
Laser Ranging Bathymetry Using a Photon-Number-Resolving Detector



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
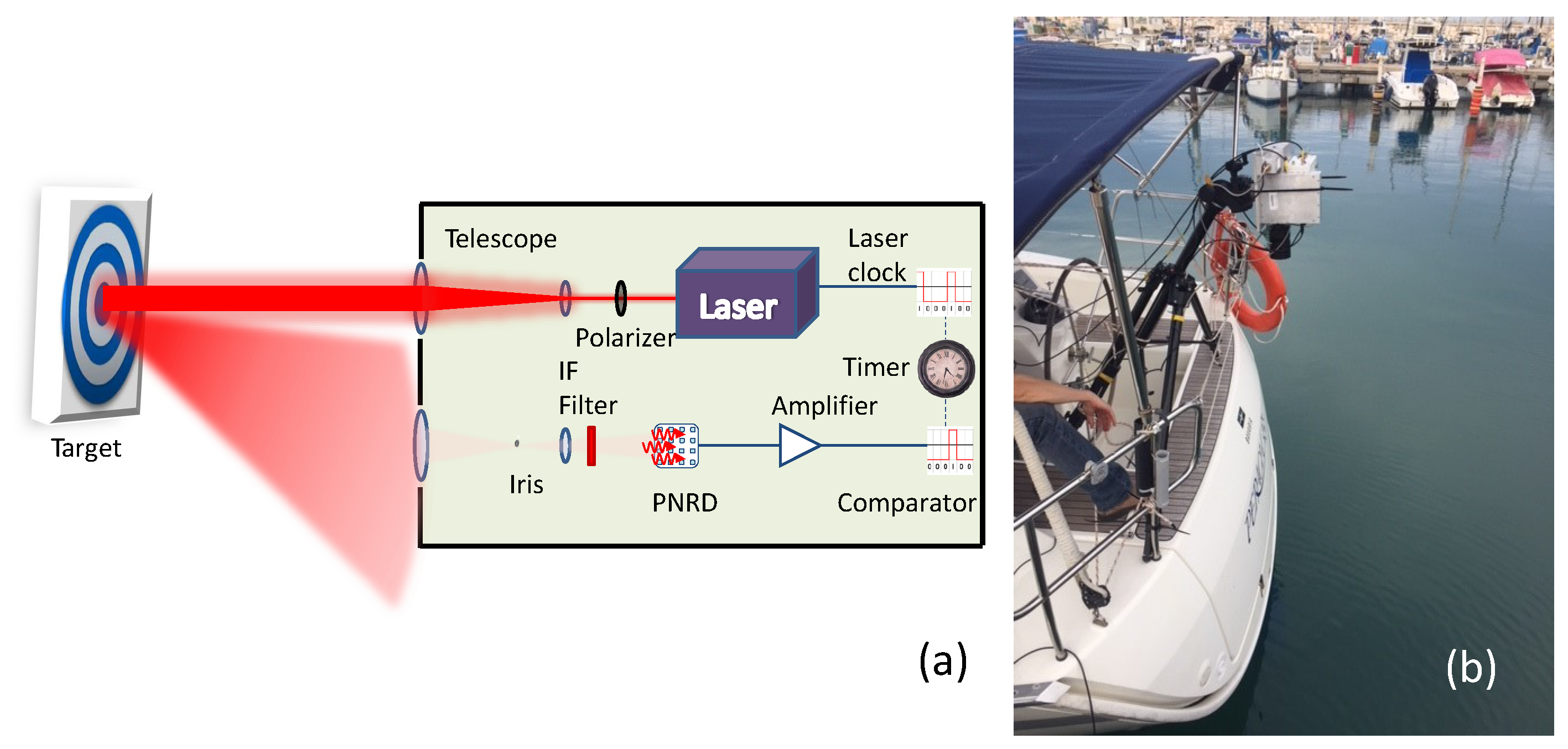
2. Methods
3. Results and Discussion
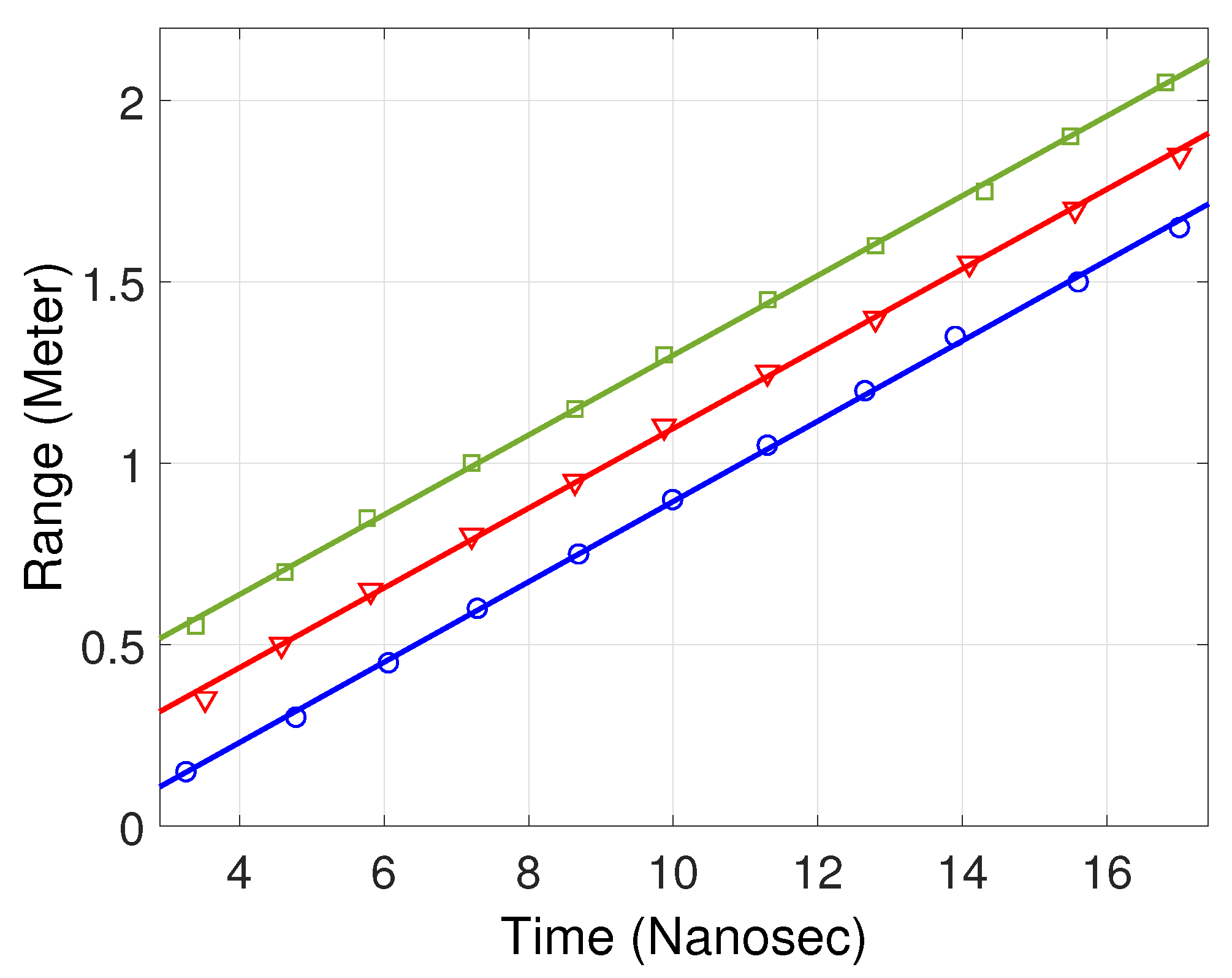
3.1. Refractive Index
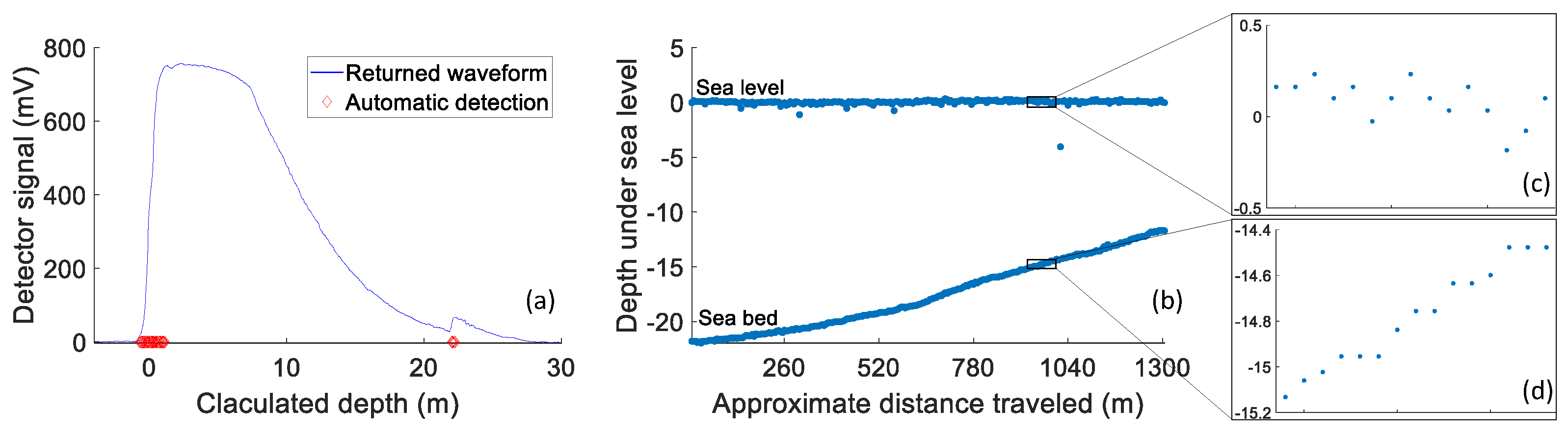
3.2. Seabed Depth Ranging
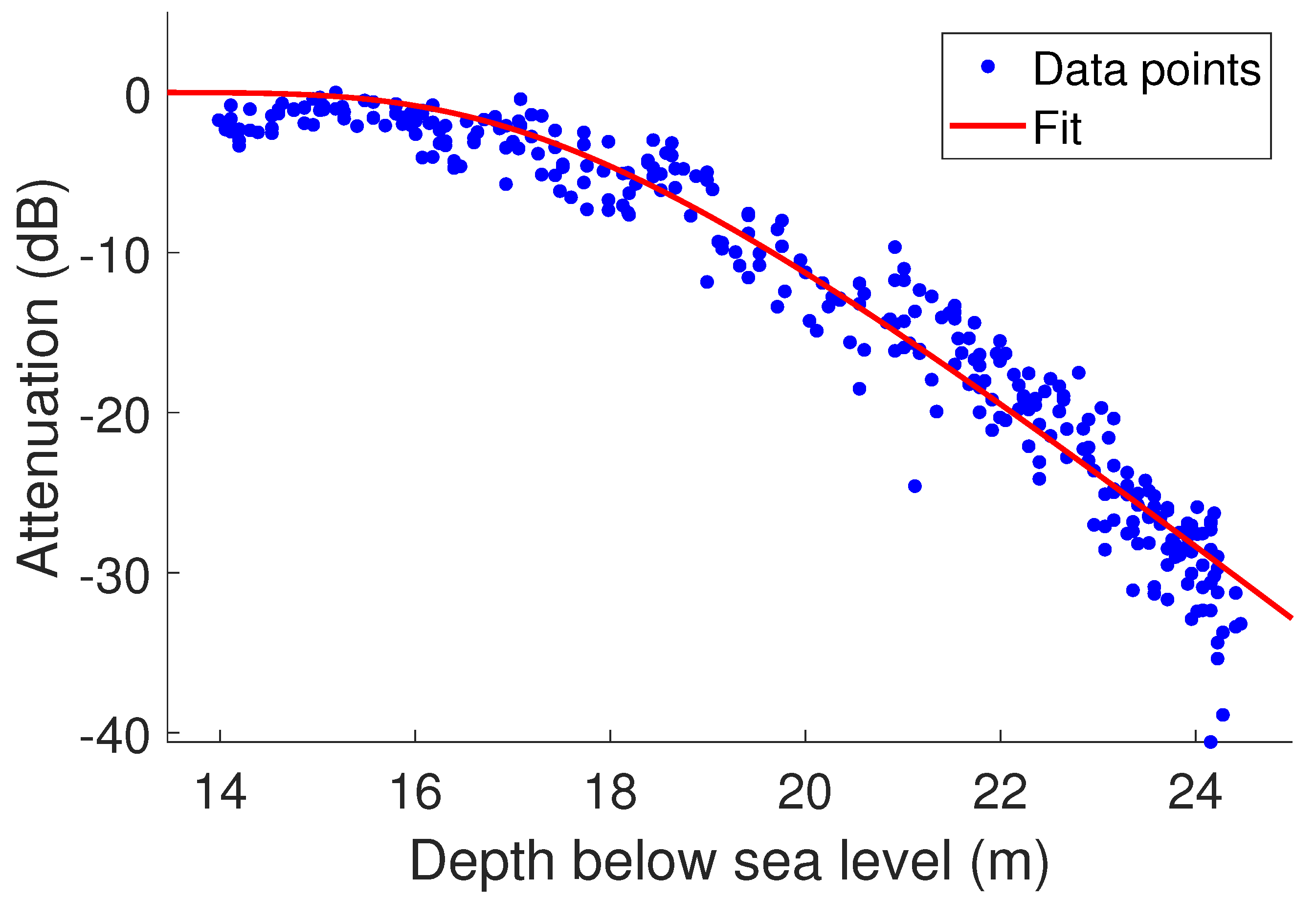
3.3. Optical Attenuation in Seawater
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| LIDAR | light detection and ranging |
| PRND | photon-number-resolving detector |
| SiPM | silicon photo-multiplier |
| USB | universal serial bus |
| nm | nanometers |
| ns | nanoseconds |
Appendix A

References
- Kostamovaara, J.T.; Maatta, K.E.; Myllylae, R.A. Pulsed time-of-flight laser range-finding techniques for industrial applications. In Optics, Illumination, and Image Sensing for Machine Vision VI; International Society for Optics and Photonics: Bellingham, WA, USA, 1992; Volume 1614, pp. 283–295. [Google Scholar]
- Li, Z.P.; Ye, J.T.; Huang, X.; Jiang, P.Y.; Cao, Y.; Hong, Y.; Yu, C.; Zhang, J.; Zhang, Q.; Peng, C.Z.; et al. Single-photon imaging over 200 km. Optica 2021, 8, 344–349. [Google Scholar] [CrossRef]
- Howland, G.A.; Lum, D.J.; Ware, M.R.; Howell, J.C. Photon counting compressive depth mapping. Opt. Express 2013, 21, 23822–23837. [Google Scholar] [CrossRef] [PubMed]
- Pawlikowska, A.M.; Halimi, A.; Lamb, R.A.; Buller, G.S. Single-photon three-dimensional imaging at up to 10 km range. Opt. Express 2017, 25, 11919–11931. [Google Scholar] [CrossRef] [PubMed]
- Sher, Y.; Cohen, L.; Istrati, D.; Eisenberg, H.S. Low intensity LiDAR using compressed sensing and a photon number resolving detector. In Emerging Digital Micromirror Device Based Systems and Applications X; International Society for Optics and Photonics: Bellingham, WA, USA, 2018; Volume 10546, p. 105460J. [Google Scholar]
- Cohen, L.; Matekole, E.S.; Sher, Y.; Istrati, D.; Eisenberg, H.S.; Dowling, J.P. Thresholded Quantum LIDAR: Exploiting Photon-Number-Resolving Detection. Phys. Rev. Lett. 2019, 123, 203601. [Google Scholar] [CrossRef] [PubMed]
- Mullen, L.J.; Vieira, A.J.; Herezfeld, P.; Contarino, V.M. Application of RADAR technology to aerial LIDAR systems for enhancement of shallow underwater target detection. IEEE Trans. Microw. Theory Tech. 1995, 43, 2370–2377. [Google Scholar] [CrossRef]
- McLeod, D.; Jacobson, J.; Hardy, M.; Embry, C. Autonomous inspection using an underwater 3D LiDAR. In Proceedings of the 2013 OCEANS-San Diego, San Diego, CA, USA, 24–26 September 2013; pp. 1–8. [Google Scholar]
- Churnside, J.H. Review of profiling oceanographic lidar. Opt. Eng. 2013, 53, 051405. [Google Scholar] [CrossRef]
- Smith Menandro, P.; Cardoso Bastos, A. Seabed mapping: A brief history from meaningful words. Geosciences 2020, 10, 273. [Google Scholar] [CrossRef]
- Dillon, J.; Steele, S.M.; Charron, R.; Shea, D.; Smith, N.; Albiez, J.; Duda, A. Synthetic Aperture Sonar Nadir Gap Coverage with Centimetric Resolution. In Proceedings of the Global Oceans 2020: Singapore–US Gulf Coast, Virtual, 5–31 October 2020; pp. 1–6. [Google Scholar]
- Mack, K.V.; Jemison, W.D.; Rumbaugh, L.K.; Illig, D.W.; Banavar, M.K. Time-of-flight (ToF) cameras for underwater situational awareness. In Proceedings of the OCEANS 2019 MTS/IEEE SEATTLE, Washington, DC, USA, 16–19 September 2019; pp. 1–5. [Google Scholar]
- Klepsvik, J.; Torsen, H.; Thoresen, K. Laser imaging technology for subsea inspection: Principles and applications. In Proceedings of the Intervention Sous-Marine, Rosenberg, TX, USA, 3–5 December 1990; pp. 317–332. [Google Scholar]
- Zhang, X.; Ma, Y.; Zhang, J. Shallow water bathymetry based on inherent optical properties using high spatial resolution multispectral imagery. Remote Sens. 2020, 12, 3027. [Google Scholar] [CrossRef]
- Minghelli, A.; Vadakke-Chanat, S.; Chami, M.; Guillaume, M.; Migne, E.; Grillas, P.; Boutron, O. Estimation of bathymetry and benthic habitat composition from hyperspectral remote sensing data (BIODIVERSITY) using a semi-analytical approach. Remote Sens. 2021, 13, 1999. [Google Scholar] [CrossRef]
- Dolgoshein, B.; Balagura, V.; Buzhan, P.; Danilov, M.; Filatov, L.; Garutti, E.; Groll, M.; Ilyin, A.; Kantserov, V.; Kaplin, V.; et al. Status report on silicon photomultiplier development and its applications. Nucl. Instrum. Methods Phys. Res. Sect. A Accel. Spectrometers Detect. Assoc. Equip. 2006, 563, 368–376. [Google Scholar] [CrossRef]
- Hamamatsu Photonics, K. MPPC® (Multi-Pixel Photon Counter)—S13360 Series. Available online: https://www.hamamatsu.com/resources/pdf/ssd/s13360_series_kapd1052e.pdf (accessed on 10 March 2019).
- DRS4 Evaluation Board. 2013. Available online: https://www.psi.ch/en/drs/evaluation-board (accessed on 18 September 2022).
- Quan, X.; Fry, E.S. Empirical equation for the index of refraction of seawater. Appl. Opt. 1995, 34, 3477–3480. [Google Scholar] [CrossRef] [PubMed]
- Berwald, J.; Stramski, D.; Mobley, C.D.; Kiefer, D.A. Influences of absorption and scattering on vertical changes in the average cosine of the underwater light field. Limnol. Oceanogr. 1995, 40, 1347–1357. [Google Scholar] [CrossRef]
- Dovrat, L.; Bakstein, M.; Istrati, D.; Eisenberg, H. Simulations of photon detection in silicon photomultiplier number-resolving detectors. Phys. Scr. 2012, 2012, 014010. [Google Scholar] [CrossRef]
- Cochenour, B.; Mullen, L.; Muth, J. Modulated pulse laser with pseudorandom coding capabilities for underwater ranging, detection, and imaging. Appl. Opt. 2011, 50, 6168–6178. [Google Scholar] [CrossRef] [PubMed]




Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cohen, L.; Istrati, D.; Sher, Y.; Brand, Z.; Eisenberg, H.S. Laser Ranging Bathymetry Using a Photon-Number-Resolving Detector. Remote Sens. 2022, 14, 4750. https://doi.org/10.3390/rs14194750
Cohen L, Istrati D, Sher Y, Brand Z, Eisenberg HS. Laser Ranging Bathymetry Using a Photon-Number-Resolving Detector. Remote Sensing. 2022; 14(19):4750. https://doi.org/10.3390/rs14194750
Chicago/Turabian StyleCohen, Lior, Daniel Istrati, Yoni Sher, Zev Brand, and Hagai S. Eisenberg. 2022. "Laser Ranging Bathymetry Using a Photon-Number-Resolving Detector" Remote Sensing 14, no. 19: 4750. https://doi.org/10.3390/rs14194750
APA StyleCohen, L., Istrati, D., Sher, Y., Brand, Z., & Eisenberg, H. S. (2022). Laser Ranging Bathymetry Using a Photon-Number-Resolving Detector. Remote Sensing, 14(19), 4750. https://doi.org/10.3390/rs14194750