
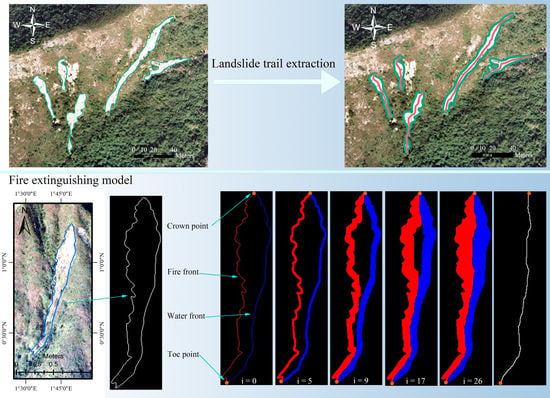
Landslide Trail Extraction Using Fire Extinguishing Model

 ,
,  ,
,  ,
, 
Abstract
1. Introduction
- (1)
- A fire extinguishing model is proposed for centerline extraction from polygonal objects. The model guarantees the centrality of the resulting centerlines while preserving the topology without resorting to branch pruning steps. The main features of this model are its robustness in handling polygons of various shapes and scales, and that it is easy to understand and implement.
- (2)
- Based on the proposed fire extinguishing model, a new workflow for LTE is implemented, which provides three separate pieces of information about the landslide: the trail, the crown and toe points, and the attributes associated with the trail, such as travel distance, angle, and horizontal distance. The proposed LTE workflow, being stable and fully automatic, is capable of extracting landslide trials that are comparative to manually mapping. This indicates the workflow’s practical value for landslide mapping.
- (3)
- Experiments from two study areas were carried out based on real-world remote sensing image data, and experimental results demonstrate that the proposed LTE method outperforms the baseline method and can produce better results in terms of completeness, centrality, and direction.
2. Related Work
3. Method
- (1)
- Preprocessing. This step is applied to eliminate potential errors in the input data, including (i) Noise reduction for DEM; and (ii) hole filling, topology recovery, and rasterization for a landslide polygon.
- (2)
- Trail extraction. This is the main procedure for LTE. It consists of three sequential subroutines: (i) Landslide characteristic points localization (LCPL); (ii) Fire extinguishing model (FEM); and (iii) Removal of redundant pixels (RRP). Firstly, two landslide characteristic points, extracted through LCPL, serve as two endpoints for the centerline. Secondly, FEM is proposed to obtain the main body of the centerline. Finally, to guarantee the thinness of the centerline, RRP is used to remove those pixels that cause double-pixel-width.
- (3)
- Attribute extraction. Landslide trail associated attributes, such as travel distance and vertical drop, are obtained from DEM and the trails.
3.1. Preprocessing
3.2. Landslide Trail Extraction
3.2.1. Landslide Characteristic Point Localization
3.2.2. Fire Extinguishing Model
- Grassfire model
- 2.
- Definition of fire extinguishing model
- 3.
- Difference between the proposed FEM and the grassfire model
3.2.3. Removal of Redundant Pixels
3.3. Landslide Attribute Extraction
4. Experiment and Analysis
4.1. Experimental Setup
4.1.1. Study Area
4.1.2. Dataset
4.1.3. Evaluation Metrics
4.2. Results and Qualitative Evaluation
4.2.1. Study Area A
4.2.2. Study Area B
4.3. Quantitative Evaluation
5. Discussion
5.1. Computational Complexity
5.2. Advantages
- It is an automatic LTE method. It combines topological and geometric information of landslides effectively. Thus, it can reduce the load on users substantially.
- In addition to the geometric information, it also considers the topological information of landslides, allowing it to generate landslide trails more accurately.
- There are no parameter finetuning requirements, unlike the baseline method, which requires two free parameters. As a result, it would be more practical in real-world applications.
5.3. Limitations and Future Work
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Dai, F.C.; Lee, C.F.; Wang, S.J. Characterization of Rainfall-Induced Landslides. Int. J. Remote Sens. 2003, 24, 4817–4834. [Google Scholar] [CrossRef]
- Gao, L.; Zhang, L.; Lu, M. Characterizing the Spatial Variations and Correlations of Large Rainstorms for Landslide Study. Hydrol. Earth Syst. Sci. 2017, 21, 4573–4589. [Google Scholar] [CrossRef]
- Nugraha, H.; Wacano, D.; Dipayana, G.A.; Cahyadi, A.; Mutaqin, B.W.; Larasati, A. Geomorphometric Characteristics of Landslides in the Tinalah Watershed, Menoreh Mountains, Yogyakarta, Indonesia. Procedia Environ. Sci. 2015, 28, 578–586. [Google Scholar] [CrossRef]
- Kang, C.; Zhang, F.; Pan, F.; Peng, J.; Wu, W. Characteristics and Dynamic Runout Analyses of 1983 Saleshan Lan slide. Eng. Geol. 2018, 243, 181–195. [Google Scholar] [CrossRef]
- Franks, C.A.M. Characteristics of Some Rainfall-Induced Landslides on Natural Slopes, Lantau Island, Hong Kong. Q. J. Eng. Geol. Hydrogeol. 1999, 32, 247–259. [Google Scholar] [CrossRef]
- Sun, Y.; Yang, J.; Song, E. Runout Analysis of Landslides Using Material Point Method. In IOP Conference Series: Earth and Environmental Science; IOP Publishing: Bristol, UK, 2015; Volume 26, p. 12014. [Google Scholar] [CrossRef]
- McDougall, S. 2014 Canadian Geotechnical Colloquium: Landslide Runout Analysis—Current Practice and Challenges. Can. Geotech. J. 2017, 54, 605–620. [Google Scholar] [CrossRef]
- Finlay, P.J.; Mostyn, G.R.; Fell, R. Landslide Risk Assessment: Prediction of Travel Distance. Can. Geotech. J. 1999, 36, 556–562. [Google Scholar] [CrossRef]
- Cruden, D.M.; Fell, R. (Eds.) Landslide Risk Assessment; Routledge: Oxfordshire, UK, 2018; ISBN 978-0-203-74952-4. [Google Scholar]
- Hungr, O. A review of landslide hazard and risk assessment methodology. Landslides Eng. Slopes. Exp. Theory Pract. 2016, 1, 3–27. [Google Scholar] [CrossRef]
- Ho, K.K.S.; Ko, F.W.Y. Application of Quantified Risk Analysis in Land-slide Risk Management Practice: Hong Kong Experience. Georisk 2009, 3, 134–146. [Google Scholar] [CrossRef]
- Kwan, J.S.H.; Chan, S.L.; Cheuk, J.C.Y.; Koo, R.C.H. A Case Study on an Open Hillside Landslide Impacting on a Flexible Rockfall Barrier at Jordan Valley, Hong Kong. Landslides 2014, 11, 1037–1050. [Google Scholar] [CrossRef]
- Ng, K.C.; Chiu, K.M.; Ho, K.K.S.; Chan, V.M.C. Application of GIS to Landslide Risk Management in Hong Kong. In Proceedings of the 2008 Géo Edmonton2008, Edmonton, AB, Canada, 21–24 September 2008; pp. 434–441. [Google Scholar]
- Lo, C.-M.; Feng, Z.-Y.; Chang, K.-T. Landslide Hazard Zoning Based on Numerical Simulation and Hazard Assessment. Geomat. Nat. Hazards Risk 2018, 9, 368–388. [Google Scholar] [CrossRef]
- Dahal, R.K. Landslide Hazard Mapping in GIS. J. Nepal Geol. Soc. 2017, 53, 63–91. [Google Scholar] [CrossRef]
- Ma, Z.; Mei, G. Deep Learning for Geological Hazards Analysis: Data, Models, Applications, and Opportunities. Earth Sci. Rev. 2021, 223, 103858. [Google Scholar] [CrossRef]
- Kwan, J.S.H.; Koo, R.C.H.; Ng, C.W.W. Landslide Mobility Analysis for Design of Multiple Debris-Resisting Barriers. Can. Geotech. J. 2015, 52, 1345–1359. [Google Scholar] [CrossRef]
- Venture, M.F.J. Final Report on the Compilation of the Enhanced Natural Terrain Landslide Inventory; HKSAR Government, Geotechnical Engineering Office: Kowloon, Hong Kong, China, 2007.
- Shi, W.; Zhang, M.; Ke, H.; Fang, X.; Zhan, Z.; Chen, S. Landslide Recognition by Deep Convolutional Neural Network and Change Detection. IEEE Trans. Geosci. Remote Sens. 2020, 59, 4654–4672. [Google Scholar] [CrossRef]
- Cheng, G.; Zhu, F.; Xiang, S.; Pan, C. Road Centerline Extraction via Semisupervised Segmentation and Multidirection Nonmaximum Suppression. IEEE Geosci. Remote Sens. Lett. 2016, 13, 545–549. [Google Scholar] [CrossRef]
- Miao, Z.; Shi, W.; Zhang, H.; Wang, X. Road Centerline Extraction from High-Resolution Imagery Based on Shape Features and Multivariate Adaptive Regression Splines. IEEE Geosci. Remote Sens. Lett. 2013, 10, 583–587. [Google Scholar] [CrossRef]
- Luthra, R.; Goyal, G. Simulation of Zhang Suen Algorithm Using Feed-Forward Neural Networks. Commun. Appl. Electron. 2015, 2, 9–15. [Google Scholar] [CrossRef][Green Version]
- Wieser, E.; Seidl, M.; Zeppelzauer, M. A Study on Skeletonization of Complex Petroglyph Shapes. Multimed. Tools Appl. 2017, 76, 8285–8303. [Google Scholar] [CrossRef]
- Blum, H. A Transformation for Extracting New Descriptors of Shape; MIT Press: Cambridge, UK, 1967. [Google Scholar]
- Wang, T.-Q.; Liu, C. Fully Convolutional Network Based Skeletonization for Handwritten Chinese Characters. In Proceedings of the Thirty-Second AAAI Conference of Artificial Intelligence, New Orleans, LA, USA, 2–7 February 2018. [Google Scholar]
- Zhao, F.; Tang, X. Preprocessing and Postprocessing for Skeleton-Based Fingerprint Minutiae Extraction. Pattern Recognit. 2007, 40, 1270–1281. [Google Scholar] [CrossRef]
- Mliki, H.; Zaafouri, R.; Hammami, M. Human Action Recognition Based on Discriminant Body Regions Selection. Signal Image Video Process. 2018, 12, 845–852. [Google Scholar] [CrossRef]
- Saha, P.K.; Borgefors, G.; Di Baja, G.S. Skeletonization and Its Applications—A Review. In Skeletonization; Elsevier: Amsterdam, The Netherlands, 2017; pp. 3–42. [Google Scholar]
- Saha, P.K.; Borgefors, G.; Di Sanniti Baja, G. A Survey on Skeletonization Algorithms and Their Applications. Pattern Recognit. Lett. 2016, 76, 3–12. [Google Scholar] [CrossRef]
- Siddiqi, K.; Pizer, S. Medial Representations: Mathematics, Algorithms and Applications; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2008; ISBN 140208658X. [Google Scholar]
- Zhang, T.; Suen, C. A Fast Parallel Algorithm for Thinning Digital Patterns. Commun. ACM 1984, 27, 236–239. [Google Scholar] [CrossRef]
- Lü, H.E.; Wang, P.S.P. A Comment on a “Fast Parallel Algorithm for Thinning Digital Patterns”. Commun. ACM 1986, 29, 239–242. [Google Scholar] [CrossRef]
- Dias, A.; Hart, J.R.; Fung, E.K.S. The Enhanced Natural Terrain Landslide Inventory. In Proceedings of the Natural Hillsides: Study and Risk Mitigation Measures, Proceedings of the Hong Kong Institution of Civil Engineers, Geotechnical Division, Annual Conference, Hong Kong, China, 17 April 2009; Volume 17, pp. 71–78. [Google Scholar]
- Ho, K.K.S.; Wong, H.N. Application of Quantitative Risk Assessment in Landslide Risk Management in Hong Kong. In Proceedings of the 14th South East Asian Geotechnical Conference, Hong Kong, China, 10–14 December 2001; Volume 1, pp. 123–128. [Google Scholar]
- Attali, D.; Montanvert, A. Computing and Simplifying 2D and 3D Continuous Skeletons. Comput. Vis. Image Underst. 1997, 67, 261–273. [Google Scholar] [CrossRef]
- Brandt, J.W.; Algazi, V.R. Continuous Skeleton Computation by Voronoi Diagram. CVGIP Image Underst. 1992, 55, 329–338. [Google Scholar] [CrossRef]
- Dey, T.K.; Zhao, W. Approximating the Medial Axis from the Voronoi Diagram with a Convergence Guarantee. Algorithmica 2004, 38, 179–200. [Google Scholar] [CrossRef]
- Liu, H.; Wu, Z.; Frank Hsu, D.; Peterson, B.S.; Xu, D. On the Generation and Pruning of Skeletons Using Generalized Voronoi Diagrams. Pattern Recognit. Lett. 2012, 33, 2113–2119. [Google Scholar] [CrossRef]
- Dimitrov, P.; Damon, J.N.; Siddiqi, K. Flux Invariants for Shape. In Proceedings of the 2003 IEEE Conference on Computer Vision and Pattern Recognition, Madison, WI, USA, 18–20 June 2003; pp. I-835–I-841. [Google Scholar]
- Tek, H. Symmetry Maps of Free-Form Curve Segments via Wave Propagation. Int. J. Comput. Vis. 2003, 54, 35–81. [Google Scholar] [CrossRef]
- Padole, G.V.; Pokle, S.B. New Iterative Algorithms for Thinning Binary Images. In Proceedings of the 2010 3rd International Conference on Emerging Trends in Engineering and Technology, Washington, DC, USA, 19–21 November 2010; pp. 166–171. [Google Scholar]
- Soni, S.; Kaur, S. To Propose an Improvement in Zhang-Suen Algorithm for Image Thinning in Image Processing. Int. J. Sci. Technol. Eng. 2016, 3, 7481. [Google Scholar]
- Panichev, O.; Voloshyna, A. U-Net Based Convolutional Neural Network for Skeleton Extraction. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops, Long Beach, CA, USA, 16–17 June 2019. [Google Scholar]
- Fodor, Á.; Fóthi, Á.; Kopácsi, L.; Somfai, E.; Lorincz, A. Skeletonization Combined with Deep Neural Networks for Superpixel Temporal Propagation. In Proceedings of the 2019 International Joint Conference on Neural Networks (IJCNN), Budapest, Hungary, 14–19 July 2019; pp. 1–7. [Google Scholar]
- Jerripothula, K.R.; Cai, J.; Lu, J.; Yuan, J. Image Co-Skeletonization via Co-Segmentation. IEEE Trans. Image Process. 2021, 30, 2784–2797. [Google Scholar] [CrossRef] [PubMed]
- Ko, D.H.; Hassan, A.U.; Majeed, S.; Choi, J. SkelGAN: A Font Image Skeletonization Method. J. Inf. Process. Syst. 2021, 17, 1–13. [Google Scholar]
- Wang, C.; Hayashi, Y.; Oda, M.; Itoh, H.; Kitasaka, T.; Frangi, A.F.; Mori, K. Tubular Structure Segmentation Using Spatial Fully Connected Network with Radial Distance Loss for 3D Medical Images. In Proceedings of the International Conference on Medical Image Computing and Computer-Assisted Intervention, Shenzhen, China, 13–17 October 2019; pp. 348–356. [Google Scholar]
- Dellow, S.; Massey, C.; Cox, S.; Archibald, G.; Begg, J.; Bruce, Z.; Carey, J.; Davidson, J.; Pasqua, F.D.; Glassey, P.; et al. Landslides Caused by the Mw7.8 Kaikōura Earthquake and the Immediate Response. Bull. N. Z. Soc. Earthq. Eng. 2017, 50, 106–116. [Google Scholar] [CrossRef]
- Pourghasemi, H.R.; Kornejady, A.; Kerle, N.; Shabani, F. Investigating the Effects of Different Landslide Positioning Techniques, Landslide Parti-tioning Approaches, and Presence-Absence Balances on Landslide Susceptibility Mapping. Catena 2020, 187, 104364. [Google Scholar] [CrossRef]
- Arcelli, C.; Di Baja, G.S. A Width-Independent Fast Thinning Algorithm. IEEE Trans. Pattern Anal. Mach. Intell. 1985, 7, 463–474. [Google Scholar] [CrossRef] [PubMed]
- Azarafza, M.M.; Azarafza, M.M.; Akgün, H.; Atkinson, P.M.; Derakhshani, R. Deep Learning-Based Landslide Susceptibility Mapping. Sci. Rep. 2021, 11, 24112. [Google Scholar] [CrossRef] [PubMed]
- Wang, H.; Zhang, L.; Luo, H.; He, J.; Cheung, R.W.M. {{AI-Powered}} Landslide Susceptibility Assessment in Hong Kong. Eng. Geol. 2021, 288, 106103. [Google Scholar] [CrossRef]
- Wang, Y.; Fang, Z.; Wang, M.; Peng, L.; Hong, H. Comparative Study of Landslide Susceptibility Mapping with Different Recurrent Neural Networks. Comput. Geosci. 2020, 138, 104445. [Google Scholar] [CrossRef]
- Segoni, S.; Tofani, V.; Rosi, A.; Catani, F.; Casagli, N. Combination of Rainfall Thresholds and Susceptibility Maps for Dynamic Landslide Hazard Assessment at Regional Scale. Front. Earth Sci. 2018, 6, 85. [Google Scholar] [CrossRef]
- Golovko, D.; Roessner, S.; Behling, R.; Kleinschmit, B. Automated Derivation and Spatio-Temporal Analysis of Landslide Properties in Southern Kyrgyzstan. Nat. Hazards 2017, 85, 1461–1488. [Google Scholar] [CrossRef]
- Choi, K.Y.; Cheung, R.W.M. Landslide Disaster Prevention and Mitigation through Works in Hong Kong. J. Rock Mech. Geotech. Eng. 2013, 5, 354–365. [Google Scholar] [CrossRef]
- Su, Z.; Chow, J.K.; Tan, P.S.; Wu, J.; Ho, Y.K.; Wang, Y.-H. Deep Convolutional Neural Network—Based Pixel-Wise Landslide Inventory Mapping. Landslides 2021, 18, 1421–1443. [Google Scholar] [CrossRef]
- Gao, F.; Wei, G.; Xin, S.; Gao, S.; Zhou, Y. 2d Skeleton Extraction Based on Heat Equation. Comput. Gr. 2018, 74, 99–108. [Google Scholar] [CrossRef]
- Haseena, F.; Clara, R. Performance Analysis of Iterative Thinning Methods Using Zhang Suen and Stentiford Algorithm. In Proceedings of the International Conference on Advancements in Computing Technologies, Panipat, India, 17–18 February 2018; Volume 4. [Google Scholar]
- Lv, Z.; Liu, T.; Benediktsson, J.A. Object-Oriented Key Point Vector Dis-tance for Binary Land Cover Change Detection Using VHR Remote Sensing Images. IEEE Trans. Geosci. Remote Sens. 2020, 58, 6524–6533. [Google Scholar] [CrossRef]
- Prakash, N.; Manconi, A.; Loew, S. A New Strategy to Map Landslides with a Generalized Convolutional Neural Network. Sci. Rep. 2021, 11, 9722. [Google Scholar] [CrossRef]
- Zhang, A.; Shi, W. Mining Significant Fuzzy Association Rules with Dif-ferential Evolution Algorithm. Appl. Soft Comput. 2020, 97, 105518. [Google Scholar] [CrossRef]
- Li, Z.; Shi, W.; Myint, S.W.; Lu, P.; Wang, Q. Semi-Automated Landslide Inventory Mapping from Bitemporal Aerial Photographs Using Change Detection and Level Set Method. Remote Sens. Environ. 2016, 175, 215–230. [Google Scholar] [CrossRef]
- Keyport, R.N.; Oommen, T.; Martha, T.R.; Sajinkumar, K.S.; Gierke, J.S. A Comparative Analysis of Pixel- and Object-Based Detection of Landslides from Very High-Resolution Images. Int. J. Appl. Earth Obs. Geoinform. 2018, 64, 1–11. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Attribute | Denotation | Definition |
|---|---|---|
| Crown point | C | A point at the top of the landslide crown (highest point). |
| Toe point | T | A point at the distal end of debris tail (lowest down slope point). |
| Vertical drop | H | The vertical height of a landslide, it is equal to the altitude difference between the crown point and the toe point. |
| Horizontal distance | Lh | The length of the 2-D trail. |
| Travel distance | Lt | The length of the 3-D trail. |
| Mobility index | M | The ratio between the vertical drop (H) and the horizontal travel distance (Lh), i.e., H/Lh. |
| Travel distance angle | A | The angle between the horizontal plane and the line connecting the crown and toe points, equivalent to the arctangent of the mobility index. |
| Buffer Distance (m) | Threshold | Precision | |
|---|---|---|---|
| Baseline | Proposed | ||
| 0.5 | 0.3 | 0.60 | 0.90 |
| 0.5 | 0.15 | 0.35 | |
| 1.0 | 0.3 | 0.85 | 1.00 |
| 0.5 | 0.60 | 0.90 | |
| 1.5 | 0.3 | 0.95 | 1.00 |
| 0.5 | 0.70 | 1.00 | |
| 2.0 | 0.3 | 0.95 | 1.00 |
| 0.5 | 0.80 | 1.00 | |
| Buffer Distance (m) | Threshold | Precision | |
|---|---|---|---|
| Baseline | Proposed | ||
| 0.5 | 0.3 | 0.26 | 0.64 |
| 0.5 | 0.01 | 0.20 | |
| 1.0 | 0.3 | 0.64 | 0.95 |
| 0.5 | 0.27 | 0.70 | |
| 1.5 | 0.3 | 0.85 | 0.99 |
| 0.5 | 0.44 | 0.84 | |
| 2.0 | 0.3 | 0.95 | 1.00 |
| 0.5 | 0.59 | 0.93 | |
| Study Area | Running Time (Seconds) | |
|---|---|---|
| Baseline | Proposed | |
| A | 3 | 9 |
| B | 10 | 18 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhan, Z.; Shi, W.; Zhang, M.; Liu, Z.; Peng, L.; Yu, Y.; Sun, Y. Landslide Trail Extraction Using Fire Extinguishing Model. Remote Sens. 2022, 14, 308. https://doi.org/10.3390/rs14020308
Zhan Z, Shi W, Zhang M, Liu Z, Peng L, Yu Y, Sun Y. Landslide Trail Extraction Using Fire Extinguishing Model. Remote Sensing. 2022; 14(2):308. https://doi.org/10.3390/rs14020308
Chicago/Turabian StyleZhan, Zhao, Wenzhong Shi, Min Zhang, Zhewei Liu, Linya Peng, Yue Yu, and Yangjie Sun. 2022. "Landslide Trail Extraction Using Fire Extinguishing Model" Remote Sensing 14, no. 2: 308. https://doi.org/10.3390/rs14020308
APA StyleZhan, Z., Shi, W., Zhang, M., Liu, Z., Peng, L., Yu, Y., & Sun, Y. (2022). Landslide Trail Extraction Using Fire Extinguishing Model. Remote Sensing, 14(2), 308. https://doi.org/10.3390/rs14020308