

Multi-Platform LiDAR for Non-Destructive Individual Aboveground Biomass Estimation for Changbai Larch (Larix olgensis Henry) Using a Hierarchical Bayesian Approach



Abstract
:1. Introduction
2. Materials and Methods
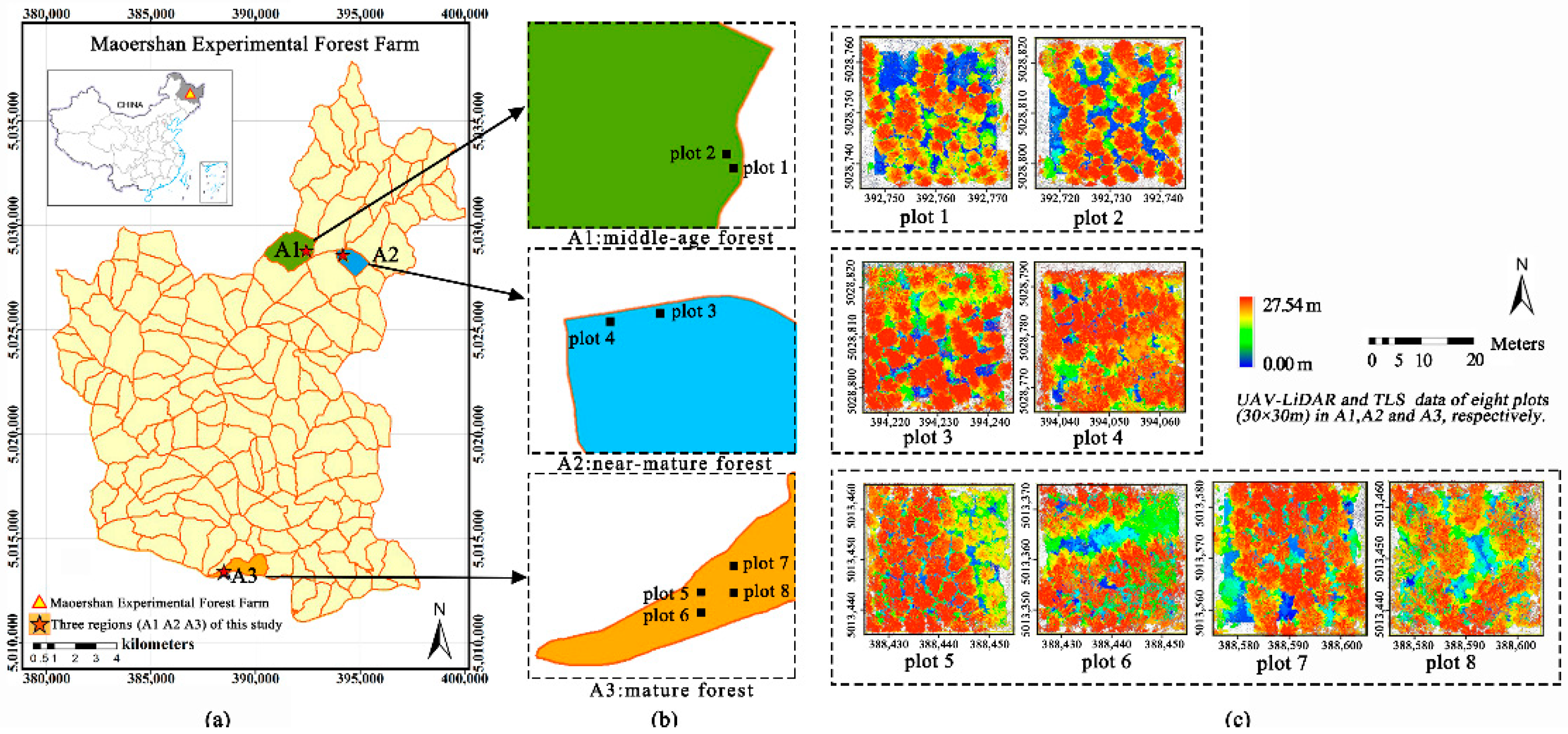
2.1. Study Area and Sampling
2.2. Data and Preprocessing
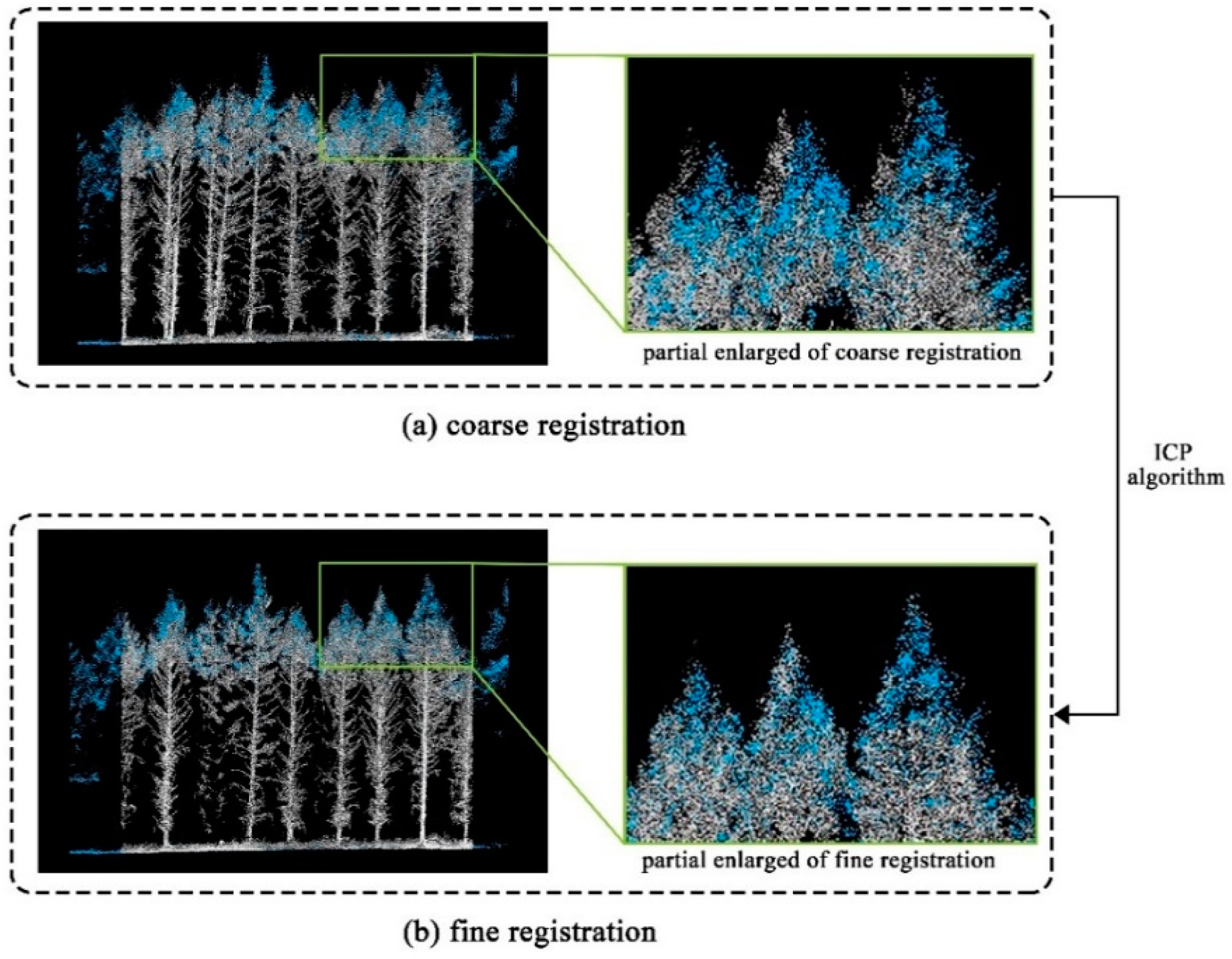
2.2.1. LiDAR Data and Preprocessing
2.2.2. Field Inventory Data
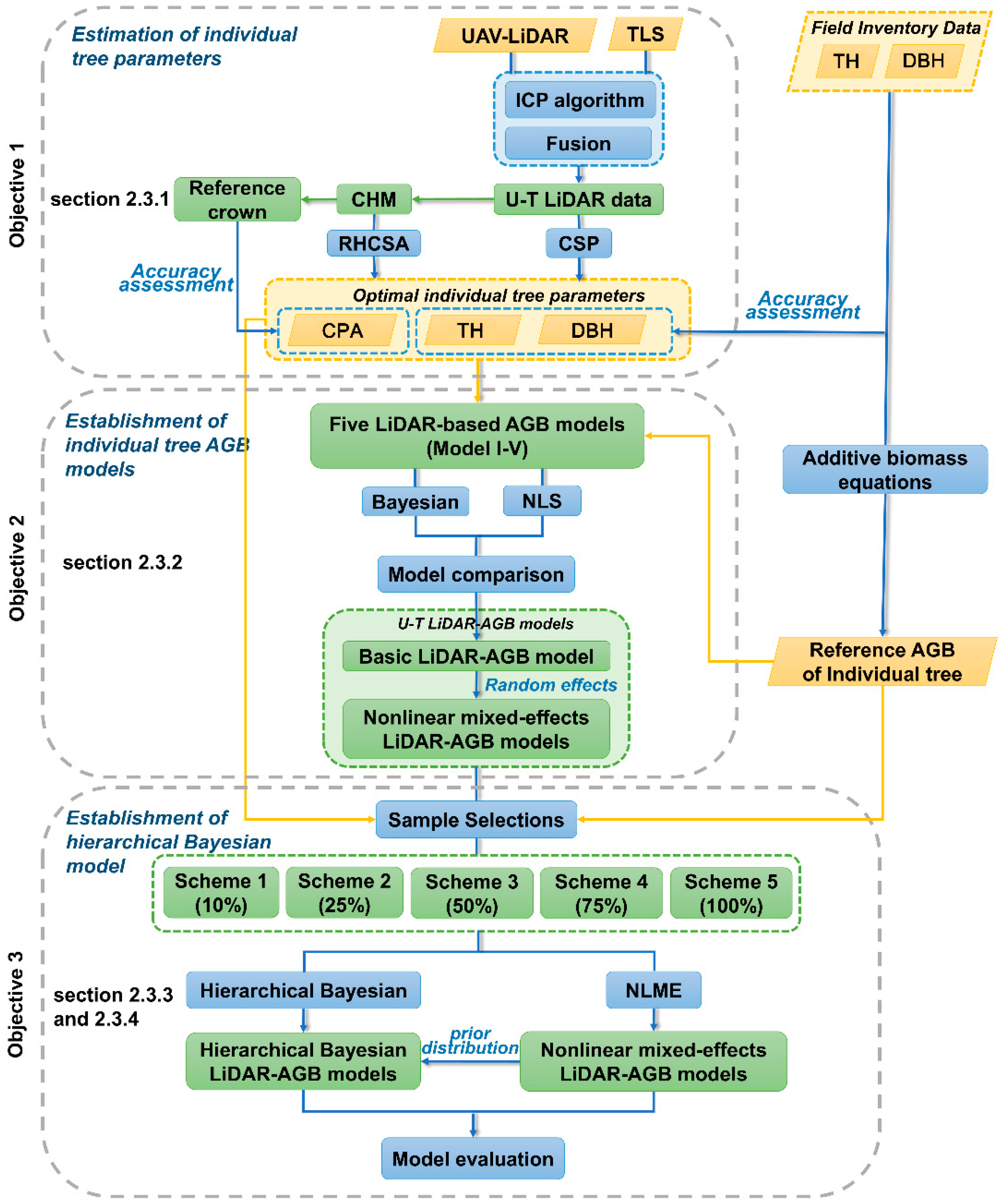
2.3. Methods
2.3.1. Estimation of Individual Tree Parameters
2.3.2. Establishment of Individual-Tree AGB Model Based on U-T LiDAR
2.3.3. Establishment of Hierarchical Bayesian Model
2.3.4. Model Evaluation
3. Results
3.1. Estimation of Individual Tree Parameters
3.2. Establishment of Individual-Tree AGB Model Based on U-T LiDAR
3.3. Establishment of Hierarchical Bayesian Models with Different Sample Sizes
4. Discussion
4.1. Individual Tree Parameters Estimation Using U-T LiDAR Data
4.2. The Hierarchical Bayesian Method in AGB Estimation
4.3. Limitations
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | UAV-LiDAR | TLS |
|---|---|---|
| Sensor | RIEGL mini VUX-1UAV | RIEGL VZ-400i |
| Wavelength (nm) | 905 | 1550 |
| Point frequency (Hz) | 100 k | 1200 k |
| Ranging accuracy (mm) | ±10 | ±5 |
| Scan frequency (Hz) | 10–100 | 100–1200 k |
| Field of view (°) | 360 | 360 × 100 |
| Average point density (pts/m2) | 111 | 275,606 |
| Component | Models |
|---|---|
| Stem | |
| Branch | |
| Foliage | |
| AGB |
| Parameter Combinations | AIC | BIC | LL |
|---|---|---|---|
| 3032.088 | 3054.828 | −1510.044 | |
| 3031.211 | 3053.950 | −1509.606 | |
| 3031.709 | 3054.449 | −1509.854 | |
| 3029.853 | 3052.593 | −1508.927 | |
| 3035.211 | 3065.531 | −1509.606 | |
| 3036.087 | 3066.406 | −1510.043 | |
| 3032.164 | 3062.483 | −1508.082 | |
| 3033.269 | 3063.588 | −1508.634 | |
| 3031.936 | 3062.256 | −1507.968 | |
| 3031.729 | 3062.048 | −1507.864 | |
| - | - | - | |
| 3038.164 | 3079.854 | −1508.082 | |
| - | - | - | |
| - | - | - | |
| - | - | - |
| Sample Sizes (Proportions) | Variables | Mean | Standard Deviation | Minimum | Maximum |
|---|---|---|---|---|---|
| 327 (100%) | (cm) | 24.69 | 6.81 | 10.00 | 42.30 |
| (m) | 21.86 | 3.09 | 11.27 | 27.54 | |
| (m2) | 14.81 | 8.67 | 0.94 | 58.44 | |
| AGB (kg) | 301.03 | 174.91 | 24.11 | 951.38 | |
| 246 (75%) | (cm) | 24.84 | 6.78 | 10.20 | 42.30 |
| (m) | 21.96 | 2.96 | 13.29 | 27.54 | |
| (m2) | 15.24 | 9.10 | 0.94 | 58.44 | |
| AGB (kg) | 305.13 | 177.56 | 31.56 | 951.38 | |
| 164 (50%) | (cm) | 24.34 | 6.77 | 10.00 | 42.30 |
| (m) | 21.87 | 3.19 | 11.64 | 27.54 | |
| (m2) | 14.82 | 7.79 | 0.94 | 37.00 | |
| AGB (kg) | 293.77 | 177.97 | 38.08 | 951.38 | |
| 82 (25%) | (cm) | 25.00 | 7.79 | 10.10 | 42.30 |
| (m) | 21.97 | 3.15 | 11.27 | 27.54 | |
| (m2) | 15.44 | 9.63 | 1.06 | 53.00 | |
| AGB (kg) | 322.26 | 208.51 | 24.11 | 951.38 | |
| 34 (10%) | (cm) | 24.27 | 7.17 | 10.70 | 40.20 |
| (m) | 21.69 | 2.73 | 16.53 | 26.30 | |
| (m2) | 15.73 | 11.29 | 1.06 | 53.00 | |
| AGB (kg) | 287.51 | 188.48 | 41.47 | 833.04 |
References
- Chen, D.; Huang, X.; Zhang, S.; Sun, X. Biomass Modeling of Larch (Larix spp.) Plantations in China Based on the Mixed Model, Dummy Variable Model, and Bayesian Hierarchical Model. Forests 2017, 8, 268. [Google Scholar] [CrossRef]
- Gleason, C.J.; Im, J. A Review of Remote Sensing of Forest Biomass and Biofuel: Options for Small-Area Applications. GISci. Remote Sens. 2011, 48, 141–170. [Google Scholar] [CrossRef]
- Pan, Y.; Birdsey, R.A.; Fang, J.; Houghton, R.; Kauppi, P.E.; Kurz, W.A.; Phillips, O.L.; Shvidenko, A.; Lewis, S.L.; Canadell, J.G.; et al. A Large and Persistent Carbon Sink in the World’s Forests. Science 2011, 333, 988–993. [Google Scholar] [CrossRef] [PubMed]
- Zhang, X.; Duan, A.; Zhang, J.; Muldoon, M.R. Tree biomass estimation of Chinese fir (Cunninghamia lanceolata) based on Bayesian method. PLoS ONE 2013, 8, e79868. [Google Scholar] [CrossRef]
- Xu, Q.; Man, A.; Fredrickson, M.; Hou, Z.; Pitkänen, J.; Wing, B.; Ramirez, C.; Li, B.; Greenberg, J.A. Quantification of uncertainty in aboveground biomass estimates derived from small-footprint airborne LiDAR. Remote Sens. Environ. 2018, 216, 514–528. [Google Scholar] [CrossRef]
- Liang, X.; Hyyppä, J.; Kaartinen, H.; Lehtomäki, M.; Pyörälä, J.; Pfeifer, N.; Holopainen, M.; Brolly, G.; Francesco, P.; Hackenberg, J.; et al. International benchmarking of terrestrial laser scanning approaches for forest inventories. ISPRS J. Photogramm. 2018, 144, 137–179. [Google Scholar] [CrossRef]
- Parresol, B.R. Assessing tree and stand biomass: A review with examples and critical comparisons. For. Sci. 1999, 4, 573–593. [Google Scholar]
- Fu, L.; Lei, Y.; Wang, G.; Bi, H.; Tang, S.; Song, X. Comparison of seemingly unrelated regressions with error-in-variable models for developing a system of nonlinear additive biomass equations. Trees 2016, 30, 839–857. [Google Scholar] [CrossRef]
- Fu, L.; Zeng, W.; Tang, S. Individual Tree Biomass Models to Estimate Forest Biomass for Large Spatial Regions Developed Using Four Pine Species in China. For. Sci. 2017, 63, 241–249. [Google Scholar] [CrossRef]
- Zianis, D.; Mencuccini, M. On simplifying allometric analyses of forest biomass. For. Ecol. Manag. 2004, 187, 311–332. [Google Scholar] [CrossRef]
- Kato, A.; Moskal, L.M.; Schiess, P.; Swanson, M.E.; Calhoun, D.; Stuetzle, W. Capturing tree crown formation through implicit surface reconstruction using airborne lidar data. Remote Sens. Environ. 2009, 113, 1148–1162. [Google Scholar] [CrossRef]
- Zhao, D.; Kane, M.; Markewitz, D.; Teskey, R.; Clutter, M. Additive Tree Biomass Equations for Midrotation Loblolly Pine Plantations. For. Sci. 2015, 61, 613–623. [Google Scholar] [CrossRef]
- Zheng, Y.; Jia, W.; Wang, Q.; Huang, X. Deriving Individual-Tree Biomass from Effective Crown Data Generated by Ter-restrial Laser Scanning. Remote Sens. 2019, 11, 2793. [Google Scholar] [CrossRef]
- Nakajima, T.; Hirata, Y.; Hiroshima, T.; Furuya, N.; Tatsuhara, S.; Tsuyuki, S.; Shiraishi, N. A Growth Prediction System for Local Stand Volume Derived from LIDAR Data. GISci. Remote Sens. 2011, 48, 394–415. [Google Scholar] [CrossRef]
- Zhao, Y.; Hao, Y.; Zhen, Z.; Quan, Y. A Region-Based Hierarchical Cross-Section Analysis for Individual Tree Crown De-lineation Using ALS Data. Remote Sens. 2017, 9, 1084. [Google Scholar] [CrossRef]
- Zhen, Z.; Quackenbush, L.J.; Stehman, S.V.; Zhang, L. Agent-based region growing for individual tree crown delineation from airborne laser scanning (ALS) data. Int. J. Remote Sens. 2015, 36, 1965–1993. [Google Scholar] [CrossRef]
- Du, C.; Fan, W.; Ma, Y.; Jin, H.; Zhen, Z. The Effect of Synergistic Approaches of Features and Ensemble Learning Algorith on Aboveground Biomass Estimation of Natural Secondary Forests Based on ALS and Landsat 8. Sensors 2021, 21, 5974. [Google Scholar] [CrossRef]
- Popescu, S.C. Estimating biomass of individual pine trees using airborne lidar. Biomass Bioenergy 2007, 31, 646–655. [Google Scholar] [CrossRef]
- Cao, L.; Coops, N.C.; Innes, J.L.; Sheppard, S.R.J.; Fu, L.; Ruan, H.; She, G. Estimation of forest biomass dynamics in sub-tropical forests using multi-temporal airborne LiDAR data. Remote Sens. Environ. 2016, 178, 158–171. [Google Scholar] [CrossRef]
- Riggins, J.J.; Tullis, J.A.; Stephen, F.M. Per-segment Aboveground Forest Biomass Estimation Using LIDAR-Derived Height Percentile Statistics. GISci. Remote Sens. 2009, 46, 232–248. [Google Scholar] [CrossRef]
- Fu, L.; Liu, Q.; Sun, H.; Wang, Q.; Li, Z.; Chen, E.; Pang, Y.; Song, X.; Wang, G. Development of a System of Compatible Individual Tree Diameter and Aboveground Biomass Prediction Models Using Error-In-Variable Regression and Airborne LiDAR Data. Remote Sens. 2018, 10, 325. [Google Scholar] [CrossRef] [Green Version]
- Jucker, T.; Fischer, F.J.; Chave, J.; Coomes, D.A.; Caspersen, J.; Ali, A.; Loubota Panzou, G.J.; Feldpausch, T.R.; Falster, D.; Usoltsev, V.A.; et al. Tallo: A global tree allometry and crown architecture database. Glob. Chang. Biol. 2022, 28, 5254–5268. [Google Scholar] [CrossRef] [PubMed]
- Paris, C.; Valduga, D.; Bruzzone, L. A Hierarchical Approach to Three-Dimensional Segmentation of LiDAR Data at Sin-gle-Tree Level in a Multilayered Forest. IEEE Trans. Geosci. Remote Sens. 2016, 54, 4190–4203. [Google Scholar] [CrossRef]
- Montealegre-Gracia, A.L.; Lamelas-Gracia, M.T.; García-Martín, A.; de la Riva-Fernández, J.; Escribano-Bernal, F. Using low-density discrete Airborne Laser Scanning data to assess the potential carbon dioxide emission in case of a fire event in a Mediterranean pine forest. GISci. Remote Sens. 2017, 54, 721–740. [Google Scholar] [CrossRef]
- Hilker, T.; Coops, N.C.; Newnham, G.J.; van Leeuwen, M.; Wulder, M.A.; Stewart, J.; Culvenor, D.S. Comparison of Ter-restrial and Airborne LiDAR in Describing Stand Structure of a Thinned Lodgepole Pine Forest. J. For. 2012, 110, 97–104. [Google Scholar] [CrossRef]
- Guan, H.; Su, Y.; Hu, T.; Wang, R.; Ma, Q.; Yang, Q.; Sun, X.; Li, Y.; Jin, S.; Zhang, J.; et al. A Novel Framework to Auto-matically Fuse Multiplatform LiDAR Data in Forest Environments Based on Tree Locations. IEEE Trans. Geosci. Remote Sens. 2020, 58, 2165–2177. [Google Scholar] [CrossRef]
- Zhen, Z.; Yang, L.; Ma, Y.; Wei, Q.; Jin, H.I.; Zhao, Y. Upscaling aboveground biomass of larch (Larix olgensis Henry) plantations from field to satellite measurements: A comparison of individual tree-based and area-based approaches. GISci. Remote Sens. 2022, 59, 722–743. [Google Scholar] [CrossRef]
- Mustonen, J.; Packalén, P.; Kangas, A. Automatic segmentation of forest stands using a canopy height model and aerial photography. Scand. J. For. Res. 2008, 23, 534–545. [Google Scholar] [CrossRef]
- Jing, L.; Hu, B.; Li, J.; Noland, T. Automated Delineation of Individual Tree Crowns from Lidar Data by Multi-Scale Analysis and Segmentation. Photogramm. Eng. Remote Sens. 2014, 78, 1275–1284. [Google Scholar]
- Li, W.; Guo, Q.; Jakubowski, M.K.; Kelly, M. A New Method for Segmenting Individual Trees from the Lidar Point Cloud. Photogramm. Eng. Remote Sens. 2012, 78, 75–84. [Google Scholar]
- Ene, L.; Næsset, E.; Gobakken, T. Single tree detection in heterogeneous boreal forests using airborne laser scanning and area-based stem number estimates. Int. J. Remote Sens. 2012, 33, 5171–5193. [Google Scholar] [CrossRef]
- Hamraz, H.; Contreras, M.A.; Zhang, J. Vertical stratification of forest canopy for segmentation of understory trees within small-footprint airborne LiDAR point clouds. ISPRS J. Photogramm. 2017, 130, 385–392. [Google Scholar] [CrossRef]
- Lei, C.; Ju, C.; Cai, T.; Jing, X.; Wei, X.; Di, X. Estimating canopy closure density and above-ground tree biomass using partial least square methods in Chinese boreal forests. J. For. Res. 2012, 23, 191–196. [Google Scholar] [CrossRef]
- Tao, S.; Wu, F.; Guo, Q.; Wang, Y.; Li, W.; Xue, B.; Hu, X.; Li, P.; Tian, D.; Li, C.; et al. Segmenting tree crowns from ter-restrial and mobile LiDAR data by exploring ecological theories. ISPRS J. Photogramm. 2015, 110, 66–76. [Google Scholar] [CrossRef]
- Zhen, Z.; Quackenbush, L.; Zhang, L. Trends in Automatic Individual Tree Crown Detection and Delineation—Evolution of LiDAR Data. Remote Sens. 2016, 8, 333. [Google Scholar] [CrossRef]
- Lee, S.J.; Kim, J.R.; Choi, Y.S. The extraction of forest CO2 storage capacity using high-resolution airborne lidar data. GIScience Remote Sens. 2013, 2, 154–171. [Google Scholar] [CrossRef]
- Návar, J. Allometric equations for tree species and carbon stocks for forests of northwestern Mexico. For. Ecol. Manag. 2009, 257, 427–434. [Google Scholar] [CrossRef]
- Liu, X.; Hao, Y.; Widagdo, F.R.A.; Xie, L.; Dong, L.; Li, F. Predicting Height to Crown Base of Larix olgensis in Northeast China Using UAV-LiDAR Data and Nonlinear Mixed Effects Models. Remote Sens. 2021, 13, 1834. [Google Scholar] [CrossRef]
- Melbourne, B.A.; Hastings, A. Extinction risk depends strongly on factors contributing to stochasticity. Nature 2008, 454, 100–103. [Google Scholar] [CrossRef]
- Zhang, Y.; Borders, B.E. Using a system mixed-effects modeling method to estimate tree compartment biomass for inten-sively managed loblolly pines—An allometric approach. For. Ecol. Manag. 2004, 194, 145–157. [Google Scholar] [CrossRef]
- Li, R.; Stewart, B.; Weiskittel, A. A Bayesian approach for modelling non-linear longitudinal/hierarchical data with random effects in forestry. Forestry 2012, 85, 17–25. [Google Scholar] [CrossRef]
- De la Cruz-Mesía, R.; Marshall, G. Non-linear random effects models with continuous time autoregressive errors: A Bayesian approach. Stat. Med. 2006, 25, 1471–1484. [Google Scholar] [CrossRef] [PubMed]
- Chen, D.; Huang, X.; Sun, X.; Ma, W.; Zhang, S. A Comparison of Hierarchical and Non-Hierarchical Bayesian Approaches for Fitting Allometric Larch (Larix. spp.) Biomass Equations. Forests 2016, 7, 18. [Google Scholar] [CrossRef] [Green Version]
- Zapata-Cuartas, M.; Sierra, C.A.; Alleman, L. Probability distribution of allometric coefficients and Bayesian estimation of aboveground tree biomass. For. Ecol. Manag. 2012, 277, 173–179. [Google Scholar] [CrossRef]
- Wu, W.; Bethel, M.; Mishra, D.R.; Hardy, T. Model selection in Bayesian framework to identify the best WorldView-2 based vegetation index in predicting green biomass of salt marshes in the northern Gulf of Mexico. GISci. Remote Sens. 2018, 55, 880–904. [Google Scholar] [CrossRef]
- Lin, W.; Lu, Y.; Li, G.; Jiang, X.; Lu, D. A comparative analysis of modeling approaches and canopy height-based data sources for mapping forest growing stock volume in a northern subtropical ecosystem of China. GISci. Remote Sens. 2022, 59, 568–589. [Google Scholar] [CrossRef]
- Spiegelhalter, D.J.; Best, N.G.; Carlin, B.P.; Van Der Linde, A. Bayesian measures of model complexity and fit. J. R. Stat. Soc. Ser. B Stat. Methodol. 2002, 64, 583–639. [Google Scholar] [CrossRef]
- Gilks, W.R.; Thomas, A.; Spiegelhalter, D.J. A Language and Program for Complex Bayesian Modelling. Statistician 1994, 43, 169–177. [Google Scholar] [CrossRef]
- Cowles, M.K.; Carlin, B.P. Markov Chain Monte Carlo Convergence Diagnostics: A Comparative Review. J. Am. Statal Assoc. 1996, 91, 883–904. [Google Scholar] [CrossRef]
- Myers, R.A.; Mertz, G. Reducing uncertainty in the biological basis of fisheries management by meta-analysis of data from many populations: A synthesis. Fish. Res. 1998, 37, 51–61. [Google Scholar] [CrossRef]
- Wang, M.; Liu, Q.; Fu, L.; Wang, G.; Zhang, X. Airborne LIDAR-Derived Aboveground Biomass Estimates Using a Hier-archical Bayesian Approach. Remote Sens. 2019, 11, 1050. [Google Scholar] [CrossRef]
- Zhang, X.; Duan, A.; Zhang, J.; Xiang, C.; Hui, C.; Julliard, R. Estimating Tree Height-Diameter Models with the Bayesian Method. Sci. World J. 2014, 2014, 683691. [Google Scholar] [CrossRef] [PubMed]
- Berger, J.; Berry, D.A. Statistical analysis and the illusion of objectivity. Am. Sci. 1988, 76, 159–165. [Google Scholar]
- Zianis, D.; Spyroglou, G.; Tiakas, E.; Radoglou, K.M. Bayesian and Classical Models to Predict Aboveground Tree Biomass Allometry. For. Sci. 2016, 62, 247–259. [Google Scholar] [CrossRef]
- Ver Planck, N.R.; Finley, A.O.; Kershaw, J.A.; Weiskittel, A.R.; Kress, M.C. Hierarchical Bayesian models for small area estimation of forest variables using LiDAR. Remote Sens. Environ. 2018, 204, 287–295. [Google Scholar] [CrossRef]
- Bureau, C.F. The Eighth Forest Resource Survey Report; Chinese Forestry Press: Beijing, China, 2014. [Google Scholar]
- Wang, C. Biomass allometric equations for 10 co-occurring tree species in Chinese temperate forests. For. Ecol. Manag. 2006, 222, 9–16. [Google Scholar] [CrossRef]
- Dong, L.; Zhang, L.; Li, F. Developing Two Additive Biomass Equations for Three Coniferous Plantation Species in Northeast China. Forests 2016, 7, 136. [Google Scholar] [CrossRef]
- Zhao, X.; Guo, Q.; Su, Y.; Xue, B. Improved progressive TIN densification filtering algorithm for airborne LiDAR data in forested areas. ISPRS J. Photogramm. 2016, 117, 79–91. [Google Scholar] [CrossRef]
- Schnabel, R.; Klein, R. Octree-based Point-Cloud Compression. In Eurographics Symposium on Point-Based Graphics; Botsch, M., Chen, B., Eds.; The Eurographics Association: Geneve, Switzerland, 2006. [Google Scholar]
- Sharp, G.C.; Lee, S.W.; Wehe, D.K. ICP registration using invariant features. IEEE Trans. Pattern Anal. Mach. Intell. 2002, 24, 90–102. [Google Scholar] [CrossRef]
- Theiler, P.W.; Wegner, J.D.; Schindler, K. Globally consistent registration of terrestrial laser scans via graph optimization. ISPRS J. Photogramm. 2015, 109, 126–138. [Google Scholar] [CrossRef]
- Zhang, K.; Chen, S.; Whitman, D.; Shyu, M.; Yan, J.; Zhang, C. A progressive morphological filter for removing nonground measurements from airborne LIDAR data. IEEE Trans. Geosci. Remote Sens. 2003, 41, 872–882. [Google Scholar] [CrossRef]
- Kipinski, L.; Konig, R.; Sieluzycki, C.; Kordecki, W. Application of modern tests for stationarity to single-trial MEG data: Transferring powerful statistical tools from econometrics to neuroscience. Biol. Cybern. 2011, 105, 183–195. [Google Scholar] [CrossRef] [PubMed]
- Gander, W.; Golub, G.H.; Strebel, R. Least-squares fitting of circles and ellipses. BIT Numer. Math. 1994, 4, 558–578. [Google Scholar] [CrossRef]
- Cabo, C.; Ordóñez, C.; López-Sánchez, C.A.; Armesto, J. Automatic dendrometry: Tree detection, tree height and diameter estimation using terrestrial laser scanning. Int. J. Appl. Earth Obs. 2018, 69, 164–174. [Google Scholar] [CrossRef]
- Amiri, N.; Polewski, P.; Heurich, M.; Krzystek, P.; Skidmore, A.K. Adaptive stopping criterion for top-down segmentation of ALS point clouds in temperate coniferous forests. ISPRS J. Photogramm. 2018, 141, 265–274. [Google Scholar] [CrossRef]
- Hansen, E.; Ene, L.; Mauya, E.; Patočka, Z.; Mikita, T.; Gobakken, T.; Næsset, E. Comparing Empirical and Semi-Empirical Approaches to Forest Biomass Modelling in Different Biomes Using Airborne Laser Scanner Data. Forests 2017, 8, 170. [Google Scholar] [CrossRef]
- Dong, L. Developing Individual and Stand-Level Biomass Equations in Northeast China Forest Area. Ph.D. Thesis, Northeast Forestry University, Harbin, China, 2015. (In Chinese). [Google Scholar]
- Lindstrom, M.J.; Bates, D.M. Nonlinear Mixed Effects Models for Repeated Measures Data. Biometrics 1990, 46, 673–687. [Google Scholar] [CrossRef] [PubMed]
- Baayen, R.H.; Davidson, D.J.; Bates, D.M. Mixed-effects modeling with crossed random effects for subjects and items. J. Mem. Lang. 2008, 59, 390–412. [Google Scholar] [CrossRef]
- Arhonditsis, G.B.; Stow, C.A.; Steinberg, L.J.; Kenney, M.A.; Lathrop, R.C.; McBride, S.J.; Reckhow, K.H. Exploring eco-logical patterns with structural equation modeling and Bayesian analysis. Ecol. Model. 2006, 192, 385–409. [Google Scholar] [CrossRef]
- Carlin, B.P.; Louis, T.A. Bayes and empirical bayes methods for data analysis. Stats Comput. 1998, 2, 153–164. [Google Scholar]
- Heidelberger, P.; Welch, P.D. A spectral method for confidence interval generation and run length control in simulations. Commun. ACM 1981, 4, 233–245. [Google Scholar] [CrossRef]
- Heidelberger, P.; Welch, P.D. Simulation run length control in the presence of an initial transient. Oper. Res. 1983, 31, 1109–1144. [Google Scholar] [CrossRef]
- Saud, P.; Lynch, T.B.; Anup, K.C.; Guldin, J.M. Using quadratic mean diameter and relative spacing index to enhance height–diameter and crown ratio models fitted to longitudinal data. Forestry 2016, 89, 215–229. [Google Scholar] [CrossRef]
- Raptis, D.I.; Kazana, V.; Kazaklis, A.; Stamatiou, C. Mixed-effects height–diameter models for black pine (Pinus nigra Arn.) forest management. Trees 2021, 35, 1167–1183. [Google Scholar] [CrossRef]
- Brede, B.; Terryn, L.; Barbier, N.; Bartholomeus, H.M.; Bartolo, R.; Calders, K.; Derroire, G.; Krishna Moorthy, S.M.; Lau, A.; Levick, S.R.; et al. Non-destructive estimation of individual tree biomass: Allometric models, terrestrial and UAV laser scanning. Remote Sens. Environ. 2022, 280, 113180. [Google Scholar] [CrossRef]
- Yang, Q.; Su, Y.; Jin, S.; Kelly, M.; Hu, T.; Ma, Q.; Li, Y.; Song, S.; Zhang, J.; Xu, G. The Influence of Vegetation Character-istics on Individual Tree Segmentation Methods with Airborne LiDAR Data. Remote Sens. 2019, 11, 2880. [Google Scholar] [CrossRef]
- Zhang, X.; Zhang, J.; Duan, A. A Hierarchical Bayesian Model to Predict Self-Thinning Line for Chinese Fir in Southern China. PLoS ONE 2015, 10, e139788. [Google Scholar] [CrossRef]
- Zhang, X.; Zhang, J.; Duan, A. Tree-height growth model for Chinese fir plantation based on Bayesian method. Sci. Silvae Sin. 2014, 50, 69–75. (In Chinese) [Google Scholar]
- Saatchi, S.S.; Houghton, R.A.; Alvala, R.C.D.S.; Soares, J.V.; Yu, Y. Distribution of aboveground live biomass in the amazon basin. Glob. Chang. Biol. 2010, 13, 816–837. [Google Scholar] [CrossRef]
- Chave, J.; Condit, R.; Aguilar, S.; Hernandez, A.; Perez, R. Error propagation and scaling for tropical forest biomass esti-mates. Philos. Trans. R. Soc. B Biol. Sci. 2004, 359, 409–420. [Google Scholar] [CrossRef]


| Regions | Forest Stages | Planting Years | Plot Number | N | DBH (cm) | TH (m) | Reference AGB (kg) | |||
|---|---|---|---|---|---|---|---|---|---|---|
| Mean | Std | Mean | Std | Mean | Std | |||||
| A1 | Middle-age forest | 1990 | 1 | 61 | 19.53 | 5.16 | 17.78 | 2.65 | 152.81 | 93.41 |
| 1990 | 2 | 62 | 19.98 | 5.28 | 17.62 | 2.95 | 157.56 | 89.94 | ||
| A2 | Near-mature forest | 1985 | 3 | 51 | 23.67 | 7.03 | 22.63 | 2.48 | 337.45 | 144.17 |
| 1985 | 4 | 47 | 28.73 | 6.29 | 23.36 | 2.04 | 401.08 | 171.83 | ||
| A3 | Mature forest | 1978 | 5 | 64 | 22.86 | 5.43 | 21.12 | 2.87 | 243.75 | 114.67 |
| 1978 | 6 | 32 | 28.61 | 5.14 | 24.41 | 1.30 | 410.56 | 141.23 | ||
| 1978 | 7 | 28 | 30.25 | 3.66 | 24.83 | 1.01 | 457.95 | 114.41 | ||
| 1978 | 8 | 25 | 32.97 | 6.99 | 24.42 | 3.17 | 546.15 | 185.02 | ||
| Algorithms | r * | p * | F * | TP (1:1 Matched Trees) | FP | FN |
|---|---|---|---|---|---|---|
| CSP | 0.90 | 0.94 | 0.92 | 337 | 20 | 33 |
| RHCSA | 0.88 | 0.93 | 0.90 | 327 | 24 | 43 |
| Algorithms | N | Parameters | R2 | RMSE | rRMSE (%) |
|---|---|---|---|---|---|
| CSP | 337 | DBH | 0.983 | 1.017 | 4.9 |
| TH | 0.923 | 1.494 | 8.3 | ||
| CPA | 0.527 | 29.258 | 607.3 | ||
| RHCSA | 327 | DBH | 0.990 | 1.024 | 4.8 |
| TH | 0.934 | 1.247 | 7.3 | ||
| CPA | 0.905 | 3.874 | 43.7 |
| Model No. | Model Forms | Classical Approach | Bayesian Approach | ||
|---|---|---|---|---|---|
| AIC | BIC | DIC | Stationarity Test | ||
| I | 3308.285 | 3319.655 | 3297.941 | Passed | |
| II | 3044.183 | 3059.343 | 3036.874 | Passed | |
| III | 3309.353 | 3324.513 | 3307.981 | Passed | |
| IV | 3743.494 | 3758.654 | - | Failed | |
| V | 3039.067 | 3058.017 | 3032.190 | Passed | |
| Types | Parameters | NLS | NLME |
|---|---|---|---|
| Fixed effects | 0.024 (0.004) | 0.026 (0.004) | |
| 1.795 (0.036) | 1.807 (0.035) | ||
| 1.128 (0.057) | 1.102 (0.060) | ||
| 0.032 (0.012) | 0.023 (0.013) | ||
| Random effect | - | 0.0053 | |
| Fitting | 0.979 | 0.981 | |
| 24.893 | 24.183 | ||
| 3039.067 | 3029.853 | ||
| 3058.017 | 3052.593 |
| Methods | Parameters | Sample Sizes (Proportions) | ||||
|---|---|---|---|---|---|---|
| 34 (10%) | 82 (25%) | 164 (50%) | 246 (75%) | 327 (100%) | ||
| Hierarchical Bayesian | 0.014 (0.004) | 0.028 (0.001) | 0.032 (0.005) | 0.027 (0.003) | 0.025 (0.002) | |
| 2.029 (0.051) | 1.759 (0.002) | 1.790 (0.038) | 1.807 (0.012) | 1.801 (0.030) | ||
| 1.086 (0.112) | 1.087 (0.102) | 1.105 (0.053) | 1.084 (0.041) | 1.107 (0.036) | ||
| 0.009 (0.020) | 0.079 (0.001) | 0.033 (0.016) | 0.029 (0.010) | 0.031 (0.011) | ||
| FI | 0.987 | 0.984 | 0.983 | 0.981 | 0.980 | |
| RMSE (kg) | 14.866 | 22.317 | 22.372 | 24.491 | 24.863 | |
| NLME | 0.012 (0.006) | 0.025 (0.007) | 0.030 (0.006) | 0.027 (0.005) | 0.026 (0.004) | |
| 2.029 (0.141) | 1.756 (0.069) | 1.807 (0.058) | 1.808 (0.041) | 1.807 (0.035) | ||
| 1.124 (0.185) | 1.124 (0.107) | 1.051 (0.080) | 1.083 (0.069) | 1.102 (0.060) | ||
| 0.009 (0.041) | 0.078 (0.023) | 0.025 (0.020) | 0.023 (0.015) | 0.023 (0.013) | ||
| FI | 0.987 | 0.981 | 0.981 | 0.980 | 0.981 | |
| RMSE (kg) | 21.662 | 23.856 | 23.542 | 25.006 | 24.146 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, M.; Im, J.; Zhao, Y.; Zhen, Z. Multi-Platform LiDAR for Non-Destructive Individual Aboveground Biomass Estimation for Changbai Larch (Larix olgensis Henry) Using a Hierarchical Bayesian Approach. Remote Sens. 2022, 14, 4361. https://doi.org/10.3390/rs14174361
Wang M, Im J, Zhao Y, Zhen Z. Multi-Platform LiDAR for Non-Destructive Individual Aboveground Biomass Estimation for Changbai Larch (Larix olgensis Henry) Using a Hierarchical Bayesian Approach. Remote Sensing. 2022; 14(17):4361. https://doi.org/10.3390/rs14174361
Chicago/Turabian StyleWang, Man, Jungho Im, Yinghui Zhao, and Zhen Zhen. 2022. "Multi-Platform LiDAR for Non-Destructive Individual Aboveground Biomass Estimation for Changbai Larch (Larix olgensis Henry) Using a Hierarchical Bayesian Approach" Remote Sensing 14, no. 17: 4361. https://doi.org/10.3390/rs14174361
APA StyleWang, M., Im, J., Zhao, Y., & Zhen, Z. (2022). Multi-Platform LiDAR for Non-Destructive Individual Aboveground Biomass Estimation for Changbai Larch (Larix olgensis Henry) Using a Hierarchical Bayesian Approach. Remote Sensing, 14(17), 4361. https://doi.org/10.3390/rs14174361