
Branch Identification and Junction Points Location for Apple Trees Based on Deep Learning


Abstract
:1. Introduction
- (1)
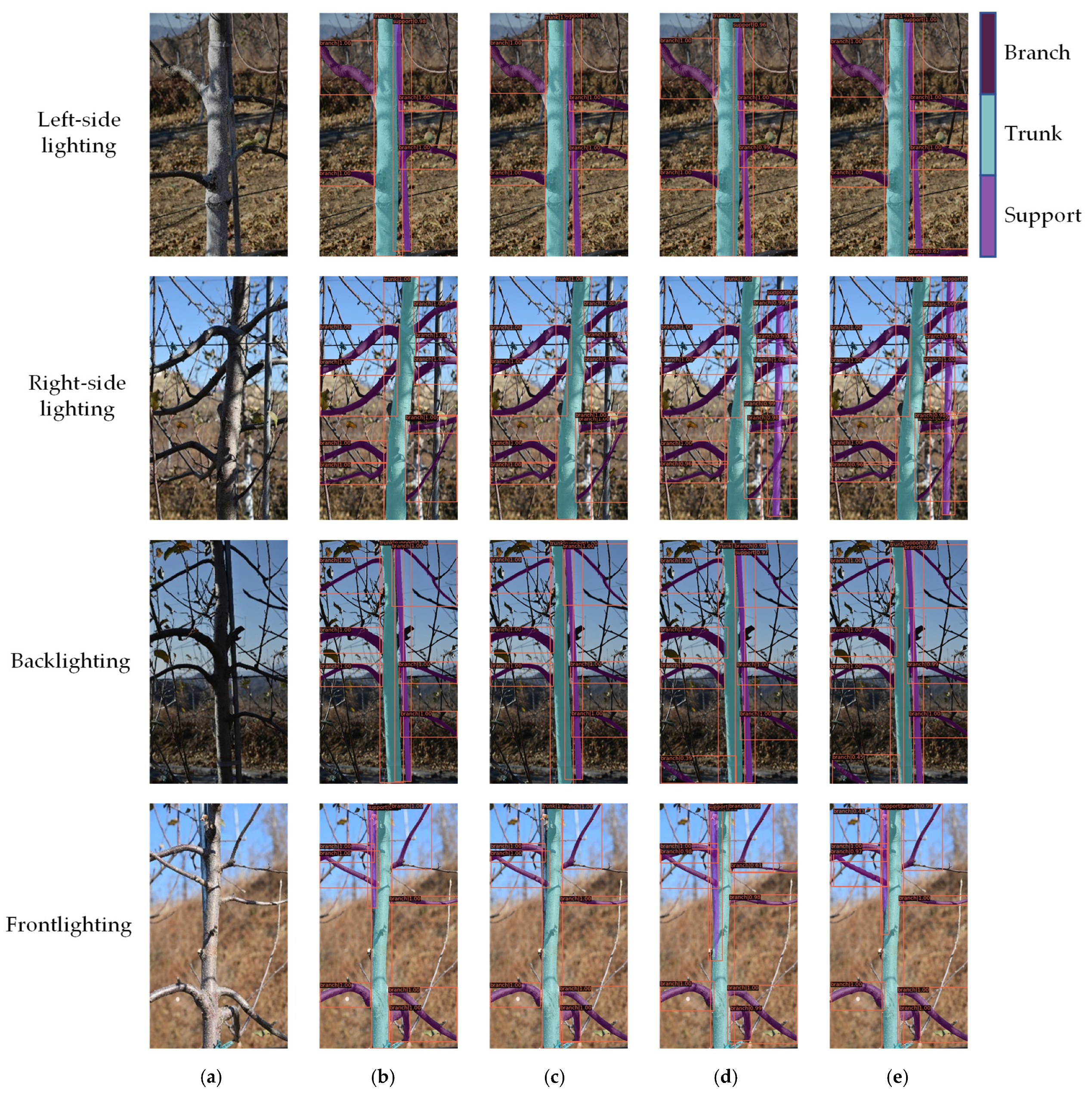
- Based on the above backbone and model, the detection and segmentation effects of the four algorithms (Mask R-CNN Resnet50, Mask R-CNN R50; Mask R-CNN Swin-T, Mask R-CNN SW-T; Cascade Mask R-CNN Resnet50, Cascade Mask R-CNN R50; and Cascade Mask R-CNN Swin-T, Cascade Mask R-CNN SW-T) on apple tree trunks, primary branches and supports in the orchard environment are compared to find the optimal one.
- (2)
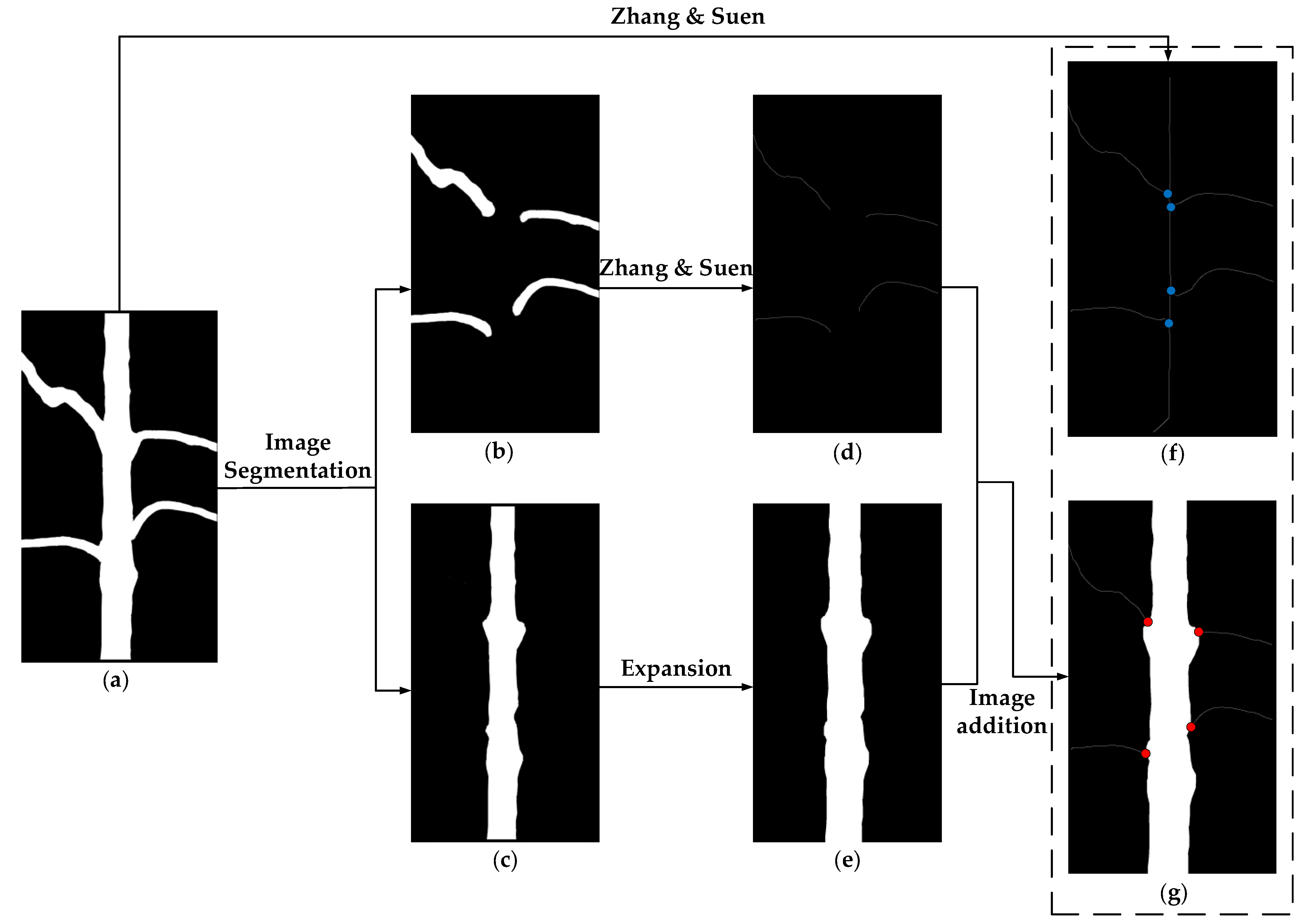
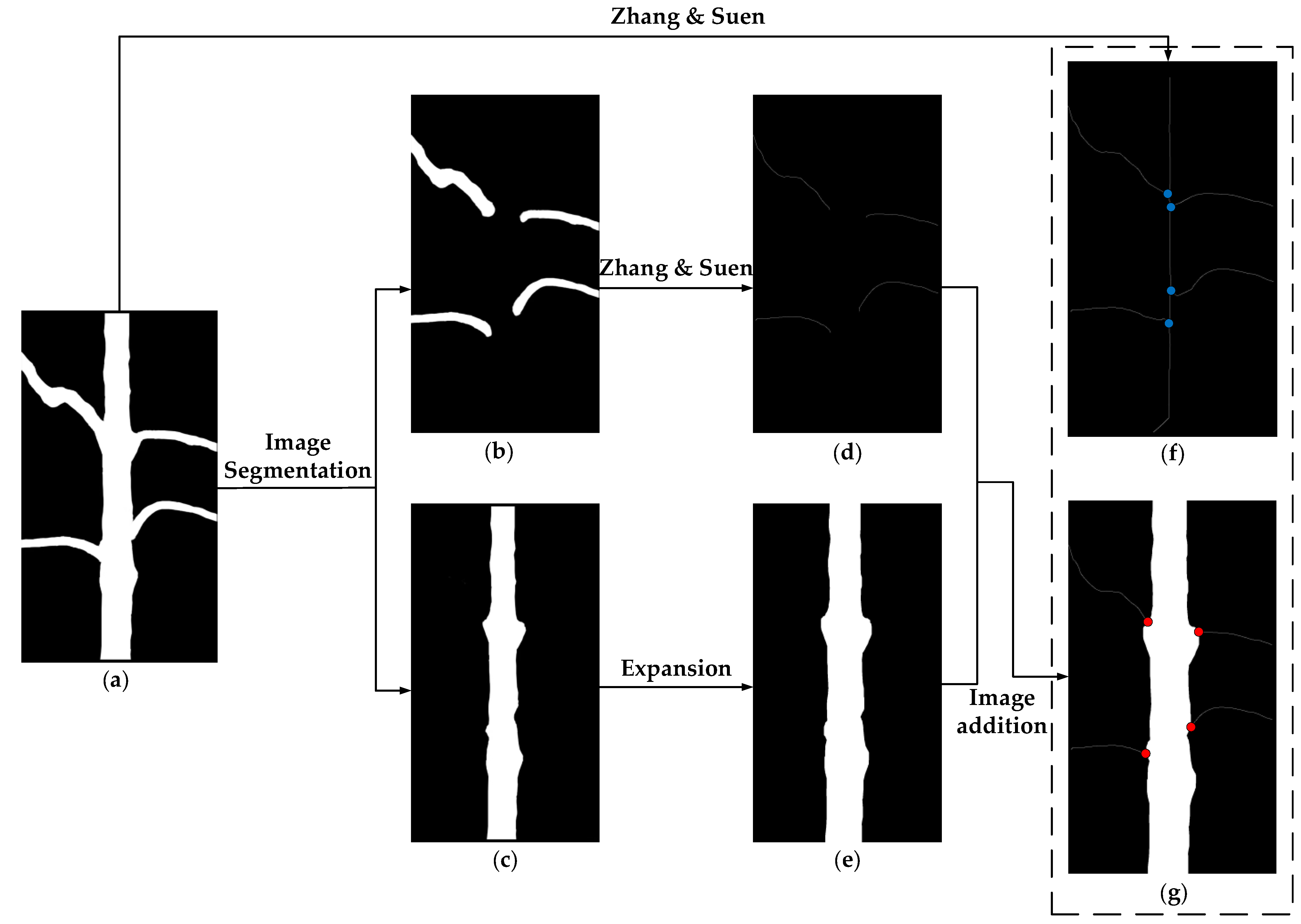
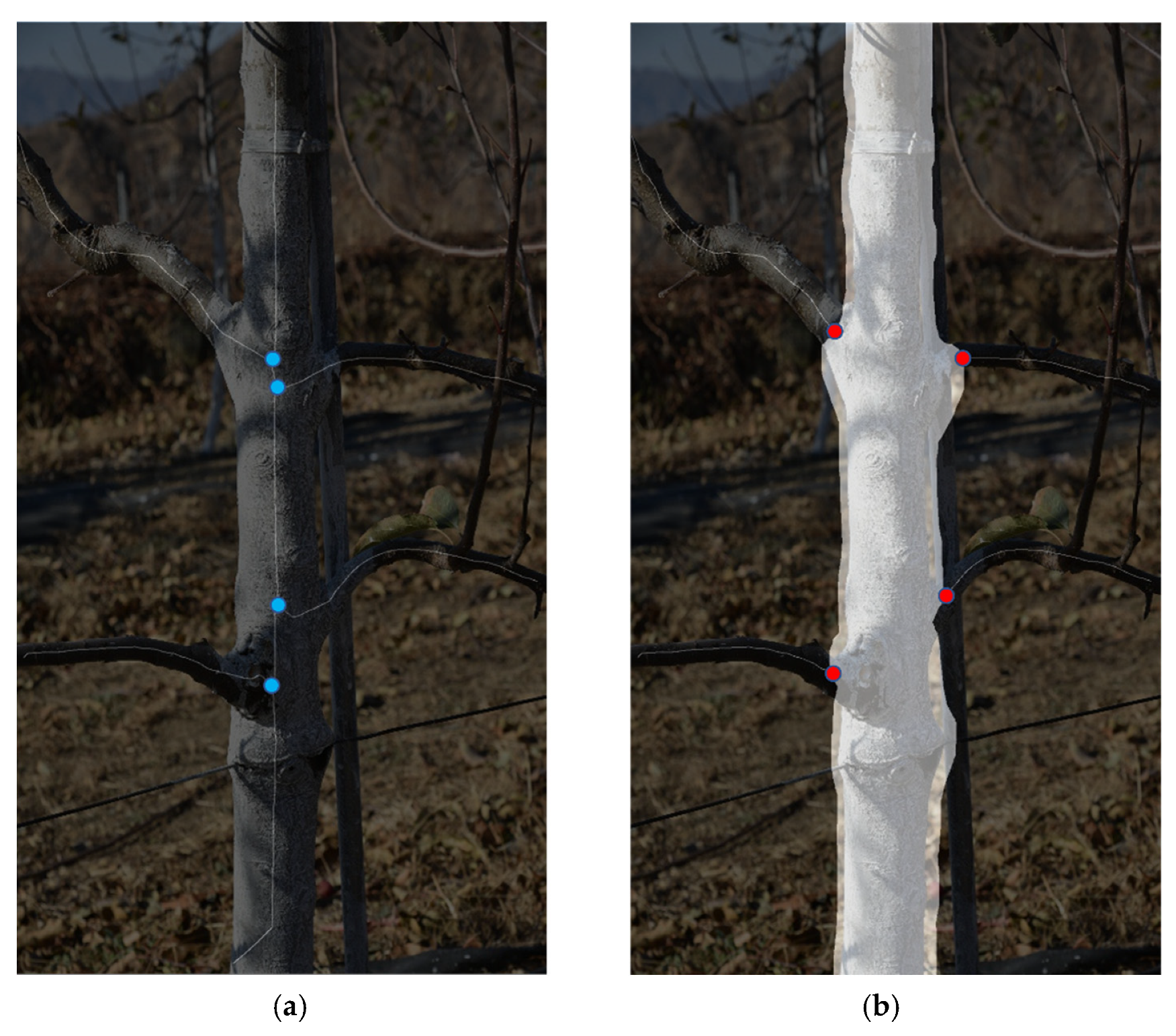
- According to the segmentation results obtained by the optimal algorithm, the skeleton structure of the apple tree is constructed with the support of a skeletonization algorithm, so as to locate the junction points between the trunk and the primary branch.
2. Materials and Methods
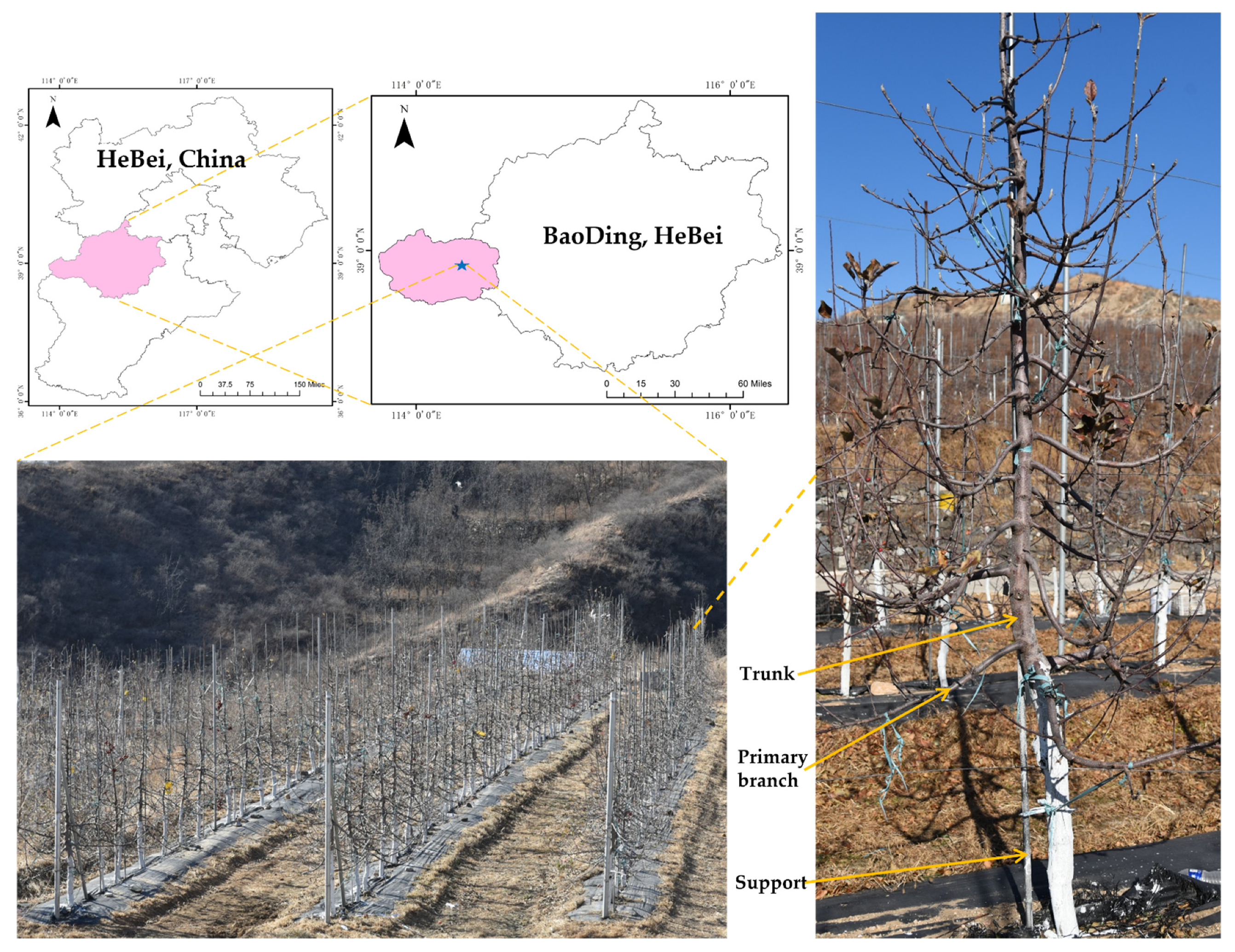
2.1. Experimental Site
2.2. Data Acquisition
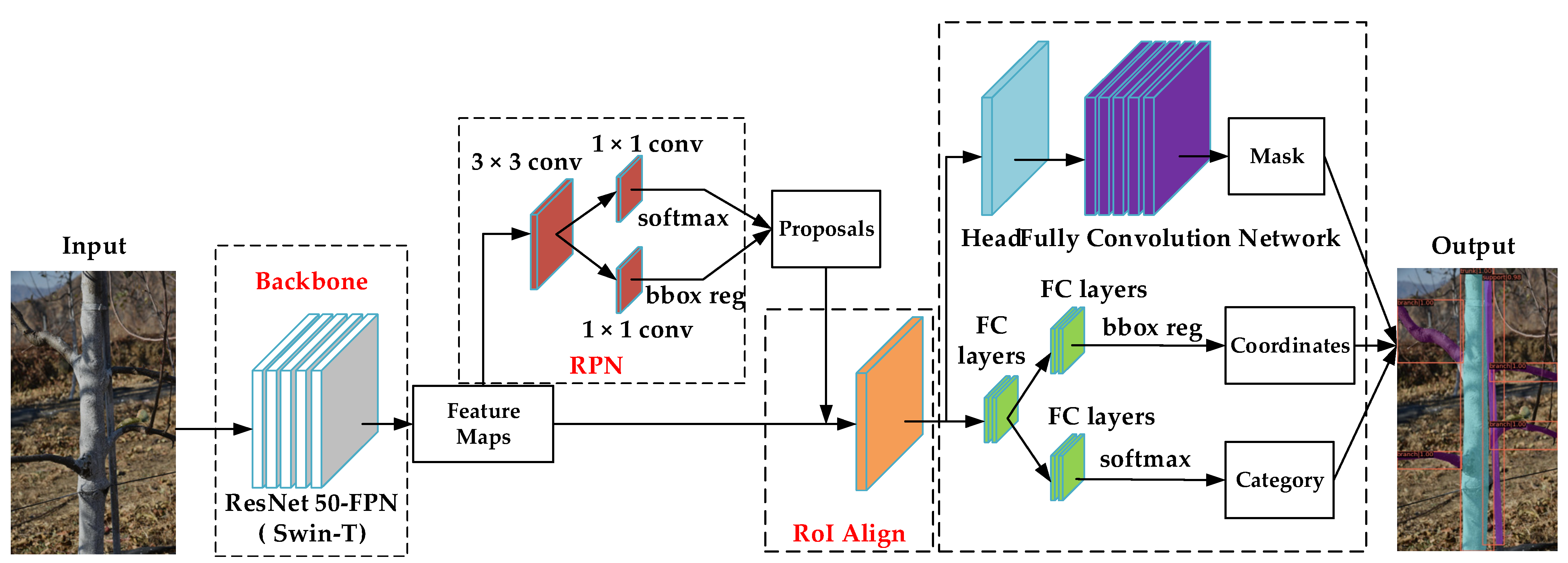
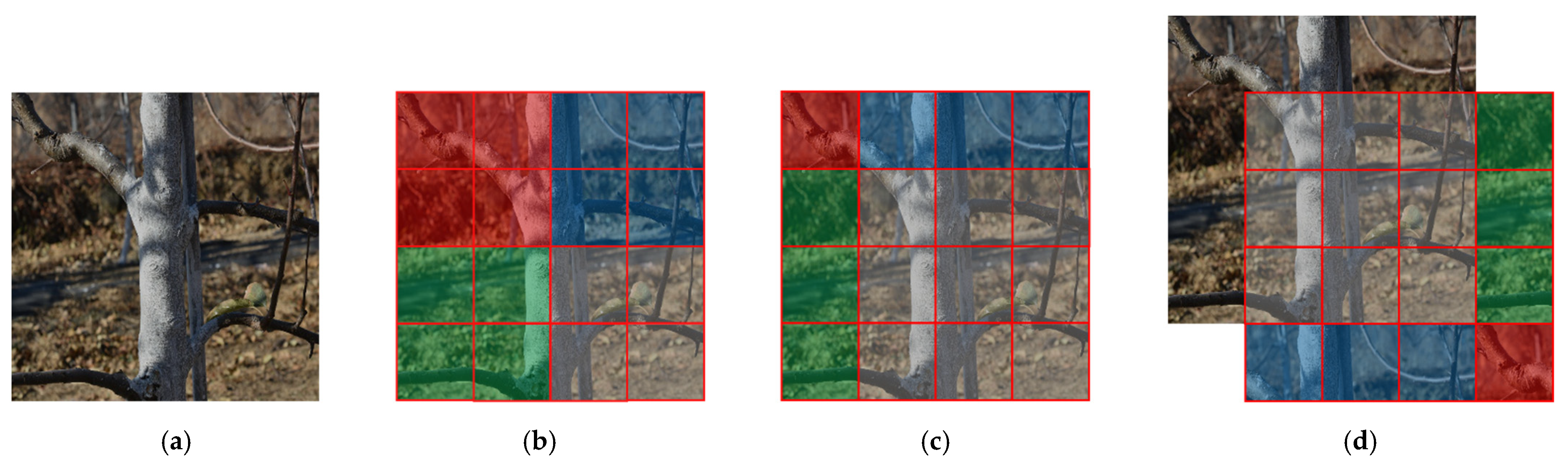
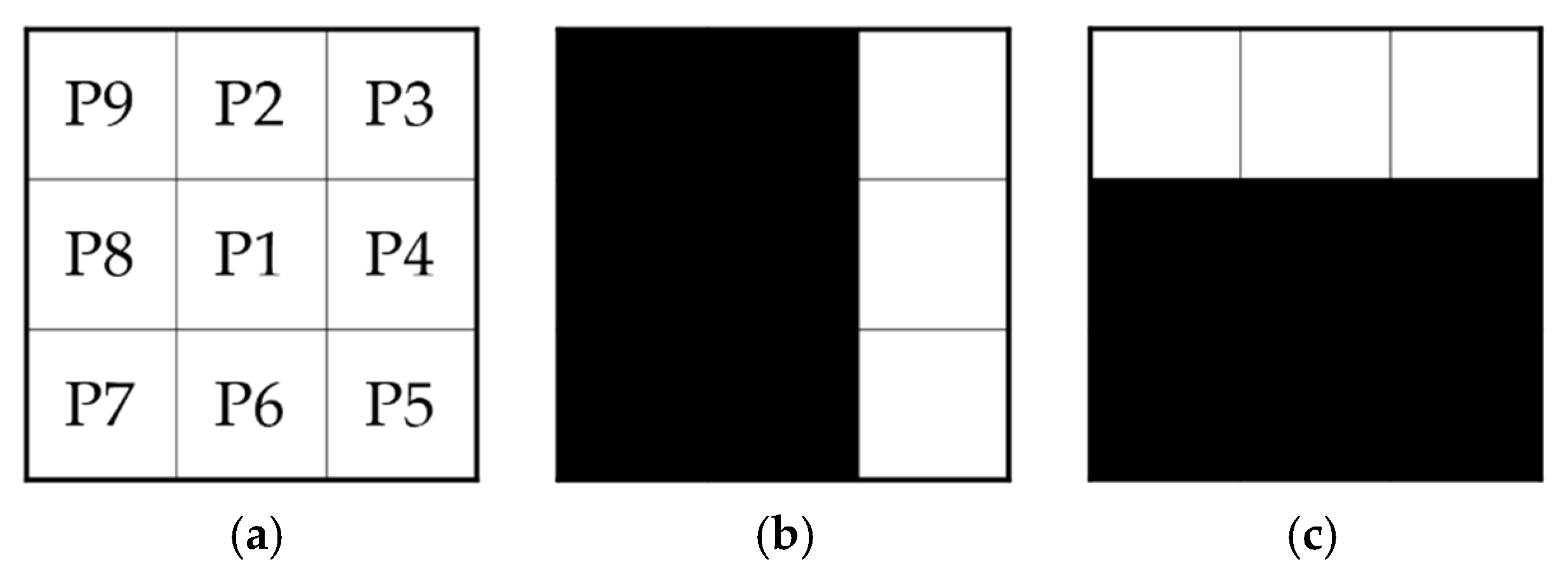
2.3. Branch Segmentation Algorithm
2.4. Parameter Settings
2.5. Evaluation Indicators
2.6. Location of Branch Junction Points
3. Results
3.1. Segmentation Results
3.2. Skeleton Extraction and Junction Point Location
4. Discussion
4.1. Segmentation Results Analysis
4.2. Skeleton Extraction and Junction Point Location Results Analysis
4.3. Comparison with Previous Studies
5. Conclusions
- (1)
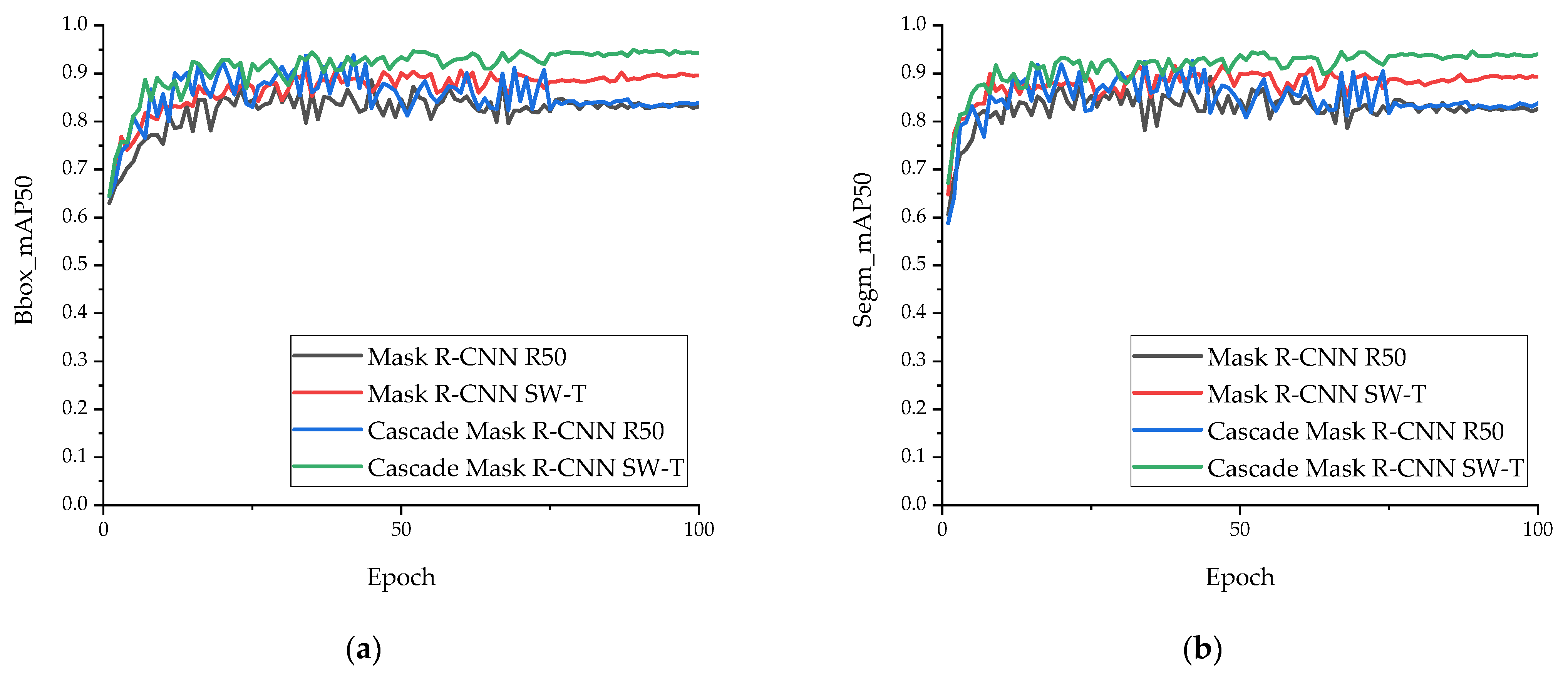
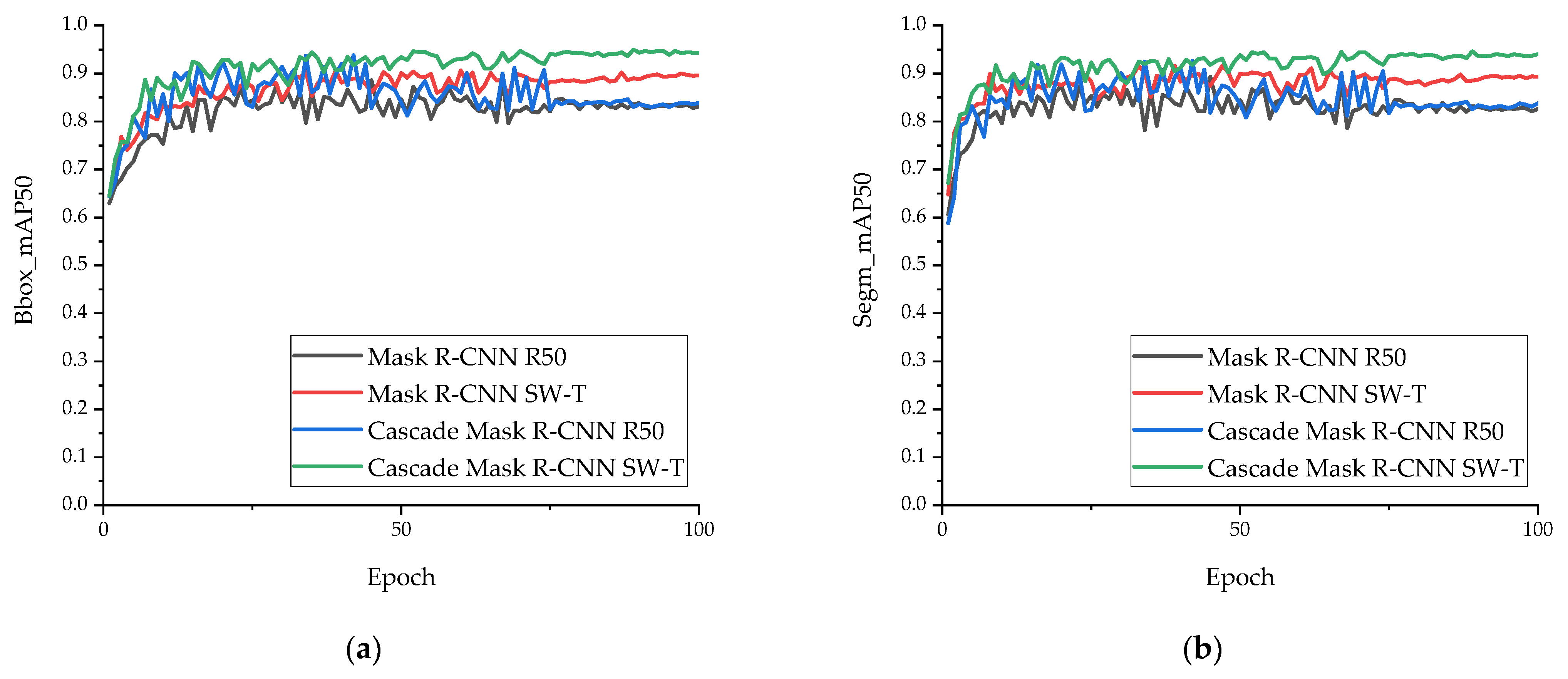
- When the IoU was 0.5, the identification effect of Cascade Mask R-CNN was better than that of Mask R-CNN, and Swin-T was better than Resnet50. At the same time, the bbox mAP and segm mAP of Cascade Mask R-CNN SW-T were the highest, which were 0.943 and 0.940, respectively.
- (2)
- In the detection and segmentation of each category, the four algorithms had a small difference in accuracy for the trunk and primary branch. In the detection of support, the accuracy of Cascade Mask R-CNN was higher than that of Mask R-CNN, and Swin-T was higher than Resnet50. Likewise, the same conclusion was obtained in the prediction results of the testing samples. Cascade Mask R-CNN SW-T was determined as the optimal algorithm. Its trunk bbox AP and segm AP were 0.986 and 0.986, primary branch were 0.965 and 0.941, and support were 0.879 and 0.893. The algorithm was more suitable for the detection of apple branches in robotic pruning. In addition, it was verified that lighting had no obvious effect on the detection effect of deep learning.
- (3)
- Compared with the direct application of Zhang & Suen, combining Cascade Mask R-CNN SW-T with Zhang & Suen to extract the apple tree skeleton had the advantage that the obtained skeleton had the trunk diameter information and its shape and junction point position were closer to actual apple trees.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kolmanič, S.; Strnad, D.; Kohek, Š.; Benes, B.; Hirst, P.; Žalik, B. An algorithm for automatic dormant tree pruning. Appl. Soft Comput. 2021, 99, 106931. [Google Scholar] [CrossRef]
- Poni, S.; Tombesi, S.; Palliotti, A.; Ughini, V.; Gatti, M. Mechanical winter pruning of grapevine: Physiological bases and applications. Sci. Hortic. 2016, 204, 88–98. [Google Scholar] [CrossRef]
- Martin-Gorriz, B.; Porras Castillo, I.; Torregrosa, A. Effect of mechanical pruning on the yield and quality of ‘fortune’ mandarins. Span. J. Agric. Res. 2014, 12, 952–959. [Google Scholar] [CrossRef]
- Zahid, A.; Mahmud, M.S.; He, L.; Heinemann, P.; Choi, D.; Schupp, J. Technological advancements towards developing a robotic pruner for apple trees: A review. Comput. Electron. Agric. 2021, 189, 106383. [Google Scholar] [CrossRef]
- Zheng, Y.; Jiang, S.; Chen, B.; Lü, H.; Wan, C.; Kang, F. Review on technology and equipment of mechanization in hilly orchard. Trans. Chin. Soc. Agric. 2020, 51, 1–20. [Google Scholar]
- Lehnert, R. Robotic Pruning. Good Fruit Grower. 1 November 2012. Available online: https://www.goodfruit.com/robotic-pruning (accessed on 15 March 2022).
- He, L.; Schupp, J. Sensing and automation in pruning of apple trees: A review. Agronomy 2018, 8, 211. [Google Scholar] [CrossRef]
- Ji, W.; Qian, Z.; Xu, B.; Tao, Y.; Zhao, D.; Ding, S. Apple tree branch segmentation from images with small gray-level difference for agricultural harvesting robot. Optik 2016, 127, 11173–11182. [Google Scholar] [CrossRef]
- Botterill, T.; Paulin, S.; Green, R.; Williams, S.; Lin, J.; Saxton, V.; Mills, S.; Chen, X.; Corbett-Davies, S. A Robot System for Pruning Grape Vines. J. Field Rob. 2017, 34, 1100–1122. [Google Scholar] [CrossRef]
- Tabb, A.; Medeiros, H. Automatic segmentation of trees in dynamic outdoor environments. Comput. Ind. 2018, 98, 90–99. [Google Scholar] [CrossRef]
- Karkee, M.; Adhikari, B.; Amatya, S.; Zhang, Q. Identification of pruning branches in tall spindle apple trees for automated pruning. Comput. Electron. Agric. 2014, 103, 127–135. [Google Scholar] [CrossRef]
- Medeiros, H.; Kim, D.; Sun, J.; Seshadri, H.; Akbar, S.A.; Elfiky, N.M.; Park, J. Modeling dormant fruit trees for agricultural automation. J. Field Rob. 2017, 34, 1203–1224. [Google Scholar] [CrossRef]
- Mack, J.; Lenz, C.; Teutrine, J.; Steinhage, V. High-precision 3D detection and reconstruction of grapes from laser range data for efficient phenotyping based on supervised learning. Comput. Electron. Agric. 2017, 135, 300–311. [Google Scholar] [CrossRef]
- Zhang, J.; He, L.; Karkee, M.; Zhang, Q.; Zhang, X.; Gao, Z. Branch detection for apple trees trained in fruiting wall architecture using depth features and Regions-Convolutional Neural Network (R-CNN). Comput. Electron. Agric. 2018, 155, 386–393. [Google Scholar] [CrossRef]
- Zhang, J.; Karkee, M.; Zhang, Q.; Zhang, X.; Yaqoob, M.; Fu, L.; Wang, S. Multi-class object detection using faster R-CNN and estimation of shaking locations for automated shake-and-catch apple harvesting. Comput. Electron. Agric. 2020, 173, 105384. [Google Scholar] [CrossRef]
- Zhang, X.; Karkee, M.; Zhang, Q.; Whiting, M.D. Computer vision-based tree trunk and branch identification and shaking points detection in Dense-Foliage canopy for automated harvesting of apples. J. Field Rob. 2020, 38, 476–493. [Google Scholar] [CrossRef]
- Majeed, Y.; Zhang, J.; Zhang, X.; Fu, L.; Karkee, M.; Zhang, Q.; Whiting, M.D. Deep learning based segmentation for automated training of apple trees on trellis wires. Comput. Electron. Agric. 2020, 170, 105277. [Google Scholar] [CrossRef]
- Majeed, Y.; Karkee, M.; Zhang, Q.; Fu, L.; Whiting, M.D. Determining grapevine cordon shape for automated green shoot thinning using semantic segmentation-based deep learning networks. Comput. Electron. Agric. 2020, 171, 105308. [Google Scholar] [CrossRef]
- Majeed, Y.; Karkee, M.; Zhang, Q. Estimating the trajectories of vine cordons in full foliage canopies for automated green shoot thinning in vineyards. Comput. Electron. Agric. 2020, 176, 105671. [Google Scholar] [CrossRef]
- Chen, Z.; Ting, D.; Newbury, R.; Chen, C. Semantic segmentation for partially occluded apple trees based on deep learning. Comput. Electron. Agric. 2021, 181, 105952. [Google Scholar] [CrossRef]
- Yang, C.; Xiong, L.; Wang, Z.; Wang, Y.; Shi, G.; Kuremot, T.; Zhao, W.; Yang, Y. Integrated detection of citrus fruits and branches using a convolutional neural network. Comput. Electron. Agric. 2020, 174, 105469. [Google Scholar] [CrossRef]
- Cuevas-Velasquez, H.; Gallego, A.; Fisher, R. Segmentation and 3d reconstruction of rose plants from stereoscopic images. Comput. Electron. Agric. 2020, 171, 105296. [Google Scholar] [CrossRef] [Green Version]
- Liang, C.; Xiong, J.; Zheng, Z.; Zhong, Z.; Li, Z.; Chen, S.; Yang, Z. A visual detection method for nighttime litchi fruits and fruiting stems. Comput. Electron. Agric. 2020, 169, 105192. [Google Scholar] [CrossRef]
- Ma, B.; Du, J.; Wang, L.; Jiang, H.; Zhou, M. Automatic branch detection of jujube trees based on 3D reconstruction for dormant pruning using the deep learning-based method. Comput. Electron. Agric. 2021, 190, 106484. [Google Scholar] [CrossRef]
- You, A.; Grimm, C.; Silwal, A.; Davidson, J.R. Semantics-guided skeletonization of upright fruiting offshoot trees for robotic pruning. Comput. Electron. Agric. 2022, 192, 106622. [Google Scholar] [CrossRef]
- Cai, Z.; Vasconcelos, N. Cascade R-CNN: High quality object detection and instance segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2021, 43, 1483–1498. [Google Scholar] [CrossRef]
- Dosovitskiy, A.; Beyer, L.; Kolesnikov, A.; Weissenborn, D.; Houlsby, N. An image is worth 16x16 words: Transformers for image recognition at scale. arXiv 2021, arXiv:2010.11929v2. [Google Scholar]
- Liu, Z.; Lin, Y.; Cao, Y.; Hu, H.; Wei, Y.; Zhang, Z.; Lin, S.; Guo, B. Swin transformer: Hierarchical vision transformer using shifted windows. arXiv 2021, arXiv:2103.14030. [Google Scholar]
- Zheng, H.; Wang, G.; Li, X. Swin-MLP: A strawberry appearance quality identification method by Swin Transformer and multi-layer perceptron. J. Food Meas. Charact. 2022, 16, 2789–2800. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, Z.; Luo, L.; Zhu, W.; Chen, J.; Wang, W. SwinGD: A Robust Grape Bunch Detection Model Based on Swin Transformer in Complex Vineyard Environment. Horticulturae 2021, 7, 492. [Google Scholar] [CrossRef]
- Yuan, W.; Xu, W. MSST-Net: A Multi-Scale Adaptive Network for Building Extraction from Remote Sensing Images Based on Swin Transformer. Remote Sens. 2021, 13, 4743. [Google Scholar] [CrossRef]
- Xu, X.; Feng, Z.; Cao, C.; Li, M.; Wu, J.; Wu, Z.; Shang, Y.; Ye, S. An Improved Swin Transformer-Based Model for Remote Sensing Object Detection and Instance Segmentation. Remote Sens. 2021, 13, 4779. [Google Scholar] [CrossRef]
- Wang, Z.; Zhao, J.; Zhang, R.; Li, Z.; Lin, Q.; Wang, X. UATNet: U-Shape Attention-Based Transformer Net for Meteorological Satellite Cloud Recognition. Remote Sens. 2022, 14, 104. [Google Scholar] [CrossRef]
- Xiao, X.; Guo, W.; Chen, R.; Hui, Y.; Wang, J.; Zhao, H. A Swin Transformer-Based Encoding Booster Integrated in U-Shaped Network for Building Extraction. Remote Sens. 2022, 14, 2611. [Google Scholar] [CrossRef]
- Xu, Z.; Zhang, W.; Zhang, T.; Yang, Z.; Li, J. Efficient Transformer for Remote Sensing Image Segmentation. Remote Sens. 2021, 13, 3585. [Google Scholar] [CrossRef]
- Xia, R.; Chen, J.; Huang, Z.; Wan, H.; Wu, B.; Sun, L.; Yao, B.; Xiang, H.; Xing, M. CRTransSar: A Visual Transformer Based on Contextual Joint Representation Learning for SAR Ship Detection. Remote Sens. 2022, 14, 1488. [Google Scholar] [CrossRef]
- Liu, P.; Song, Y.; Chai, M.; Han, Z.; Zhang, Y. Swin–UNet++: A Nested Swin Transformer Architecture for Location Identification and Morphology Segmentation of Dimples on 2.25Cr1Mo0.25V Fractured Surface. Materials 2021, 14, 7504. [Google Scholar] [CrossRef]
- Gao, L.; Zhang, J.; Yang, C.; Zhou, Y. Cas-VSwin transformer: A variant swin transformer for surface-defect detection. Comput. Ind. 2022, 140, 103689. [Google Scholar] [CrossRef]
- Liao, Z.; Fan, N.; Xu, K. Swin Transformer Assisted PriorAttention Network for Medical Image Segmentation. Appl. Sci. 2022, 12, 4735. [Google Scholar] [CrossRef]
- Jiang, Y.; Zhang, Y.; Lin, X.; Dong, J.; Cheng, T.; Liang, J. SwinBTS: A Method for 3D Multimodal Brain Tumor Segmentation Using Swin Transformer. Brain Sci. 2022, 12, 797. [Google Scholar] [CrossRef]
- Schupp, J.; Winzeler, H.; Kon, T.; Marini, R.; Baugher, T.; Kime, L.; Schupp, M. A method for quantifying whole-tree pruning severity in mature tall spindle apple plantings. HortScience Horts. 2017, 52, 1233–1240. [Google Scholar] [CrossRef]
- He, K.; Gkioxari, G.; Dollár, P.; Girshick, R. Mask R-CNN. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 42, 386–397. [Google Scholar] [CrossRef] [PubMed]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Identity mappings in deep residual networks. In Proceedings of the European Conference on Computer Vision (ECCV ′16), Amsterdam, The Netherlands, 11–14 October 2016; pp. 630–645. [Google Scholar] [CrossRef]
- Vaswani, A.; Shazeer, N.; Parmar, N.; Uszkoreit, J.; Jones, L.; Gomez, A.; Kaiser, Ł.; Polosukhin, I. Attention is all you need. In Proceedings of the Advances in Neural Information Processing Systems, Long Beach, CA, USA, 12 June 2017; pp. 5998–6008. [Google Scholar]
- Zhang, T.; Suen, C. A fast parallel algorithm for thinning digital patterns. Commun. ACM 1984, 27, 236–239. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Backbone | Optimizer | Initial Learning Rate | Weight Decay |
|---|---|---|---|---|
| Mask R-CNN | Resnet50 | SGD | 0.02 | 0.0001 |
| Swin-T | AdamW | 0.0001 | 0.05 | |
| Cascade Mask R-CNN | Resnet50 | SGD | 0.02 | 0.0001 |
| Swin-T | AdamW | 0.0001 | 0.05 |
| Model | Backbone | Bbox mAP | Segm mAP | ||||
|---|---|---|---|---|---|---|---|
| IoU0.5 | IoU0.75 | IoU0.5:0.95 | IoU0.5 | IoU0.75 | IoU0.5:0.95 | ||
| Mask R-CNN | Resnet50 | 0.831 | 0.822 | 0.787 | 0.826 | 0.777 | 0.646 |
| Swin-T | 0.896 | 0.791 | 0.654 | 0.893 | 0.776 | 0.659 | |
| Cascade Mask R-CNN | Resnet50 | 0.846 | 0.846 | 0.838 | 0.841 | 0.804 | 0.673 |
| Swin-T | 0.943 | 0.900 | 0.781 | 0.940 | 0.845 | 0.709 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tong, S.; Yue, Y.; Li, W.; Wang, Y.; Kang, F.; Feng, C. Branch Identification and Junction Points Location for Apple Trees Based on Deep Learning. Remote Sens. 2022, 14, 4495. https://doi.org/10.3390/rs14184495
Tong S, Yue Y, Li W, Wang Y, Kang F, Feng C. Branch Identification and Junction Points Location for Apple Trees Based on Deep Learning. Remote Sensing. 2022; 14(18):4495. https://doi.org/10.3390/rs14184495
Chicago/Turabian StyleTong, Siyuan, Yang Yue, Wenbin Li, Yaxiong Wang, Feng Kang, and Chao Feng. 2022. "Branch Identification and Junction Points Location for Apple Trees Based on Deep Learning" Remote Sensing 14, no. 18: 4495. https://doi.org/10.3390/rs14184495
APA StyleTong, S., Yue, Y., Li, W., Wang, Y., Kang, F., & Feng, C. (2022). Branch Identification and Junction Points Location for Apple Trees Based on Deep Learning. Remote Sensing, 14(18), 4495. https://doi.org/10.3390/rs14184495