
The RADARSAT Constellation Mission Core Applications: First Results

 ,
, 
 , and
, and 
Abstract
:1. Introduction
2. Mission Overview and Current Status
3. Environmental Applications
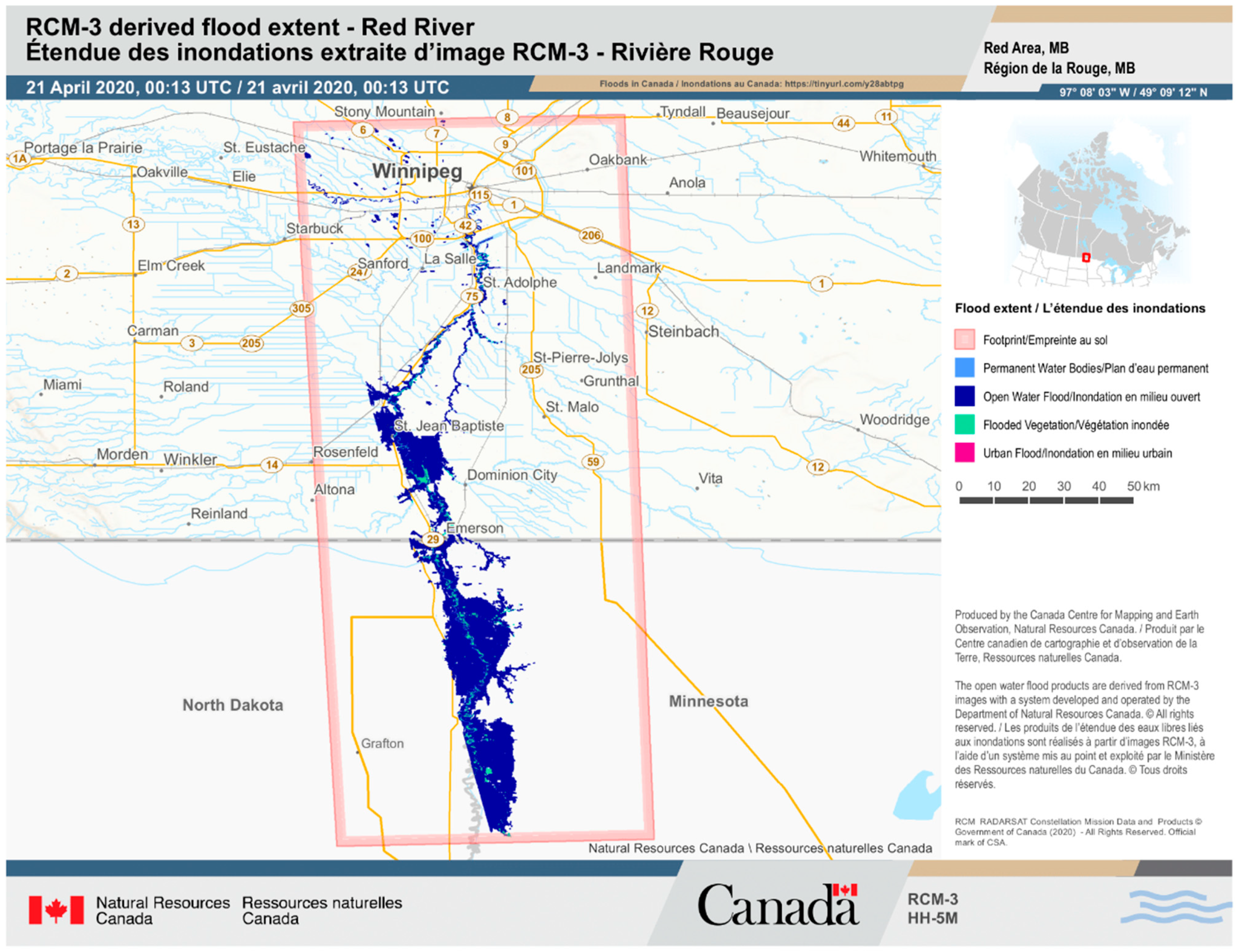
3.1. Flood Response
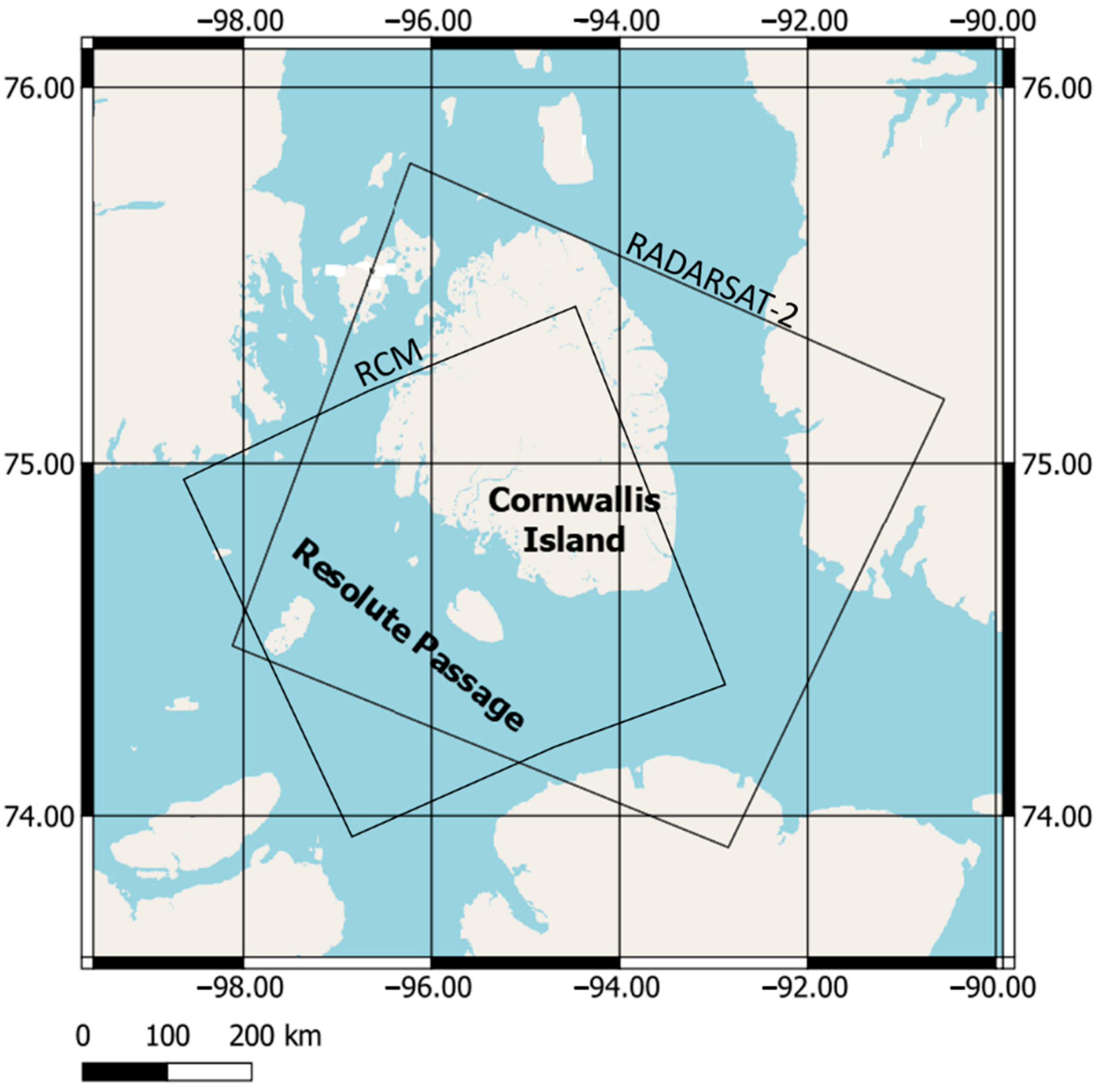
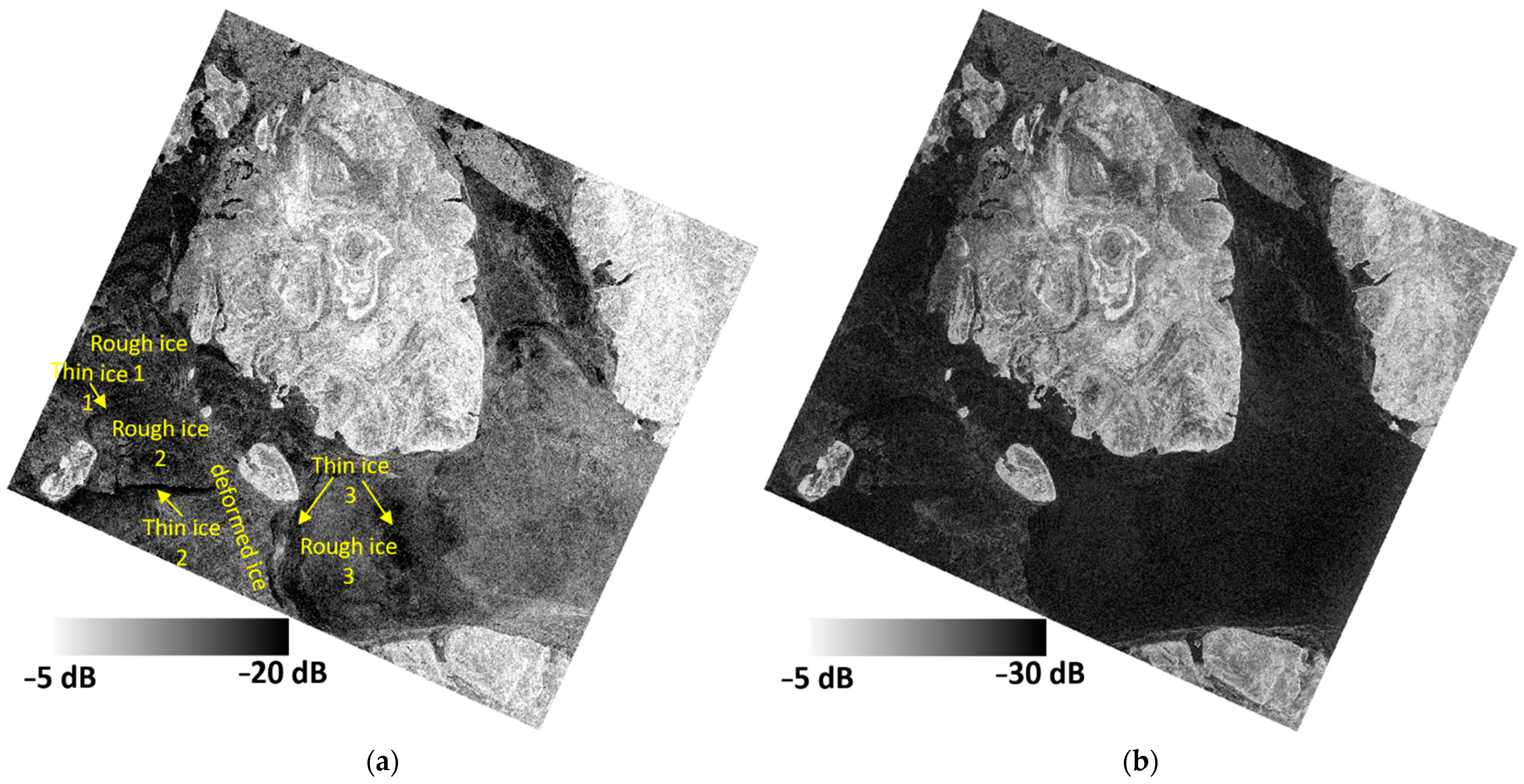
3.2. Sea Ice Analysis
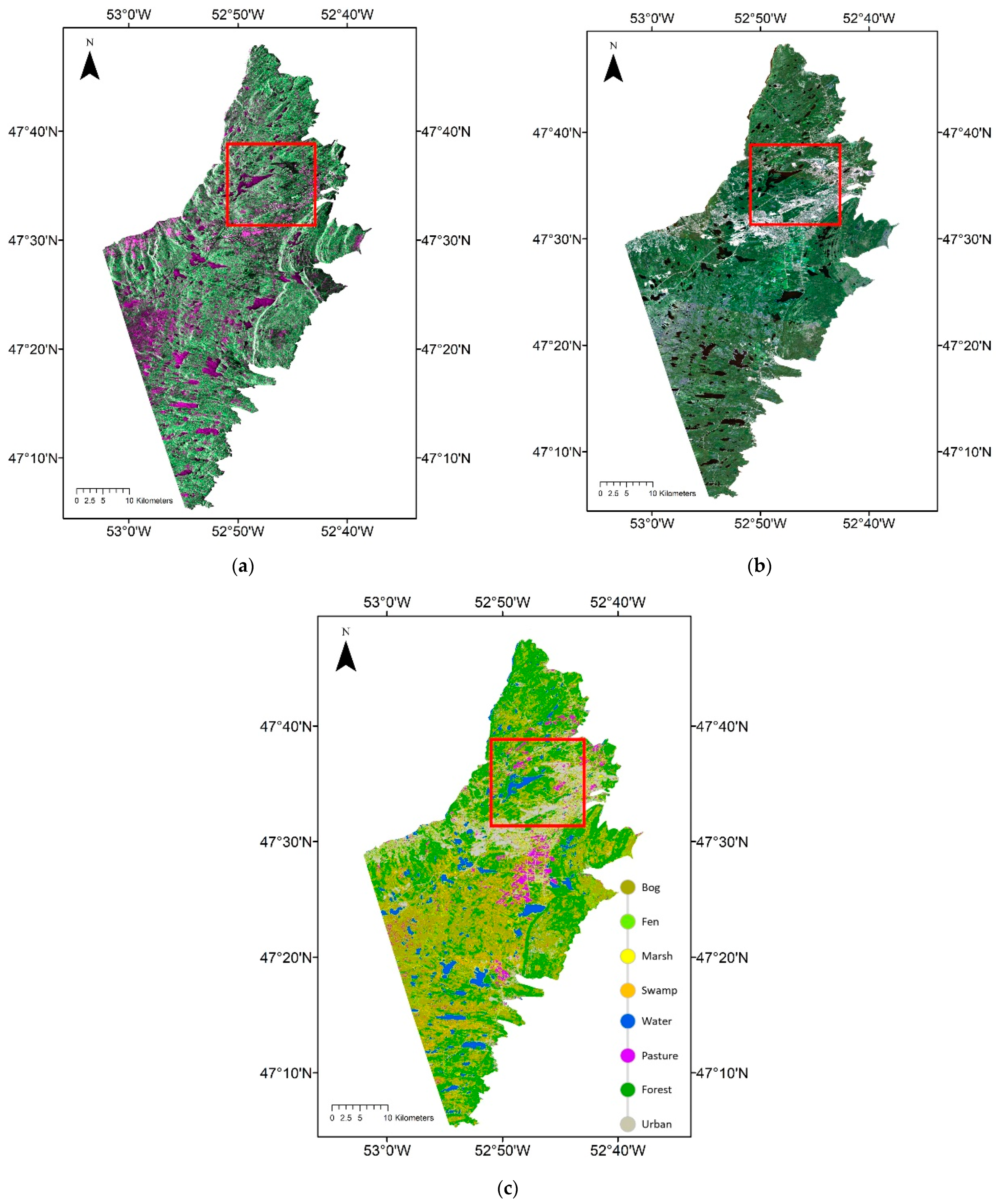
3.3. Wetland Monitoring
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Séguin, G.; Ahmed, S. RADARSAT constellation, project objectives and status. In Proceedings of the 2009 IEEE International Geoscience and Remote Sensing Symposium, Cape Town, South Africa, 12–17 July 2009; pp. 894–897. [Google Scholar]
- Dabboor, M.; Iris, S.; Singhroy, V. The RADARSAT Constellation Mission in Support of Environmental Applications. Proceedings 2018, 2, 323. [Google Scholar] [CrossRef] [Green Version]
- Raney, R.K. Hybrid-polarity SAR architecture. IEEE Trans. Geosci. Remote Sens. 2007, 45, 3397–3404. [Google Scholar] [CrossRef] [Green Version]
- Charbonneau, F.; Brian, B.; Raney, K.; McNairn, H.; Liu, C.; Vachon, P.; Shang, J.; De Abreu, R.; Champagne, C.; Merzouki, A.; et al. Compact polarimetry overview and applications assessment. Can. J. Remote Sens. 2010, 36, S298–S315. [Google Scholar] [CrossRef]
- Dabboor, M.; Geldsetzer, T. Towards sea ice classification using simulated RADARSAT constellation mission compact polarimetric SAR imagery. Remote Sens. Environ. 2014, 140, 189–195. [Google Scholar] [CrossRef]
- Geldsetzer, T.; Arkett, M.; Zagon, T.; Charbonneau, F.; Yackel, J.; Scharien, R. All-season compact-polarimetry C-band SAR observations of sea ice. Can. J. Remote Sens. 2015, 41, 485–504. [Google Scholar] [CrossRef]
- Dabboor, M.; Montpetit, B.; Howell, S. Assessment of the high resolution SAR mode of the RADARSAT constellation mission for first year ice and multiyear ice characterization. Remote Sens. 2018, 10, 594. [Google Scholar] [CrossRef] [Green Version]
- Denbina, M.; Collins, M.J.; Atteia, G. On the detection and discrimination of ships and icebergs using simulated dual-polarized RADARSAT constellation data. Can. J. Remote Sens. 2015, 41, 363–379. [Google Scholar] [CrossRef]
- Geldsetzer, T.; Charbonneau, F.; Arkett, M.; Zagon, T. Ocean wind study using simulated RCM compact-polarimetry SAR. Can. J. Remote Sens. 2015, 41, 418–430. [Google Scholar] [CrossRef]
- Geldsetzer, T.; Khurshid, S.K.; Warner, K.; Botelho, F.; Flett, D. Wind speed retrieval from simulated RADARSAT constellation mission compact polarimetry SAR data for marine Application. Remote Sens. 2019, 11, 1682. [Google Scholar] [CrossRef] [Green Version]
- Dabboor, M.; Singha, S.; Montpetit, B.; Deschamps, B.; Flett, D. Pre-launch assessment of RADARSAT constellation mission medium resolution modes for sea oil slicks and lookalike discrimination. Can. J. Remote Sens. 2019, 45, 530–549. [Google Scholar] [CrossRef] [Green Version]
- Dabboor, M.; White, L.; Brisco, B.; Charbonneau, F. Change detection with compact polarimetric SAR for monitoring wetlands. Can. J. Remote Sens. 2015, 41, 408–417. [Google Scholar] [CrossRef]
- Dabboor, M.; Banks, S.; White, L.; Brisco, B.; Behnamian, A.; Chen, Z.; Murnaghan, K. Comparison of compact and fully polarimetric SAR for multitemporal wetland monitoring. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 12, 1417–1430. [Google Scholar] [CrossRef]
- Olthof, I.; Rainville, T. Evaluating simulated RADARSAT constellation mission (RCM) compact polarimetry for open-water and flooded-vegetation wetland mapping. Remote Sens. 2020, 12, 1476. [Google Scholar] [CrossRef]
- Kroupnik, G.; De Lisle, D.; Côté, S.; Lapointe, M.; Casgrain, C.; Fortier, R. RADARSAT constellation mission overview and status. In Proceedings of the 2021 IEEE Radar Conference (RadarConf21), Atlanta, GA, USA, 7–14 May 2021; pp. 1–5. [Google Scholar]
- Olthof, I.; Tolszczuk-Leclerc, S.; Lehrbass, B.; Shelat, Y.; Neufeld, V.; Decker, V. New Flood Mapping Methods Implemented during the 2017 Spring Flood Activation in Southern Quebec; Geomatics Canada: Chatham-Kent, ON, Canada, 2018. [Google Scholar]
- Pekel, J.F.; Cottam, A.; Gorelick, N.; Belward, A. High-resolution mapping of global surface water and its long-term changes. Nature 2016, 540, 418–422. [Google Scholar] [CrossRef]
- Ghosh, A.; Manwani, N.; Sastry, P.S. On the robustness of decision tree learning under label noise. In Advances in Knowledge Discovery and Data Mining; Kim, J., Shim, K., Cao, L., Lee, J.G., Lin, X., Moon, Y.S., Eds.; Springer: Berlin/Heidelberg, Germany, 2017; Volume 10234, pp. 685–697. [Google Scholar]
- Frénay, B.; Verleysen, M. Classification in the presence of label noise: A survey. IEEE Trans. Neural Netw. Learn. Syst. 2014, 25, 845–869. [Google Scholar] [CrossRef] [PubMed]
- Brisco, B.; Short, N.; Van der Sanden, J.; Landry, R.; Raymond, D. A semi-automated tool for surface water mapping with RADARSAT-1. Can. J. Remote Sens. 2009, 35, 336–344. [Google Scholar] [CrossRef]
- Hess, L.L.; Melack, J.M.; Simonett, D.S. Radar detection of flood beneath the forest canopy: A review. Int. J. Remote Sens. 1990, 11, 1313–1325. [Google Scholar] [CrossRef]
- Olthof, I. Mapping seasonal inundation frequency (1985–2016) along the St-John River, New Brunswick, Canada using the Landsat archive. Remote Sens. 2017, 9, 143. [Google Scholar] [CrossRef]
- Frazier, P.S.; Page, K.J. Water body detection and delineation with Landsat TM data. Photogramm. Eng. Remote Sens. 2000, 66, 1461–1467. [Google Scholar]
- Mohammadimanesh, F.; Salehi, B.; Mahdianpari, M.; Brisco, B.; Gill, E. Full and Simulated Compact Polarimetry SAR Responses to Canadian Wetlands: Separability Analysis and Classification. Remote Sens. 2019, 11, 516. [Google Scholar] [CrossRef] [Green Version]
- Mahdianpari, M.; Salehi, B.; Mohammadimanesh, F.; Brisco, B. An Assessment of simulated compact polarimetric SAR data for wetland classification using random forest algorithm. Can. J. Remote Sens. 2017, 43, 468–484. [Google Scholar] [CrossRef]
- Mahdianpari, M.; Salehi, B.; Mohammadimanesh, F.; Motagh, M. Random forest wetland classification using ALOS-2 L-Band, RADARSAT-2 C-Band, and TerraSAR-X imagery. ISPRS J. Photogramm. Remote Sens. 2017, 130, 13–31. [Google Scholar] [CrossRef]
- Mahdianpari, M.; Mohammadimanesh, F.; McNairn, H.; Davidson, A.; Rezaee, M.; Salehi, B.; Homayouni, S. Mid-season crop classification using dual-, compact-, and full-polarization in preparation for the RADARSAT constellation mission (RCM). Remote Sens. 2019, 11, 1582. [Google Scholar] [CrossRef] [Green Version]
- Mohammadimanesh, F.; Salehi, B.; Mahdianpari, M.; Brisco, B.; Motagh, M. Multi-temporal, multi-frequency, and multi-polarization coherence and SAR backscatter analysis of wetlands. ISPRS J. Photogramm. Remote Sens. 2018, 142, 78–93. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Imaging Beam Mode | Nom. Res. (m) | Swath Width (km) | #Looks (rng × az) | Noise Floor (dB) |
|---|---|---|---|---|
| Low Resolution 100 m (ScanSAR) | 100 | 500 | 8 × 1 | −22 |
| Medium Resolution 50 m (ScanSAR) | 50 | 350 | 4 × 1 | −22 |
| Medium Resolution 30 m (ScanSAR) | 30 | 125 | 2 × 2 | −24 |
| Medium Resolution 16 m (StripMap) | 16 | 30 | 1 × 4 | −25 |
| High Resolution 5 m (StripMap) | 5 | 30 | 1 × 1 | −19 |
| Very High Resolution 3 m (StripMap) | 3 | 20 | 1 × 1 | −17 |
| Low Noise (ScanSAR) | 100 | 350 | 4 × 2 | −25 |
| Ship Detection (ScanSAR) | Variable | 350 | Variable | Variable |
| Quad-Polarization (StripMap) | 9 | 20 | 1 × 1 | −25 |
| Spotlight | 1 (az) × 3 (rng) | 5 | 1 × 1 | −17 |
| Spacecraft Number | Date (UTC) | Time (hhmmss) | Imaging Beam | Polarization |
|---|---|---|---|---|
| RCM-1 | 14/04/2020 | 002049 | HR5M | HH-HV |
| RCM-3 | 15/04/2020 | 123922 | HR5M | HH-HV |
| RCM-3 | 16/04/2020 | 124741 | HR5M | HH-HV |
| RCM-2 | 16/04/2020 | 000503 | HR5M | HH-HV |
| RCM-2 | 17/04/2020 | 001301 | HR5M | HH-HV |
| RCM-1 | 19/04/2020 | 123923 | HR5M | HH-HV |
| RCM-1 | 19/04/2020 | 123859 | HR5M | HH-HV |
| RCM-3 | 20/04/2020 | 000514 | HR5M | HH-HV |
| RCM-3 | 21/04/2020 | 001312 | HR5M | HH-HV |
| RCM-3 | 22/04/2020 | 002112 | HR5M | HH-HV |
| RCM-3 | 23/04/2020 | 002911 | HR5M | HH-HV |
| RCM-2 | 23/04/2020 | 123927 | HR5M | HH-HV |
| RCM-2 | 23/04/2020 | 123936 | HR5M | HH-HV |
| RCM-1 | 24/04/2020 | 000523 | HR5M | HH-HV |
| RCM-1 | 27/04/2020 | 002849 | HR5M | HH-HV |
| RCM-2 | 30/04/2020 | 002100 | HR5M | HH-HV |
| RCM-2 | 05/05/2020 | 123911 | HR5M | HH-HV |
| RCM-1 | 06/05/2020 | 000452 | HR5M | HH-HV |
| RCM-3 | 09/05/2020 | 123922 | HR5M | HH-HV |
| RCM-2 | 10/05/2020 | 000504 | HR5M | HH-HV |
| RADARSAT-2 | RCM | |
|---|---|---|
| Product | ScanSAR Georeferenced Fine Resolution (SGF) | SC30M Ground Range Detected (GRD) |
| Acquisition Date | 19 March 2020 | 29 March 2020 |
| Orbit Direction | Descending | Ascending |
| Polarization | HH, HV | RH, RV |
| Number of Looks | 1 × 4 | 2 × 2 |
| Incidence Angle | Near range = 19.5°, Far range = 31.2° | Near range = 17.2°, Far range = 28.9° |
| Spatial Resolution | 30 m | 30 m |
| RH (dB) | RV (dB) | |||||
| Thin Ice | Rough Ice | Deformed Ice | Thin Ice | Rough Ice | Deformed Ice | |
| Mean | −9.71 | −7.75 | −6.37 | −9.83 | −7.76 | −6.43 |
| Stdev | 1.19 | 1.16 | 1.25 | 1.10 | 1.17 | 1.27 |
| HH (dB) | HV (dB) | |||||
| Thin Ice | Rough Ice | Deformed Ice | Thin Ice | Rough Ice | Deformed Ice | |
| Mean | −16.55 | −16.46 | −14.51 | −26.83 | −26.27 | −24.91 |
| Stdev | 2.17 | 2.13 | 2.19 | 1.56 | 1.65 | 2.13 |
| RH (dB) | RV (dB) | ||||
| Thin Ice—Rough Ice | Thin Ice—Deformed Ice | Rough Ice—Deformed Ice | Thin Ice—Rough Ice | Thin Ice—Deformed Ice | Rough Ice—Deformed Ice |
| 1.96 | 3.34 | 1.38 | 2.07 | 3.40 | 1.33 |
| HH (dB) | HV (dB) | ||||
| Thin Ice—Rough Ice | Thin Ice—Deformed Ice | Rough Ice—Deformed Ice | Thin Ice—Rough Ice | Thin Ice—Deformed Ice | Rough Ice—Deformed Ice |
| 0.09 | 2.04 | 1.95 | 0.56 | 1.92 | 1.36 |
| Bog | Fen | Marsh | Swamp | Forest | Urban | Pasture | Water | UA (%) | |
|---|---|---|---|---|---|---|---|---|---|
| Bog | 15,917 | 5811 | 213 | 19 | 974 | 3 | 31 | 0 | 69.30 |
| Fen | 3271 | 18,191 | 27 | 1005 | 27 | 8 | 54 | 0 | 80.55 |
| Marsh | 134 | 101 | 7599 | 211 | 94 | 14 | 112 | 393 | 87.77 |
| Swamp | 125 | 66 | 118 | 4987 | 779 | 6 | 0 | 0 | 82.01 |
| Forest | 212 | 381 | 1301 | 73 | 8644 | 0 | 0 | 0 | 81.46 |
| Urban | 0 | 17 | 0 | 0 | 27 | 10,309 | 0 | 0 | 99.58 |
| Pasture | 0 | 0 | 0 | 0 | 0 | 0 | 5461 | 0 | 100.00 |
| Water | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 88,966 | 100.00 |
| PA (%) | 80.97 | 74.50 | 82.08 | 79.22 | 81.97 | 99.70 | 96.52 | 99.56 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 Copyright of the Crown in Canada. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dabboor, M.; Olthof, I.; Mahdianpari, M.; Mohammadimanesh, F.; Shokr, M.; Brisco, B.; Homayouni, S. The RADARSAT Constellation Mission Core Applications: First Results. Remote Sens. 2022, 14, 301. https://doi.org/10.3390/rs14020301
Dabboor M, Olthof I, Mahdianpari M, Mohammadimanesh F, Shokr M, Brisco B, Homayouni S. The RADARSAT Constellation Mission Core Applications: First Results. Remote Sensing. 2022; 14(2):301. https://doi.org/10.3390/rs14020301
Chicago/Turabian StyleDabboor, Mohammed, Ian Olthof, Masoud Mahdianpari, Fariba Mohammadimanesh, Mohammed Shokr, Brian Brisco, and Saeid Homayouni. 2022. "The RADARSAT Constellation Mission Core Applications: First Results" Remote Sensing 14, no. 2: 301. https://doi.org/10.3390/rs14020301
APA StyleDabboor, M., Olthof, I., Mahdianpari, M., Mohammadimanesh, F., Shokr, M., Brisco, B., & Homayouni, S. (2022). The RADARSAT Constellation Mission Core Applications: First Results. Remote Sensing, 14(2), 301. https://doi.org/10.3390/rs14020301