---|---|---|
| One interference without multipath | 80 | 80 |
| Two interferences without multipath | 83 | 83 |
| One interference with multipath | 80 | 80 |
| Two interferences with multipath | 83 | 82 |
| Parameter Type | Parameter Value |
|---|---|
| Jammer number | 2 |
| Jammer DOA | (10°, 40°) and (210°, 30°) |
| Multipath number | 2 |
| Multipath amplitude | 0.1 and 0.01 |
| Multipath delay | 100 ns and 200 ns |
| Multipath DOA | (120°, 20°) and (290°, 40°) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, L.; Lu, Z.; Xiao, Z.; Ren, C.; Song, J.; Li, B. Suppression of Jammer Multipath in GNSS Antenna Array Receiver. Remote Sens. 2022, 14, 350. https://doi.org/10.3390/rs14020350
Huang L, Lu Z, Xiao Z, Ren C, Song J, Li B. Suppression of Jammer Multipath in GNSS Antenna Array Receiver. Remote Sensing. 2022; 14(2):350. https://doi.org/10.3390/rs14020350
Chicago/Turabian StyleHuang, Long, Zukun Lu, Zhibin Xiao, Chao Ren, Jie Song, and Baiyu Li. 2022. "Suppression of Jammer Multipath in GNSS Antenna Array Receiver" Remote Sensing 14, no. 2: 350. https://doi.org/10.3390/rs14020350
APA StyleHuang, L., Lu, Z., Xiao, Z., Ren, C., Song, J., & Li, B. (2022). Suppression of Jammer Multipath in GNSS Antenna Array Receiver. Remote Sensing, 14(2), 350. https://doi.org/10.3390/rs14020350