3.1. C/N0
C/
N0 is a critical parameter for spaceborne navigation since sidelobe signals are mostly received.
C/
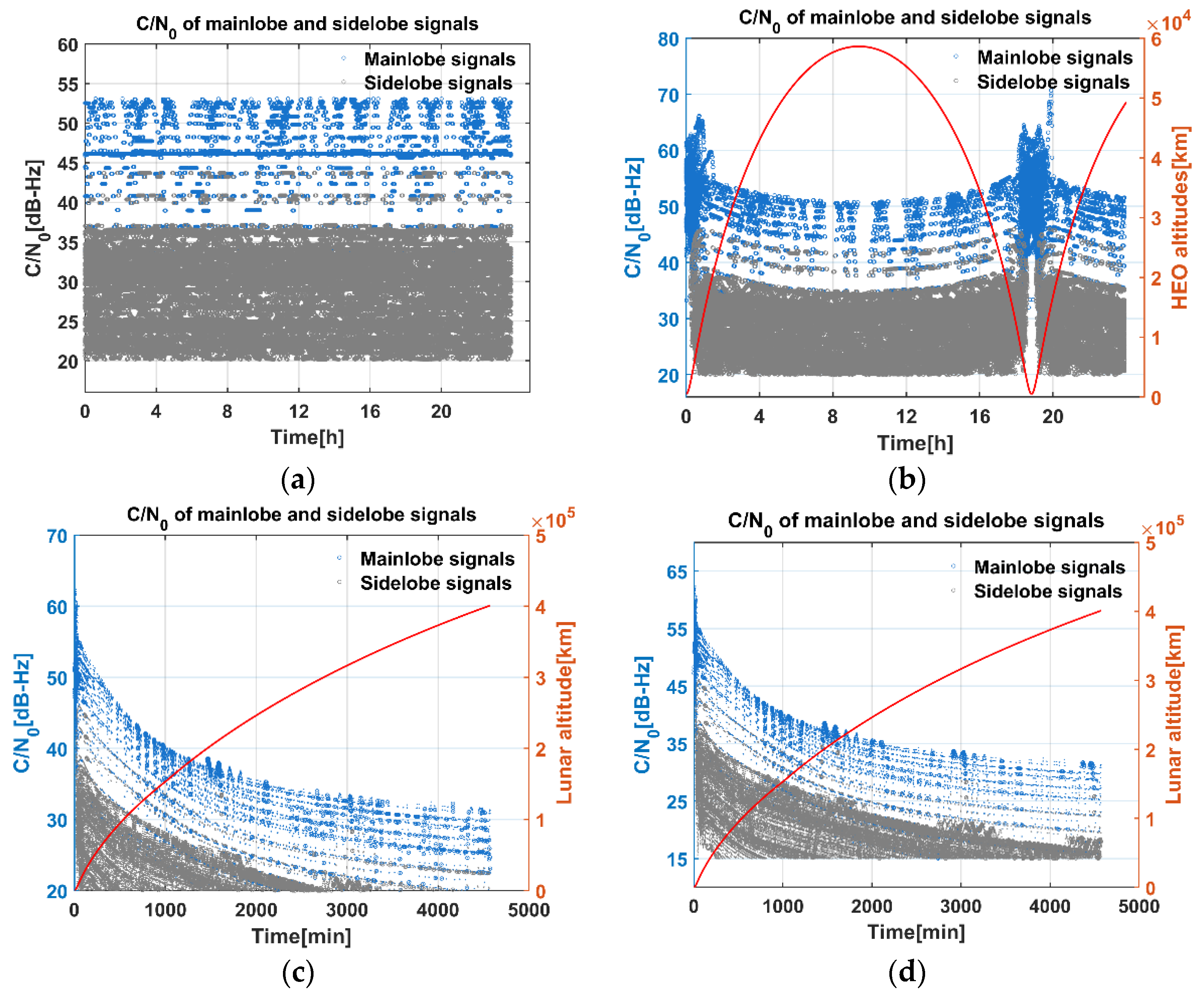
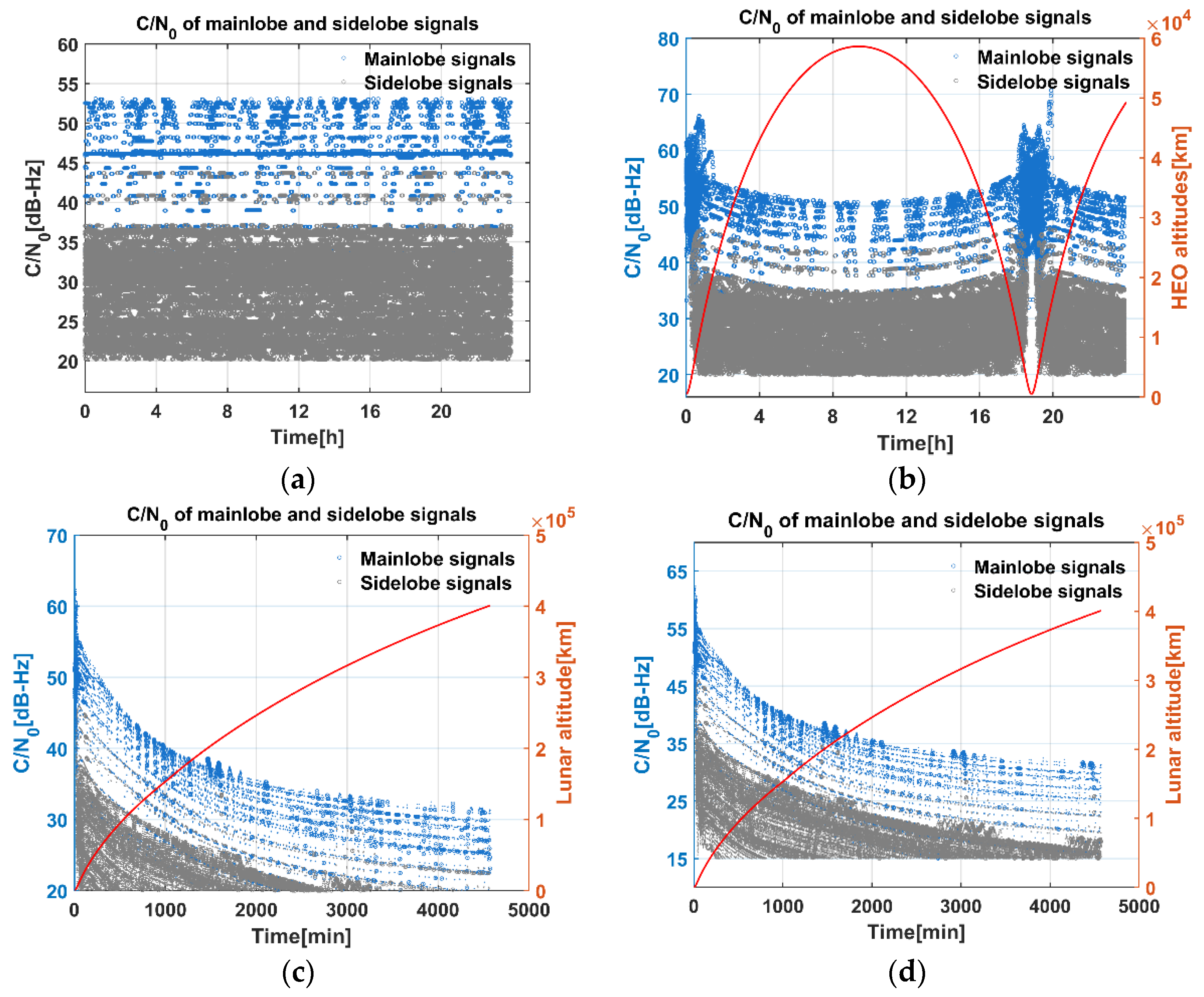
N0 of GEO, HEO, and lunar trajectory are shown in
Figure 7. In our paper,
C/
N0 was calculated using Equation (2), in which the transmission distances between GNSS satellites and spacecraft were computed using the orbits described in
Table 1 and
Table 3,
Table 4 and
Table 5. Note that we showed
C/
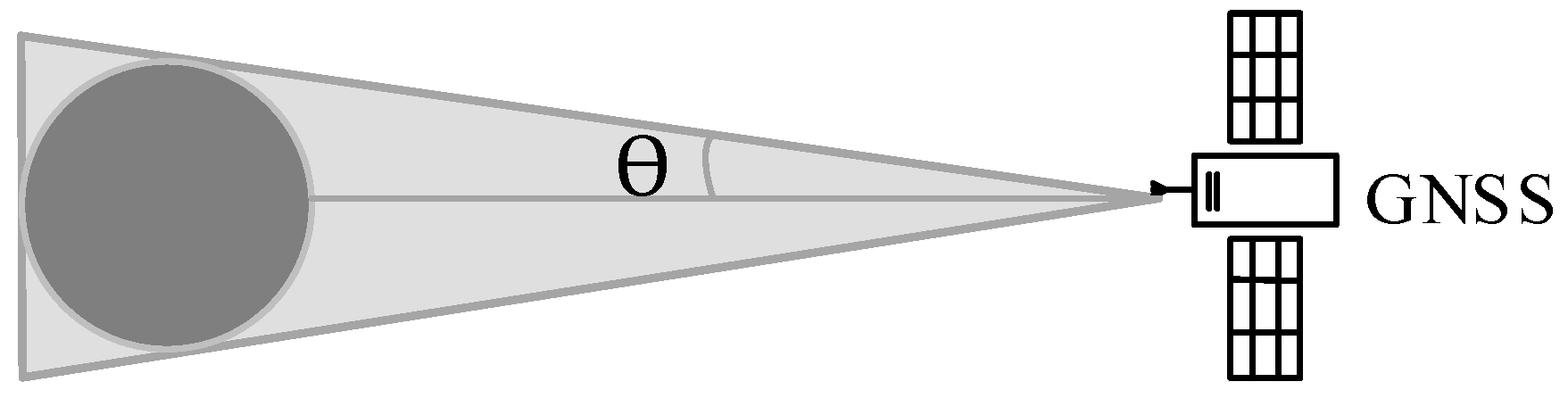
N0 of each visible GNSS satellite here. A GNSS satellite was visible once the signal was not blocked by the Earth and the
C/
N0 was beyond the receiver sensitivity. As the spacecraft moves along its orbit, the received signals were marked as blue or grey dots for mainlobe or sidelobe signals, respectively. The red curve in
Figure 7b refers to altitudes of HEO; the red curves in
Figure 7c,d refer to altitudes of lunar trajectory. Obviously, the altitude of GEO was basically the same during the simulation period, so it was not shown here. Numbers of observations from mainlobe and sidelobe signals were collected in
Table 7. The simulation period of GEO, HEO, and lunar trajectory was 24, 24, and 76.2 h, respectively. The sampling rate of the three types of spacecraft was 30 s.
For the GEO spacecraft, 3 GEO and 3 IGSO satellites of BDS-3 were constantly visible. Mainlobe signal variation was between 35 and 46 dB-Hz; sidelobe signals mostly ranged between 16~32 dB-Hz. Numbers of GEO observations showed that almost 92.4% of the received signals were sidelobe signals, which is reasonable, since the altitude of GEO was higher than most of the GNSS satellites.
For the HEO spacecraft, the highest C/N0 appeared at perigee, which was as strong as 65 dB-Hz. When the spacecraft moved towards apogee, C/N0 was reduced because sidelobe signals were received. In total, 86.5% of the received signals were from sidelobe signals. HEO spaceborne antenna received more mainlobe signals than that of GEO. This was due to the low altitude near the perigee, where mostly mainlobe signals were received.
For lunar trajectory, when receiver sensitivity was set as 20 dB-Hz, 78.4% of the received signals were sidelobe signals. Due to the long transmission loss, C/N0 of most signals were below receiver thresholds. When receiver sensitivity increased to 15 dB-Hz, the received signals increased by 6.5% and 94.2% for mainlobe and sidelobe signals respectively, which will bring significant improvement in signal visibility.
3.2. Signal Visibility and GDOP
The above analysis of
C/
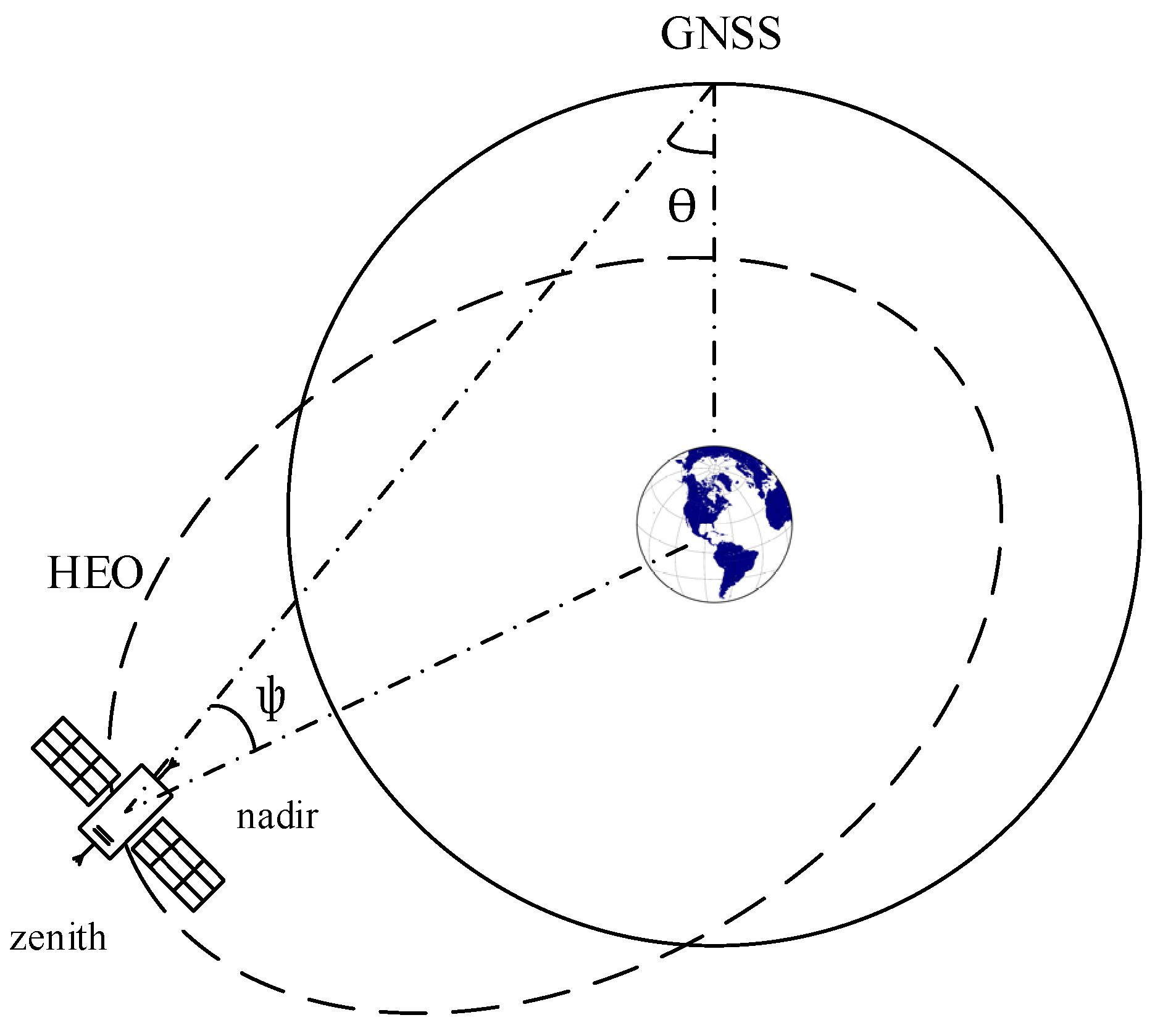
N0 indicates that abundant signal visibility of GEO and HEO spacecraft can be ensured. The satellite was visible once the nadir angle was greater than the Earth block angle and the
C/
N0 was beyond the receiver sensitivity. GDOP was an important index to measure the effect of the satellite geometry on the positioning and timing solution [
39,
40]. It can be calculated by:
For multi-GNSS constellations, it was assumed that the measurements of all the satellites were statistically independent. Taking dual-GNSS constellation as an example,
and
is the satellites from different constellations, the matrix
is expressed as follows:
where
;
is the approximate position of the receiver;
is the position of the
i-th satellite;
is the distance of the i-th satellite with respect to the receiver.
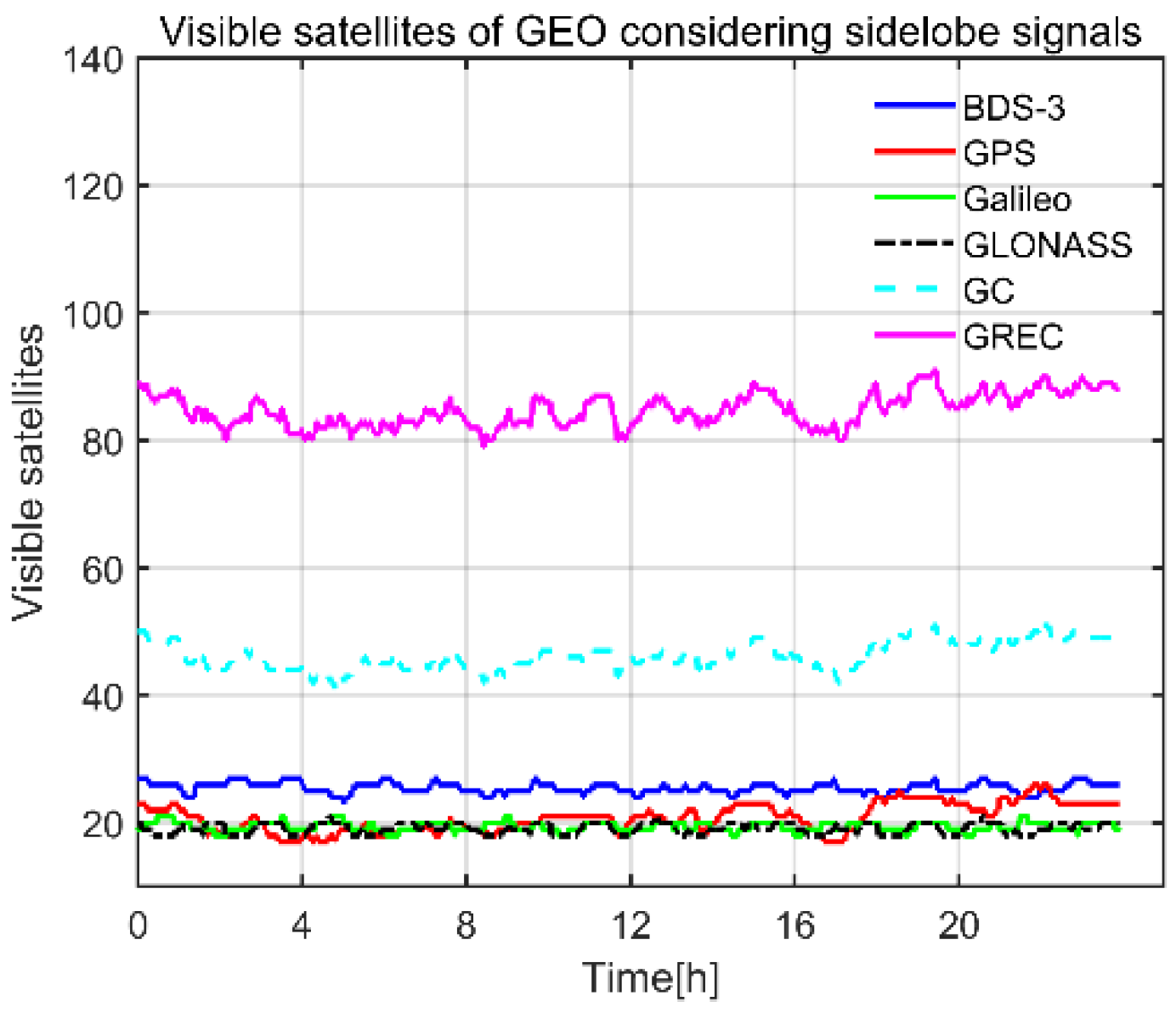
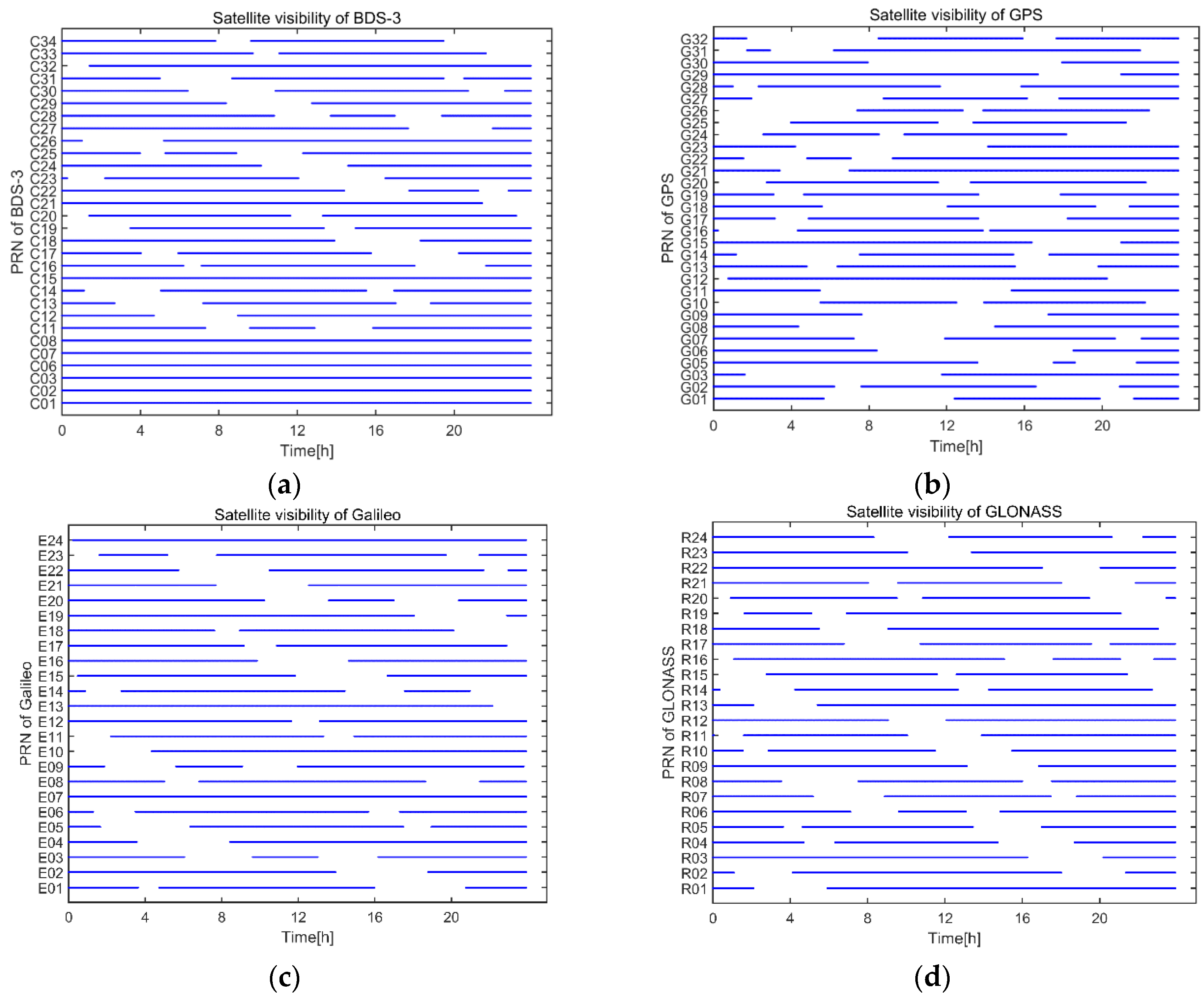
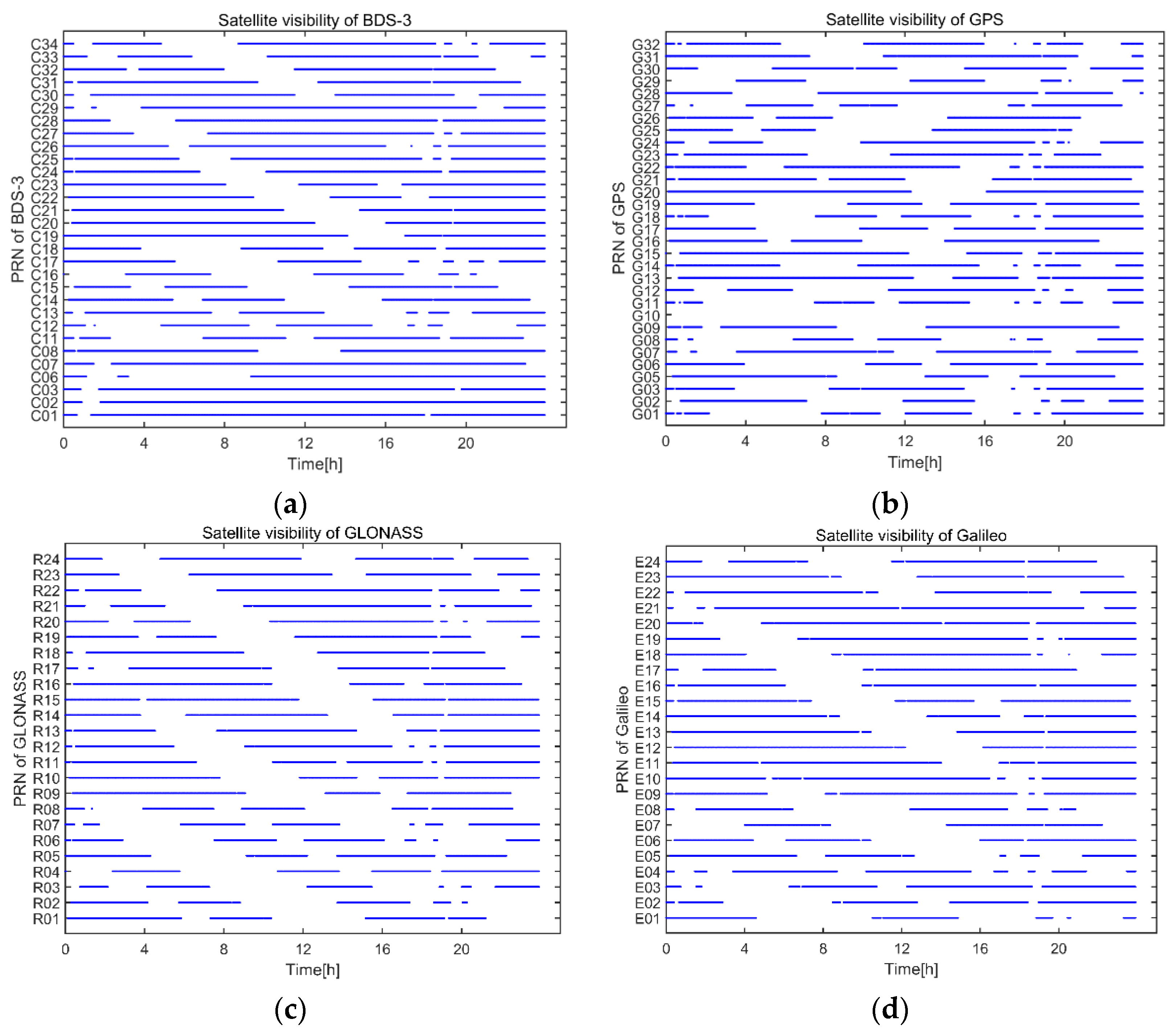
Visible satellites of the GEO spacecraft are shown in
Figure 8 and
Figure 9. Meanwhile, visible satellites of each GNSS constellation were calculated. For the GEO spacecraft, the mean visible satellites of BDS-3, GPS, Galileo, and GLONASS over 24 h were 25.4/21.3/19.4/19.1, respectively. Satellite visibility of BDS-3 from
Figure 9 showed that GEO and IGSO satellites of BDS-3 were constantly visible. This was the reason why visible satellites of BDS-3 were more than that of GPS. Mean visible satellites of GREC combination reached 84.8.
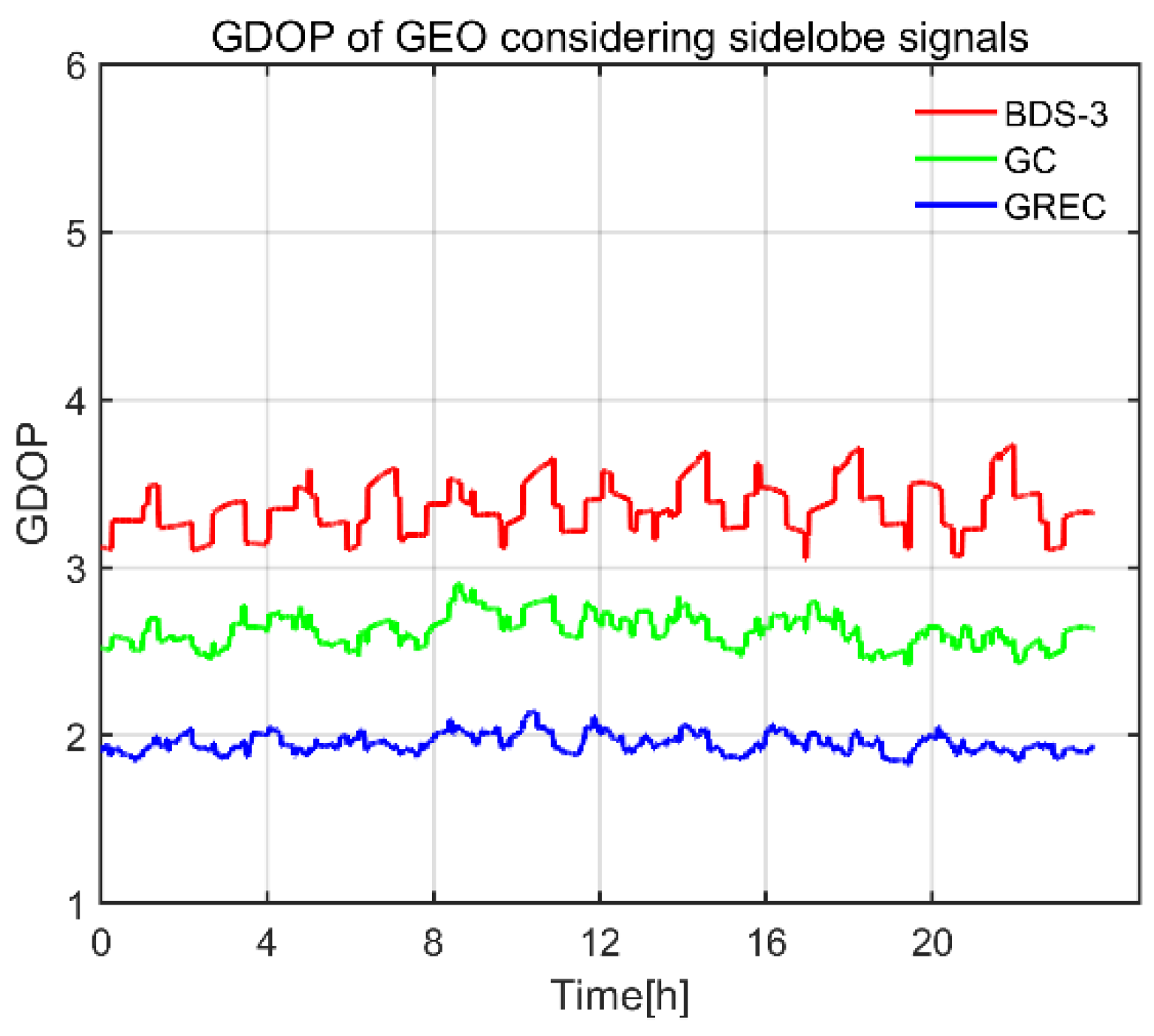
GDOP of GEO spacecraft is shown in
Figure 10. The mean GDOP of BDS-3 is 3.4. With GPS combined, it improved to 2.6, and four systems yield a mean GDOP of 2.0, which is a rather good satellite geometry. This good satellite geometry was simply benefited from the large number of visible satellites, as we have shown in
Figure 8. For GEO spacecraft, the distance between the receiver and the GNSS satellites was not far enough to make serious signal attenuation; therefore, a large number of sidelobe signals could be received, leading to a large number of visible satellites.
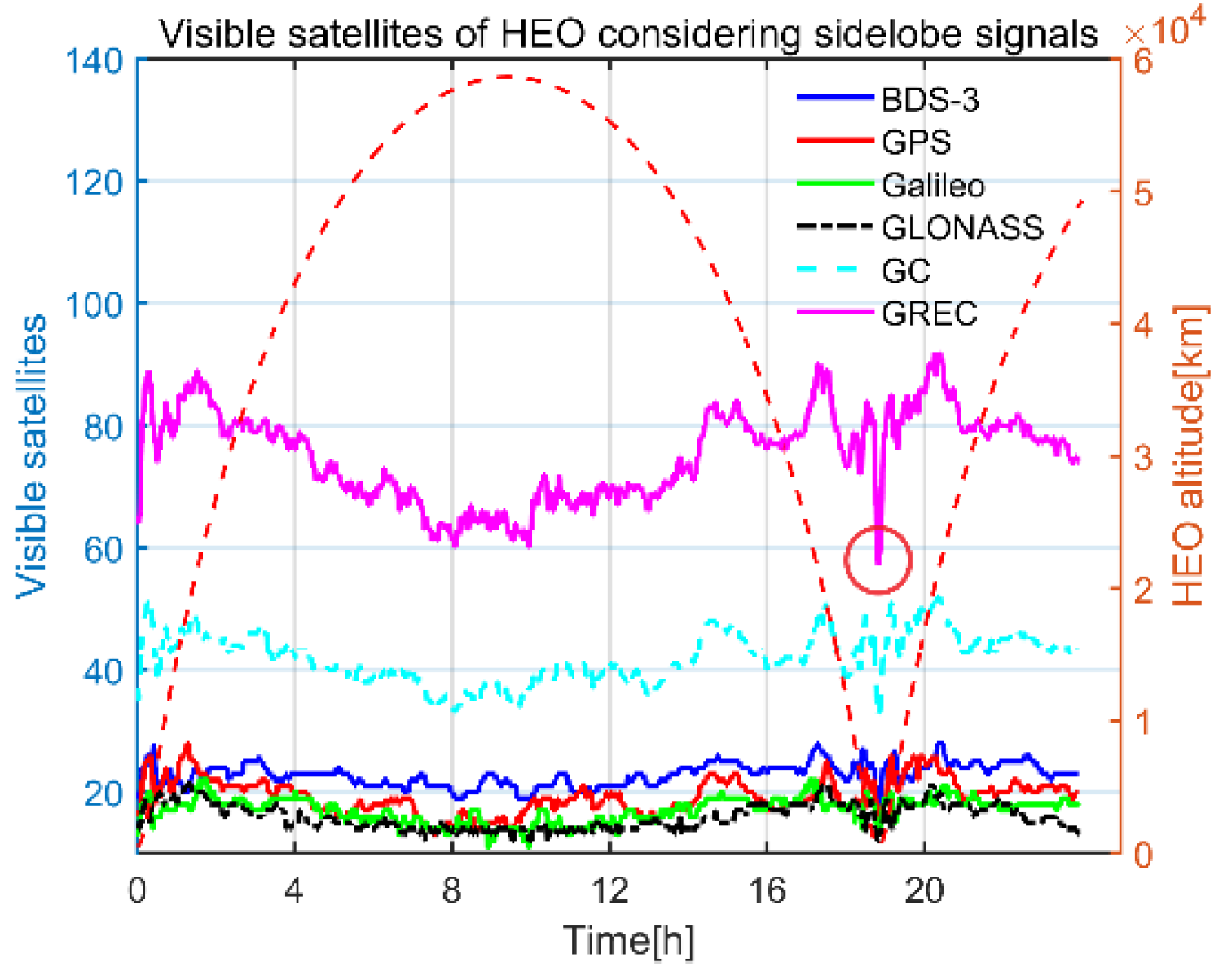
Visible satellites of HEO spacecraft are shown in
Figure 11. Visible satellites around apogee were slightly less than that of perigee, where signals from the same side and different side of the Earth were both received. We noticed that there was a sharp decrease of visible satellites at the lowest altitude of HEO, which was marked as the red circle in
Figure 11. This was because the nadir angles of the spacecraft with respect to GNSS satellites were relatively small; therefore, signals from the other side of the Earth were mostly blocked. When the HEO spacecraft moved away from perigee, the altitude of the spacecraft increased and more signals from the other side of the Earth were tracked. Mean visible satellites of BDS-3, GPS, Galileo and GLONASS over 24 h were 22.9/19.8/17.0/15.9, respectively. From
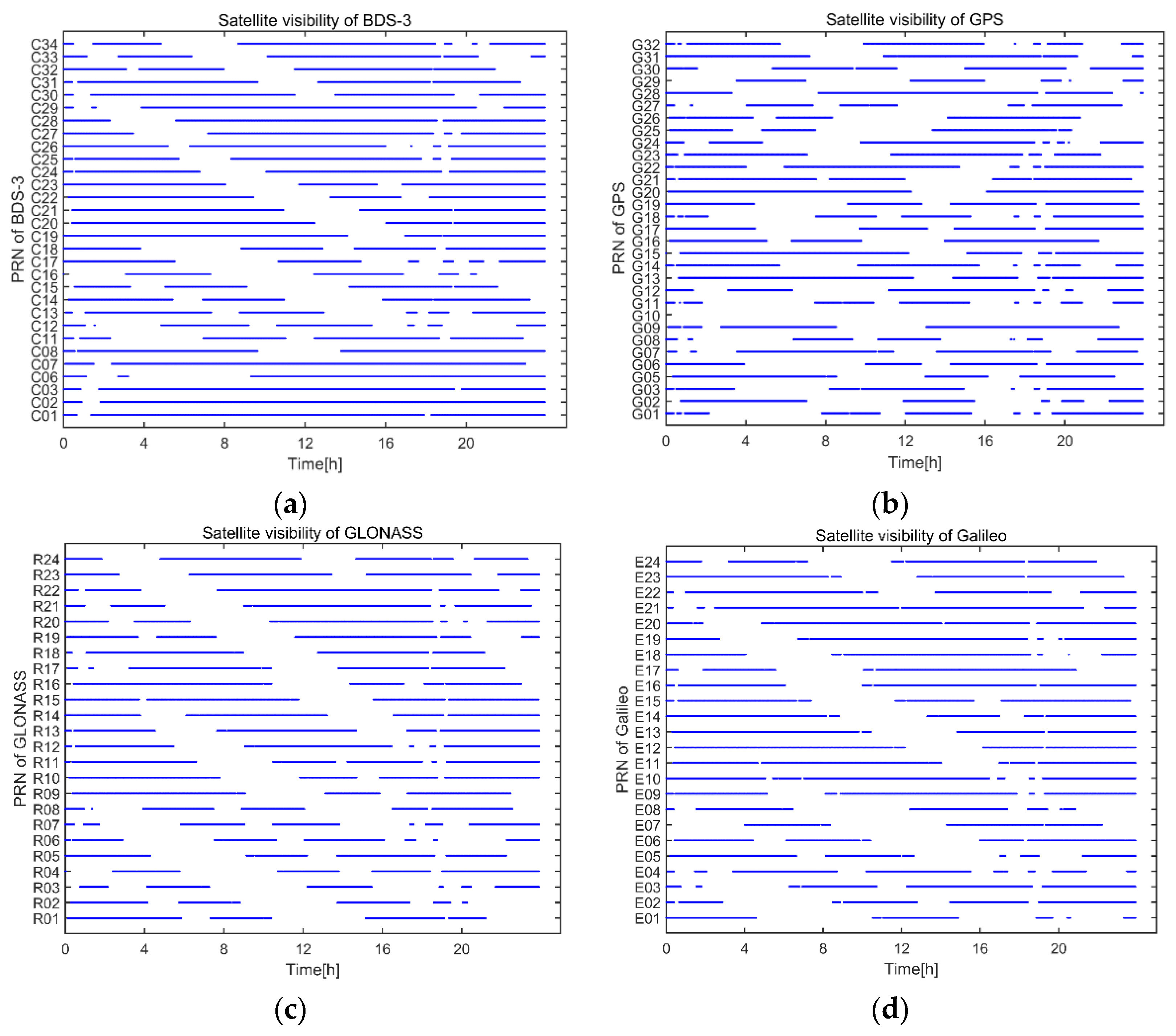
Figure 12a,b, we can see that three GEO satellites of BDS-3 were about 94.0% time visible during the whole simulation period. This is why the visible satellites of BDS-3 were more than that of GPS. Considering that there were 24 satellites of Galileo and GLONASS, less visible satellites from the two systems are reasonable. Since the Galileo altitude was slightly higher than GLONASS, more signals of Galileo from the other side of the Earth could be received.
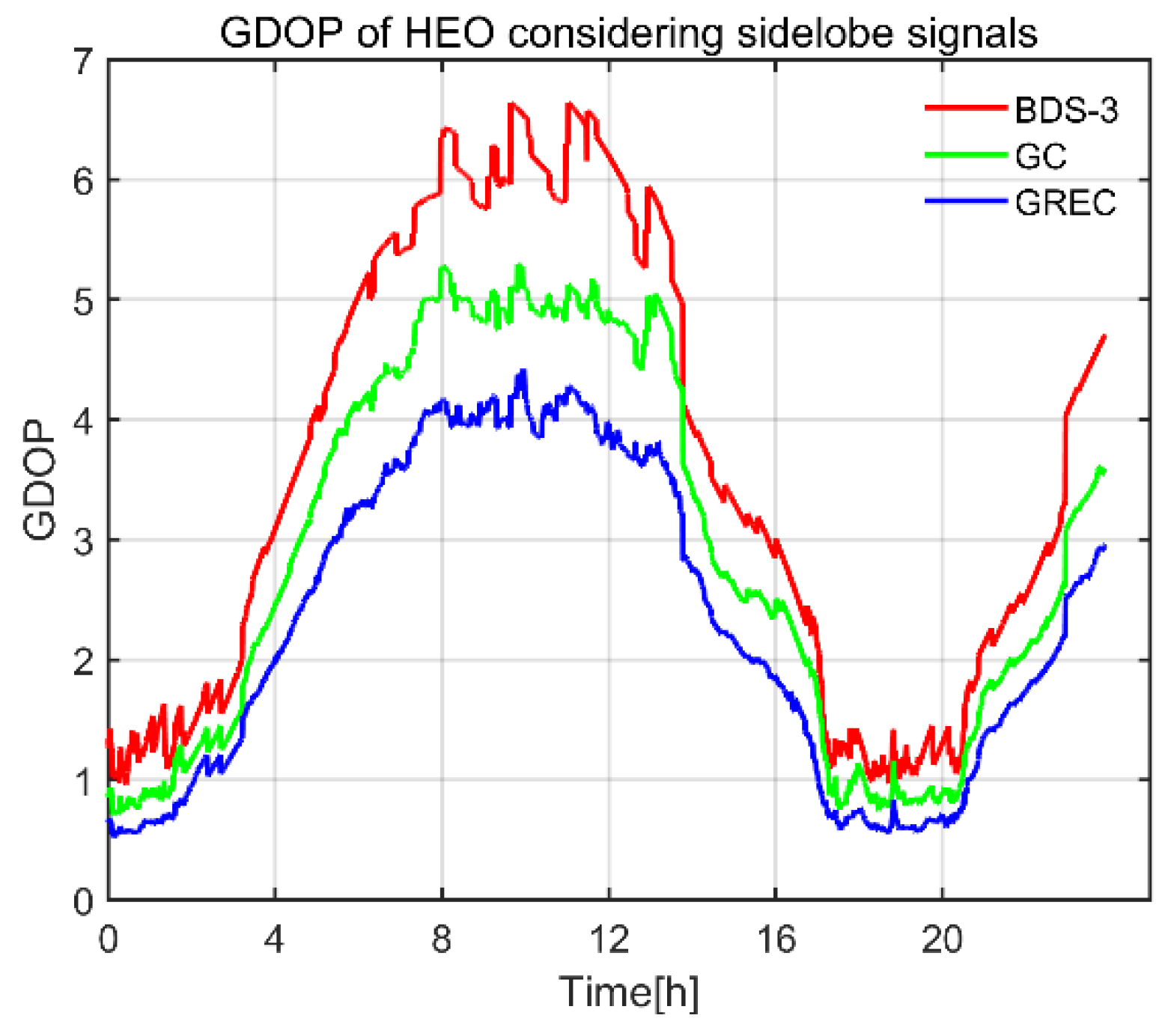
GDOP of the HEO spacecraft is shown in
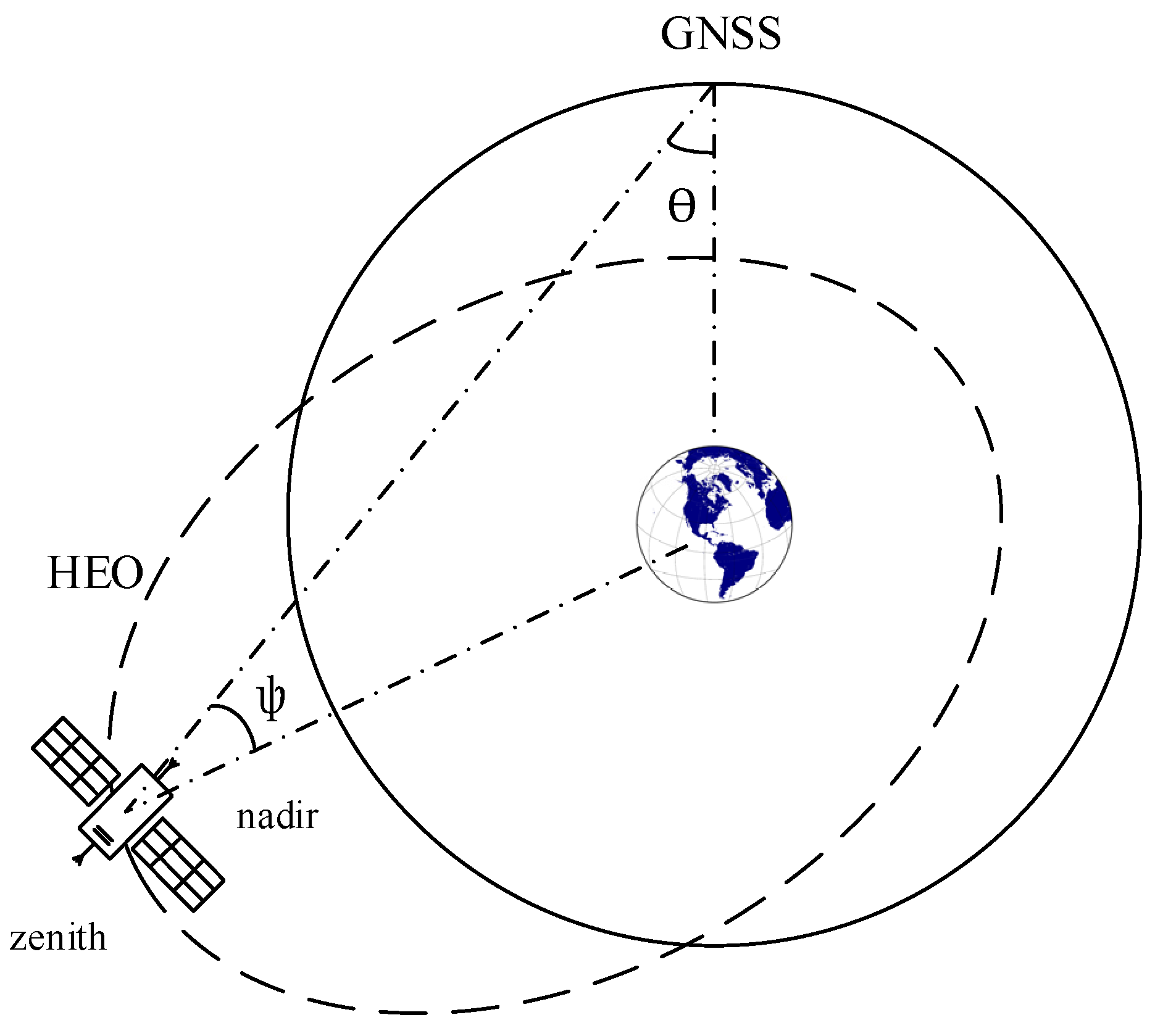
Figure 13, it rose and fell. We obtained the best satellite geometry near perigee, and the worst satellite geometry near apogee. GDOP of BDS-3 ranged from 0.96~6.64. With GPS included, GDOP decreased to 0.71~5.30. GDOP of GREC combination varied from 0.52~4.42. Mean GDOP of BDS-3, BDS-3/GPS and GREC combination was 3.57, 2.88 and 2.3, respectively. This good satellite geometry also resulted from the large number of visible satellites. For the HEO spacecraft, nadir- and zenith-pointing antennas were mounted; therefore, good satellite visibility could be realized.
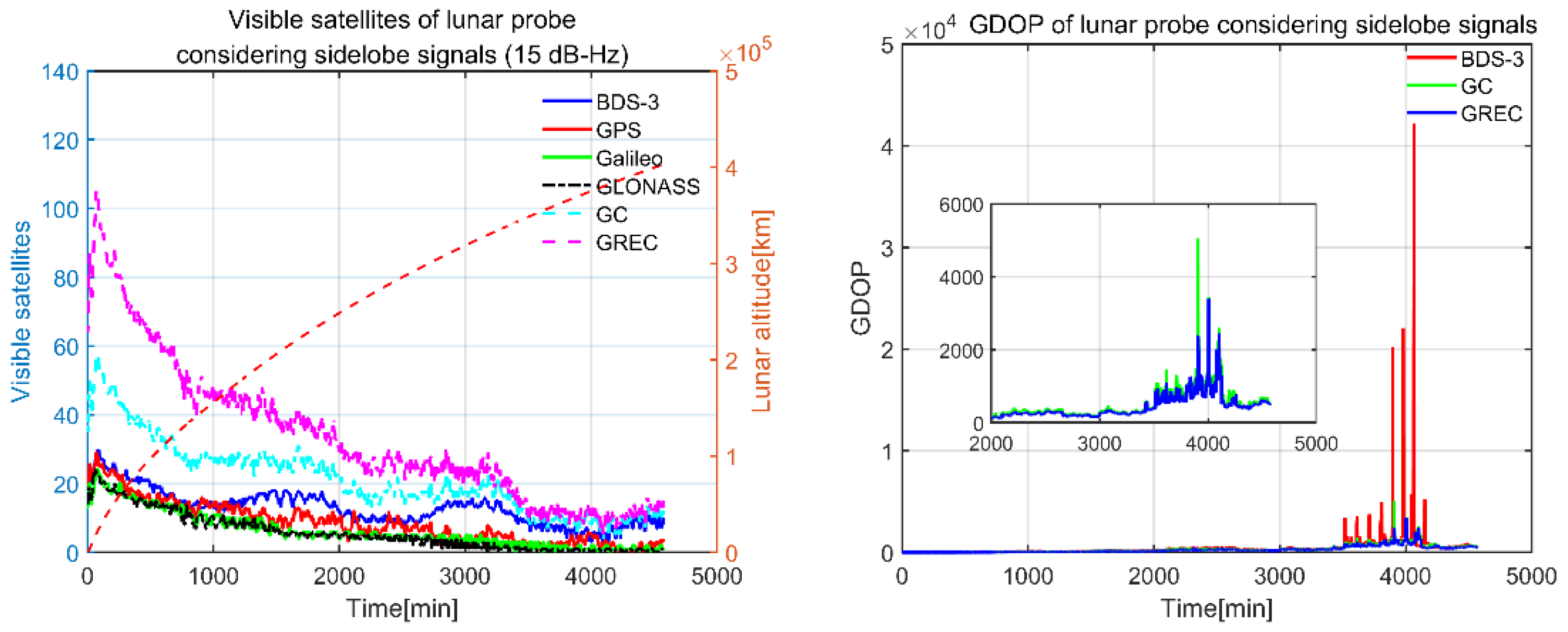
Visible satellites and GDOP of lunar probe with thresholds of 20 and 15 dB-Hz are shown in
Figure 14 and
Figure 15, respectively.
The lunar probe experienced larger signal attenuation than the GEO and HEO spacecraft. It received most signals near departing epochs, then the visible satellites decreased as the lunar probe was flying near the moon. We saw that, for the threshold of 20 dB-Hz, with only BDS-3 satellites involved, satellite geometry was rather poor, and the lunar probe could only track about 2 visible satellites as it was moving towards the moon. When more systems were included, the situation of sparse signal was still not improved. Mean visible satellites of BDS-3, GPS, Galileo, and GLONASS over the simulation period, i.e., 76.2 h were 7.7/ 4.9/ 3.5/ 3.1, respectively. As the receiver threshold increased to 15 dB-Hz, we could see that there was a significant increase in visible satellites. However, the satellite geometry was still poor for BDS-3 only. It improved as GPS was combined with BDS-3. When four systems were included, the GDOP decreased further and reached a maximum of 3392. Mean visible satellites of BDS-3, GPS, Galileo and GLONASS were 13.0/ 8.6/ 6.3/ 5.8, respectively. GEO and IGSO satellites of BDS-3 were 47.4% visible during the whole simulation time, which was almost twice compared with the MEO satellites from BDS-3, GPS, Galileo and GLONASS.
Unlike the GEO and HEO spacecraft, signal reception interruption was likely to happen for the lunar probe. As shown in
Table 8, with a receiver threshold of 20 dB-Hz, the lunar probe could not track 1 or 4 satellites continuously for all the combinations. When mainlobe and sidelobe signals were both considered, the availability of at least 1 BDS-3 satellite was almost the same as the B2 signal in
Table 8 of ref [
30], in which real BDS 3D antenna patterns were used. The availability of at least 4 BDS-3 satellites was slightly higher than the results of all the signals in
Table 8 of ref [
30]. When the receiver threshold improved to 15 dB-Hz, the lunar probe was able to receive at least 1 satellite continuously for all the combinations. Meanwhile, BDS-3/GPS and GREC combinations were able to offer four visible satellites continuously. Due to the large GDOP of these conditions, it made no sense to discuss position, velocity, and time navigation performances, even if there were at least four visible satellites.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}